橡胶履带底盘的研究进展
2018-06-06 10:59岳高峰
重庆理工大学学报(自然科学) 2018年5期
张 拓,岳高峰,刘 妤
(1.重庆理工大学 机械工程学院, 重庆 400054; 2.重庆市农业机械鉴定站, 重庆 632160)
我国是一个农业大国,耕地主要分布在山地、高原和丘陵地区[1]。这些地区地形复杂,作业环境恶劣。普通轮式底盘接地比压较大,抓地能力差,工作时打滑现象严重,因此不能稳定地工作;而金属履带底盘受材料的限制,导致底盘整体质量偏大,因此对地面破坏较为严重[2]。可见,目前迫切需要一种适用于丘陵山区农业机械的动力底盘。
橡胶履带底盘集成了轮式底盘和金属履带底盘的优点,使其配套机械接地比压小、牵引性好、转向灵活;机动性好,可靠性强;越野能力强,作业效率高;操纵舒适性良好,噪声低,缓冲性好,不失为丘陵山区农业机械动力底盘的一种优选方案。本文总结了橡胶履带底盘的典型结构和转向方式,概述了该类底盘的国内外研究进展以及虚拟样机技术在履带底盘研究中的应用,并探讨了橡胶履带底盘研发中存在的问题及未来的发展方向。
1 橡胶履带底盘的特点
1.1 橡胶履带底盘的分类
如图1所示,橡胶履带底盘行走系由履带行走装置、悬架和车架等3部分组成[3-4]。其中,履带行走装置主要由驱动轮、张紧轮、履带、台车架、支重轮、拖带轮和张紧装置等组成;悬架装置由悬架和台车架组成,其作用是连接行走装置和车架部分,保证车辆工作时的可靠性;车架部分主要用于固定车辆的各部件和配套工作部件,保证车辆工作时的稳定性。

1.驱动轮; 2.履带; 3.支重轮; 4.台车架;5.张紧装置;6.张紧轮;7.车架;8.悬架;9.拖带轮
按照台车架的结构和驱动轮的布置方式不同,橡胶履带底盘可以分为整体台车架式履带底盘、平衡台车架式履带底盘、独立台车架式履带底盘和三角履带底盘等4种结构[5-7]。下面分别进行介绍。
1) 整体台车架式履带底盘。这种履带底盘的典型结构如图2所示,行走装置的各部件通过连接件直接固定在台车架上。底盘工作时,各部件位置相对固定,支重轮的排布比较均匀,所以对地面的压力相对均匀,适用于行驶速度较低的车辆[8]。这种履带底盘结构简单,空间充裕,农具的布置和安装比较方便,因此在农用机械中应用比较广泛。

图2 整体台车架式履带底盘
2) 平衡台车架式履带底盘。这种履带底盘的典型结构如图3所示,每侧有2~3个平衡台车,支重轮之间通过平衡杠杆和弹性元件连接,并与驱动轮、拖带轮、导向轮固定在车架上[9-10]。底盘工作时,平衡台车上的支重轮能结合实际路况进行自动调整,从而减小行驶过程中的振动,改善平顺性。这种履带底盘比较适用于行驶速度较高的车辆。

图3 平衡台车架式履带底盘
3) 独立台车架式履带底盘。这种履带底盘的典型结构如图4所示,每一个支重轮通过弹性构件与车架相连[11]。底盘工作时,每一个支重轮都可以根据路况调整位置,从而减小行驶过程中的振动,改善平顺性。但是,这种履带底盘结构复杂且制造成本高,因此民用领域应用较少,常用于高速军用履带车辆。
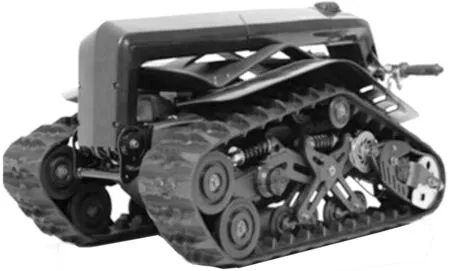
图4 独立台车架式履带底盘
4) 三角履带底盘。这种履带底盘的典型结构如图5所示,驱动轮、张紧轮和导向轮分别位于三角形履带的各顶点处[12]。由于驱动装置位于三角形的顶部,因而提高了底盘的离地高度,确保了履带底盘的离地间隙,使履带车辆能满足多数农作物收获的离地间隙需求。这种履带底盘具有良好的通过性能和优良的越障性能,在农用履带车辆中应用比较广泛。

图5 农夫NF-702轻型履带拖拉机
1.2 履带式动力底盘转向机构的分类
与轮式车辆的转向不同的是,履带式底盘的转向是通过改变行走装置两侧的驱动力来实现的,这也导致履带式车辆很难按照驾驶员意愿在任意速度下实现任意半径的转弯。随着农用履带车辆功率的增大和车速的提高,其转向性能的要求也越来越高[13]。
