
改进的多尺度Retinex算法与人脸检测应用*
2018-06-05 01:54于凤芹
传感器与微系统 2018年6期
洪 杨, 于凤芹, 陈 莹
0 引 言
实际场合中进行人脸检测时,光照条件、拍摄设备成像质量、人脸与光源间的位置变化均会改变人脸像素信息,影响检测率。因此,需利用图像增强技术对人脸图像进行处理,增强细节信息,减少光照影响。当前的图像增强技术分为基于直方图均衡化[1]、基于Retinex算法[2,3]和基于雾化移除算法[4]三种。Retinex算法模拟人眼成像过程且能增强图像细节,广泛用于人脸图像处理。文献[5]使用自适应多尺度Retinex算法处理人脸图像,并通过不断迭代的方式获得了较好的照度图像,但具有放大噪声和迭代计算速度慢的缺陷,对此,文献[6]提出了基于变分框架的Retinex算法,并使用投影正规最快下降法计算照度图像,减少了迭代次数,但仍需要大量迭代计算;文献[7]采用了双边滤波器计算照度图像来避免迭代计算,算法复杂度为O(Nr2)(r为滤波窗口的半径,N为图像大小);文献[8]采用了导向滤波计算照度图像避免迭代计算,算法复杂度为O(N)。但当图像中噪声过大时,平滑参数较大的导向滤波所计算的照度图像将过于平滑,产生的估计误差影响了反射图像。针对噪声被放大的缺陷,文献[9]采用了基于空间变化的各尺度加权系数来抑制高对比度处的噪声,但未对较暗区域的噪声进行抑制。
为提高复杂场景下人脸图像的检测率,从减少多尺度Retinex算法计算时间和抑制较暗区域噪声放大出发,本文对多尺度Retinex算法进行了改进并用于人脸检测。改进后算法清晰提高了3.14 %,图像检测率提高了6 %。
1 多尺度Retinex算法基本原理及其改进
Retinex算法将图像S理解为照度图像L和反射图像R的乘积,通过计算L获得描述图像信息的R,并使用对数变换将乘法转化为加法,从而满足S=log(S)=log(L)+log(R)=l+r,但放大了较暗区域的噪声[7]。
为避免增强图像出现伪影,通常使用变分框架模型对照度图像进行计算且目标函数为
(1)
式中Dx和Dy分别为使照度图像光滑的水平和垂直处理算子。文献[7]指出由于照度图像的大小未知,因此,从图像S中计算照度图像L是个奇异问题。通常对照度图像进行初始估计后,使用多次迭代计算的方式对照度图像进行计算,当迭代次数较多时算法能较好地估计照度图像但计算速度慢。
单尺度Retinex算法无法在增强图像细节的同时保留颜色特性,因此,文献[10]引入了多尺度空间,多尺度下的照度图像表示为
(2)
式中wn为加权系数,一般为1/N,N为尺度个数,n为当前尺度;Fn(x,y)为中心环绕函数。反射图像表示为

Fn(x,y)]}
(3)
