基于EKF的主动雷达寻的制导状态估计与最优控制研究
2018-05-26 02:26:22王智,张婕,熊伟,王鹏,李强
宇航总体技术 2018年3期
王 智,张 婕,熊 伟,王 鹏,李 强
(北京宇航系统工程研究所,北京 100076)
0 前言
主动雷达探测技术在飞行器制导中占据着重要位置。在直角坐标系中建立飞行器与目标的相对运动方程,其状态方程是线性的,但观测方程是非线性的[1]。为了获得制导律所需的精确可靠的相对运动状态信息,需要在带有观测噪声的有限测量信息中获取位置信息、速度信息和加速度信息,即非线性系统的状态估计问题。扩展卡尔曼滤波(Extended Kalman Filtered,EKF)方法作为一种非线性系统扩展的线性滤波方法,具有计算量小、易于实现等特点,在非线性系统的状态估计等领域有着广泛的应用。以线性二次型性能指标为基础的最优控制问题具有计算简单、便于调整等优点,由于线性二次型问题解出的控制规律可以通过状态反馈实现最优闭环控制,成为当今控制工程领域里较为重要的设计方法之一。为改善导引弹道特性,提高飞行器导引准确度,本文对基于EKF的主动雷达寻的制导状态估计与最优控制律进行研究。
1 目标机动模型
由于目标机动未知,对目标机动的建模比较复杂。本文采用1阶马尔科夫过程来近似描述目标机动,目标加速度At满足如下的微分方程[2]:
(1)
式中,λ为目标加速度的机动频率,Wt为目标加速度的过程噪声。
2 主动雷达寻的制导状态估计
2.1 状态方程
飞行器M与目标T之间的相对运动关系如图1所示。
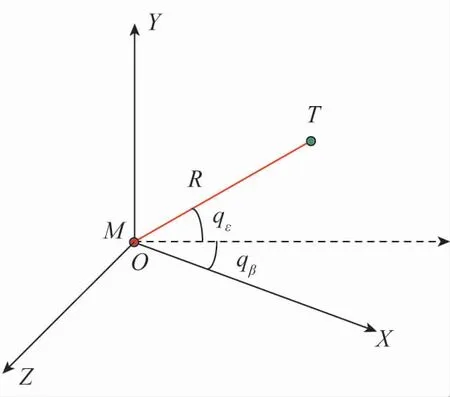
图1 直角坐标系中飞行器与目标相对关系Fig.1 The relationship between flight vehicle and target in Cartesian coordinate system
图1中,OXYZ为惯性坐标系,qε、qβ分别为视线高低角和方位角,R为飞行器与目标之间的斜距。
系统的状态方程为[3-4]:

(2)
式中,x=[rx,ry,rz,vx,vy,vz,atx,aty,atz]T,为状态变量;rx、ry和rz为飞行器与目标之间的相对位置在惯性坐标系中的三分量;
下标t代表目标,下标m代表飞行器,下同。rtx、rty和rtz为目标位置在惯性系中的三分量,rmx、rmy和rmz为飞行器位置在惯性系中的三分量。
vx、vy、vz为飞行器与目标之间的相对速度在惯性坐标系中的三分量。
vtx、vty和vtz为目标速度在惯性系中的三分量,vmx、vmy和vmz为飞行器速度在惯性系中三分量;atx、aty、atz为目标加速度在惯性坐标系中的三分量。

