非对称支撑转子系统的动力学行为特性研究
2018-06-05 08:16:06刘永葆刘李欢
兵器装备工程学报 2018年5期
李 默,刘永葆,刘李欢,王 强,c
(海军工程大学 a.动力工程学院; b.电气工程学院; c.兵器工程学院, 武汉 430033)
轴承-转子系统是一种典型的机械结构形式,广泛应用在舰艇、飞机、车辆等设备中,其支撑方式以滚动轴承为支撑,滚动轴承具有复杂的非线性行为。目前,对以滚动轴承为支撑的转子系统的研究还不够完善,国内外一些学者应用非线性理论对滚动轴承-转子系统进行了动力学研究,陈果、张利芹、张耀强、Tiwari、S.H.UPANDHYAY[1-5]建立了两端都是滚动轴承为支撑的转子系统模型,利用轴承的Hertz接触力,综合考虑了轴承的变刚度频率和转子的不平衡量,研究了轴承的径向游隙与转子系统的非线性行为的关系;陶海亮[6]利用有限元软件,建立了滚动轴承-转子系统的有限元模型,考虑了转子不平衡量和碰摩故障的耦合作用,研究了轴承对故障耦合的影响;白长青[7]根据Floquet理论研究了轴承的径向游隙与转子系统周期解稳定性的关系;魏彬[8]建立了滚球轴承-转子系统非线性动力学模型,研究了轴承的预紧力、内外滚道的曲率等结构参数对系统动力学的影响;Alireza Moazenahmadi[9]建立了有缺陷的故障滚球轴承支撑的转子系统,研究了轴承的故障信号对系统动力学的影响;文献[10]建立了滚柱轴承支撑的转子系统模型,分析了轴承的缺陷故障对转子系统的动力学影响;黄亚明、叶鹏[11-12]在研究轴承缺陷故障对滚动轴承-转子系统的动力学影响时,建立了考虑赫兹接触和轴承变刚度频率的轴承-转子模型。
以上学者建立的转子系统模型的支撑结构都是对称的,而且支撑轴承都是滚球轴承。但是在实际旋转机械中,如某型舰用燃气轮机压气机转子系统,其支撑结构一端为滚球轴承,同时受到轴向力和径向力,另一端为滚柱轴承,主要承受径向力,起到支撑作用,该支撑结构方式的转子系统时常发生故障。因此迫切需要开展对非对称支撑转子系统的非线性动力学研究,为此类旋转机械的理论设计和故障诊断提供理论依据。
1 非对称支撑的轴承-转子动力学模型
图1中,OL、OR、OP1、OP2分别为滚球轴承的形心、滚柱轴承的形心、转子形心和转子质心,图2是滚动轴承的支撑模型图,Ri是轴承的内径,Ro是轴承的外径。本文所构建的非对称支撑的集中质量的转子模型,考虑了两类滚动轴承的非线性Hertz接触力,并且综合了转盘的不平衡量,根据 Lagrange方程原理,建立了非对称支撑的滚动轴承-转子系统的动力学微分方程组:
(1)
方程组(1)中符号的意义见表1。
根据实际轴承转子系统的各部分之间的连接情况,为了更好的分析轴承—转子系统的动力学行为,做出如下假设:轴承的内滚道与转子刚性连接;轴承的外滚道与基座刚性连接;滚动体在内、外滚道之间做纯滚动运动,不产生滑移。基于以上假设,轴承的支撑力为:
当滚动轴承为滚球轴承时,n=3/2,当滚动轴承为滚柱轴承时,n=10/9。

第j个滚动单元的接触变形量为χj=xcosθj+ysinθj-Gr。

图1 非对称支撑的轴承—转子系统模型图

图2 滚动轴承支撑模型图
对方程(1)进行无量纲化处理,引入无量纲参数:
根据无量纲参数和方程(1),得到如下的无量纲方程:
(2)
2 非对称支撑轴承—转子系统的非线性动力学数值仿真分析
2.1 模型的参数设置
本文所建立的非对称支撑轴承—转子系统模型中,转盘的参数为mp=120 kg,kp=2.5×107N/m,cp=1 050 N ·s/m,e=10 μm,左端为滚珠轴承SKF 6204支撑,右端为滚柱轴承SKF NJ204ECP支撑,轴承的参数来自文献[10],详细的结构参数如表2。
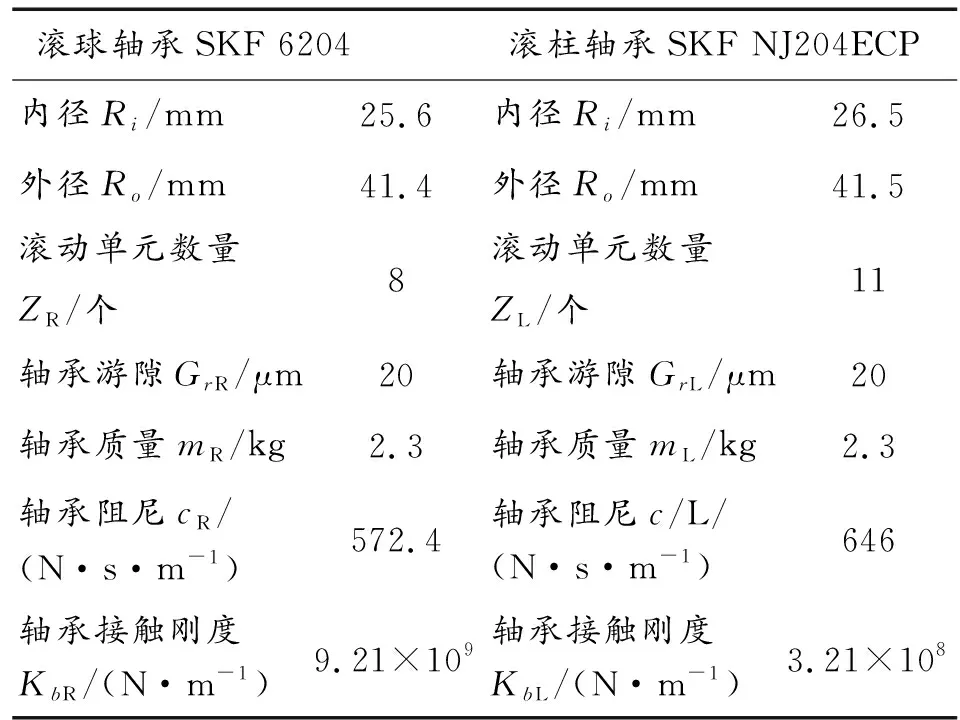
表2 轴承参数

方程组(2)中的两个轴承的支撑力是一个复杂的非线性形式的力,方程组(2)具有强烈的非线性,难以用的小参数法、平均法等近似分析方法求解析解。因此本文采用比较成熟的四阶Runge-Kutta 法对非线性方程组进行数值求解,利用系统相图、Poincare图、FFT图对数值结果进行可视化处理并分析,FFT图的横坐标为信号频率与旋转频率的比值,定义为频率比。
2.2 转速对非对称支撑轴承—转子系统的动力学影响
转速是转子系统最基本的参数,转子系统在启动、正常工作和停止时,都要对转子系统的转速进行监测,所以必须研究转速变化时,非对称支撑轴承—转子系统的非线性动力学特性。
图3是转盘位移xp随转速增加的分岔图,从图3可知非对称支撑轴承—转子系统具有较强的非线性行为。随着系统的转速增加,系统逐渐出现了拟周期、单周期、周期二、混沌、周期二、单周期的现象,并发现系统通往混沌的倍周期分岔途径和阵发性途径。
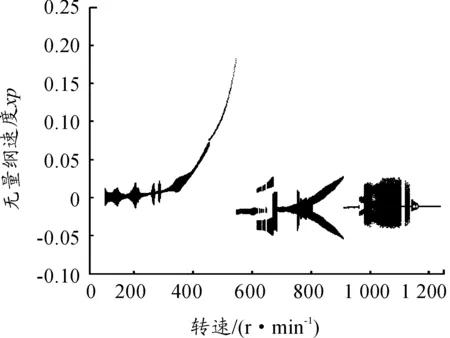