最终增强图像表示为S′=L′+R′。
1.1 基于快速导向滤波的照度图像计算
为加快多尺度Retinex算法计算速度,使用快速导向滤波计算照度图像,从而将式(1)的多次迭代运算转为一次雅可比迭代。
快速导向滤波以导向滤波为基础且有良好的细节增强能力和边缘保持能力[11],包括导向图I、滤波输入p以及滤波输出q。对导向图和滤波输入进行采样频率为z,z>1,的下采样以加快计算速度,使用快速导向滤波计算照度图像的复杂度为O(N/z2)。滤波输出只依赖于导向图对应位置的处理窗口,滤波输出可以表示为
q(x,y)=∑Wij(I)*p(x,y)
(4)
式中Wij为滤波核函数。使用快速导向滤波计算式(1),目标函数变为
(5)


(6)
文献[11]指出仅需一次雅克比迭代便可以对式(6)进行求解,从而避免照度图像计算时的多次迭代。采样频率z较大时,其计算复杂度要低于直方图均衡复杂度O(G),具有实时性,其中,G为图像的灰度级数。
1.2 基于亮度信息的多尺度加权系数
为抑制较暗区域噪声,通过分析图像的亮度信息找到较暗区域,并降低该区域多尺度加权系数抑制噪声。
改进的多尺度Retinex加权系数为
gn(x,y)=
(7)


图1 gn与Nlightn变化曲线比较
由图1(a)可知:相比常系数增益,gn在较暗区域和较亮区域处值低于常系数增益,能对较暗区域和较亮区域的噪声进行抑制; 由图1(b)知:相较于描述图像背景轮廓信息的大尺度图像,描述图像细节信息的小尺度图像的gn值更大,更好地描述了人脸细节信息。
1.3 基于快速导向滤波的反射图像平滑
为减少照度图像的估计误差,使用快速导向滤波平滑反射图像。仿真实验中发现当图像噪声较大时,增强图像中的噪声将增加。这是由于当噪声较大时,使用快速导向滤波估计的照度图像将会过度平滑。由S=l+r可知得到的反射图像中除包含图像中原有的噪声外还将引入因照度图像过度平滑产生的估计误差[1],因此,使用快速导向滤波对反射图像进行平滑,消除照度图像的估计误差,则目标函数可以变为

(8)
式中ε1(c)和ε2(c)为快速导向滤波的平滑参数,较小的平滑参数能保留图像的细节信息,较大的平滑参数能保留图像轮廓信息;c为图像的清晰度反映了图像的清晰程度,清晰度越大图像越清晰,噪声越少,表达式为
(9)
式中m和n为图像像素大小;ΔIx和ΔIy为像素点在水平和垂直方向的差分。ε1(c),ε1(c)与c的关系为
(10)
式(8)中第二项作用为使反射图像光滑,由S=l+r可知:照度图像与反射图像不能同时平滑。当c较低时图像噪声大,使用较小的ε1(c)计算照度图像以防止其过度平滑并使用较大的ε2(c)平滑反射图像消除估计误差;当c较高时图像噪声小,使用较高的ε1(c)计算照度图像并使用较小的平滑参数ε2(c)处理反射图像来保留细节信息。为加快多尺度图像的计算速度,只计算尺度为15,80,250的图像。改进的照度图像、反射图像和增强图像分别为
