基于随机游走的自动图像分割算法*
2018-06-05 01:54:08茅正冲
传感器与微系统 2018年6期
茅正冲, 韩 毅
0 引 言
近年来,基于图论的图像分割算法成为研究的热点,应用图论进行图像处理具有直观、速度快、效率高等诸多优点。依据用户参与与否,图像分割可分为交互式图像分割和自动图像分割。Boykkov Y等人[1]提出了Graph Cut算法,结合了图像的区域信息和边界信息,目前已成为广泛使用的交互分割方法。Grady L等人[2]率先将随机游走模型应用到图像分割中,计算速度快,可很好地检测弱边缘,并且对噪声有较强的鲁棒性,但需要用户标记标记点,是一种半自动分割算法。
郭丽等人[3]利用背景差分实现了自动识别目标区域,通过形态学方法求得骨架结构,从中获取标记点,再采用随机游走算法进行自动图像分割,在多车辆检测领域解决了交互分割速度慢的问题;但对背景建模时,背景的更新是一个难点。李昌兴等人[4]引入了加速均值算法,提出了一种加速谱聚类的图像分割算法。Qin C C等人[5]对图像进行超像素分割,使用近邻传播聚类算法求取超像素区域中心点,通过固定阈值对中心点标记,自动地为随机游走算法标定标记点。文献[6]中采用模式挖掘算法选取标记点,在显著性提取中取得了不错的效果。
本文提出了一种结合显著性,模式挖掘算法和随机游走的自动分割算法,通过计算图像的显著性图,初步确定感兴趣目标的区域;通过模式挖掘算法为随机游走初步选取标记点,结合位置信息进一步筛选标记点;使用随机游走算法对输入图像进行分割。实验结果表明:本文方法可以自动对图像进行较精确地分割。
1 随机游走算法
根据图像构成加权图G(V,E),图中任意顶点v∈V视为图像中的一个像素点或者超像素块,将顶点分作VM和VU2个集合,VM表示已标记点的集合,VU表示未标记点的集合,任意一个边e∈E⊆V×V视为两个相邻像素之间的关系,边的权值w视为像素之间的相似或差异性度量
di=∑wij
(1)
式中di为顶点vi的度,表示所有与顶点vi连接的边的权重之和。
根据顶点、边以及权重可以构建图的Laplace矩阵L,将顶点分为VM和VU后,Laplace矩阵表示为
(2)
随机游走的求解过程可以转化为求解Dirichlet问题[7],即寻求一个满足边界条件的调和函数u(x,y),使得Dirichlet积分达到最小值,Dirichlet积分为

(3)
(4)

由以上分析可知,随机游走算法进行图像分割的数学理论完整,度量特征选取合适,可以对图像进行完全地分割,但该算法要求用户指定标记点,限制了其在自动图像分割中的应用。
2 显著性检测
为了实现随机游走算法自动分割,本文通过视觉显著性初步确定目标区域。Sun J G[7]等人提出了一种基于马尔科夫吸收概率的(Markov absorption probability,MAP)显著性检测算法,对于一个给定的状态集S={s1,s2,…,sl},pij表示状态si转移到状态sj的概率,马尔科夫过程表示为转移矩阵P。给定k个吸收节点,m个暂态的马尔科夫链,转移矩阵P为

(5)
式中Q∈[0,1]mm为暂态之间的概率转移矩阵;R∈[0,1]mk为暂态与吸收状态之间的转移概率;I为k×k的单位矩阵。可得基础矩阵N,N的元素nij表示暂态si转移到暂态sj的估计转移次数
N=(I-Q)-1=I+Q+Q2+…
(6)
马尔科夫链中每个暂态si都将独立地转移至吸收状态sj,吸收概率矩阵为
