共面变相位星座多目标交汇序列优化方法
2018-05-26 02:26:12吕博洋邵兴悦杨桂清
宇航总体技术 2018年3期
吕博洋,邵兴悦,袁 斌,杨桂清
(1.北京机电工程总体设计部,北京 100854;2.中国航天科工运载技术研究院,北京 100037)
0 引言
随着通信和导航等技术的快速发展,由多颗卫星组成的卫星星座凭借其覆盖能力强和可靠性高的优势开始在相关领域发挥越来越大的作用[1]。为了使星座在受到太阳风暴等不利因素大面积影响后仍能够充分发挥效能,利用具有快速响应能力的运载器以较少的发射次数,一次搭载多个具有变轨能力的空间机动装置实现与星座中不同目标的交汇,实现对在轨航天器的交汇、接近并进行近距离检测和相关维护在当前情况下就显得尤为重要。
张雅声等[2]研究了单个航天器利用初始轨道面与目标航天器轨道的交点实现与异面航天器的交汇;张敬等[3]对单个航天器在不进行变轨情况下与星座中多目标交汇的轨道进行研究。本文以Lambert轨道为基础,提出基于穿越点[2]的机动轨道共面变相位交汇方法,将复杂的空间交汇关系转换为同一机动轨道面内不同转移角、不同转移时间的Lambert交汇问题;从空间几何解析法的角度出发,推导了交汇点的快速确定方法;基于空间机动装置分离点参数,分析并得到转移角、转移时间包络区,给出能量约束下的多目标交汇序列确定方法。在此基础上利用离散优化算法实现基于星座效能的机动装置交汇目标序列的优化,在发射次数有限的情况下将星座效能恢复至正常水平。
1 同一机动轨道面内的多目标交汇
对于利用同一机动轨道面内的多个机动装置与Walker星座进行多目标交汇的情况如下:
图1为机动装置在同一机动轨道面内与星座中多个目标交汇示意图。其中,机动轨道面是由射向A0、分离点位置和分离时刻共同决定的一个平面,所有以射向A0、在同一分离点并在同一分离时刻进入轨道的机动装置均位于该平面内。平面与目标轨道的交点如图1所示。由于进行轨道交汇的过程中需要同时满足多个位置约束和时间约束,确定机动装置在同一轨道面内与不同目标轨道的交汇目标以及时序存在较大的难度。因而需要寻求一种确定交汇点位置以及机动装置变轨相位和时间的解析方法对此问题进行解决。
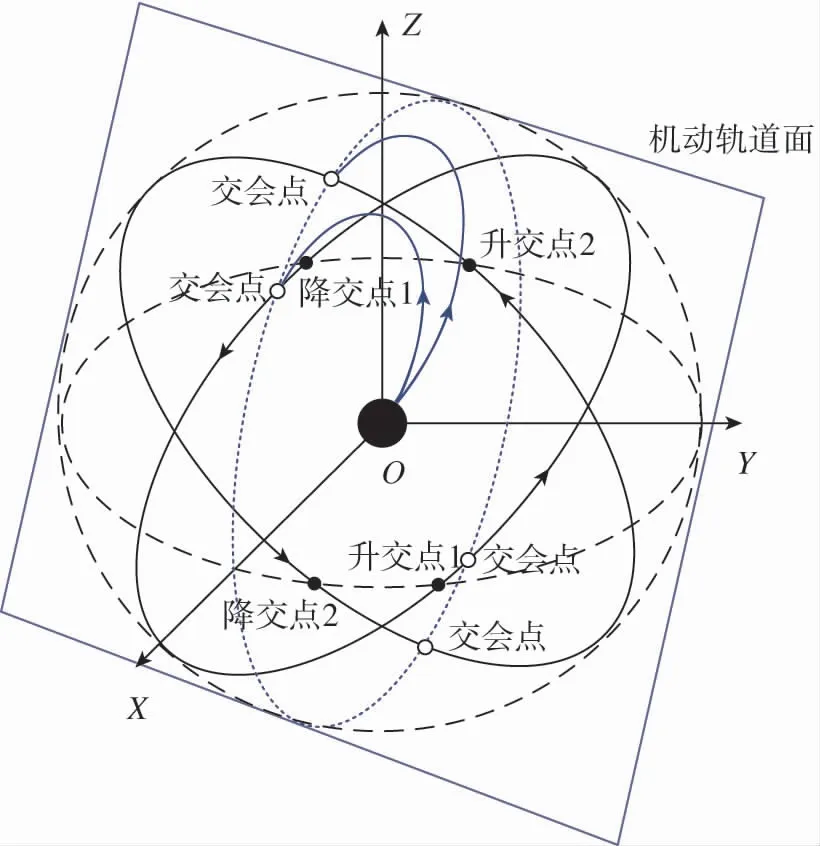
图1 同一机动轨道面内的多目标交汇Fig.1 Multi-targets meeting in the same plane of maneuver
为了便于描述机动轨道面与各目标轨道面之间的空间几何关系,将机动装置所处的轨道面转换为一个与目标轨道高度相同并位于机动轨道面内的圆轨道。这条轨道与目标轨道的交点位置与机动轨道面和目标轨道的交点相同,如图2所示。这样就将机动装置与多个异面目标的空间交汇转化为机动装置在多个轨道面内与共面目标的交汇。