将式离散化后可得
x(k+1)=Φx(k)+Γu(k)+ω(k)
(3)
式中,
其中Δt为采样周期。
动态噪声向量ω(k)为高斯型白色随机向量序列,即:
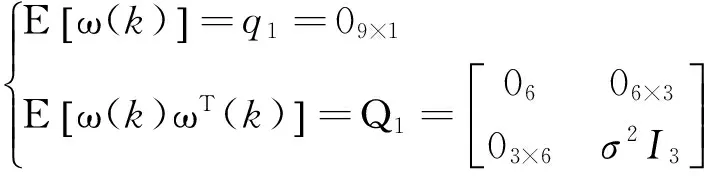
(4)
2.2 测量方程
飞行器采用主动雷达导引头对运动目标进行主动探测,观测量为弹目距R、视线高低角qε和视线方位角qβ。实际测量中导引头具有测量噪声,测量值是真实状态的非线性函数,并受到高斯白噪声的干扰[5-6]。观测模型为:
z(k)=h[x(k),k]+υ(k)
(5)
式中,h[x(k),k]代表测量值的真值,为
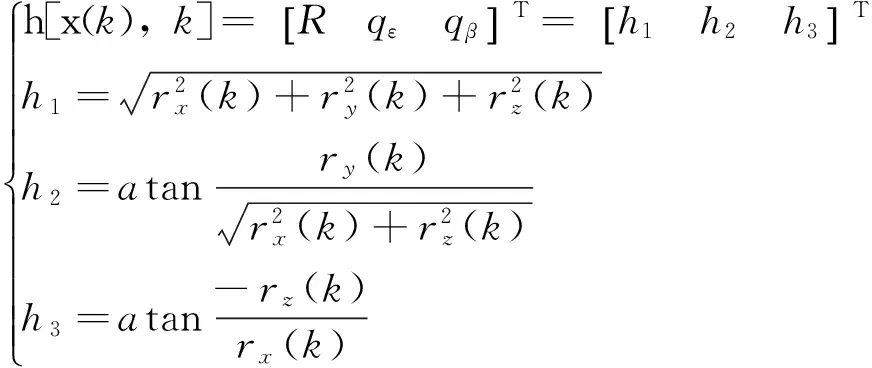
(6)
υ(k)为测量噪声,是高斯型白色随机向量序列,即:
(7)
且ω(k)与υ(k)相互独立。
对于主动雷达导引头,测量噪声方差R1可以表示为:
(8)

对于主动雷达寻的制导,需要利用所测得的弹目距、目标方位角信息估计目标的运动参数。从模型上看,状态方程是线性的,观测方程是非线性的。对于非线性系统状态估计问题,应用扩展卡尔曼滤波方法将其转换为一个近似的线性滤波问题[7]。


(9)
令:
则观测方程为:
z(k)=H(k)x(k)+y(k)+υ(k)
(10)
观测矩阵H(k)由h的雅克比矩阵得到,即:
(11)
综合式(6)和式(11),得到:
(12)
式中,
Λ32=0
对线性化后的模型式和式应用EKF进行状态估计。
3 线性二次型最优制导律
线性二次型问题解出的控制规律可以通过状态反馈实现最优闭环控制,同时具有计算简单、便于调整等优点。为使需用过载和脱靶量尽可能小,选取指标函数为:[8]
式中,tf为飞行器飞行时间。
根据庞特里亚金极小值原理[9],可得最优制导律为:
(13)
式中,
tgo=tf-t
式中,tgo为飞行器剩余飞行时间;N为导航比,需要根据飞行器制导系统通频带和剩余飞行时间综合确定。
最优制导律所需的弹目相对运动信息通过滤波器状态估计得到。
4 仿真分析
设制导初始时刻目标与飞行器之间的相对运动关系为:
rx(0)=3500m,ry(0)=1500m,rz(0)=1000m
vx(0)=-1100m/s,vy(0)=-150m/s,
vz(0)=-50m/s
atx(0)=10m/s2,aty(0)=10m/s2,
atz(0)=10m/s2