按照驱动方式的不同,履带式底盘的转向机构大致可以分为纯机械驱动转向机构、纯液压驱动转向机构和液压机械联合驱动转向机构等3类。下面分别进行介绍。
1) 纯机械驱动转向机构。这种转向机构包括离合器和制动器、单差速器、双差速器、单级行星机构等几种类别[14],主要用于重型履带车辆。其主要特点是结构比较紧凑、制造比较方便、耐磨,对保养的要求不高。但是,随着功率和车速的提高,这种转向机构在应用上会受到一定的限制,而且直线度不太好,转向时操作比较麻烦,无法完成原地转向。
2) 纯液压驱动转向机构。这种转向机构主要分为静液压驱动系统(HST)和双变量泵与双定量马达驱动系统,常用于工程机械的驱动装置。相对于机械驱动而言,液压驱动能实现无级变速,且元件体积较小,在底盘上配置比较灵活,但是,其成本高、效率低。双变量泵与双定量马达驱动系统以2套独立的HST装置分别驱动左右两侧驱动轮,并依靠两侧驱动轮转速差实现差速转向。这种系统操作性、通过性和机动性良好,且具有功率密度高、布局方便、过载保护能力强等优点[15],但是,其生产成本较高,在长时间、大负载的工况下,系统发热比较严重,瞬时油耗较高。
3) 液压机械联合驱动转向机构。这种转向机构将发动机的输出功率在多挡变速箱的输入轴上分流,一路流向液压泵-液压马达组成的转向调速系统,通过液压控制转向实现任意转向半径的连续转向,以提高底盘操作的灵活性;另一路流向多挡变速箱,减少转向过程中造成的制动功率损失。这种方式综合了机械传动的高效率和液压传动布置灵活、可实现无级变速等特性,常用于农用履带拖拉机[16]。
1.3 橡胶履带底盘的优势
橡胶履带底盘集成了轮式底盘和金属履带底盘的优点,主要体现在:
1) 接地比压小,通过性好,能确保机械在湿地环境下正常工作,扩展了机械的作业地域。同时,对土壤的压实程度较小,减小了对植物根系的损害程度[15]。
2) 对地面的损坏程度明显低于金属履带底盘。橡胶履带底盘在路上行驶时不会造成地面损坏,因此在转场过程中不需要专门的运输工具,简化了履带底盘的运输方式[17]。
3) 橡胶履带可以吸收部分振动,因此履带底盘工作时产生的振动和噪声相对较小,可以延长机械的使用寿命,减缓驾驶人员的疲劳程度[18]。
4) 行驶速度较金属履带底盘更高。一般芯铁式橡胶履带车辆时速可达15~20 km/h,而摩擦式橡胶履带车辆时速可达40~50 km/h[19]。
5) 省略了履带板、履带销等构件,这不仅可以降低履带自重,简化履带更换流程,而且可以减少因履带内部摩擦而造成的功率损失。
6) 相比轮式底盘和金属履带底盘,橡胶履带底盘与地面的接触面积更大,有利于获取更大的牵引力。
2 橡胶履带底盘的研究进展
随着车辆地面力学和多体动力学相关基础理论的发展,研究人员对履带底盘的运动规律、动力特性的认知也逐步深刻。同时,伴随计算机技术的高速发展,依托三维软件建模、多体动力学和有限元分析等技术发展而来的虚拟样机技术取得了较大进展,研究人员尝试突破传统的针对履带底盘的“试验—试制—试验—改进”设计模式,将虚拟样机技术应用于履带底盘的研究。
2.1 国外研究进展
国外一些研究机构早已将虚拟样机技术应用于履带底盘的研发。
美国陆军坦克-机动车辆研发与工程中心(TARDEC)的Joseph等[20]考虑车辆与土壤之间的耦合作用对履带底盘进行了动力学建模和分析,利用库仑的横向地球压力理论和特尔扎吉的被动土壤失效模型计算了履带底盘运行过程中软土受到的力,并评估了该建模和模拟分析方法在软土地面上的先进性和局限性。
俄罗斯工程科学研究所的Taratorkin等[21]采用虚拟样机与物理样机试验相结合的方式研究了车辆履带运动轨迹变化和功率参数变化,并设计了一套改善车辆运动特性的远程自动控制系统优化方案,较好地提升了履带车辆的高速特性。
韩国海洋工程研究院的Kim等[22-23]提出了一种针对复杂多体履带车辆系统动态分析的子系统综合分析方法。该方法以一款大型的海底硫化物采集装置为对象,将履带车辆系统分解为多个子系统和虚拟无质量参照物进行独立分析,通过对虚拟无质量参照物的位置、速度和加速度等的分析求解得到基体方程,再基于基体方程对各子系统的运动方程进行求解,提高了计算的效率和精度。