图3 转盘位移xp随转速增加的分岔图
转速在100~453 rad/s时,由于系统存在滚球轴承和滚柱轴承两个变刚度频率以及不平衡量频率,三个频率互相影响,存在复杂的频率组合情况,在此转速范围内,出现拟周期环面破裂和重组的间隔运动。图4(a)是转速为100 rad/s时系统FFT图,在频率比为4.28处有个最大峰值,图4(b)是转速为150时,系统的FFT图,在频率比为3.05时,出现了一个最大波峰,在频率比为4.28和1时,有两个小的波峰,得知系统仍然为拟周期状态,说明此时滚球轴承的变刚度频率影响大。通过分析转速100 rad/s和150 rad/s时的FFT图,得知低转速时,不平衡量频率对转子系统的影响比较小,支撑轴承的变刚度频率对转子系统影响比较大, Fukata[13]研究也表明,系统在转速低于临界转速时,滚动轴承的变刚度频率起主导作用,本文的计算结果与Fukata的结论一致,说明非对称支撑轴承-转子系统模型的正确性和求解结果的合理性。
转速435~670 rad/s时,不平衡量的大小与转速的平方成正比,随着转速的增加,不平衡量迅速增加,不平衡强迫振动的影响越来越大,体现为系统逐渐做以不平衡频率为主要频率的运动。图5是转速为540 rad/s时,系统转盘出x方向的位移相图、Poincare截面图和FFT图,相图是一个封闭的圆环,Poincare截面图集中于一点,FFT图显示只在不平衡量的频率处出现峰值。
转速在670~800 rad/s时,随着转速的增加,系统出现不平衡量频率的分频和滚动轴承两种变刚度频率互相影响的和或差的频率,系统Poincare图由不规则的封闭环形变成规则的环状,拟周期运动逐渐稳定。图6是转速为670 rad/s时系统转盘位移xp的相图、Poincare截面图和FFT图,FFT图上有三个频率峰值,分别是不平衡量的1/3分频谐波、不平衡量的2/3分频谐波和不平衡量的频率;图7是转速为720 rad/s时系统转盘位移xp的相图、Poincare截面图和FFT图,FFT图上有一个频率峰值,由此可见随着转速的增加,系统的分频消失。
转速在800~920 rad/s时,转速增加时,系统又出现不平衡量频率的1/2分频谐波,拟周期环面开始破裂,出现两个拟周期环;转速继续增加,1/2分频的影响增强,两个拟周期环越来越清晰,环面的范围逐渐缩小,演变成周期二运动,并逐渐稳定。图8显示了系统的Poincare图的变化过程。