图2 同一机动轨道面内的目标轨道交点与机动轨道Fig.2 Orbit of targets and maneuvering trajectories in the same plane of maneuver
1.1 机动装置变轨相位和时间的确定
设目标航天器S1位于轨道倾角为i1、升交点赤经为Ω1、轨道半径为r1的圆轨道O1上;空间机动装置W1位于轨道倾角为i2、升交点赤经为Ω2的椭圆轨道。由于机动装置与目标轨道的交点同样位于该轨道面内,因此利用升交点赤经为Ω2、轨道倾角为i2、轨道半径同为r1的圆轨道O2可以对轨道交点位置以及两者相位关系进行描述。
1.1.1 机动轨道面与目标轨道交点的确定
如图3所示,点A和点B分别为O1和O2的升交点,轨道O1和O2相交于点C。其中,f1为点C在O1上的纬度幅角,f2为点C在O2上的纬度幅角,α为O1和O2在点C处的夹角,ΔΩ为O1和O2的升交点赤经之差。

图3 轨道交点示意图Fig.3 Sketch map of orbital node
由球面三角形公式[4-5]可得,
α= arccos[-cos∠CABcos∠CBA+
sin∠CABsin∠CBAcosΔΩ]
(1)
(2)
其中,当Ω1<Ω2<Ω1+π时,即点C在O2的升段上:
当Ω1<Ω2+π<Ω1+π时,即点C在O2的降段上:
即可确定O1和O2的交点f1、f2。
1.1.2 机动装置相位和时间的确定
设机动装置W在t0时刻到达运载段分离点,在轨道O1上,目标航天器S1该时刻的纬度幅角为fS1(t0)。此时,目标航天器S1与轨道O1、O2的交点C的相位差为:
Δf1(t0)=f1-fS1(t0)
由分离点位置以及轨道倾角,可知分离点在机动轨道面,即轨道O2内的纬度幅角f0为[4]:
(3)
其中,φk为分离点赤纬。
因此,由分离点纬度幅角f0和交汇点在O2上的纬度幅角f2可得机动装置在分离点处与轨道交点C的相位之差为:
Δf2(t0)=f2-fW(t0)
fW(t0)=f0
在t时刻,机动装置W和目标航天器S1与轨道交点的相位差分别为:
Δf1(t)=f1-fS1(t)
Δf2(t)=f2-fW(t)
假设机动装置W与目标航天器S1在t时刻交汇,在t时刻必有
即
则目标航天器S1沿轨道O1从t0时刻所在位置运行至交点所需的时间为:
(4)
其中,T为目标航天器S1的轨道周期。
机动装置W沿机动轨道从分离点运行至交点过程中经过的弧段对应的地心角为:
f2-f0=Δf2(t0)
(5)