印度理工学院的Paul等[24]研究了履带车辆在软地面上的移动性和行驶稳定性,建立了一种软土-履带相互作用力模型,并提出了一种预测履带区域剪切位移的方法。该方法结合履带车辆的位置和方位信息预测履带区域的剪切位移分布,通过与现有方法的比较,验证了方法的可行性。Saayan Banerjee等[25]针对所设计的履带式步兵战车,建立了数学模型,仿真分析了该模型在不同虚拟环境下的性能,并结合分析结果优化了战车设计方案。
印度战斗车辆研究与发展机构的Jothi等[26]对军用履带车辆的动力学特性进行了刚柔耦合分析,通过柔性化处理履带车辆的重要零部件,导入动力学分析软件进行刚柔耦合分析,并将分析结果与实际试验结果进行比较,验证了仿真模型的可靠性和稳定性。
波兰西里西亚理工大学的Tomasz Czapla等[27]利用虚拟仿真技术对高速履带在崎岖地形工作时的悬架系统进行了分析,建立了高速履带悬架系统的模型,利用动力学软件和Matlab / SIMULINK联合仿真模拟了不同张紧力对履带车辆行驶性能的影响,确定了张紧力在控制系统中的设置参数。
澳大利亚新南威尔士大学的Xu等[28]针对履带车辆在复杂地形下运动轨迹不稳定的问题,基于虚拟滑移误差矢量模型提出了一种自适应的最小值-最大值模型预测控制方法,提高了履带车辆轨迹预测的精度和鲁棒性。
2.2 国内研究进展
国内对于履带底盘性能的研究起步较晚,主要采用传统的“物理样机”研发方式。目前已有部分高校和研究机构尝试将虚拟样机技术应用于履带底盘的研究。
装甲兵工程学院的郭晓林等[29-30]基于模型试验设计了一种履带车辆动力学性能研究方案。该方案设计了一款利用伺服电机驱动的履带模型车,基于数据采集结果对模型车的性能进行了分析,并进一步研究了履带车辆的行驶性能和行驶阻力,这对于履带车辆的动力学研究有一定的指导意义。王红岩等[31]对履带车辆的建模和仿真方法进行了详细的阐述,并介绍了一种利用动力学模型替代物理样机在极限工况、破坏性、危险性工况以及特殊要求试验工况下试验的方法,确保了试验车辆及人员的安全,提高了试验效率。芮强等[32]提出了一种基于蒙特卡罗随机模拟分析与确定性虚拟样机模型相结合的建模方法,并结合履带车辆接地压力的计算实例,详细介绍了该建模方法,为在不确定性环境下履带车辆的牵引特性和机动性的评估奠定了基础。吴奕等[33]研究了高速履带车辆行驶的平顺性,通过将路面不平度和车辆行驶速度相结合对模型进行了仿真分析,同时,在仿真环境下通过采集车体典型部件的振动响应分析了其振动特性,为履带车辆平顺性研究提供了参考。
洛阳理工学院的田全忠等[34]针对传统的履带车辆采用转向离合器实现转向存在的问题,提出了机械液压双功率流速差转向系统的设计构思,推导了履带底盘输出转速、扭矩的解析表达式,并利用试验验证了设计理论的正确性和可行性。
长春机械研究所的刘国民等[35]对影响履带底盘转向的诸多因素如履带接地长度、轨距、履带宽度以及2条履带行进速度等进行了综合考虑,建立了履带底盘转向数学模型,对众多试验数据进行了数值分析,并得出了指导性结论。
四川农业大学的吕小荣等[36]针对我国西南丘陵山区地形及套作种植的特点,设计了一种小型多功能底盘液压系统。该系统可以实现机器的无级变速和原地转向,有效解决了套作地头空间转向问题。爬坡试验结果表明,样机能平稳通过小于25°的斜坡,可以满足西南丘陵山区行走作业的基本要求。
中国农业大学赵建柱等[37]设计了一种具有农用仿形功能的农用动力底盘。该底盘在每个减振装置上装有螺旋弹簧液压减振器,其摆臂能随地面不平度变化及底盘承重情况下通过在车架一侧纵向平面摆动实现其具有变刚度的特性。试验结果表明,该底盘满载时最大爬坡度约60%,最高作业速度可达3 km/h,在非道路工况下行驶具有良好的地面仿形、平顺性和通过性。
