智能机器人
——未来航天探索的得力助手
2018-05-26 02:26:24王燕波李晓琪
宇航总体技术 2018年3期
王燕波,李晓琪
(北京精密机电控制设备研究所,北京 100076)
0 引言
近年来,随着控制、信息、智能等技术的不断发展,机器人功能越来越强大,应用领域也不断扩大。作为“制造业皇冠上的明珠”的机器人,在制造业转型升级、智能制造技术的发展中发挥越来越重要的作用,同时也逐步深入到人类生活服务等各个方面。无论是技术研究还是产业发展,智能机器人都引起广泛的关注,行业需求越来越大。对于未来人类复杂、危险、不确定的航天探索活动,智能机器人必将发挥越来越重要的作用。
1 机器人发展历史回顾
拥有一个忠实于人类并为之服务的聪明伶俐的机器人“奴隶”自古以来都是人们的目标。1920年捷克作家雷尔·恰佩克在小说中创造出了机器人(robot)一词,原本是奴隶的意思,这成为机器人一词的起源。其实对机器人并没有一个完整确切的定义,而且随着技术的不断发展,尤其近年来信息及智能技术的发展,机器人所涵盖的内容越来越丰富,机器人的定义也不断地丰富和发展。
1954年,世界第一台编程机器人由美国人乔治·德沃尔制造。1959年,世界上第一台工业机器人由美国人英格伯格和德沃尔制造,标志着机器人历史的开始。随后,世界上第一家机器人制造工厂Unimate公司成立。工业机器人的应用降低了汽车工业的生产成本,工业机器人伴随着汽车工业的快速发展而发展,是工业大规模生产的典范,至今,汽车工业上下游仍然是工业机器人应用最多的领域。1978年 美国Unimation公司推出通用工业机器人PUMA,这标志着工业机器人技术已经完全成熟。PUMA至今仍然工作在工厂第一线。
起初工业机器人功能比较单一,主要用于替代人类从事重复的、繁重的、对一致性和精度要求比较高的大批量制造业。随着机器人传感感知、智能识别与控制、语音识别等技术的发展,机器人的功能更加多样,应用更为广泛,开始进入娱乐、医疗、教育、家庭等服务行业。
1999年,犬型机器人爱宝(AIBO)[1]由日本索尼公司推出,成为娱乐服务机器人进入普通家庭的开端。2002年,美国iRobot公司推出了吸尘器机器人Roomba[2],开启了家用服务机器人先河。它能在室内自行规划行进路线完成清扫工作,自动完成充电,是目前世界上销量最大、最商业化的服务机器人之一。
1987年国际标准化组织对工业机器人进行了定义:“工业机器人是一种具有自动控制的操作和移动功能,能完成各种作业的可编程操作机。”随着智能技术的发展,未来机器人的定义应该是机器+智能,它既有类人一样的脑系统(神经系统),具备智能感知、思考、分析、判断等智能行为能力,又有像人躯干四肢一样灵活的执行系统(机器功能)完成各种复杂动作,作为人类伙伴,与人类有更好的互动,协助人类完成各种复杂的生产生活活动。
2 机器人技术发展应用现状
目前,业界一般将机器人分为工业机器人和服务机器人两种。工业机器人是指应用于生产过程和环境的机器人,主要包括人机协作机器人和工业移动机器人。服务机器人是指除工业机器人以外的、用于非制造业并服务于人类的各种先进机器人,主要包括个人/家用服务机器人和公共服务机器人。