因而,若令机动装置W在轨道倾角为i2、升交点赤经为Ω2的轨道面内与沿轨道O1运行的航天器S1交汇,机动装置W需同时满足轨道转移角度Δf2(t0)、转移时间Δt1的相位约束和时间约束。将轨道转移角度Δf2(t0)记为β,转移时间记为ttrans,如图3所示,可得:
(6)
同理,改变目标轨道的升交点赤经,可得到机动轨道面与星座中所有目标轨道的交点以及机动装置Wi与目标航天器Si交汇对应的转移角βi、转移时间ttrans_i(i=1,2,…,n,n为星座中的目标轨道数量)。
1.2 变轨待增速度约束下的转移角-时间包络区
对于单圈内的Lambert转移,当变轨转移时间和转移角给定后,转移轨道类型以及转移速度就能够确定。设机动装置W在分离点的速度为vk0、速度倾角为θk0,轨道转移的需要速度为vk、速度倾角为θk,Δθ为θk与θk0之差,则
Δθ=θk-θk0
将分离点速度vk0沿vk做投影,在vk方向和垂直vk分别得到两个速度分量[5]:
v1=vk0cosΔθ
v2=vk0sinΔθ
则
即
(7)
由式(7)可知,待增速度Δv受到速度vk、vk0和速度倾角θk、θk0的共同影响。其中,vk0和θk0为分离参数,vk和θk由轨道转移角度β和转移时间ttrans决定。
当运载段分离点速度vk0和分离点速度倾角θk0给定、目标轨道为轨道周期为12h的圆轨道时,待增速度Δv随轨道转移角度β和转移时间ttrans的变化情况如图4、图5所示。
图4为θk0=30°时,Δv随轨道转移角度和转移时间的变化情况,Δv在β=70°~150°附近较小,在β=0°和β=360°附近急剧增大,在β=360°附近达到最大值。图5为θk0=70°时,Δv随轨道转移角度和转移时间的变化情况,Δv在β=50°附近较小,在β=0°附近小幅增大,在β=360°附近急剧增大,在β=360°附近达到最大值。
在不同分离点速度倾角下,分离点速度vk0变化不大且轨道转移速度vk随转移角度和转移时间的变化幅度明显小于Δv的变化幅度。对比图4和图5不难发现:分离点速度倾角θk0对Δv的大小影响较大;Δv较小值所对应的区域分别与θk0=30°等值线和θk0=70°等值线所在区域一致(如图7所示)。在θk与θk0相差较大的区域,Δv急剧增大;而需要速度(如图6所示)的变化幅度明显小于待增速度的变化幅度。由此发现,θk和θk0是影响待增速度大小的主要因素,通过调整分离点速度倾角θk0能够有效降低机动装置与目标交汇所需的Δv。

图4 θ=30°时转移角-转移时间-待增速度曲面Fig.4 Transfer angles-transfer times-required increasing speeds as θ=30°