B=NR
(7)
式中B的每个元素bij表示暂态si到吸收状态sj的概率。
3 模式挖掘算法
文献[6]提出了通过模式挖掘算法选取标记点。给定一个有M项的集合I={i1,i2,…,iM},交易集T为I的子集,交易数据库D={T1,T2,…,TN}由N个不同的交易集组成。集合A由交易集T∈D中部分元素组成,且满足A⊆I,A的支持度定义为
(8)
当supp(A)大于固定的阈值tmin时,集合A称为频繁项集。
关联规则A→p描述A和p同时出现的可能性,关联规则强度可以用支持度和自信度描述,关联支持度、自行度分别定义为
supp(A→p)=supp(A∪{p})
(9)
(10)
支持度和自信度越高,关联规则越强,二者相关性越强。
4 基于随机游走的自动图像分割
4.1 显著性确定目标区域
为了选择一种更有效的显著性提取方法,本文使用若干常见算法求取显著性图,结果如图1所示,图中依次采用的CA[8],SR[9],MSS[10],FASA[11],MAP[7]算法。由实验结果分析可知:CA和SR得到的显著图中目标外轮廓较清晰,但内部信息未很好地显示,MSS和FASA算法部分对背景的抑制能力相对较弱,而基于马尔科夫链的MAP算法提取显著图目标鲜明,对背景抑制较好,本文根据显著图进行目标的初步定位,采用基于马尔科夫链的MAP算法确定目标区域。
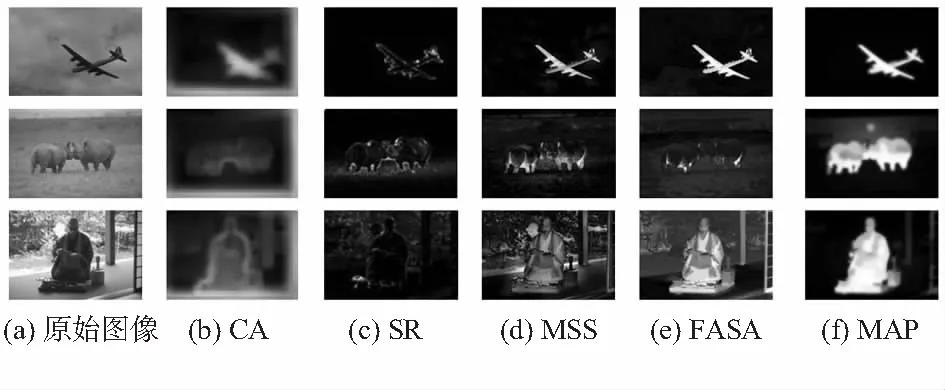
图1 不同算法显著性检测结果
4.2 基于模式挖掘的标记点确定
基于模式挖掘算法确定的标记点如图2所示。首先对给定的图像进行超像素分割,通过显著图确定目标区域,将显著区域的像素块标记为正样本,显著区域外的像素块标记为负样本,采用模式挖掘算法确定和正样本相关的超像素块。具体流程如下:
1)采用SLIC[12]算法在三个尺度对图像进行超像素分割,得到一个超像素集S={s1,s2,…,sN},结合显著图,当每个超像素块在显著图中对应区域亮度值大于一定阈值时,该像素块认定为正样本;否则,认定为负样本。
2)对每个超像素块进行K均值聚类,计算其聚类中心在整幅图像中的索引,表示超像素块的全局位置信息。
3)将包含样本标签和全局位置信息的超像素输入到Apriori频繁项挖掘算法中,得到显著性的频繁超像素集。
4)对相同尺度的超像素和频繁超像素集进行关联规则分析,求取显著的超像素,并将其中心认定为标记点。
结合上述流程,部分初步提取的标记点如图2(b)所示,分析可知,通过模式挖掘算法求得的标记点较丰富,标记点也聚集在目标区域,部分标记点位于目标周围。为了进一步地将标记点分为前景标记点和背景标记点,本文对标记点的位置进行分析,将显著目标内部的标记点判定为前景标记点,外部的标记点判定为背景标记点,处理后的结果如图2(c)所示。
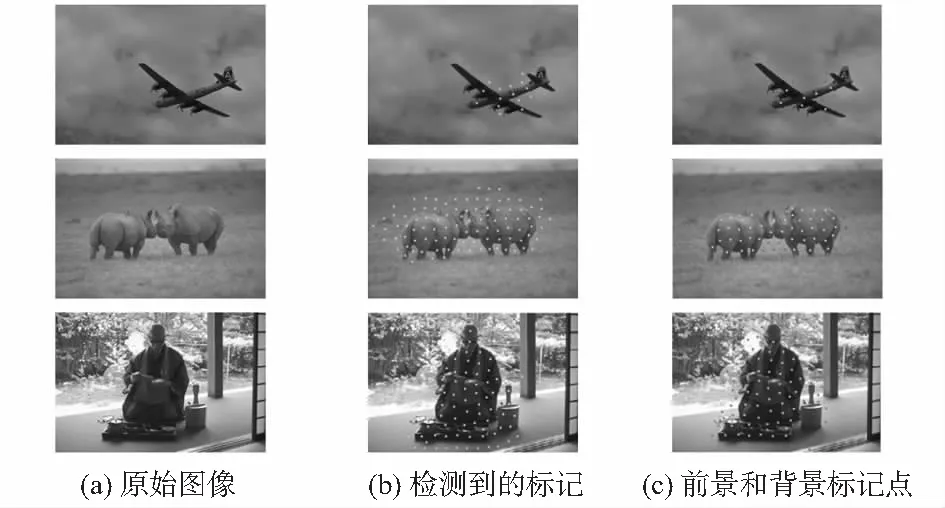
图2 模式挖掘算法确定的标记点
4.3 随机游走算法图像分割
本文结合显著图和模式挖掘算法,自动提取标记点,融合显著性特征进一步将标记点分为前景标记点和背景标记点两类,最终使用随机游走算法对图像进行分割,整体流程如图3所示。
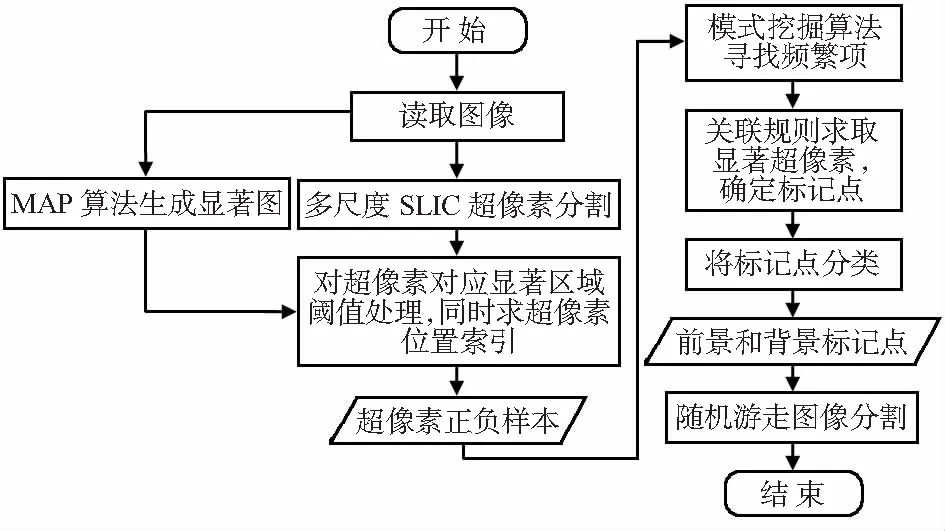
图3 自动图像分割算法流程
5 实验与结果分析
为了验证本文算法的有效性,选取若干样本进行仿真实验,数据来自Berkeley数据集。作为实验对比,使用人工给定标记点,经典随机游走算法进行图像分割,同时采用Grab Cut算法对样本进行交互分割,本文提出的随机游走进行自动分割,对比结果如图4所示。