近年来,虽然机器人成为广泛关注的热门,技术发展也很快,但是机器人还没有像人们期望的那样功能强大,应用场合还受到诸多限制。目前,机器人主要在工业领域发挥作用,工业领域也主要用于汽车工业上下游、芯片生产等行业。由于技术的限制,工业机器人主要从事的工作还是搬运、焊接、打磨等重复性、模式单一的工作。在服务机器人领域,主要是扫地机器人、无人机等少数机器人产品得到大量商业推广和应用。
工业机器人在工作快速性、操作精度、一致性等方面超过人类,提高了生产效率和产品质量。但是,目前主流工业机器人存在结构笨重、缺乏本质安全性、在线感知能力低、智能程度低、与人互动能力差、后续使用维护成本高等缺点,大大限制了机器人在工业领域的应用。比如在精密装配、多产品混线、柔顺操作、非确定性操作等场合,传统工业机器人很难发挥作用,应用较少。因此,基于应用需求,得益于控制、信息和智能等基本技术的发展,工业机器人正在向智能协作型机器人、机器人智能柔性制造等技术方向发展。未来协作型工业机器人将具备本质安全、与人机交互友好、质量小、成本低、更智能化、多感知等特点,集成如智能识别等智能功能,具备拖动示教功能,实现制造工艺智能柔性改变,大大降低用户使用难度和使用成本。
服务机器人也是如此,虽然大家对智能服务机器人有很多美好的期待,由于智能等技术的限制,智能服务机器人商业应用还比较少。机器人智能程度比较低,对于复杂多变、不确定因素多的应用场景,机器人还达不到像人类那样在非确定环境智能分析判断执行的能力。而且,机器人执行部分效率还比较低,在大部分场合使用性价比不高。
目前,智能机器人技术进步与发展越来越快,仿人(或仿生)是智能机器人技术发展的终极目标。未来智能机器人主要在人工智能、生物机械电力结合、基于生命机理的驱动与能量转换等3大方向发展,且新技术不断取得突破,不远的将来,智能机器人会拥有人们期望的能力。
3 空间机器人应用现状
3.1 空间机器人定义
空间机器人(Space Robots)指的是用于代替或协助人类在太空中进行科学试验、出舱操作、空间探测等活动的特种应用服务机器人。相对于地球表面环境,太空环境非常恶劣,充满不确定性,航天员在空间中活动充满危险。研发功能强大、操作灵活、具备高度智能的空间机器人协助人类探索太空,是助推航天事业发展的一个重要技术领域。
根据不同的划分标准和原则,空间机器人有多种分类方法。按照用途的不同,空间机器人大致可以分为在轨服务机器人和星球探测机器人两大类。其中,在轨服务机器人分为舱内/外服务机器人和自由飞行机器人。舱内/外服务机器人一般是指安装或工作于空间站,协助航天员完成各种任务的机器人系统,最典型的是国际空间站的加拿大机械臂,也包括安装在航天飞机上的大型机械臂。自由飞行机器人一般是指飞行器安装机械臂组成用于空间在轨服务的机器人系统。星球探测机器人一般是指执行地外星体探测的机器人系统,如月球车、火星车等。
3.2 国外在轨服务机器人发展概况
近些年,美国、日本、加拿大、德国、欧空局等发达国家或组织开展了一系列空间机器人项目研发和空间实验验证。