转速在920~978 rad/s时,系统由周期二运动倒分岔进去单周期运动,其相图映射为一个圆环,Poincare映射图集中于一点。图9是转速961 rad/s时系统的相图、Poincare图和FFT图,FFT图上只在不平衡量频率处出现一个最高峰,随着转速增加,FFT图上又出现不平衡量频率的1/2分频谐波,系统运动由单周期倍周期分岔进去周期二运动,这是典型的倍周期分岔行为。
转速在978~1 139 rad/s时,如图10和图11,周期二变成混沌行为,FFT图上在1/2倍分频周围出现连续谱,表明系统存在混沌行为。转速增加,系统又从混沌行为进去单周期,只有不平衡量频率,然后又进去混沌行为,这是一种通往混沌行为的阵发性途径。
转速在1 139~1 200 rad/s时,混沌行为演变成周期二行为,并在转速的增加时,1/2分频谐波的影响变小,系统逐渐稳定在单周期运动,只有不平衡量频率出现。图12显示了系统的周期二运动。

图4 转速为100 rad/s、150 rad/s系统的FFT图
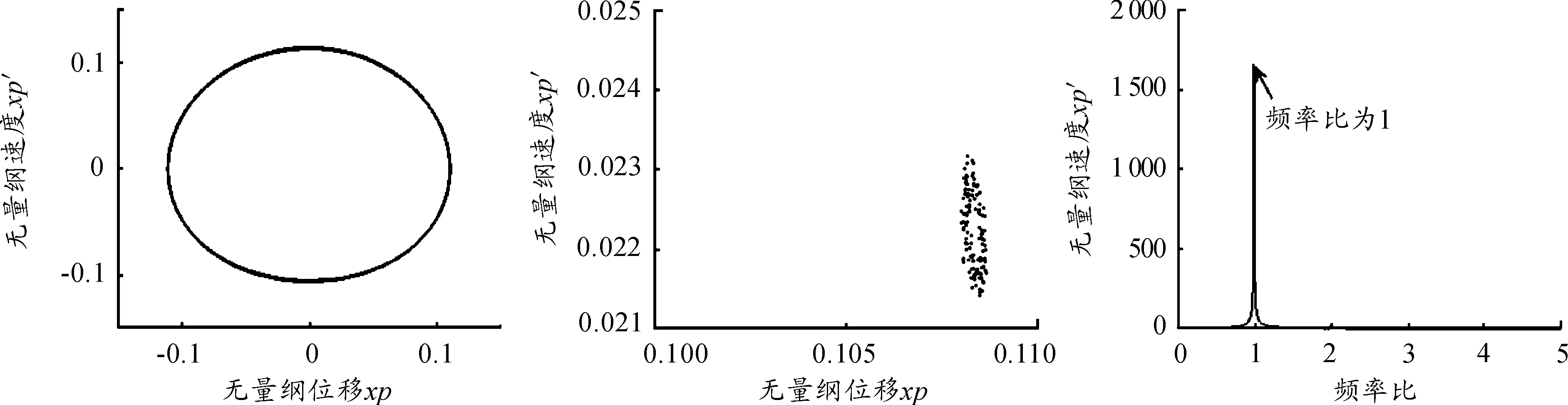
图5 转速为540 rad/s时系统的相图、Poincare图和FFT图
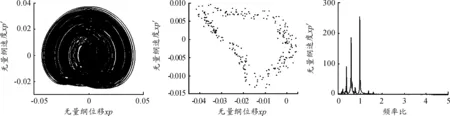
图6 转速为670 rad/s时系统的相图、Poincare图和FFT图
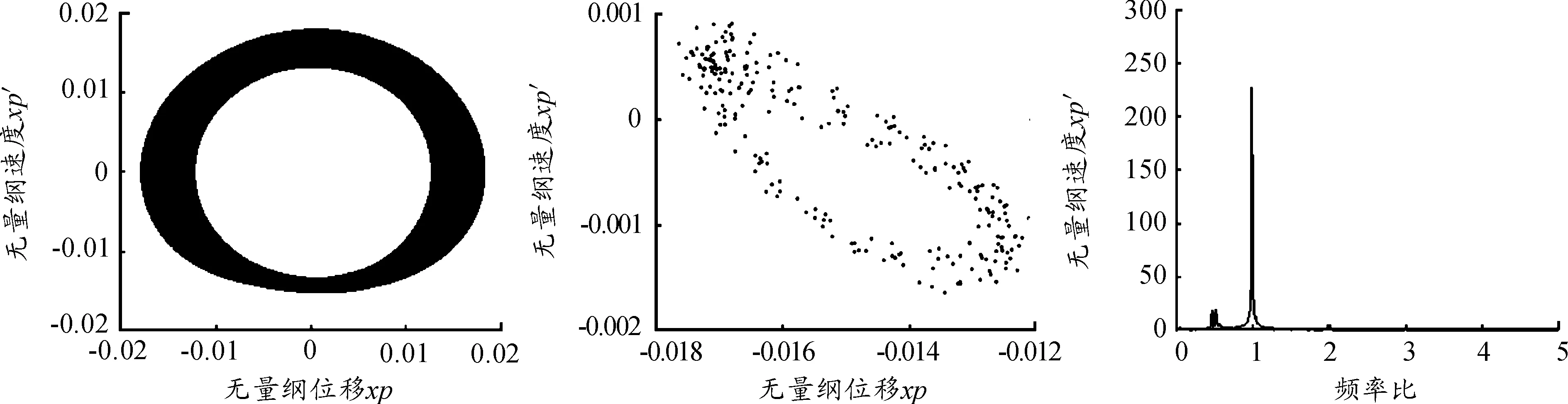
图7 转速为720 rad/s时系统的相图、Poincare图和FFT图
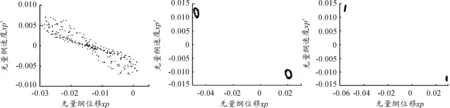
图8 转速为800 rad/s、890 rad/s、913 rad/s系统的Poincare图
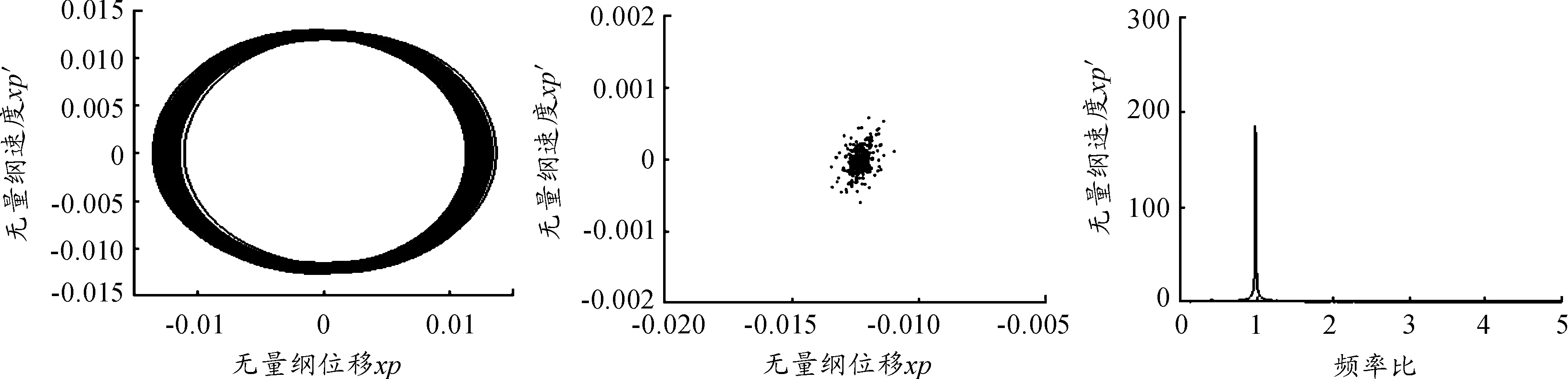
图9 转速为961rad/s系统的相图、Poincare图和FFT图

图10 转速为970rad/s系统的相图、Poincare图和FFT图
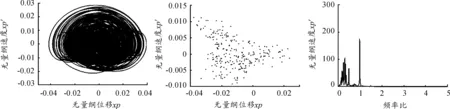
图11 转速为1090rad/s系统的相图、Poincare图和FFT图
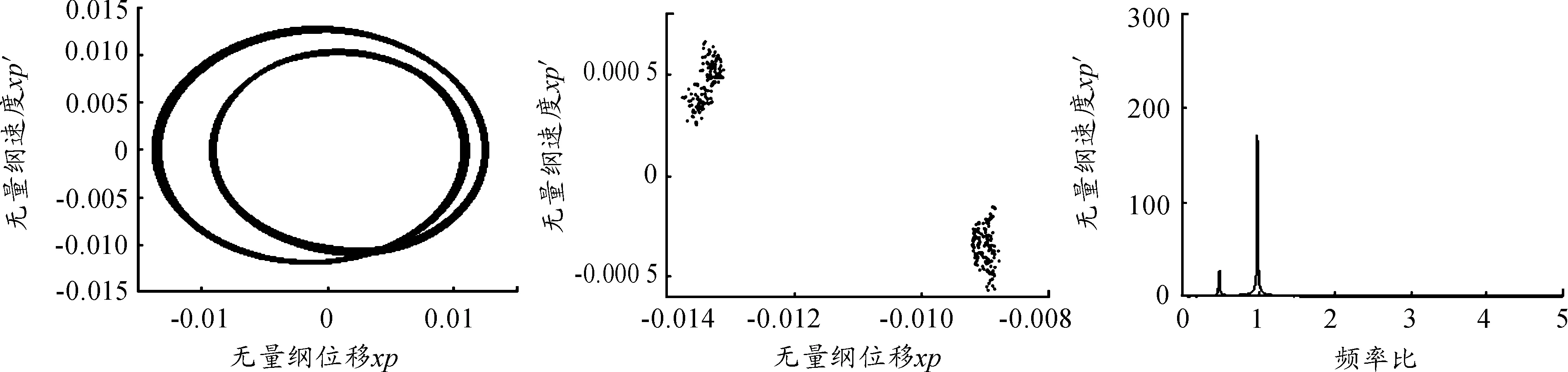
图12 转速为1160rad/s系统的相图、Poincare图和FFT图
