基于均匀空间色差度量的彩色图像椒盐噪声滤波算法*
2018-06-05 01:54:10王文哲许圣雷
传感器与微系统 2018年6期
刘 辉, 王文哲, 许圣雷
0 引 言
在图像采集、传输和记录的过程中不可避免受到噪声干扰[1]。随着计算机视觉等学科的迅猛发展,彩色图像的去噪成为了当前研究的热点。文献[2]针对彩色图像椒盐噪声滤除中保护色彩和细节的关键问题,提出了一种基于噪声估计和双加权的滤波新算法,当噪声密度较高时算法处理效果不够理想而且算法时间复杂度较高。文献[3]提出区域差异性测度(difference measurement,DM),优化了DM的2个主要参数,并以此为基础提出了DM选点矢量中值滤波(DMNVM),但当图像内像素点色差变化较大时噪声点的检测不够精确。文献[4]提出了一种基于排序统计的矢量中值滤波器,在小窗口运行速度等方面取得了较标准中值滤波更好的效果,但滤波窗口的变化对时间的复杂度影响较高。文献[5,6]分别提出了一种稀疏约束方法和变分方法,在图像细节保护上取得了一定的效果,但是在工程应用方面比较复杂。2006年Kostadin Dabov等人[7]提出了三维块匹配(3D block matching,3D BM)算法,能够取得较为出色的峰值信噪比,但图像块的滑动匹配以及二维、三维空间的连续转换使得其时间复杂度较高。
为了更好地贴合人眼对色彩的识别方式,本文提出了一种基于人眼对色彩判断能力的矢量排序算法。在Lab空间下,像素点之间的欧几里得距离与实际色差成正比,据此建立矢量排序,依据排序结果利用中值滤波方法进行去噪。
1 彩色图像均匀空间转换
1.1 Lab彩色空间
Lab色彩空间由3个通道组成,L∈[0,100]代表亮度指数,a,b∈[-128~127]代表色彩指数。
1.2 转换图像到Lab空间
图像由RGB空间转换到Lab需要先转换到CIE1931XYZ色彩空间。XYZ空间任一分量与RGB空间每个通道均是线性映射的。二者的转换方式可以表示为[8]
(1)
再由CIE1976均匀颜色空间到Lab换算,公式如下[9]
(2)
(3)
(4)
式中X0,Y0,Z0为标准光源的3个刺激值,值分别为:X0=95.045,Y0=100,Z0=108.255。通过式(1)~式(4)可将RGB图像转换到Lab空间下。
2 均匀空间下的图像中值滤波算法
2.1 均匀空间的矢量排序
设均匀彩色空间I内任意2个不同像素点P(iP,jP)和Q(iQ,jQ)之间像素值的距离由向量范数DPQCQ-CP确定[10,11]。
在均匀空间中进行矢量排序时应区别出每个向量点的不同,而非每2个色彩向量之间的不同,选择固定参考点的方法。为区别P(iP,jP)和Q(iQ,jQ)各自的不同,选取参考点S,对比DSPS-CP和DSQ=S-CQ大小的不同即可区别出两者不同,利用该方法区别整个滤波窗口每个像素点之间的不同。
2.2 均匀空间下图像中值滤波算法
矢量中值滤波是以图像的一个完整的像素为单位进行滤波,原理为选取每个窗口中离参考像素点的欧氏距离中值的像素点替代窗口中心像素点,像素点整体处理,不会引入其他色彩。
在由RGB转换到Lab空间后的图像中选取3×3的滤波窗口,窗口的中心点为(L(i,j),a(i,j),b(i,j)),在RGB空间中加入的椒盐噪声使得图片的每一个像素点的单一分量等可能受到脉冲信号的干扰,在被污染后,每个像素点与RGB空间下全黑(0,0,0),全白(255,255,255)点的欧氏距离可以确定,由式(1)~式(4)转换到均匀空间下的向量对应为(0,0,0)和(100,0.131 7,-0.545 8),由Lab空间下的所有像素点与参考点的欧氏距离能够反映两者之间的色彩差异,经过反复的实验对比后选用全黑点为参考点效果更佳而且时间复杂度也更为优异。点L(i,j),a(i,j),b(i,j)与选定参考点的欧氏距离为
