爬壁机器人气压吸附及磁吸附专利技术综述
2017-07-09 15:23赵彦文黎开虎
科学与财富 2017年18期
赵彦文+黎开虎
摘 要: 爬壁机器人可以吸附在不同材质的垂直或者倾斜面上,进行各种极限条件下的作业任务,气压吸附和磁吸附方式是爬壁机器人技术领域最成熟应用最广泛的吸附方式。
关键词: 机器人;爬壁;吸附
前言
爬壁机器人是移动机器人领域的一个重要分支,它把地面移动机器人技术与吸附技术有机结合起来,可在垂直壁面上附着爬行,并能携带工具完成一定的作业任务,大大扩展了机器人的应用范围。本文将着重对爬壁机器人气压吸附及磁力吸附的专利技术发展路线进行梳理。
1.爬壁机器人吸附方式概述
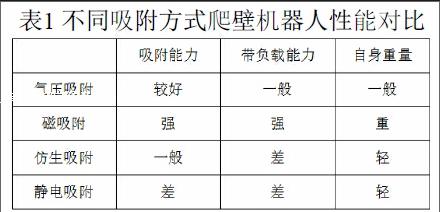
攀爬机器人的设计需要针对工作任务、环境,选择合适的吸附方式。目前,吸附方式主要有气压吸附、磁吸附、仿生吸附以及静电吸附,这些吸附方式有各自的优势,也有各自的局限性,所研制的爬壁机器人往往针对性较强,例如在玻璃或光滑壁面上工作时,主要采用真空吸附或者仿生吸附,在钢制壁面上主要采用磁力吸附,在金属等材料相互混杂的壁面上主要采用静电吸附,在复杂壁面上或者是弯曲壁面上大多采用混合吸附方式。各种吸附方式的性能对比,参见表1。
2.氣压吸附及磁吸附的发展路线
2.1 气压吸附
真空吸附法是通过真空发生装置,使吸盘内腔产生负压,机器人利用吸盘内外的压力差贴附在壁面上。真空吸附法由于不受壁面材质的限制,适应范围广,但当壁面凹凸不平时吸盘容易漏气,从而吸附力下降,承载能力降低。推力吸附借鉴了航空技术,使用螺旋浆或涵道风扇产生合适的推力,使机器人稳定、可靠地贴附在壁面上,并在壁面上移动。这种吸附方式具有壁面适应性好,越障容易等优点,但控制系统复杂。
在气压方面,从最初的日本大阪府立工学部的西亮教授于1966年研制出来的垂直壁面移动机器人样机,利用电风扇进气侧的低压作用作为吸附力开始,一直到1973年才有正式记录的专利申请,即专利申请号为JP4607373A的由日本的本田技研工业株式会社申请的利用风扇吸气产生内部外部压力差的爬壁机器人,后期针对气压的爬壁机器人进行了相应的改进,但问题在于,这些改进更多的是集中在爬壁机器人的行走方式上,而对于吸附方式却没有实际意义的革命性发展;到1995年由本田技研工业株式会社就利用负压吸盘进行吸附的爬壁机器人申请了专利,专利申请号为JP1820995A;之后的一段时间内针对单吸盘与多吸盘的气压式吸附爬壁机器人专利申请量很大,而这些申请里大多是利用轮式、履带式作为行走方式的;到2001年,有ASPECT与日立公司联合申请的利用真空泵抽出吸盘内的气体,利用真空的低压进行吸附的爬壁机器人,专利申请号为JP2001253768A。
在之后的发展中,中国的大专院校占据了绝对的申请量,在质量上也非常的优秀,如2007年哈尔滨工业大学申请的仿蜘蛛吸盘机器人,专利申请号为CN200710072319;2008年北京理工大学申请的负压与反推力结合实现的吸附方式,专利申请号为CN200810227554,需要强调的是该专利将两种吸附方式进行结合,可以有效的提高吸附的成功率与稳定性;2012年华东理工大学申请的针对不平墙面的非接触吸附,专利申请号为CN201010617410,该申请针对非平整墙面的吸附方式进行了相应的改进。