3.2.1 美国空间机器人发展概况
20世纪 80年代,随着美国第一个空间站的升空及新的空间站研制计划的启动,美国开始重视自主在轨服务的发展,其空间机器人的研究主要开展了飞行遥控机器人服务者 (Flight Telerobotic Servicer, FTS)[3]计划、空间遥操作机器人项目(Space Telerobotics Program, STP)[4]和“轨道快车”(Orbital Express, OE)[5]计划等项目。
1992年,NASA 启动了 STP 项目。STP 计划主要包括3个研究任务和应用领域:行星表面考察、科学载荷维护以及在轨服务与组装。STP计划中,自由飞行空间机器人技术是在轨服务与组装的研究重点之一。
“轨道快车”计划研制了ASTRO与 Next Sat两颗卫星,如图1 所示。ASTRO 装载有燃料传输系统、轨道更换单元、对接机械臂系统、交会接近敏感器和捕获系统,其机械臂系统用于锁定 Next Sat 同时实现对接,或者用于向Next Sat传输需要更换的硬件。Next Sat 用于模拟故障卫星。 2007 年3月 8 日,ASTRO 和 Next Sat 发射升空,成功完成了自主停靠和捕获试验以及燃料传送和组件更换试验。“轨道快车”计划是空间机器人技术和自主在轨服务技术发展史上的重要里程碑。

图1 “轨道快车”计划示意图Fig.1 Orbital Express program
Robonaut的研制工作开始于1997年,由NASA约翰逊空间研究中心(JSC)负责组织研发工作,目的是研制类人机器人航天员,协助航天员完成空间站工作,尤其是危险环境下的工作。2006年,第一代样机Robonaut 1 研制成功。Robonaut 1的研制成功引起了通用公司(GM)兴趣。2007年,JSC、GM和海洋工程局(Oceaneering)联合开展Robonaut 2的研制,2010年完成 Robonaut2 样机研制。2011年2月24日,Robonaut 2搭载航天飞机STS-133任务进入国际空间站,进行空间测试实验。
Robonaut 2是固定基座的人形双臂机器人,共有42个自由度。有两只手臂,每个手臂有7个自由度,每个灵巧手有12个自由度,头颈部有3个自由度,腰部有1个自由度。头部装有4个视觉摄像机,2个组成一对双目视觉提供视觉图像信息,2个备用。Robonaut 2嘴部周围布有15个红外摄像机用于深度感知。全身集成有350个各种传感器和38个PowerPC微处理器。Robonaut 2采用了遥操作和自主控制相结合的控制模式,本体每台造价250万美元。
Robonaut 2是第一个进入太空的人形机器人。未来,Robonaut 2可能会带攀爬功能执行更复杂的舱内外工作,也可能装上轮子,变成其他行星探测机器人。Robonaut 2虽然开展了空间实验测试,但是并没有进行特殊空间环境适应性设计,需要穿上宇航服才能适应空间站工作环境,如图2和图3所示。

图2 Robonaut 2在国际空间站进行测试试验Fig.2 The Robonaut 2 performs testing experiments in international space station