3 结论
1) 非对称支撑的轴承-转子系统存在三个频率,滚球轴承的变刚度频率、滚柱轴承的变刚度频率和系统的不平衡量频率;轴承的支撑力主要与轴承质心位移有关,不平衡量与系统转速的平方成正比。因此低转速时,不平衡量对系统的影响较小,系统主要表现为轴承的变刚度频率振动与Fukata的研究结果一致,验证了本文建立的非对称支撑的轴承-转子系统模型的正确性及变步长四阶RK 法数值求解此类非线性方程组的合理性,并能够满足精度要求。
2) 在高转速时,系统的不平衡量迅速增加,成为系统振动的主要影响因素,非对称滚动轴承支撑的转子系统主要出现不平衡量的1/2分频和1倍频。
3) 通过对转盘处横向位移随转速的分岔行为分析,发现非对称滚动轴承支撑的转子系统通往混沌的两种途径:倍周期分岔和阵发性途径。
[1] 陈果.滚动轴承支撑下的不平衡转子系统非线性动力响应分析[J].中国机械工程,2007,18(23):2773-2778.
[2] 张利芹.滚动轴承-转子系统的非线性动力学分析[J].重型机械科技,2007(1):20-26.
[3] 张耀强.滚动轴承-Jeffcott 转子系统非线性动力响应分析[J].振动与冲击,2008,27(5):56- 59.
[4] TIWARI M,GUPTA K.Effect of radial internal clearance of a ball bearing on the dynamics of a balanced horizontal rotor[J].Journal of sound and Vibration,2000,238(5):723- 756.
[5] UPANDHYAY S H.Analysis of Nonlinear Phenomena in High Speed Ball Bearing due to Radial Clearance and Unbalanced Rotor Effects[J].Journal of Vibration and Control,2010,16(1):65-88.
[6] 陶海亮.滚动轴承- 转子系统非线性动力响应分析[J].燃气轮机技术,2013,26(1):15-20.
[7] 白长青.考虑径向内间隙的滚动轴承平衡转子系统的非线性动力稳定性[J].应用数学和力学,2006,27(2):159-169.
