光电子封装用柔性并联运动平台的设计与仿真*
2018-06-05 01:54:22高兆康罗定辉
传感器与微系统 2018年6期
黄 凯, 高兆康, 罗定辉
0 引 言
应用于光电子封装的运动系统设计自20世纪90年代以来,引起了国外学者的重视。Rensselaer Polytechnic Institute的自动化技术中心研制了应用于光电子的微装配系统,能够在大范围内进行粗动,并配置了同样具有4个自由度的精动平台,平动精度为0.02 μm,转动精度为0.05°。德国PI公司研发的H206型光器件耦合对准平台采用并联式设计[1],可以实现6个自由度,最小平动精度能达到0.1 μm,最小转动精度可以达到2μrad。骏河精机的ES6701自动6轴耦合调节架[2],采用串联式结构,所有方向均可控制,适用于单芯光纤、光纤阵列、光波导及各种光学元件等所有器件的自动调芯,平动分辨率可达1 μm,转动分辨率可达0.002 5°。由于串联式的平台组合精度差、刚度不足、误差有累积、回程间隙无法避免,而并联运动平台采用具有高精度、结构紧凑、高刚度、无累积误差等优势[3,4],更适合用于光电子封装场合。传统运动副会使平台存在摩擦、回程间隙和爬行等问题,使其高精度特性大打折扣。柔性铰链通过自身的形变产生角位移,具有无摩擦、高精度、高分辨率、无回程间隙等特点。
本文针对光电子封装的应用背景,针对运动平台的精度、行程等设计要求,提出了一种高精度、大行程的柔性并联运动平台。平台需要实现6个自由度的运动,其运动副低摩擦或无摩擦并且无间隙,平台具有较高的几何精度,驱动部件有较高的精度和平稳性。设计使运动平台具有亚微米级的精度[5](平动精度达到0.86 μm,转动精度达到0.03°),满足了光电子封装中光器件精准耦合的需求。
1 柔性铰链形式的选择
柔性铰链是柔性并联运动平台的关键部件,柔性铰链的转动能力和转动精度直接影响了运动平台的行程和精度。柔性铰链是构建高精密柔性机构的基本单元,基于柔性铰链和并联式结构的柔性并联运动平台承载能力强,刚度高,无累积误差,能够使运动平台达到很高的精度和分辨率[6,7]。
柔性铰链通过自身的形变产生位移,没有运动副本身的相对运。利用有限元仿真的方法先对几种典型的柔性铰链进行仿真,得到对应的最大位移如表1所示。