中国北方车辆研究院的李明勇等[38]利用Simscape软件建立了履带车辆发动机和传动系统的数学模型,借助RecurDyn软件建立了履带车辆行走机构动力学模型和路面模型,并通过联合仿真平台建立了发动机—传动系统—行走机构的联合仿真模型,实现了履带车辆换挡、转向等操作的模拟仿真,提高了动力学分析的准确度,为履带车辆的动力学仿真分析提供了新的思路。
吉林大学的李阳[39]利用RecurDyn/Track HM模块建立了铰接履带车辆的动力学模型,并对该型履带车辆在硬质路面、黏土路面和干沙路面上行驶的爬坡过程进行了仿真。同时,对铰接履带车辆的爬坡能力进行了分析,并通过修改模型的履刺高度参数分析了履刺高度与爬坡性能之间的关系。
江苏大学的李耀明等[40]设计了一种可以实现差逆转向、切边转向和单边制动转向的机构,在对机构转向特性理论分析的基础上,应用RecurDyn软件对其进行了不同工况下的动力学仿真。同时,将该机构安装在履带式联合收割机上进行了实车转向性能试验,结果表明,该机构能显著提高收割机的行走转向性能。
中南大学的陈亚等[41]应用RecurDyn软件对履带车的过沟工况进行了动力学仿真,通过分析履带车过沟不同阶段的运动状态,提出应用速率比衡量履带车的过沟性能,并基于此研究了履带车的重心位置等因素对其过沟性能的影响。结果表明:采用速率比能较好地衡量履带车结构对其过沟性能的影响,重心位置相对于几何中心靠前、靠下均有利于其过沟性能的提升。
河北工业大学的张明路等[42]针对复杂地面环境提出了一种具有被动适应能力的轮—履复合移动机器人,通过分析机器人各构件之间的运动关系,建立了轮—履复合模块的数学模型,分析了机器人的爬坡、翻越台阶等性能,并通过仿真实验验证了结构设计和参数选择的合理性。
3 问题与展望
综观分析,目前针对橡胶履带底盘的开发与研制主要集中在工程机械和军用机械,涉及农用履带机械的甚少。
在研发模式方面,主要以传统模式占主导,这种方式通常需要经过初步设计、样机试制、工业性试验、改进定型和批量生产等环节[43],周期长,数据处理工作繁重。而且,随着履带式底盘应用范围的不断扩大,产品结构越来越复杂,研制物理样机的耗资越来越巨大,传统的产品开发方式难以适应快速变化的市场需求[44]。因此,橡胶履带底盘的研发需改变传统的以样机为主导的模式,充分利用计算机技术和虚拟样机技术,借助工程应用软件建立精确有效、可信度高的仿真模型,在虚拟环境下对履带底盘进行性能评估和系统优化,以减少物理样机的制造与试验,缩短产品开发周期,降低产品开发成本。
在使用功能方面,橡胶履带底盘的研发需要在以下几个方面进行改进:① 加大动力底盘关键部件及配套自动控制系统的研发力度,提高橡胶履带底盘的自动化和信息化水平,提升作业性能;② 进一步优化橡胶履带底盘的结构、驱动方式等,以提高其牵引力和作业效率,降低接地比压,减少对地面的压实程度;③ 提高橡胶履带底盘在丘陵山区的适用性,进一步拓宽动力底盘的使用范围;④ 基于模块化设计理念设计橡胶履带底盘主要功能部件,提高履带底盘的扩展性和移植性。
4 结束语
1) 橡胶履带底盘集成了轮式底盘和金属履带底盘的优点,既能拓宽普通履带底盘的应用范围,也能有效克服金属履带行走系统自身质量过大、对地面破坏严重等固有缺点。随着国民经济的发展,对橡胶履带底盘的要求也在不断提高,橡胶履带底盘正在向模块化、轻型化、通用化、智能化等方向发展。
2) 丘陵山区受坡度大、地块小、形状不规则、机耕道狭窄等条件的制约,其农机作业存在操作难度大、动力耗费大、作业质量差及容易倾翻等诸多问题,这限制了丘陵山区农业机械化的发展。而且,现阶段的丘陵山区农业机械大多以实用性为主,专机专用,涉及农用履带机械尤其是橡胶履带底盘的研究甚少。因此,开展丘陵山区农业机械橡胶履带底盘的研究对于发展丘陵山地农业机械化具有重要意义。
[1] 朱桂英.我国耕地资源可持续利用研究[D].大庆:黑龙江八一农垦大学,2006.