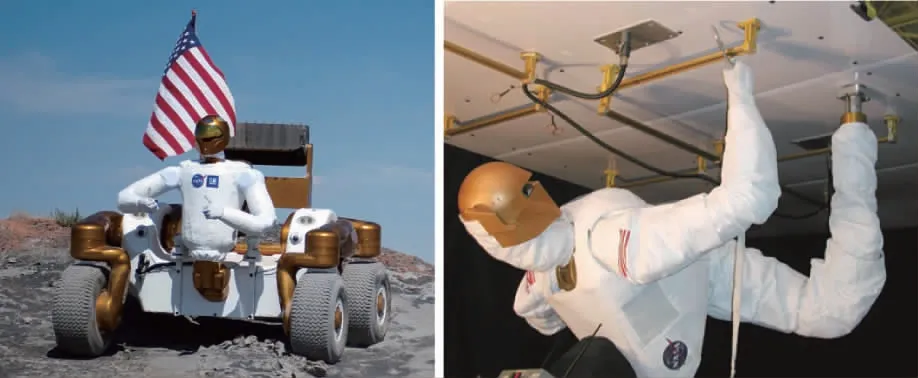
图3 Robonaut 2未来发展设想Fig.3 Imaginary working scenario of Robonaut 2
3.2.2 日本空间机器人发展概况
日本于20世纪 80 年代开始了空间机器人的研究。凭借领先世界的机器人技术,日本空间机器人的发展始终处于世界前列,主要研究成果有日本实验舱遥控机械手 (Japanese Experiment Module Remote Manipulator System, JEMRMS)[6]、工程实验卫星-7(Experimental Test Satellite-VII, ETS-VII)[7]和轨道维护系统(Orbital Maintena-nce System, OMS)[8]等。
20世纪90年代初,日本为国际空间站上的日本实验舱(Japanese Experiment Module, JEM)开发了机械臂JEMRMS。JEMRM由主臂(Main Arm, MA)和小巧手(Small Fine Arm, SFA)组成,其结构如图4和图5所示。MA 与 SFA 均是6自由度配置。MA 装载了视觉装置和末端抓取装置,主要用来处理较大载荷以及对 SFA进行粗略定位。SFA 的载荷包括末端工具、摄像机及力和力矩传感器。SFA 主要用于精密操作,包括更换实验舱外的轨道更换单元(Orbital Replacement Units, ORU)。

(a)JEMRMS空间试验 (b)JEMRMS地面测试试验图4 日本JEMRMS空间机器人Fig.4 The Japanese JEMRMS space robot
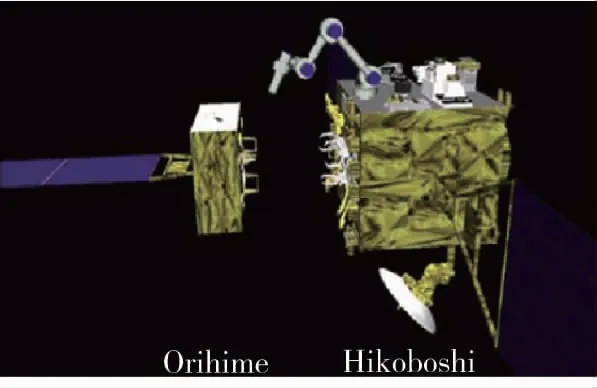
图5 日本ETS-VII空间机器人示意图Fig.5 The Japanese ETS-VII space robot
为了实现全自主的空间机器人技术与交会对接技术,日本国家空间发展局(National Space Development Agency of Japan, NASDA)从1992 年开始了工程实验卫星-7 的研制。它包含两颗卫星:作为追逐者的 Hikoboshi 和作为目标星的Orihime。Hikoboshi 携带的 6 自由度机械臂长约 2m,其末端位置和姿态精度分别为 10mm和1°,末端位置和姿态重复精度可达 2.5mm和 0.13°,末端最大速度为 50mm/s和5(°)/s。ETS-VII 在 1997 年发射升空,并一直工作到 1999 年 11 月。在两年多的时间里,ETS-VII 成功完成了以下实验:采用遥操作方式利用机械臂对 ORU 进行更换,通过对跟踪曲面以及螺钉的插拔操作验证了机械臂的柔顺控制以及力控制,利用机载视觉捕获漂浮小球,双边的力反馈控制。ETS-VII 是世界上首颗带有机械臂的卫星,因此它是世界上第一个真正的自由飞行空间机器人系统,但是 ETS-VII 仍然是以遥操作为主,自主性能有所欠缺。