2.2 磁吸附
磁吸附法要求壁面必须是导磁材料,但它结构简单、吸附力大,对壁面的凹凸适应性强,不存在气压吸附法的漏气问题,因而当壁面材料导磁时,使用磁吸附式爬壁机器人有它突出的优点。
在磁力吸附方面,最早的申请来自UNIVERSAL CRAWLER CO LTD申请的履带式电磁吸附爬壁机器人,专利申请号为DE2413688A,该申请利用履带的连续性以及与墙壁接触面积大的优点,可以使爬壁机器人能够向履带式全地形车在地面上行走一样,可以在墙壁表面持续的全方向行走,为爬壁机器人的工业推广奠定了基础;之后到1985年株式会社东芝就利用永磁体的爬壁机器人申请了专利,专利申请号为JP7356884A,相对于电磁吸附,永磁吸附的优点在于,其可以提供持续的吸附力度,缺点在于磁力的开启与切断较难实现,以及吸附力的控制方面可能弱于电磁体;1992年日立金属公司就履带式永磁体吸附方式技术申请了专利,专利申请号为JP30956992。
在90年代之后,中国在磁吸附方面的专利申请量开始呈现爆发之势,这也得益于中国在90年代开始在工业方面开始大踏步前进,促使了工业爬壁机器人的需求量增加。2005年,清华大学就利用非接触式永磁吸附方式的爬壁机器人申请了专利,专利号为CN200510086383;2010年,九江精密测试技术研究所就磁吸附与推力吸附复合吸附申请了专利,其利用两种吸附方式结合的创新,使爬壁机器人在吸附稳定方面取得了一定的进步,申请号为CN201020548859;2012年浙江大学就曲面自适应磁吸附装置,利用了磁轮加磁块的磁吸附方式申请了相关专利,专利申请号为CN201210540925。
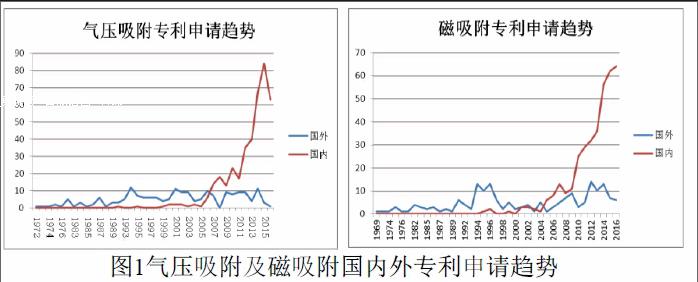
2.3气压吸附及磁吸附国内外专利申请趋势
虽然国内气压吸附与磁吸附爬壁机器人专利申请相对于国外起步略晚,但之后的发展速度很快,在2005年之后国内申请量已经远远超过了国外,也从侧面显示出我国在气压吸附及磁吸附爬壁机器人领域的取得了一定的成绩。
3 结语
爬壁机器人吸附方式仍然是爬壁机器人研究的热点,也仍然是爬壁机器人应用推广的瓶颈。其中,气压吸附和磁吸附技术已经非常成熟,在许多领域都有比较好的应用,而且国内的相关专利申请在“量”上已经远超国外,但是今后在“质”方面还有更进一步的空间。另外,需要强调的是仿生吸附和静电吸附也是未来爬壁机器人吸附领域的发展热点,这需要国家和企业更多的资金投入以及高校和研究所更多的技术投入。■
猜你喜欢
力学学报(2022年6期)2022-07-10
中国特种设备安全(2021年12期)2021-04-26
安徽农学通报(2016年21期)2016-12-22
科技创新导报(2016年21期)2016-12-17
企业技术开发·中旬刊(2016年10期)2016-11-12
广东石油化工学院学报(2016年6期)2016-05-17
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
应用技术学报(2014年1期)2014-02-28