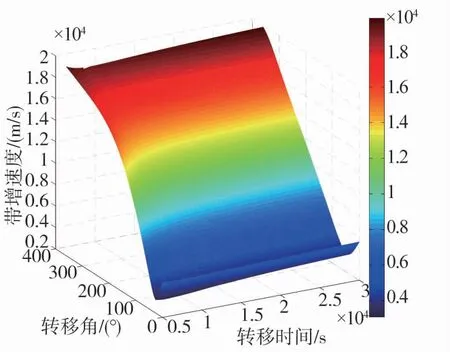
图5 θ=70°时转移角-转移时间-待增速度曲面Fig.5 Transfer angles-transfer times-required increasing speeds as θ=70°
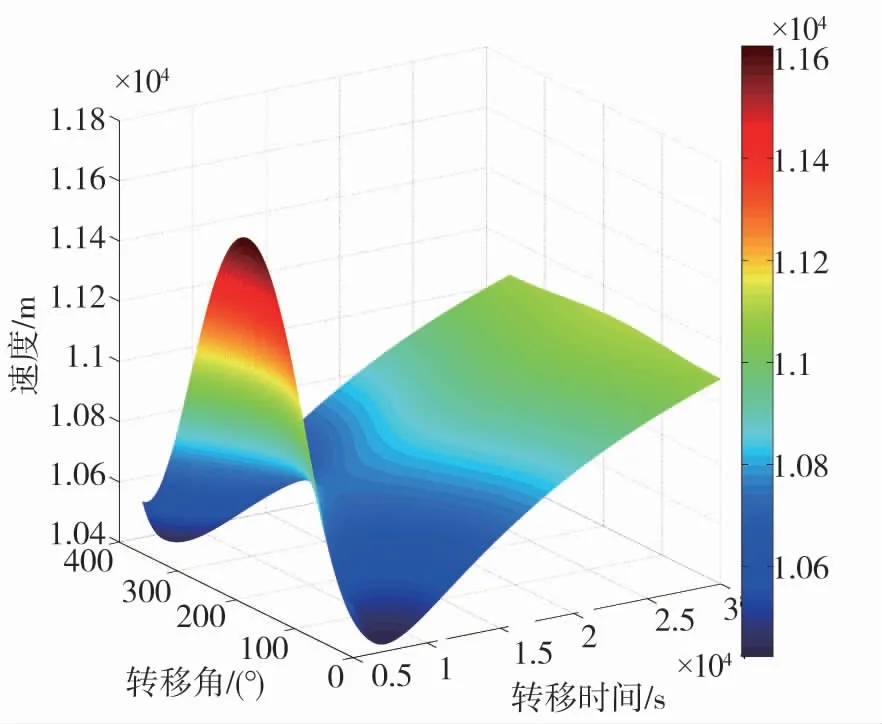
图6 变轨需要速度随转移角-转移时间变化情况Fig.6 Required speeds with transfer angles-transfer times
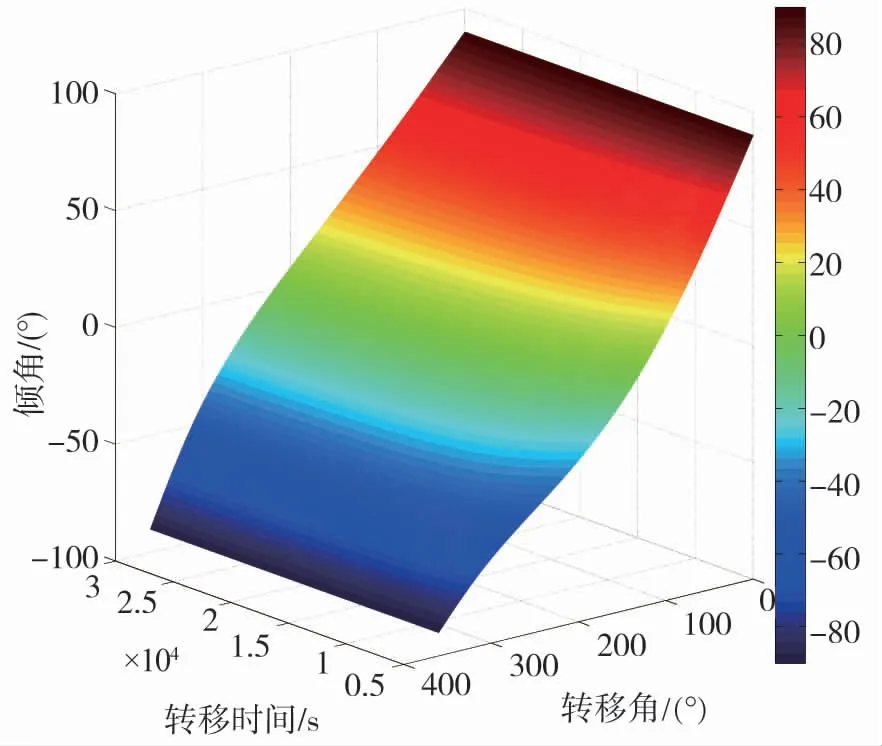
(a)倾角随转移角-转移时间变化情况

(b)倾角等值线图图7 θk随转移角和转移时间的变化情况Fig.7 θk with transfer angles and transfer times
在实际情况中,由于机动装置携带的推进剂数量有限,通常利用最大增速Δvmax对机动装置进行变轨机动时的待增速度Δv进行限制。根据前面得到的待增速度曲面,令Δv=Δvmax可在转移角-转移时间-待增速度曲面中得到满足最大增速约束的包络区域,该区域中所包含的点与满足最大增速需求的变轨转移角β和转移时间ttrans组合相对应。
令Δvmax=2600m/s,分别得到θk0=30°和θk0=70°时满足Δv≤Δvmax的包络区,如图8、图9所示。
图8和图9分别为分离点速度倾角为30°和70°时,满足变轨最大增速约束ttrans-β包络区。在0°<β<360°范围内,θk0=30°对应的可交汇转移角范围是72.58°~154°,θk0=70°对应的可交汇转移角范围是16.33°~52.74°。利用包络区能够得到可交汇范围内的某个转移角度对应的转移时间区间,从而确定目标在交汇点附近的可交汇弧段,即只要机动装置在目标经过该弧段时进入相应的机动轨道,机动装置就有能力在交汇点与目标进行交汇。
对于同一机动轨道面内分离时刻相同的多个机动装置与星座中多个目标交汇的情况进行如下分析:
假设机动装置Wi在轨道面Ow上,其轨道倾角为iw,升交点赤经为Ωw,分离点纬度幅角为fw0,分离点速度为vk0,速度倾角为θk0;目标航天器Si沿轨道Oi运行。机动轨道面与目标轨道Oi(i=1,2,…,n,n为星座中的目标轨道面数量)相交于交汇点Pi;在轨道Ow内,机动装置从分离点至交汇点的转移角为βi;Pi在Oi和Ow上的纬度幅角分别为f1i和f2i。参照θ=θk0时转移角-转移时间包线,得到β=βi与Δv=Δvmax曲线的两个交点,对应的转移时间上限和下限为tup_i和tdown_i。通过计算目标Si经过交汇点的时刻就能够得到机动装置Wi的分离时间范围Ai。