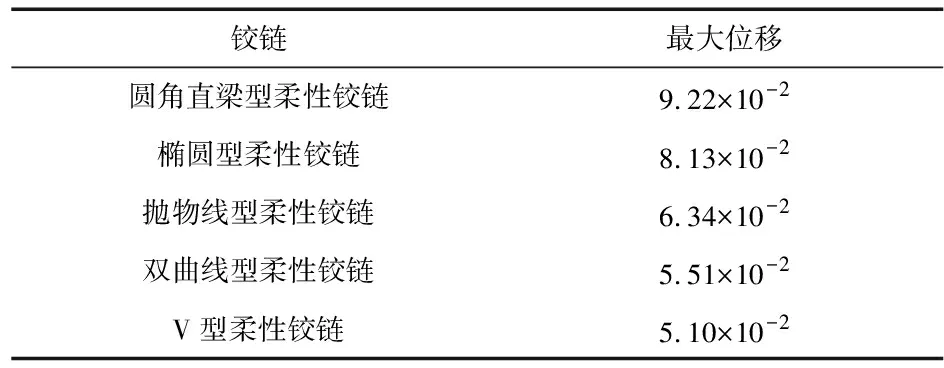
表1 5种典型的柔性铰链性能对比 mm
可以看出,相较于其他常用结构的柔性铰链,圆角直梁型的柔性铰链具有更好的结构特征和机械性能。因此,选择圆角直梁型柔性铰链作为柔性并联运动平台的运动副。
利用有限元软件进行模态计算,导入机械系统动力学自动分析(automatic dynamic analysis of mechanical systems,ADAMS)软件的Flex模块,可以将模态线性叠加到模拟对象以凸显其变形情况,得到柔性铰链的模型如图1所示。

图1 柔性铰链
2 柔性并联平台仿真
2.1 柔性并联平台模型建立
在模型建立过程中,需要在保持并联平台主参数和运动特性不变的情况下,对并联平台模型进行简化,达到既保持虚拟样机的力学模型和运动学模型与并联机器人一致,又去掉大部分对仿真结果无影响的细微结构或零件,从而提高仿真效率。将ADMAS中已经导入模型的铰链全部删除,然后再将图1中所构建的柔性铰链添加到模型当中,添加好约束,如图2所示。
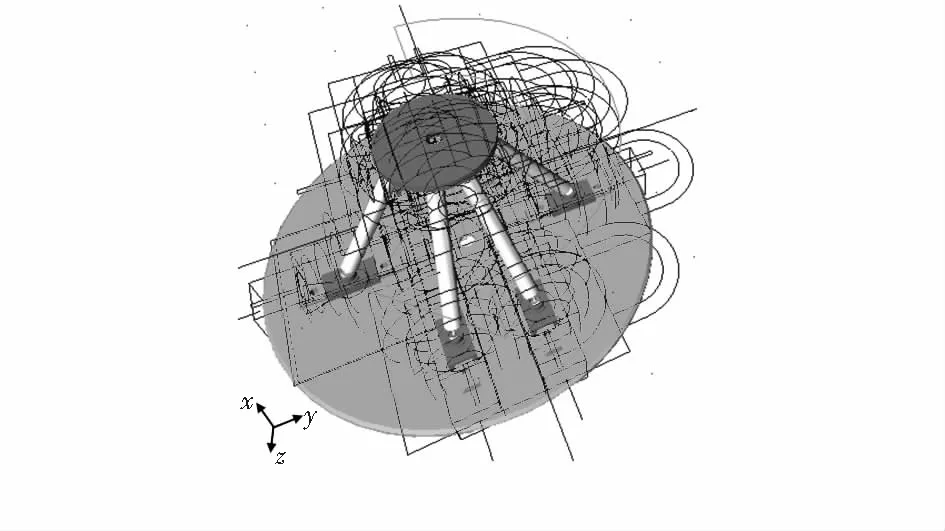
图2 柔性并联平台
在ADAMS中检验模型,该机构具有6个自由度,说明模型建立正确。
2.2 柔性并联平台平动仿真
首先给动平台施加一个平动位移,实现其从原点向y轴正方向运动1 μm,而其他5个方向的位移均保持不变时,6个支链的驱动位移如图3所示。
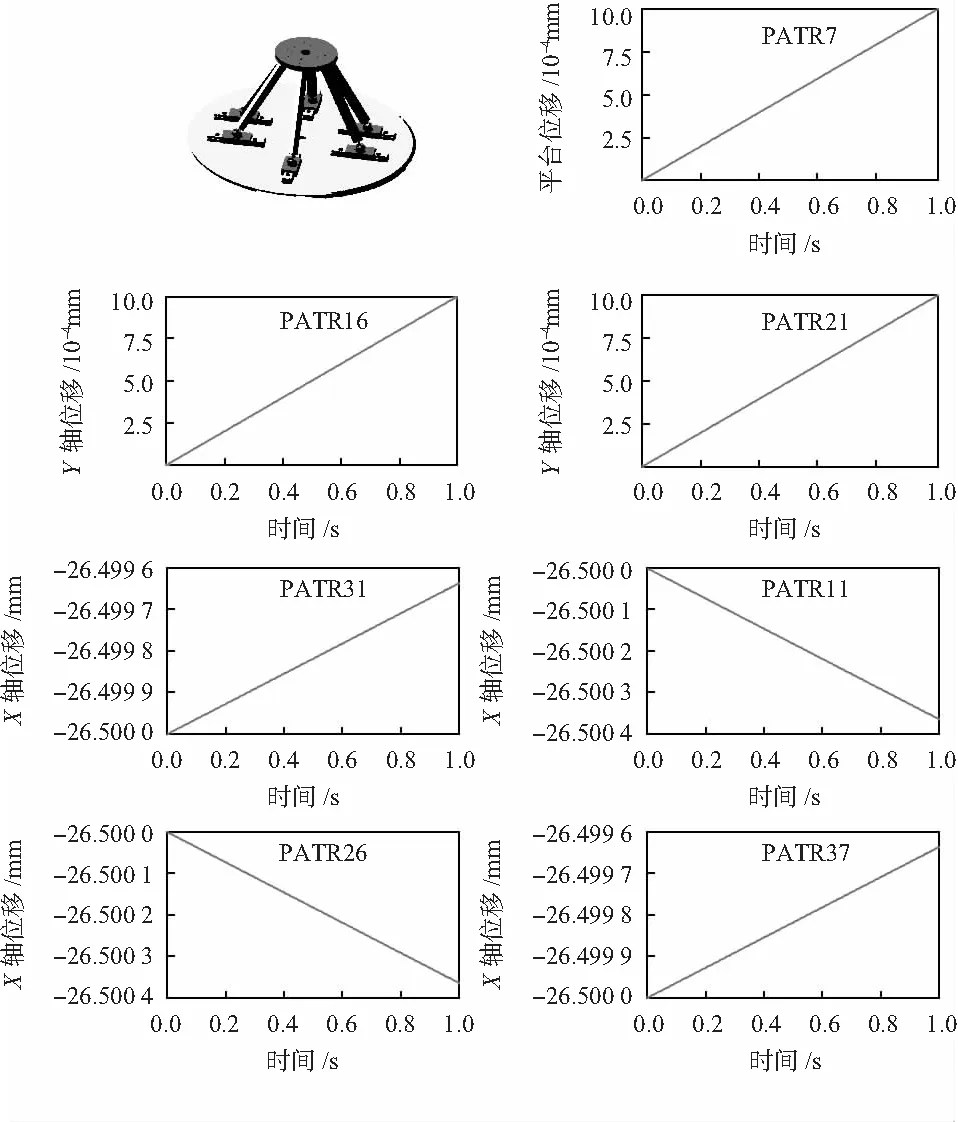
图3 柔性并联平台平动仿真
可以看出,当动平台实现Y正方向1 μm的运动时,运动方向与Y轴相同的2个支链part16,part21驱动位移比较大,达到1 μm,而运动方向与Y轴相垂直的4个支链part6,part11,part26,part31的驱动位移很小,只有0.4 μm。由于动平台在实现Y轴方向的运动时,需要Y方向的驱动位移,因此支链part16,part21驱动位移会比较大;而动平台的位移会使得支链part11,part26,part31与动平台的铰点发生位移,由于支链的长度固定,所以支链part16,part21必然要发生位移,而支链part16,part21的运动方向是与X轴垂直的Y轴方向,所以在Y轴有微小的位移。由结果分析可知:动平台在X方向运动1 μm时,在X和Y方向的位移分别为0.4 μm和1 μm,其平均位移(μm)为