EKF中,状态估计的初始值为:
rx(0|0)=3000m,ry(0|0)=1200m,
rz(0|0)=800m
vx(0|0)=-1000m/s,vy(0|0)=-120m/s,
vz(0|0)=-40m/s
atx(0|0)=8m/s2,aty(0|0)=6m/s2,
atz(0|0)=5m/s2
状态方差阵的初始估计值为:
目标的跟踪轨迹如图2所示。跟踪轨迹最终表明,轨迹趋于一致,验证了基于EKF的状态估计方法和基于线性二次型最优制导律的有效性。
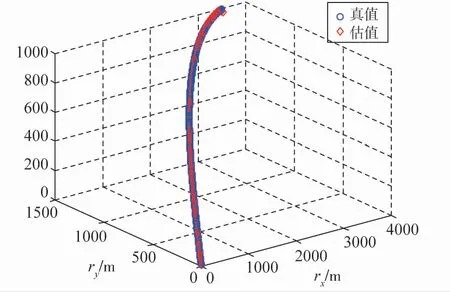
图2 EKF跟踪轨迹与真实轨迹Fig.2 EKF tracking trajectory and real trajectory
状态估计值与真实值之间的对比曲线见图3~图5,状态估计值与真实值之间的偏差如图6~图8所示。可以看出,无论位置还是速度,最终都趋于收敛。
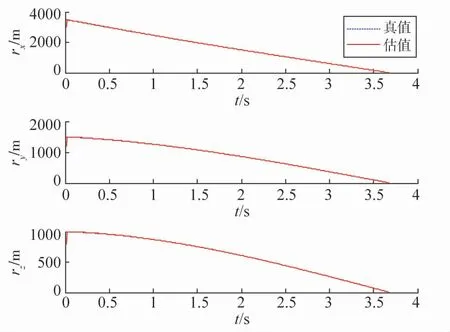
图3 相对位置估计值与真实值Fig.3 Estimated and real values of relative position
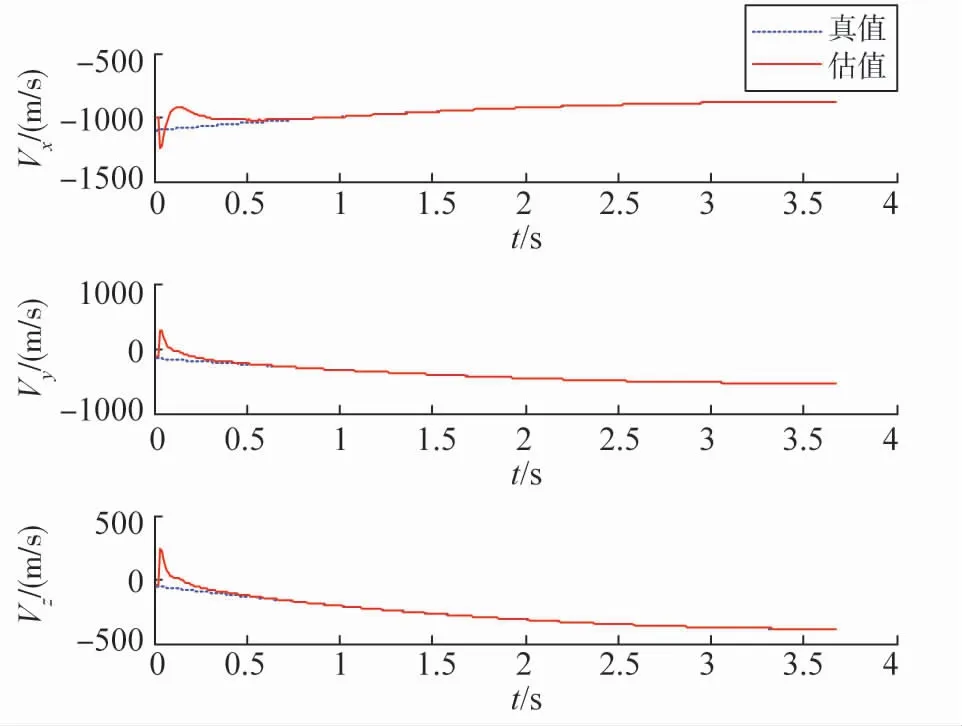
图4 相对速度估计值与真实值Fig.4 Estimated and real values of relative velocity