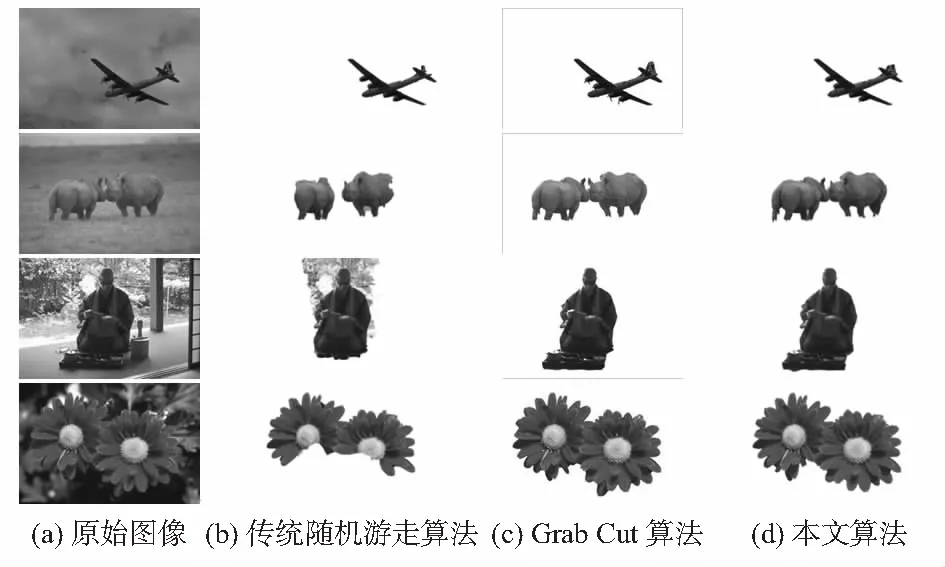
图4 图像分割结果对比
由图4(b)可以观察到,传统的随机游走算法的图像分割结果依赖于人工给定的标记点,在标记点不很充分的情况下容易出现过分割和欠分割现象。分析图4(d)可知,本文算法取得了良好的检测结果,基于模式挖掘算法选取的标记点数量丰富,对背景抑制能力较强,分割的目标轮廓清晰,为图像的后续处理奠定了良好的基础。将结果与图4(c)Grab Cut算法迭代分割结果进行对比,在背景不是特别复杂的情况下,本文算法的分割结果接近交互分割,可以注意到Grab Cut处理后图像轮廓更完整,本文算法有少量边界出现了过分割现象,如飞机的后部机翼和犀牛的牛角部分,但本文算法可以无需用户参与自动地完成图像分割。
为了进一步说明算法的有效性,提取分割结果边界与图像标准轮廓进行对比,采用正确率(P)、召回率(R)以及F值量化评价实验结果。P表征检测点为真正的轮廓的概率;R表征检测检测点的数量比例;F=2×P×R/(P+R)为准确率和召回率的调和评价,反映整体效果。部分实验样本的评价结果平均值如图5所示。
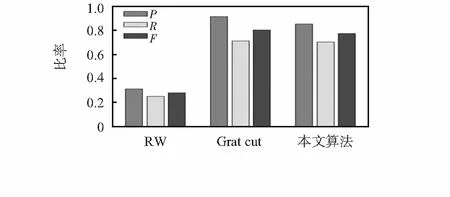
图5 3种算法仿真数值评价结果
由数值可以看出,相较于传统随机游走分割算法,本文算法分割的结果在正确率和召回率方面均具有明显的提升,图像分割质量较好,但与Grab Cut算法相比,分割结果表现略微欠佳。在要求精细分割的应用中,更好的选择是交互分割方法,但在自动图像检测和批量处理图像时,本文算法分割效果良好,具有一定的优势。
6 结 论
为了实现自动图像分割,重点研究了显著性提取、模式挖掘算法以及随机游走算法。采用模式挖掘算法进行初步确定标记点,进一步结合显著图将标记点分类为前景和背景标记点,算法自动地为随机游走提供标记点;应用显著图和模式挖掘算法确定标记点,随机游走算法最终实现图像分割,效果较好,且分割过程不需用户指定区域。实验结果表明:本文方法处理效果较好,具有一定的应用研究价值。
参考文献:
[1] Boykov Y,Veksler O,Zabih R.Fast approximate energy minimization via graph cuts[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2001,23(11):1222-1239.
[2] Grady L.Random walks for image segmentation[J].IEEE Tran-sactions on Pattern Analysis and Machine Intelligence,2006,28(11):1768-1783.
[3] 郭 丽,高立群,刘 濛,等.一种新的随机游走多车辆检测算法[J].中国图象图形学报,2010(3):392-396.
[4] 李昌兴,黄艳虎,支晓斌,等.基于加速k均值的谱聚类图像分割算法改进[J].传感器与微系统,2016,35(9):137-140.
[5] Qin C C,Zhang G P,Zhou Y C,et al.Integration of the saliency-based seed extraction and random walks for image segmentation[J].Neuro Computing,2014,129:378-391.