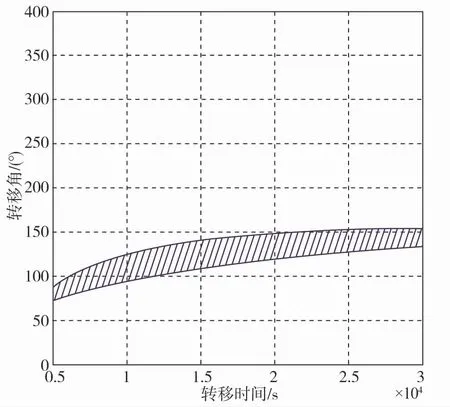
图8 θk0=30°时转移角-转移时间包络区Fig.8 Envelope area of transfer angles and transfer times as θk0=30°
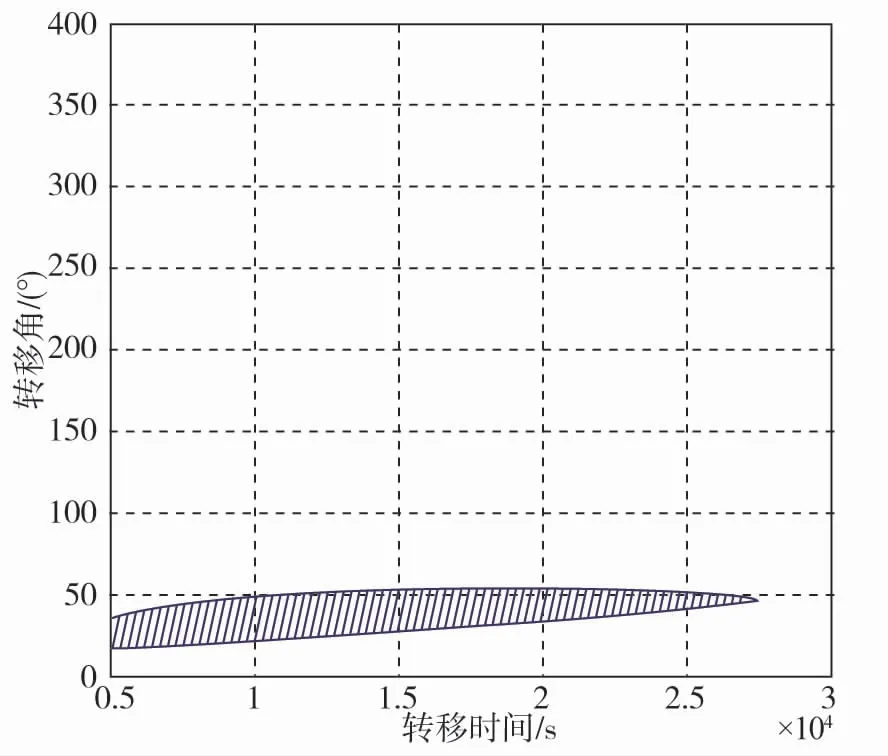
图9 θk0=70°时转移角-转移时间包络区Fig.9 Envelope area of transfer angles and transfer times as θk0=70°
同理,可得到轨道面Ow与星座内其余轨道的交点以及相应的可交汇弧段和分离时间范围。
若机动航天器的分离时间范围满足
Ak∩Ak+1∩…∩Ak+j≠φ
(k=1,2,…,n;j=1,2,…,n-1)
在轨道面Ow内的机动装置可对j+1个轨道面上的目标进行交汇,并将分离时间范围的交集记为Aw。只要机动装置的分离时间tk0∈Aw,机动装置就能够实现与j+1个轨道面上目标的交汇。
对于Δvmax,可以从另外一个角度分析其含义。由式(7)可知,当Δv=Δvmax时,
若要让分离点速度为vk0的航天器在速度增量Δv的作用下达到需要速度vk,且满足Δv≤Δvmax,分离点速度倾角θk0应满足如下要求:
θk-Δθmax≤θk0≤θk+Δθmax
因而,在机动装置的分离点速度大小和需要速度大小为定值时,最大待增速度Δvmax越大,Δθmax越大,机动装置对运载段分离点速度倾角θk0的适应范围也越大。
2 目标序列的优化
在完成机动装置交汇序列的确定后,在不同时间、射向及分离速度倾角下可以得到多组目标序列。但由于不同序列包含相同目标,且星座中不同卫星对指定区域的导航精度贡献程度有所不同,如何在发射次数有限的情况下对目标序列进行优化,使指定区域内的有效覆盖得到最大程度保证成为一个需要解决的问题。
2.1 序列优化的数学模型
根据目标序列优化的实际需求,建立模型如下[6-7]:
设目标的总数量为n,目标序列(分离时间、射向、分离速度倾角、接近目标的组合)的总数量为q,空间机动装置的最大发射次数为m,pi为反映不同目标“价值”大小的目标函数系数;xi为反映目标序列是否被选取的优化变量,当第i个序列被选取时xi=1,反之xi=0;x为包含优化变量xi的行向量,x=[x1,…,xq];机动装置对于同一目标仅进行一次接近,同一时刻只有一组机动装置进入机动轨道,则
其中,不等式约束矩阵A及向量b分别为(n+1)×q维的矩阵和n+1维列向量, Aj为约束矩阵A中位于第j行的q维行向量,bl为列向量b中的第l个元素,两者可分为前n行和第n+1行两部分。