由于选定的驱动部件定位精度优于0.2 μm,得到动平台的平移运动精度(μm)为
X=0.2/0.6×1=0.33
而设计目标精度为0.87 μm,可以认为,动平台平移运动精度达到了设定值。
2.3 柔性并联平台转动仿真
给动平台施加一个转动位移,实现其从位置原点绕Y轴旋转0.03°,而其他5个方向的位移均保持不变时,6个支链的驱动位移如图4所示。
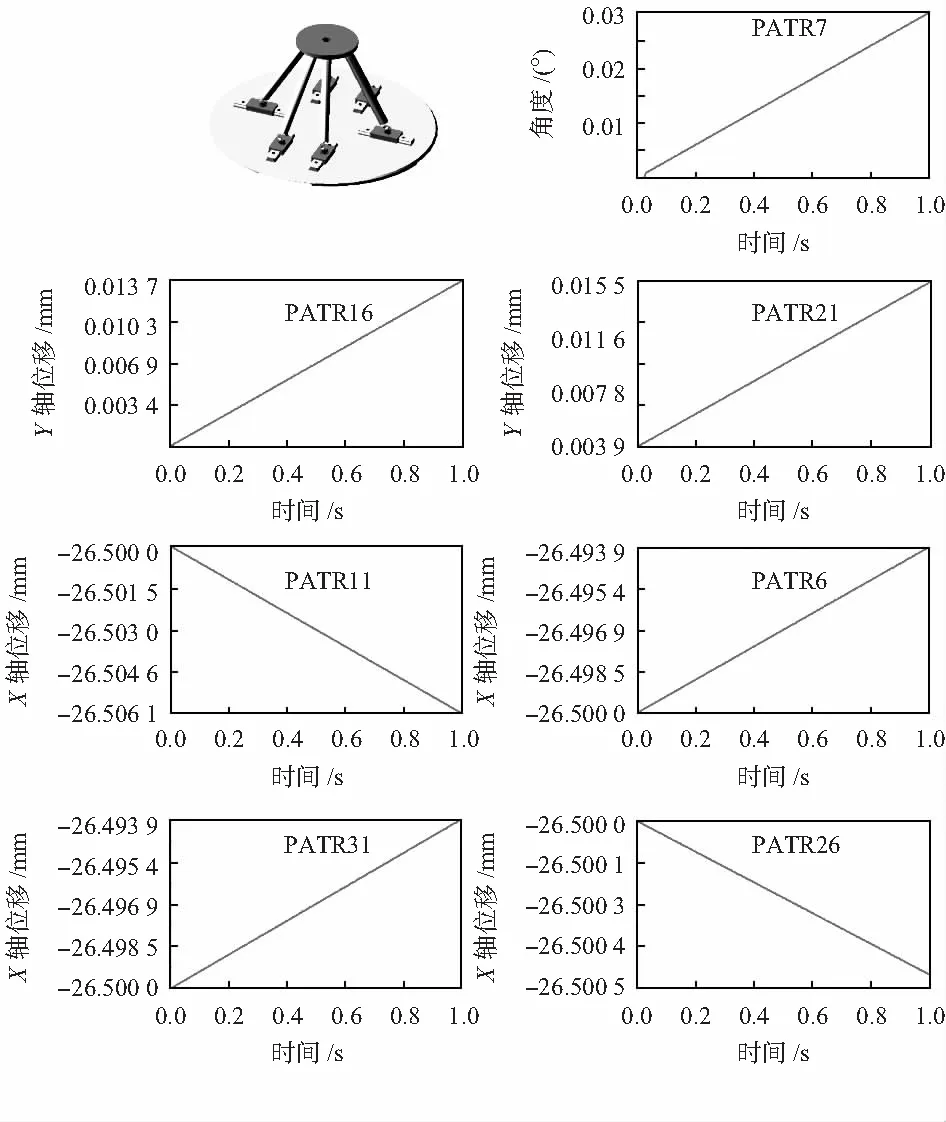
图4 柔性并联平台转动仿真
可以看出,当动平台绕Y轴转动0.03°时,支链Part16,part21驱动位移比较大,分别为15.6μm和13.7 μm,支链part6,part11,part26,part31驱动位移较小,为6.1 μm。由于动平台绕X轴转动角度很小时,6个支链与动平台的铰点均在Z轴方向有微小位移,由于支链的长度固定,所以支链和底座的铰点位置发生改变。由结果分析可知:动平台绕X轴转动0.03°时,在X方向的支链驱动分别为15.6 μm和13.7 μm,Y方向的支链驱动为6.1 μm。其平均位移(μm)为
由于驱动部件的定位精度优于0.2 μm,通过计算,动平台的转动运动精度(°)为
θ=0.2/8.95×0.03=0.000 67
而设计目标的精度为0.03°,因此,可以认为,动平台的旋转运动精度完全满足设定值。
3 结 论
1)构建了一种刚柔混合的柔性并联与动平台,为仿真分析提供了模型。
2)通过对柔性并联平台的仿真,可以得到该平台的位置精度和旋转精度,与设计要求的精度进行对比,结果发现满足设计要求,说明可以将刚柔混合的柔性并联运动平台应用于光电子封装制造的场合。
参考文献:
[1] 董 为.基于大行程柔性铰链的6自由度并联机器人系统的研究[D].哈尔滨:哈尔滨工业大学,2007.
[2] 齐立民.基于大行程柔性铰链的精密并联机器人研究[D].哈尔滨:哈尔滨工业大学,2009.
[3] Kuo S K,Menq C H.Modeling and control of a six-axis precision motion control stage[J].IEEE/ASME Transactions on Mechatronics,2005,10(1):50-59.
[4] Hatheway A E.Optomechanical and precision instrument design[C]∥SPIE Optomechanical Design and Precision Instruments,San Diego:SPIE, 1995:60-85.
[5] 阳 波.阵列波导器件的模场耦合与对准方法研究[D].长沙:中南大学,2013.
[6] Tseytlin Y.Note:Rotational compliance and instantaneous center of rotation in segmented and V-shaped notch hinges[J].Review of Scientific Instruments,2012,83(2):026102-1-026102-3.
[7] Vuilleumier A,Eigenmann M,Bergander A,et al.Development of a fine pointing and trim mechanism[C]∥The 14th ESMATS Constance,Germany,2011.
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
民用飞机设计与研究(2019年2期)2019-08-05 01:33:44
北京汽车(2019年6期)2019-02-12 05:19:50
汽车电器(2018年10期)2018-11-01 01:17:26
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37
实用手外科杂志(2015年2期)2015-08-28 09:50:56
饲料博览(2015年4期)2015-04-05 10:34:14
北京航空航天大学学报(2014年1期)2014-12-19 08:58:38