[2] 许学建.履带式高地隙茶园管理机底盘行驶系统设计[D].镇江:江苏大学,2016.
[3] 谢霞,康少华,侍才洪.复杂地形移动底盘技术研究 [J].工程机械,2015,46(3):45-52.
[4] 赵文生.履带式行走机构设计分析[J].湖北农机化,2010(4):1-2.
[5] 袁英.井下应急排水车行走机构的设计研究[D].太原:太原理工大学,2012.
[6] 刘虹玉.微型履带山地拖拉机性能分析与仿真[D].杨凌:西北农林科技大学,2014.
[7] 孙运强.橡胶履带底盘结构设计与实验仿真研究[D].大庆:大庆石油学院,2010.
[8] ZHANG Y N,TAO H.Research on a tracked omnidirectional and crosscountry vehicle [J].Mechanism and Machine Theory,2014,87:18-44.
[9] 杜蒙蒙,姬江涛,杜新武,等.丘陵山区双履带式小型动力底盘设计[J].农机化研究,2013(9):116-124.
[10] 李季.林间微型履带运输机悬架系统设计与平顺性分析[D].哈尔滨:东北林业大学,2016.
[11] 戚殿兴.CB1002履带式拖拉机行走系的研究与设计[D].镇江:江苏大学,2012.
[12] 吕凯, 穆希辉,杜峰坡,等.重载三角橡胶履带轮设计关键问题综述[J].装甲兵工程学院学报,2016,30(1):29-38.
[13] MERHOF W,HACKBARTH E M.履带车辆行驶力学[M].北京:机械工程出版社,1989:71-77,86-87.
[14] 曹付义,周志立,贾鸿社.履带车辆转向机构的研究现状及发展趋势[J].河南科技大学学报(自然科学版),2003(3):89-91.
[15] 郭浩亮,穆希辉,杨小勇,等.四橡胶履带轮式车辆转向力学性能分析与试验 [J].农业工程学报,2016,32(21):79-86.
[16] 刘成元.拖拉机液压机械无级变速传动系统与发动机的合理匹配[J].湖南农机,2014,46(26):44-45.
[17] 熊承杨.SWNZ14型沙滩清洁车底盘设计与通过性研究[D].厦门:厦门理工学院,2015.
[18] 王克成.橡胶履带的用途与性能综述[J].中国橡胶,2011,27(1):36-38.
[19] 王克成.橡胶履带的性能与结构力学[J].世界橡胶工业,2011,27(3):25-33.
[20] JOSEPH B R,PARAMSOTHY J.The shearing edge of tracked vehicleSoil interactions in path clearing applications utilizing Multi-Body Dynamics modeling[J].Journal of Terramechanics,2015,58:39-50.
[21] TARATORKIN V D,TARATORKIN A.Experimental Determination of Kinematic and Power Parameters at the Tracked Vehicle Turning[J].Procedia Engineering,2016,150:1368-1377.
[22] KIM H W,LEE C H,HONG S,et al.Dynamic analysis of a tracked vehicle based on a subsystem synthesis method[C] //Proceed- ings of the ISOPE Ocean Mining Symposium.Daejeon:International Society of Offshore and Polar Engineers,2013:210-214.
[23] LEE C H,KIM H W,HONG S.A study on dynamic behaviors of pilot mining robot according to extremely cohesive soft soil properties[C]//Proceedings of the 10th (2013) ISOPE Ocean Mining and Gas Hydrates Sym- posium.Daejeon:International Society of Off- shore and Polar Engineers,2013,279-285.