前n行代表对机动装置与同一目标交会次数的约束,Aj中的各元素代表对应的目标序列中是否包含第j个目标。当第i个序列中包含第j个目标时,Aji=1;若不包含,则Aji=0。
例如A1x≤b1代表在所选取的目标序列中包含第1个目标的总次数不超过b1,则根据前文假设(机动装置对于同一目标仅进行一次接近)可知,
bl=1l∈{1,2,…,n}
第n+1行代表对目标序列选取数量的约束,即满足An+1x≤b1。由于机动装置的最大发射次数为m,则
An+1=[1,…,1]1×q,bn+1=m
2.2 评价参数的设定
几何精度因子作为衡量卫星导航系统定位精度的重要指标,反映了导航卫星几何构型对定位精度的影响[8-9]。由于导航卫星星座中不同卫星对指定区域的覆盖特性有所不同,在利用整数规划算法[6]对目标序列的选取进行优化时,需要一个参数表征不同卫星对指定区域几何精度因子贡献程度的大小。这一参数应当能够准确衡量目标的重要程度并体现出不同序列在能量等方面的特性,是进行相关优化工作的基础。
目标特性评价参数主要反映星座对某一区域提供相关服务时目标对服务质量贡献程度,体现该目标在星座中的重要程度。经分析,按照将目标对指定区域的覆盖总时长和访问次数综合考虑的方式设定目标特性评价参数。设第i个目标对指定区域的覆盖总时长为ti、访问次数为ni(i=1,2,…,m,m为星座中的卫星总数量),所有目标中覆盖总时长的最大值为tmax、最小值为tmin,最大访问次数为nmax、最小访问次数为nmin,则
pt(i)和pn(i)分别为反映目标覆盖总时长和访问次数大小的系数,覆盖总时长或访问次数的数值越大对应的评价参数的数值越接近1,反之越接近0。在将目标的覆盖总时长和访问次数综合考虑时,取加权系数ηt和ηn,满足ηt+ηn=1,则第i个目标的目标特性评价参数为
通过调整加权系数ηt和ηn进而调整覆盖总时长和访问次数在目标特性评价参数中所占的比重,实现对目标的覆盖总时长和访问次数的综合考量。通过比较不同加权系数,选取ηt=0.65,ηn=0.35。
此外,在不同时刻、多个射向和入轨速度倾角下的同一组序列可能出现待增速度Δv有所不同的情况,因而有必要将不同入轨条件下目标序列的待增速度大小作为序列选取的评价指标之一。设目标序列中包含l个目标,机动装置与序列中第j个目标进行空间接近所需的待增速度为Δv(j),则待增速度评价参数为
反映该组序列在当前射向、入轨时刻以及入轨速度倾角下的待增速度大小,数值越大表明此时机动装置与序列中目标接近所需的待增速度越小。若序列中第j个目标的待增速度最大,则将该目标的待增速度评价参数作为反映该序列能量需求大小的评价参数。