2004年,日本国家信息和通信技术研究中心(NICT)提出了轨道维护系统(Orbital Mainte-nance System, OMS),以处理逐渐威胁现有卫星在轨寿命的太空垃圾,如图6所示。OMS 的主要任务为卫星在轨监测、维护、营救以及轨道碎片与废弃卫星的清理等。截至目前,该项目正处于关键技术研究阶段,还没有开展相应空间演示试验。
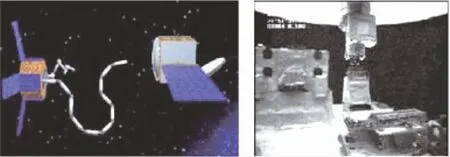
图6 OMS在轨维修Fig.6 The OMS performs on-orbit maintenance
3.2.3 加拿大空间机器人发展概况
加拿大是最早将机械臂应用于空间作业的国家。加拿大先后为航天飞机和国际空间站研制了两代空间机械臂:航天飞机遥控机械臂系统(SRMS)[9]与国际空间站上的空间站遥控机械臂系统(SSRMS)[10]。
SRMS 是世界上第一个实用的空间机械臂系统。SRMS 配置为 6 个自由度,长 15.2m,总质量为431kg。SMRS 在移动14515kg的负载时末端速度可达 0.06m/s,最大可操作载荷可达 265810kg,其末端位置和姿态精度可达5cm和1°。SRMS在 1981 年随哥伦比亚号航天飞机完成首次飞行,在 1993 年的哈勃望远镜的维修任务中取得了巨大成功,如图7所示。

图7 加拿大SRMSFig.7 The Canadian SRMS
SSRMS 比 SRMS 更完善、更灵活。SSRMS 配置为 7 个自由度,全部展开时长 17.6m,总质量为1800kg,可操纵的负载高达 116000kg,其末端操作精度在空载时可达 6.4mm。
SSRMS于2002 年添加到空间站移动运输装置(Mobile Transporter,MT)之上。当 SSRMS 安装在活动基座系统(Mobile Base System,MBS)上时,SSRMS可以支撑航天员的舱外活动,具有工具与设备的存放装置、手脚的固定装置以及摄像机等设备。SSRMS完成了龙飞船和天鹅号飞船与空间对接的工作,携带航天员完成太阳能帆板等部件的维修更换,如图8所示。
图8 空间站机械臂SSRMSFig.8 The SSRMS space manipulator
3.2.4 德国空间机器人发展概况
作为世界工业强国,德国一直注重空间机器人的研究。到目前为止,德国主要的研究项目包括:机器人技术实验(Robot Technology Experiment on Spacelab D2-Mission, ROTEX)[11]、试验服务卫星(Experimental Servicing Satellite, ESS)[12]、空间系统演示验证技术卫星(Technology Satellite for Demonstration and Verification of Space Systems, TECSAS)和德国在轨服务计划(Deutsche Orbital Servicing Mission, DEOS)等。