(5)
由式(5)和图1可以看出:当图像的某一个或者几个信号分量被污染,图像的像素点与选定参考点的欧式距离会变得很小或者很大,即其与选定参考点的色差很大,而通常情况下某一个像素点周围的点与其的色彩差别很小,即其周围的点与选定参考点的欧几里得距离差别较小,故经过排序后,被污染的点所对应的欧氏距离会位于序列的开始或者结尾部分,而真正能够反映滤波窗口色彩特征的点则会排在序列的中部,选择序列中间的点来替代滤波窗口的中心点。按照算法依次推理,滤波后的每一个点均被其所在滤波单元区域最能表达该区域色彩特征的点所替代的,算法能够实现滤波。

图1 均匀空间下矢量排序
椒盐噪声为脉冲信号,使得被污染的噪声与周围像素点产生较大的色差,算法在处理图像的椒盐噪声时取得了很好的效果,在处理过声中,一直寻找能够代表滤波窗口区域内最能代表该区域色彩特征像素点的位置,最后使用位于该位置的像素点替换滤波窗口中心的像素点,经过处理后整幅图像的所有像素点都是在原图像中存在的,因此,算法的优点就是不会引入其他色彩,最大程度保留了原图像的图像特征。算法流程如图2所示。

图2 算法流程
具体算法步骤如下:
1)算法初始化,读取图像;
2)将图像由RGB空间转换到均匀空间Lab空间下;
3)在Lab空间下选取3×3的滤波窗口,计算窗口内每个点与Lab空间下参考点(0,0,0)的欧氏距离;
4)对步骤(3)取得结果建立非减或者非增排列,选择位于序列第5位的欧氏距离并取得所对应的Lab空间内像素点的位置;
5)在RGB空间内获取与步骤(4)结果同一位置的像素点,用该像素点替换位于该窗口中心的像素点,完成了一个滤波单元;
6)重复步骤(2)~步骤(5),使得整幅图像中除边界外的每个点均会作为一个滤波窗口的中心点进行处理,直至完成对整幅图像的处理。
3 实验与对比分析
选择经典的Lenna(24 bit RGB,512像素×512像素)图像作为实验对象,分别对其加入5 %~15 %的椒盐噪声,并且认为每个像素点受到污染的概率相同。分别采用传统矢量滤波器(VMF)和HSV的方法与本文方法进行对比。计算机的配置:主频2.7 GHz,内存4 GB。
3.1 实验数据与结果
为了验证本文算法的滤波效果,选择峰值信噪比(peak signal-to-noise ratio,PNSR)[12]和结构相似性(structural similarity index,SSIM)作为评价准则与参照算法进行对比[13]。2种指标定义如下:
1)PNSR越大滤波效果越好
式中f(i,j)为原始图像各像素点的灰度值;g(i,j)为完成处理后图像像素点的灰度值;M×N为图像的尺寸;lg为以10为底的对数;L为图像的灰度级(取255)。
2)SSIM值越大说明与源图像相比更为近似
(7)
式中ux,uy为x,y的均值;σx和σy分别为x,y的标准差;σxy为协方差;C1,C2,C3为常数。
3.2 结果分析
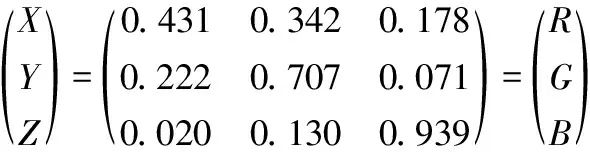
表1和图3表明随着噪声密度的增大,各方法的PNSR均减小,在同等条件下,本文方法的PNSR均大于VMF和自适应矢量中值滤波器(adaptive vector median filter,AVMF)空间下矢量滤波方法。表2表明在中低密度噪声情况下本文提出算法具有较为明显的优势。