(11)
(12)
S″(x,y)=L″(x,y)+qn,ε2(c)(x,y)*R″(x,y)
(13)
2 算法实现步骤
改进的多尺度Retinex算法并用于人脸检测流程如图2所示。
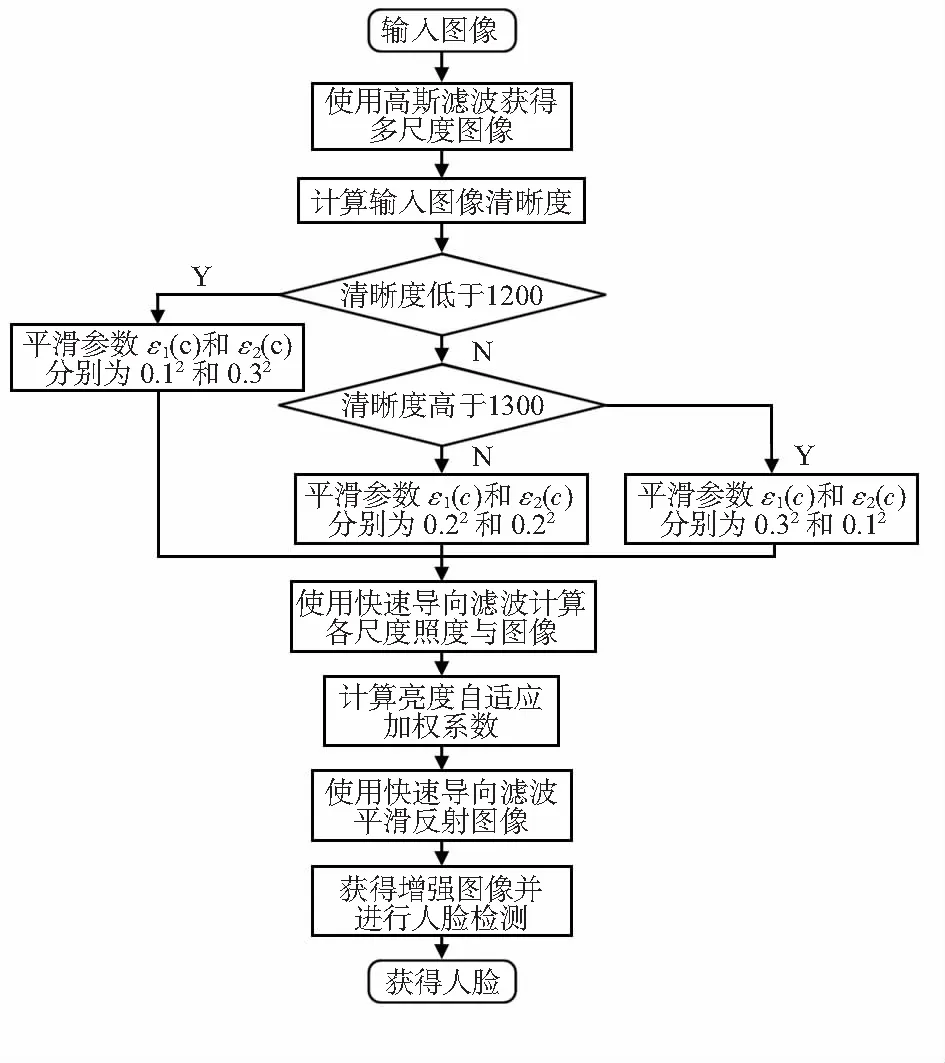
图2 改进的多尺度Retinex算法并用于人脸检测流程
3 仿真实验结果与分析
为评价改进的人脸图像增强的性能,分别选取了FEI人脸数据集、人脸检测数据集(face detection database,FDDB)[13]和公共场所监控图像进行仿真实验。FEI人脸数据集涵盖了200人在不同的光照、姿态和角度下共2 800张图片。FDDB人脸数据集是标准化的数据集,提供了2 845张图片,共计5 171张人脸,涵盖了自然环境下的各种光照条件和非聚焦情况下的人脸。同时,为证明改进的算法在实际场景中的有效性,选取包括商场入口、楼道口、停车场等处的监控图像,包括光照过亮和过暗等情况。
由于各图像原始信息不同,采用了熵的平均增量、方差的平均增量、均值的平均增量和清晰度的平均增量作为评价指标,并与文献[1,2,5~7]算法进行比较得到表1。其中方差反映图像的对比度,方差越大灰度分布越分散,对比度越大;熵反映图像的信息量,熵越大图像信息越多;均值反映了图像的明暗程度,均值适中,图像增强效果最好;清晰度反映图像的清晰程度,清晰度越大,图像越清晰,噪声越少。
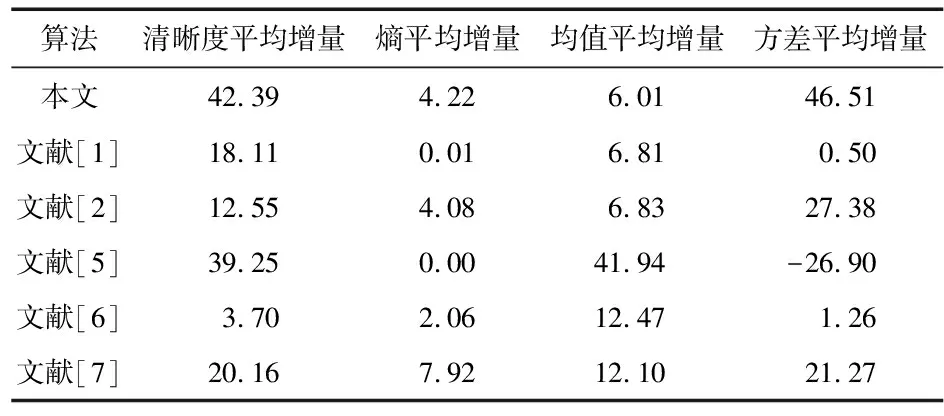
表1 不同图像增强算法在FEI数据集上的比较 %
由表1可知:改进的算法清晰度平均取得了42.39 %的提升,相比文献[1,5,7]分别提升了24.28 %,3.14 %和22.23 %,说明改进算法能有效降低图像的噪声;改进算法熵平均提升了4.22 %,相比文献[1,5,6]分别提升了4.21 %,4.21 %和2.16 %,说明改进算法能有效提高图像的信息量;改进算法均值提升了6.01 %,提升幅度适中;改进算法方差平均提升了46.51 %,相比文献[1,6,7]分别提升了46.01 %,45.25 %和25.24 %,说明改进算法能够有效提高图像的对比度。
为评价改进的算法的计算速度,选取FEI人脸数据集,以计算时间为评价指标获得处理图像数量与计算时间的关系,并与文献[1,2,6,7]算法进行了比较得到图3。
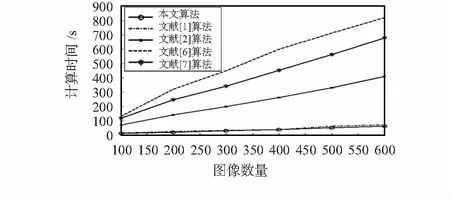
图3 不同图像增强算法计算时间比较