[24] PAUL E,SHANKAR K,KANNAN K.Calculation of dynamic shear displacement dis-tribution in soft soil-track interaction mode- lling[C]//18th International Conference of the ISTVS,2014.Daejeon:International Society for Terrain Vehicle Systems,2014.
[25] SAAYAN B,BALAMURUGAN V,KRISHNA-KUMAR R,et al.Ride Comfort Analysis of Math Ride Dynamics Model of Full Tracked Vehicle with Trailing Arm Suspension[J].Procedia Engineering,2016,144:1110-1118.
[26] JOTHI S,BALAMURUGAN V,MALAR M K.Influence of flexible bodies in military tracked vehicle dynamics[J].International Journal of Vehicle Structures and Systems,2016,144:1086-1093.
[27] TOMASZ C,WOJCIECH K,GABRIEL M.Numerical simulation of active track tensioning system for autonomous hybrid vehicle[J].Mechanical Systems and Signal Processing,2017,89(15):108-118.
[28] XU W,JAVAD T,JAY K.Robust Model Predictive Control for Path Tracking of a Tracked Vehicle with a Steerable Trailer in the Presence of Slip[J].IFAC-PapersOnLine,2016,49(16):469- 474.
[29] 郭晓林,赵炎,刘国强,等.基于模型试验的履带车动力学研究方案设计[J].农业装备与车辆工程,2015,53(9):17-20.
[30] 郭晓林,杜传沛.基于模型试验的履带车直线行驶阻力研究[J].农业装备与车辆工程,2016,9(8):47-49.
[31] 王红岩,芮强.履带车辆虚拟样机技术及其应用[M].北京:国防工业出版社,2015.
[32] 芮强,王红岩,陈晓军.基于蒙特卡罗方法的履带车辆地面系统随机虚拟样机建模及应用[J].装甲兵工程学院学报,2013,27(1):32-36.
[33] 吴奕,郝丙飞.基于ADAMS/ATV的高速履带车辆建模与仿真[J].农业装备与车辆工程,2017,55(5):46-50.
[34] 田全忠,李文娟,杨德芹,等.橡胶履带车辆差速转向系统的研究[J].拖拉机与农用运输车,2008,35(4):15-17.
[35] 刘国民,黄海东,张萃.履带底盘转向解析[J].中国工程机械学报,2010,8(3):309-313.
[36] 吕小荣,丁为民,吕小莲.丘陵山区小型多功能底盘液压系统的设计[J].华中农业大学学报,2014,33(3):128-132.
[37] 赵建柱,王封辰,于斌,等.农用仿形履带式动力底盘设计与试验[J].农业机械学报,2014,45(9):20-24.
[38] 李明勇,靳建波,卜树峰,等.基于Simscape和RecurDyn的履带车辆动力学仿真技术研究[J].机电产品开发与创新,2014,27(5):690-71.
[39] 李阳,成凯,任鹏.基于RecurDyn的铰接式履带车辆爬坡性能分析[J].煤矿机械,2011,32(7):93-95.
[40] 李耀明,陈劲松,梁振伟,等.履带式联合收获机差逆转向机构设计与试验[J].农业机械学报,2016,47(7):127-134.
[41] 陈亚,尤伟,章易程,等.生命探测履带车过沟性能的仿真分析[J].铁道科学与工程学报,2016,13(10):2051-2055.
[42] 张明路,李凡,吕晓玲,等.被动自适应机器人机构学与运动机理研究[J].华中科技大学学报(自然科学版),2017,45(3):46-50.
[43] 梁健.连续采煤机行走部动力学分析及其疲劳可靠性研究[D].太原:太原理工大学,2010.
[44] 王雷.履带式滩涂运输车行驶性能分析研究 [D].哈尔滨:哈尔滨工业大学,2010.
猜你喜欢
军事文摘(2021年18期)2021-12-02
小学科学(学生版)(2021年6期)2021-07-21
石油化工建设(2019年6期)2020-01-16
小学科学(学生版)(2018年6期)2018-06-26
林业工程学报(2017年4期)2017-08-07
学习月刊(2016年19期)2016-07-11
专用汽车(2016年4期)2016-03-01
橡胶工业(2015年4期)2015-07-29
汽车维修与保养(2015年6期)2015-04-17
汽车维护与修理(2015年5期)2015-02-28