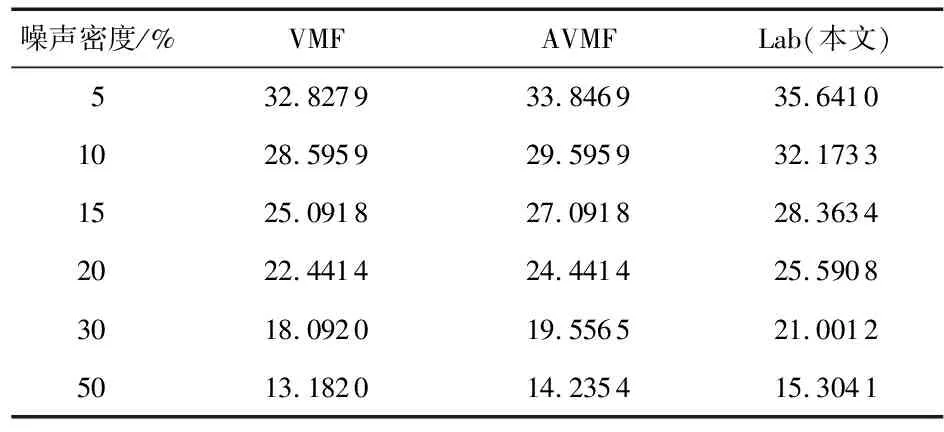
表1 采用不同滤波方法的PSNR结果

图3 PNSR对比曲线

噪声密度/%VMFAVMFLab(本文)50.93610.95020.9573100.82370.84500.8577150.63830.67920.6840200.49980.51590.5223300.29870.30810.2796500.11130.12210.1071
从图3中可以看出,在噪声密度为5 %时,AVMF的处理效果跟本文方法几近相似,但当噪声密度达到10 %~20 %时,滤波后的显示效果方面本文方法具有较好的优势。在色彩信息保持对比方面,选择了同样是工程应用较为广泛的BVDF算法,如图4~图6所示,在噪声分别为5 %,10 %,15 % 时,Lab空间下本文(矢量滤波)方法在色彩保持方面较BVDF均能取得出色的效果。

图4 5 %噪声3×3窗口下各去噪方法滤波效果
图5 10 %噪声3×3窗口下各去噪方法滤波效果
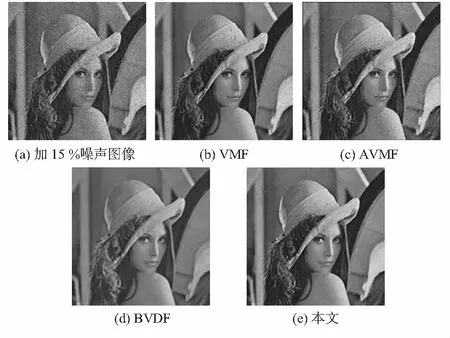
图6 15 %噪声3×3窗口各方法滤波效果对比
为了更好地比较3种方法,应用常见的定量描述滤波效果的方法衡量三者之间性能,采用PSNR和与主观评价关联性较高的质量评价方法SSIM作为判评标准。实验结果表明:在低密度噪声时,本文方法的指标均优于AVMF和VMF,证明了方法的有效性。
同时为了验证所选取参考点的优越性,如表3所示,点(100,0.1317,-0.5458)和(0,0,0) 分别为RGB空间下全白(255,255,255)和全黑点(0,0,0)所对应的在Lab空间里的点,点(100,127,127)和(0,-128,-128)为Lab空间内最大和最小的点。选取一个合适的参考点是一个不断试凑的过程,而这些点则最能代表这两个空间的极端,故图像中点与这些点的差异最大,在以色差度量为关键的算法中这些点的选取会取得比较好的效果。表3中数据证明选用点(0,0,0)能够达到相对最优的效果。
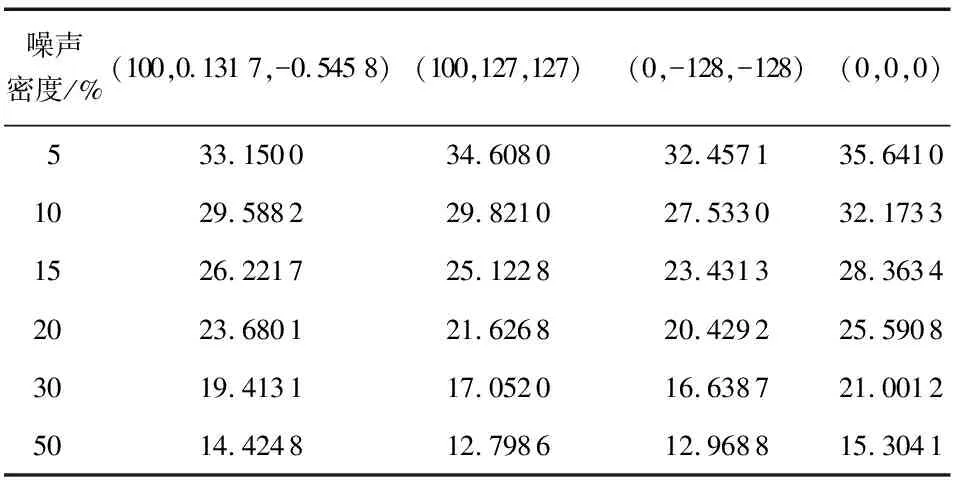
表3 不同参考点的PSNR对比
4 结 论
1)本文算法将传统色彩空间里的图像处理方法推广到均匀空间应用。不仅验证了算法的有效性又为以后的研究提供了一种借鉴。
2)与同类算法相比,算法不仅实现了噪声的有效削弱,还在色彩保持方面取得一定的效果。
3)较低的时间复杂度,使得算法为以后的实时性应用研究奠定了很好的基础。
算法的研究能为去除彩色图像椒盐噪声提供一种新的思路,具有人眼色差识别的一致性以及较高的运算实时性,能为基于嵌入式的图像滤波应用提供理论基础,具有较好的实用价值和应用前景。
参考文献:
[1] 李 刚,魏计林.强椒盐噪声彩色图像的改进矢量中值滤波算法[J].计算机与数字工程,2011,39(10):157-160.
[2] 刘松涛,马林坡,殷福亮.基于噪声估计和双加权的彩色图像矢量中值滤波[J].光子·激光,2011,22(1):131-135.
[3] 邵承会,唐可洪,朱黎辉.区域差异性测度选点向量中值滤波[J].光电子·激光,2007,18(12):1449-1452.
[4] Astola J,Haavisto P,Neuvo Y.Vector median filters[J].Proceedings of the IEEE,1990,78(4):678-689.