由图3知:本算法的计算时间随着处理图像数量的增加而线性增加,计算时间低于文献[1,2,6,7]的计算时间。当快速导向滤波的采样频率Z>5时其计算速度高于文献[1]算法,具有实时性。
为评价算法对分辨率低且光照较暗图像的增强性能,使用改进的算法对实际环境的视频监控图像进行增强并进行人脸检测,并与文献[5,7]进行了比较,获得图4。

图4 不同增强算法在人脸检测中的性能比较
图4(a)为监控中截取的图像,其分辨率较低致使人脸信息模糊且存在人脸阴影。图4(b)为改进的算法处理后的图像,发现原图中较暗区域的人脸细节得到了增强,其效果优于图4(c)和图4(d)使用多尺度Retinex算法处理和使用双边滤波处理后的图像。由图4(d)可知:使用双边滤波处理图像时,在光照变化强烈处产生梯度反转伪影。同时由于双边滤波易忽略图像的细节信息,增强后的图像细节较为模糊[14],改进的多尺度Retinex算法增强后的图像在人脸检测中具有更好的性能。
为评价改进的算法对亮度过亮图像人脸增强性能,使用算法对实际环境中过亮图像进行增强并进行人脸检测,并与文献[5,7]进行比较,获得图5。

图5 不同算法处理高亮图像后的人脸检测比较
图5(a)图像在人脸处存在亮度过高部分,使用改进算法能抑制图像中的高亮部分并提高对比度,且增强后的图像用于人脸检测具有更好的性能。
为评价改进算法在人脸检测中的有效性,选取FDDB人脸数据集进行图像增强并使用AdaBoost算法进行人脸检测。AdaBoost算法因其优异的性能广泛用于人脸检测[15],仿真实验以检测率和漏检率作为指标并与文献[1,5~7]算法进行比较,得到表2。

表2 不同图像增强算法在人脸检测中的性能比较 %
由表2可知:使用改进算法处理过的图像进行人脸检测能提高检测率,相比文献[1,5~7]算法分别提高了5 %,6 %,11 %和4 %;改进算法处理后的图像进行人脸检测能降低误检率,相比文献[1,5~7]算法分别降低了7 %,4 %,6 %,9 %,说明使用改进算法处理后的图像更适合进行人脸检测。
4 结 论
提出了改进的多尺度Retinex算法并用于人脸检测。仿真实验表明:改进算法能有效提高多尺度Retinex算法的计算速度,处理后的人脸图像噪声更少,在人脸检测中具有更高的检测率。
参考文献:
[1] Lee P H,Wu S W,Hung Y P.Illumination compensation using oriented local histogram equalization and its application to face recognition[J].IEEE Transactions on Image processing,2012,21(9):4280-4289.