ROTEX 是德国在空间机器人研究进程中的第一次尝试。ROTEX 包含多种操作模式,不仅有在轨遥操作、地面遥操作,还包括地面离线编程操作和通过智能人机接口的在线遥操作。1993 年,ROTEX 在哥伦比亚号航天飞机的密封实验舱中进行了实验,包括机械装配、插拔各种电源接头和抓取漂浮物体等。ROTEX 在空间微重力环境中通过遥操作捕获了漂浮小球,这为通过遥操作进行在轨服务开创了先河,如图9所示。
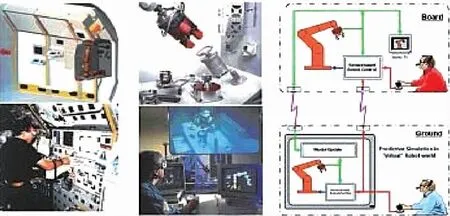
图9 ROTEX遥操作示意图Fig.9 The tele-operation of ROTEX
为了在轨验证空间机器人软、硬件方面的关键技术,并改进空间维修服务系统,德国提出了 TECSAS 计划。TECSAS 计划预期研制一个可接受在轨服务的目标航天器和一个装载有 7自由度机械臂与捕获系统的服务航天器。但是由于项目的重新定位,TECSAS 于 2006 年 9 月停止,取而代之的是 DEOS 项目。DEOS 的研究重点集中在导航、制导和非合作目标的捕获,当然也包括捕获合作目标后实施轨道机动以及拖离轨道等任务。由于经费原因,该项目还没有进行空间实验。
从20世纪80年代末起,德国宇航中心(DLR)开始研制轻型机器人臂(LWR)。第1代LWR[13]采用碳纤维材料,采用步进电机和行星轮减速箱,总质量为14.5kg,最大负载能力为7kg,传动比达到1∶600。LWR第2代机械臂[14-15]共7 个自由度,布置方式为旋转-俯仰-侧摆-俯仰-旋转-俯仰-旋转,采用机电一体化关节设计思想,在关节内部集成驱动、减速、制动检测部分,结构紧凑。机械臂质量为17kg,最大负载能力为8kg。DLR第3代轻型臂[16]有7 个自由度,有对称式和非对称式布置两种关节的构成方式,其中非对称式布置有利于机械臂折叠。腕关节采用球状结构,增加了机械臂的灵活性,如图10所示。
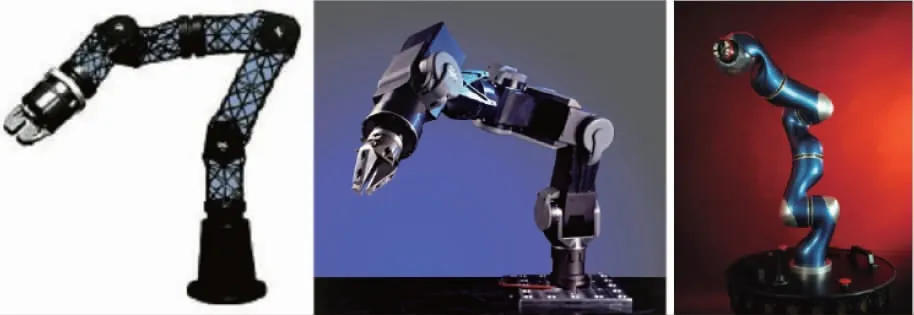
图10 DLR 研制的3 代轻型臂Fig.10 Three generations LWR of DLR
3.2.5 欧空局空间机器人发展概况
欧空局(European Space Agency, ESA)的主要空间机器人研究项目包括:欧洲机械臂(European Robotic Arm, ERA)[17]和 Jerico机械臂[18]。
ERA 原本为HERMES 计划而研制,但后来被安装于国际空间站的俄罗斯部分。该臂长 7m,具有 7 个自由度,两端各有一个末端机械手,利用这两个末端机械手可以实现机械臂在空间站上攀爬移动。ERA 主要用来完成国际空间站的集成与装配、操作大小各种设备、交换各种可更换单元、监测空间站的表面情况以及支持俄罗斯航天员的舱外活动,如图11所示。

图11 欧洲机械臂ERAFig.11 European Robotic Arm
Jerico 机械臂由欧空局和意大利空间局(Italian Space Agency, ISA)共同研制,Jerico 长 1.5m,具有 7 个自由度。Jerico于 1998 年发射升空并安装在空间站的 SPEKTR 舱。