[5] Chen S,Yang X,Cao G.Impulse noise suppression with an augmentation of ordered difference noise detector and an adaptive variational method[J].Pattern Recognition,2009,30(4):460-467.
[6] Wang S S,Wu C H.A new impulse detection and filtering method for removal of wide range impulse noises[J].Pattern Recognition,2009,42(9):2194-2202.
[7] Dabov K,Foi A,Katkovnik V,et al.Image denoising with block-matching and 3D filtering[C]∥Electronic Imaging 2006,International Society for Optics and Photonics,2006,606414-11-606414-12.
[8] 刘 辉,张云生,张印辉,等.均匀空间色差度量的矢量形态学图像处理[J].中国图象图形学报,2011,16(12):2154-2151.
[9] 钟克洪,丁明跃,周成平,等.基于均匀空间的颜色分级方法[J].中国图象图形学报,2004,9(11):1277-1283.
[10] Smolka B.Adaptive truncated vector median filter[C]∥International Conference on Computer Science and Automation Engineering(CSAE),2011:261-266.
[11] Xu Shaoping.An improved switching vector median filter for image-based haptic texture generation[C]∥Image and Signal Processing (CISP),2012,5(10):1195-1199.
[12] 张旭明,徐滨士,董世运.用于图像处理的自适应中值滤波[J].计算机辅助设计与图形学学报,2005,17(2):295-299.
[13] 佟雨兵,张其善,祁云平.基于 PSNR 与 SSIM 联合的图像质量评价模型[J].中国图象图形学报,2006,11(12):1758-1763.
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
金属加工(冷加工)(2020年11期)2020-11-24 08:58:20
测控技术(2018年5期)2018-12-09 09:04:24
精密制造与自动化(2018年1期)2018-04-12 07:42:50
电脑知识与技术(2018年35期)2018-02-27 13:29:44
自动化学报(2017年11期)2017-04-04 02:52:44
现代防御技术(2016年1期)2016-06-01 12:13:28
设备管理与维修(2016年5期)2016-03-16 02:20:46
新高考·高一物理(2016年1期)2016-03-05 22:47:39
电视技术(2014年11期)2014-12-02 02:43:28