[6] Kong Y Q,Wang L J,Liu X P,et al.Pattern Mining Saliency[C]∥ECCV,2016.
[7] Sun J G,Lu H C,Liu X P.Saliency region detection based on Markov absorption probabilities[J].IEEE Transaction on Image Processing,2015,24(5):1639-1649.
[8] Goferman S,Zelnik-Manor L,Tal A.Context-aware saliency detection[C]∥Computer Vision and Pattern Recognition,2010:2376-2383.
[9] Hou X,Zhang L.Saliency detection.A spectral residual approa-ch[C]∥IEEE Conference on Computer Vision and Pattern Recognition,2007:1-8.
[10] Radhakrishna Achanta,Sabine Susstrunk.Saliency detection using maximum symmetric surround[C]∥International Conference on Image Processing(ICIP),Hong Kong,2010.
[11] Yildirim G,Süsstrunk S.FASA:Fast,accurate,and size-aware salient object detection[C]∥Asian Conferenceon Computer Vision,ACCV 2014,2014:514-528.
[12] Achanta Radhakrishna,Shaji Appu,Smith Kevin,et al.SLIC superpixels compared to state-of-the-art superpixel methods[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2012,34(11):2274-2282.
猜你喜欢
艺术家(2023年8期)2023-11-02 02:05:28
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:30
大电机技术(2021年5期)2021-11-04 08:58:28
红领巾·萌芽(2019年8期)2019-08-27 15:30:15
电子制作(2019年24期)2019-02-23 13:22:26
西南交通大学学报(2018年5期)2018-11-08 10:58:04
电子制作(2018年14期)2018-08-21 01:38:28
电子测试(2017年23期)2017-04-04 05:07:02
苏州科技大学学报(自然科学版)(2017年1期)2017-03-20 15:25:20
知识产权(2016年8期)2016-12-01 07:01:32