[8] 魏斌.滚动轴承-转子系统动力学特性分析[J].轴承,2012(10):1-6.
[9] ALIREZA M.A nonlinear dynamic model of the vibration response of defective rolling element bearings[J].Australian Acoustical Society,2013,17:1-7.
[10] GHAFARI S H.GOLNARAGHI F,ISMAIL F.Effect of localized faults on chaotic vibration of rolling element beariongs[J].Nonlinear Dynamic,2008,53:287-301.
[11] 黄亚明.含典型轴承故障的双盘转子—滚动轴承系统非线性动力学响应[C]//第十六届全国模态分析与试验学术会议.天津:2016.
[12] 叶鹏.滚动轴承-转子系统缺陷故障建模及动力学行为分析[J],西安工业大学学报,2017,38(7):607-612.
[13] FUKATA.On the Radial Vibration of Ball Bearings (Computer Simulation) [J].Bulletin of the JSME,1985,28:899- 904.
[14] 叶鹏,武澎,李振.含双时滞紊流滑动轴承-转子系统的动力学行为分析[J].重庆理工大学学报(自然科学),2016(8):52-56.
猜你喜欢
哈尔滨轴承(2022年2期)2022-07-22 06:39:32
哈尔滨轴承(2022年1期)2022-05-23 13:13:24
考试与评价·高二版(2021年4期)2021-09-10 07:22:44
哈尔滨轴承(2021年2期)2021-08-12 06:11:46
哈尔滨轴承(2021年1期)2021-07-21 05:43:16
艺术品鉴(2020年3期)2020-07-25 01:53:42
学生天地(2020年22期)2020-06-09 03:07:40
东坡赤壁诗词(2019年5期)2019-11-14 10:36:10
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:50
数学理论与应用(2016年4期)2016-05-17 04:50:23