[2] Wang L,Xiao L,Liu H,et al.Variational bayesian method for Retinex[J].IEEE Transactions on Image Processing,2014,23(8):3381-3396.
[3] Mario D G,Ponomaryov V,Kravchenko V.Cromaticity improvement in images with poor lighting using the Multiscale-Retinex MSR algorithm[C]∥2016 9th International Kharkiv Symposium on Physics and Engineering of Microwaves,Millimeter and Submillimeter Waves (MSMW),IEEE,2016:1-4.
[4] Xiao C,Gan J.Fast image dehazing using guided joint bilateral filter[J].The Visual Computer,2012,28(6-8):713-721.
[5] Jiang B,Woodell G A,Jobson D J.Novel multi-scale retinex with color restoration on graphics processing unit[J].Journal of Real-Time Image Processing,2015,10(2):239-253.
[6] Kimmel R,Elad M,Shaked D,et al.A variational framework for retinex[J].International Journal of Computer Vision,2003,52(1):7-23.
[7] Elad M. Retinex by two bilateral filters[C]∥International Conference on Scale-Space Theories in Computer Vision,Berlin Heidelberg:Springer,2005:217-229.
[8] Ahn H,Keum B,Kim D,et al.Adaptive local tone mapping based on retinex for high dynamic range images[C]∥2013 IEEE International Conference on Consumer Electronics (ICCE),IEEE,2013:153-156.
[9] Jang J H,Choi B,Kim S D,et al.Sub-band decomposed multiscale retinex with space varying gain[C]∥2008 15th IEEE International Conference on Image Processing,IEEE,2008:3168-3171.
[10] Rahman Z,Jobson D J,Woodell G A.Multi-scale retinex for color image enhancement[C]∥1996 Proceedings of International Conference on Image Processing,IEEE,1996:1003-1006.
[11] 许鹏飞.基于Guide-filter的中国书法作品中印章信息的提取[J].传感器与微系统,2016,35(12):125-128.
[12] 沈 丰,赵宇明.基于实时 Retinex 与双边滤波的图像增强算法[J].计算机应用与软件,2009,26(11):234-238.
[13] Jain V,Learned-Miller E.FDDB:A benchmark for face detection in unconstrained settings[R].Amherst:University of Massa-chusetts.http:∥vis-www.cs.umass.edu/fddb/index.html#download.UM-CS-2010-009,2010.
[14] 韩 震,王红斌,余正涛,等.双边非局部均值滤波图像去噪算法[J].传感器与微系统,2016,35(6):124-127.
[15] 徐 前,赵德安,赵建波.基于改进的AdaBoost算法的人脸检测与定位[J].传感器与微系统,2010,29 (1):94-97.
猜你喜欢
少儿美术·书法版(2021年9期)2021-10-20
小学生必读(低年级版)(2021年5期)2021-08-14
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
光源与照明(2019年4期)2019-05-20
动漫星空(2018年9期)2018-10-26
照明工程学报(2017年3期)2017-07-10
太空探索(2016年5期)2016-07-12
时代英语·高三(2014年5期)2014-08-26
奇闻怪事(2014年5期)2014-05-13
雕塑(2000年2期)2000-06-22