3.3 国外星际探测机器人发展概况
星球探测机器人是指能够执行月球、火星等地外星球表面探测任务的智能无人系统,可以在地外星体完成探测着陆地点、科学仪器放置、收集样品进行分析等各种任务。与其它用途的空间机器人相比,星球探测机器人应具有更强的自主性,能够在无人干预或较少干预的情况下独立完成各项任务。
20世纪60年代末和70年代初,苏联和美国分别发展了无人月球车和有人驾驶的月球车,这些月球车的运行距离达到40km。在月球表面,要面对的特殊挑战是多尘埃、低重力和接近真空的空间环境。当时,美国的月球漫游车(LRV)和苏联的月球车-1(Lunokhod)的尺寸和质量都较大,长度约2m,质量超过700kg。苏联的月球车-1是世界上第一个着陆到月球表面的无人月球车,它是由1970年11月发射的月球-17 (Luna-17)探测器送到月球表面的,登月点位于北纬38° 18′、西经35°的雨海。它行驶了10.5km,考察了约80000m2的月球表面。
进入21世纪,随着航天技术的发展,月球及行星探测的广度和深度也不断加大。世界主要航天大国纷纷提出新的探测计划,美国已开始实施重返月球计划。欧洲、日本、印度等都制定了月球和行星探测计划。
火星探测也是航天技术发展的重要方向,目前美国处于绝对领先地位。美国分别在1997年、2003年、2011年发射了索杰纳号、勇气号、机遇号和好奇号火星车,开展了一系列火星探测活动与试验,如图12和图13所示。
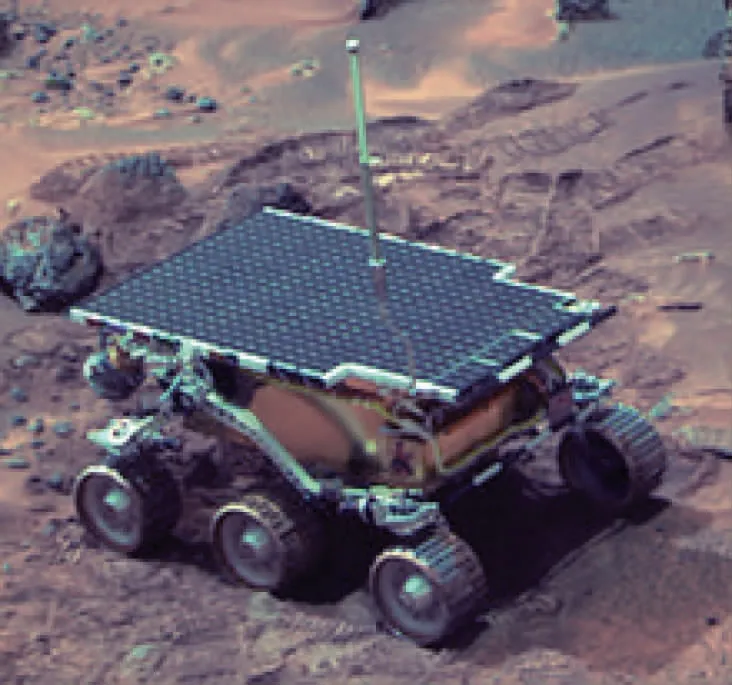
图12 索杰纳号火星车Fig.12 The Sojourner Mars vehicle

图13 机遇号火星探测机器人Fig.13 The Opportunity Mars vehicle
好奇号火星探测器是NASA研制的一台探测火星任务的火星车,于2011年11月发射,2012年8月成功登陆火星表面,如图14所示。它是美国第7个火星着陆探测器、第4台火星车,也是世界上第一辆采用核动力驱动的火星车,其使命是探寻火星上的生命元素。项目总投资26亿美元,是截至2012年最昂贵的火星探测项目。
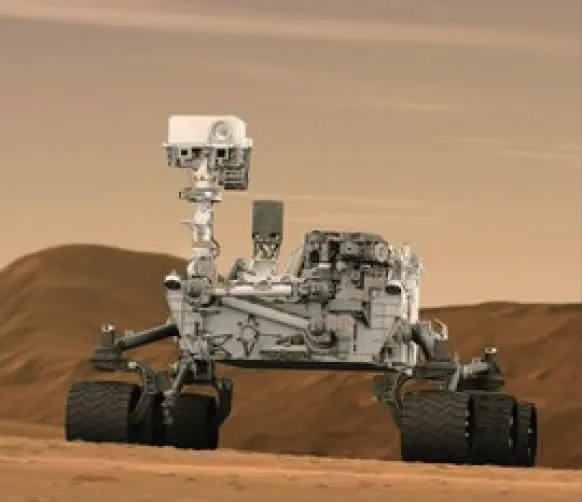
图14 好奇号火星车Fig.14 The Curiosity Mars vehicle
3.4 中国空间机器人发展概况
中国空间机器人研究起步较晚,但是随着中国综合国力的增强和航天技术的快速发展,在空间机器人领域,中国也开展积极探索和研究,完成了多项空间验证实验,多项关键技术取得突破,与国际先进水平差距逐渐缩小。
2013年中国发射了第一台空间机械臂,并完成了一系列空间操作实验,标志着中国空间机器人技术进入世界先进水平行列。2016年6月25日,由中国运载火箭技术研究院主持研制的空间碎片主动清除空间机器人搭乘长征7号运载火箭进入轨道,完成了利用空间机械臂进行空间碎片主动清除及非合作目标探测与抓捕实验,取得圆满成功。