2.3 目标序列的优化
在对目标序列进行优化前进行如下设定:目标星座的构型为24/6/2,轨道倾角为55°,轨道周期为12h;将目标序列入轨时间范围限定为UTC时间00:00:00.00~24:00:00.00,序列中的目标数量均为3个,每组目标序列的入轨点位置相同,射向A0为0~180°,入轨速度倾角θk0为30°~70°,轨道转移时间限定为5000s~30000s,最大待增速度为2600m/s;同一入轨时刻只选取一组序列,机动装置对于同一目标只进行一次接近;当最大发射次数为m时,机动装置与目标接近使得目标对指定区域的覆盖效能最优且机动装置所需的最大待增速度最小。
目标序列优化的数学模型如2.1节所述。由于目标序列的优化可以归纳为0-1整数规划问题,优化算法采用基于线性规划的分支定界法求解序列优化问题。
当导航星座中有4个轨道面发生卫星大面积失效的情况时,按照覆盖效能最优的策略选取交汇目标,以较少的发射次数满足指定区域内平均几何精度因子小于6的精度需求。发射次数分别为1次、2次、3次和4次时的优化结果,如表1所示。
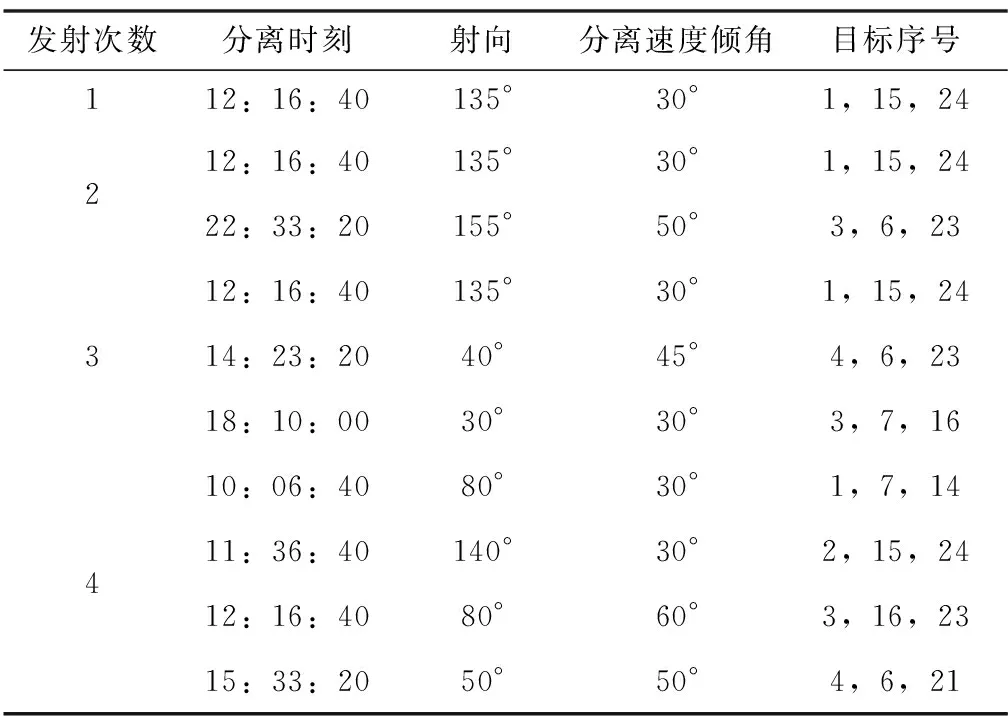
表1 不同发射次数下的优化结果
根据优化结果,利用STK得到机动装置与相应目标交汇后指定区域内的平均几何精度因子。导航星座在只有两个轨道面的卫星能够正常工作的情况下,平均几何精度因子为765.3288,不能满足对指定区域的有效覆盖。当发射次数为1时,机动装置与目标实施交汇后平均几何精度因子为308.6203;当发射次数为2时,机动装置与目标实施交汇后平均几何精度因子为33.6798;当发射次数为3时,机动装置与目标实施交汇后平均几何精度因子为4.4778;当发射次数为4时,机动装置与目标实施交汇后平均几何精度因子为2.3724。计算结果表明:这种将评价参数作为目标函数系数进行目标序列优化的方法是有效的。
图10所示为发射次数分别为1次、2次、3次和4次时,机动装置按照优化结果与目标交汇后指定区域的几何精度因子分布情况。图10中颜色越深的区域,代表该区域的几何精度因子越大,导航精度也越差。当发射次数为3次时,导航卫星星座为指定区域提供的定位精度已能够满足使用需求,即令指定区域导航精度满足精度需求的最小发射次数为3次;当发射次数为4次时,导航卫星星座提供的定位精度达到星座在初始状态下的精度水平。
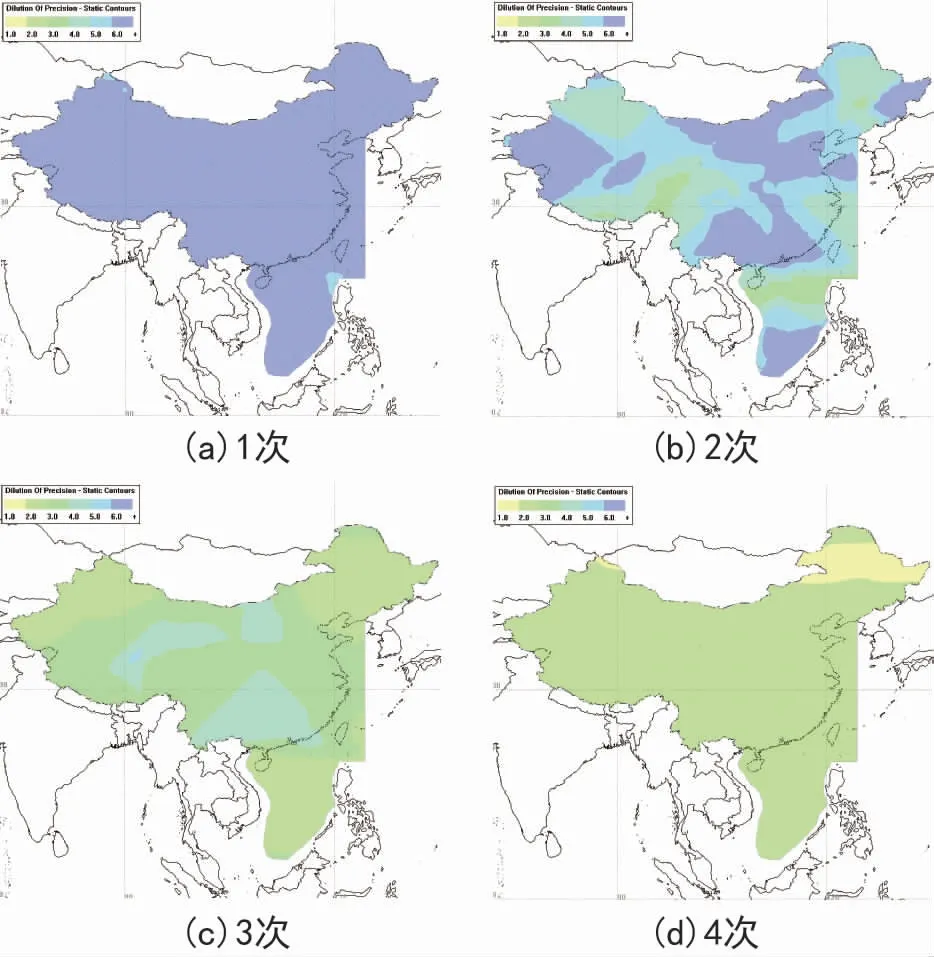
图10 不同发射次数的几何精度因子分布情况Fig.10 Distribution geometric dilution of precison of difference times of launch