图5 目标加速度估计值与真实值Fig.5 Estimated and real values of target acceleration

图6 相对位置估计误差Fig.6 Estimation error of relative position
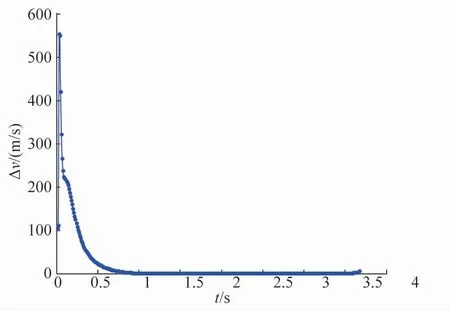
图7 相对速度估计误差Fig.7 Estimation error of relative velocity
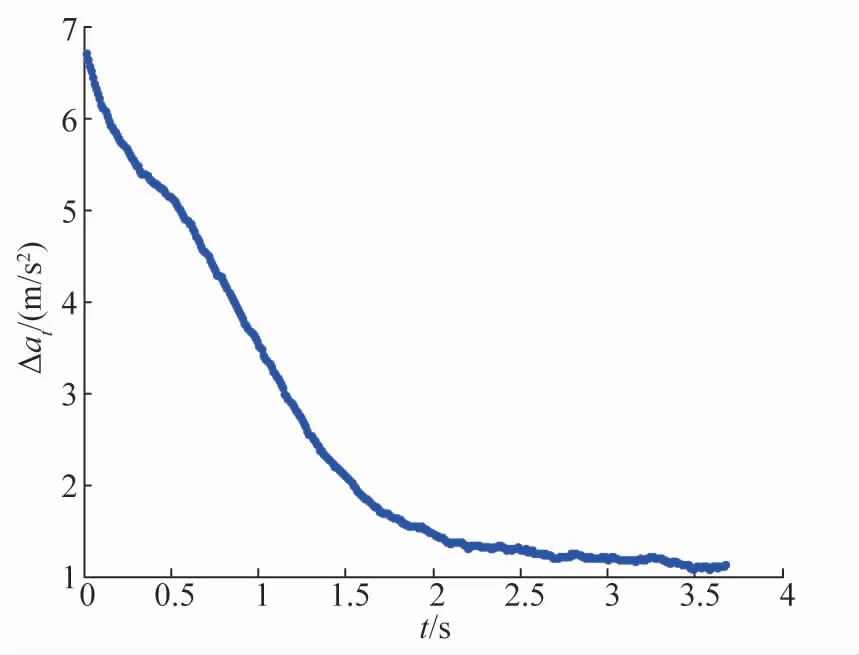
图8 加速度估计误差Fig.8 Estimation error of acceleration
5 结论
本文利用扩展卡尔曼滤波器和线性二次型最优制导律设计了主动雷达寻的最优制导系统,并进行了目标机动情况下的仿真验证。仿真结果表明,所设计的滤波器能够较准确地进行状态估计,状态估计值用于线性二次型最优制导律,改善了飞行器的导引特性和制导精度。
参考文献
[1] Williams D E, Richman J, Friedland B. Design of an integrated strapdown guidance and control system for a tactical missiles[C]. AIAA 1983-2169, 1983: 57-66.
[2] 李全运, 宋建梅.捷联寻的制导系统滤波器设计[J].兵工学报, 2005, 26(2):215-219.
[3] 付梦印, 邓志红, 张继伟. Kalman 滤波理论及其在导航系统中的应用 [M ]. 北京: 科学出版社, 2003.
[4] 周荻,慕春棣.被动式寻的导弹的运动跟踪变结构制导[J]. 航空学报, 1998, 19(2):179-184.
[5] Ford J J, Coulter A S. Filtering for precision guidance: the extended kalman filter[R] .USA: Defense Science & Technology Organization, 2001.
[6] Song T, Speyer J. A stochastic analysis of a modified gain extended Kalman filter with applications to estimation with bearings only measurements[J]. IEEE Transactions on Automatic Control, 1985, 30(10): 940-949.
[7] Marins J L. An extended Kalman filter for quaternion-based attitude estimation[D]. Monterey, California: Naval Postgraduate School, 2000.
[8] 王建栋,罗喜霜,张天桥.用于复合制导的最优中制导律研究[J].弹道学报,2002,14(2):44-47.
[9] Hull D G, Speyer J L, Burris D B. Linear-quadratic guidance law for dual control of homing missiles[J]. Journal of Guidance, Control, and Dynamics, 1990, 13(1): 137-144.
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
中学生数理化·高一版(2019年12期)2019-12-31 06:52:24
当代石油石化(2018年1期)2018-08-10 06:50:54
中国钢铁业(2018年6期)2018-07-26 06:55:00
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
小学科学(学生版)(2016年1期)2016-10-09 01:53:02
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09