3 结束语
本文在利用空间几何解析法确定机动装置变轨相位和时间基础上,从机动装置与目标相对时间、空间位置关系的角度对增速需求与其的关系进行分析,提出利用机动装置的变轨速度需求与运载段分离条件、相位转移角和转移时间包络区确定星座多目标交汇序列的方法。在此基础上,考虑覆盖效能利用离散优化算法实现对目标序列的优化,并对结果进行了仿真验证,为后续的实际应用提供了参考。
参考文献
[1] 郗晓宁,王威,高玉东.近地航天器轨道基础[M].长沙:国防科技大学出版社,2003.
[2] 张雅声,周海俊.基于穿越点的多目标交会轨道设计方法[J].现代防御技术,2013,41(5):1-5.
[3] 张敬, 郗晓宁, 王威.单航天器无需变轨与Walker星座多星交会的充分条件及特性分析[J].国防科技大学学报,2010,32(6):87-92.
[4] 肖亚伦.航天器飞行动力学原理[M].北京:中国宇航出版社,1995.
[5] Vallado D A, McClain W D. Fundamentals of astrodynamics and applications (fourth edition)[M].Califor-nia:Microscosm Press, 2013.
[6] 陈宝林.最优化理论与算法(第二版)[M].北京:清华大学出版社,2005.
[7] 龚纯,王正林.精通MATLAB优化计算(第四版)[M].北京:电子工业出版社,2016.
[8] 王惠南.GPS导航原理与应用[M].北京:科学出版社,2003.
[9] 卡普兰.GPS原理与应用[M].邱致和,译.北京:电子工业出版社,2002.
猜你喜欢
装备制造技术(2020年3期)2020-12-25 05:21:52
少儿美术(快乐历史地理)(2020年4期)2020-08-24 07:21:36
中学生数理化(高中版.高考数学)(2020年3期)2020-05-25 06:53:14
当代陕西(2019年12期)2019-07-12 09:12:02
学生导报·东方少年(2019年7期)2019-06-11 11:03:18
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
中学生数理化(高中版.高考数学)(2018年12期)2019-01-17 01:31:52
数学学习与研究(2017年11期)2017-06-20 00:02:38
青年时代(2017年3期)2017-02-17 01:40:47
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50