2016年中国进行了国际首次人机协同在轨维修技术试验,该项试验主要面向航天设备在轨组装及拆卸任务,探索人机协同完成在轨维修典型作业,为空间机器人在轨服务积累经验。2016年10月19日,天宫二号与神舟十一号对接后,航天员与随天宫二号发射入轨的机械手协同完成了拿电动工具拧螺钉、拆除隔热材料、在轨遥操作等科学试验,如图15和图16所示。该项目由哈尔滨工业大学与中国空间技术研究院、北京理工大学共同完成。

图15 天宫二号机械臂灵巧手旋拧操作试验Fig.15 The dexterous hand in Tiangong No.2 performs the screwing experiment

图16 天宫二号机械臂系统Fig.16 The space manipulator systems in Tiangong No.2
玉兔号是中国首辆月球车,属于星际探测机器人,和着陆器共同组成嫦娥三号探测器。玉兔号月球车设计质量为140千克,以太阳能为能源,能够耐受月球表面真空、强辐射、-180°~150°极限温度等极端环境。玉兔号配备了全境相机、红外成像光谱仪等多种探测仪器。移动分系统采用轮式、摇臂悬架方案,共有了6个轮子,具备前进、后退、转向及一定的爬坡越障能力。玉兔号前端安装了一条4个自由度机械臂,可以完成月球表面近距离探测和标本采集任务,如图17所示。
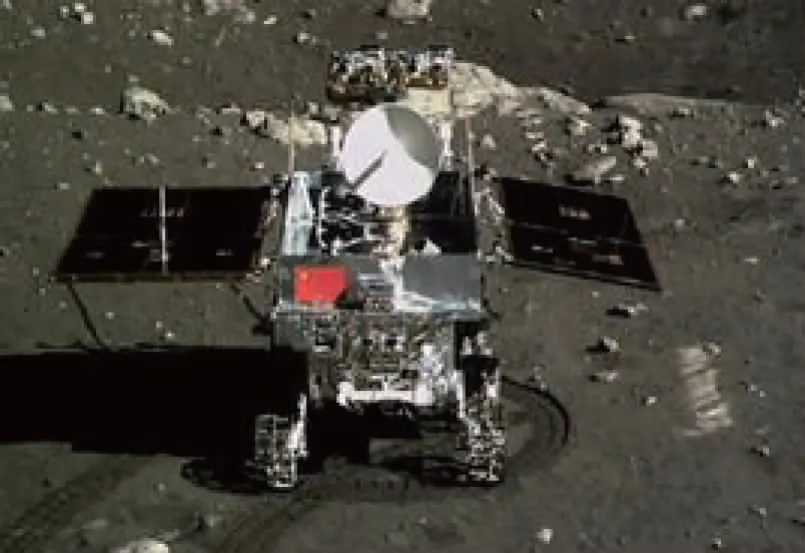
图17 玉兔号月球车Fig.17 The YuTu lunar vehicle
2013年12月2日1时30分,中国在西昌卫星发射中心成功将嫦娥三号探测器送入轨道。2013年12月15日4时35分,嫦娥三号着陆器与巡视器分离,玉兔号巡视器顺利驶抵月球表面。2014年1月25日凌晨,嫦娥三号月球车进入第二次月夜休眠。2016年7月31日晚,玉兔号月球车超额完成任务,停止工作。玉兔号预期服役3个月,超长服役两年多,一共在月球上工作了972天,玉兔号为中国在月球上留下的第一个足迹,意义深远。
4 空间机器人未来技术与应用发展趋势
空间机器人在原理技术上与地面机器人相同。但是,空间机器人是在空间环境中活动的,空间环境和地面环境差别很大,空间机器人工作在微重力、高真空、超低温、强辐射、照明差的环境中,需要有很强的空间环境适应性。空间操作任务往往是复杂不确定的,需要空间机器人具备更强的自主智能工作能力。
各国在空间机器人技术有了一定突破,但都处于技术实验验证阶段。已开展空间实验的空间在轨服务机器人,目前主要操作控制方式还是遥操作,自主智能工作能力不足,执行还是简单的移动抓取操作,达不到有效执行复杂空间任务和大规模实际应用的期望技术水平。
随着空间领域技术和应用的快速发展,未来深空探测、载人登月、空间在轨服务等空间大型工程的开展,对空间这种环境复杂危险、不确定因素多的场合,智能机器人将是人类最得力的助手。未来空间机器人不但要具有适应空间及地外星体各类复杂环境、高可靠性等特点,还要具备在复杂多变、非确定环境中实现智能感知、精细操作、柔顺操作、多级协同、自主决策与控制等工作能力,逐步具备完成空间在轨抓取、维修、维护、建造,以及地外星体探测与基地建造等复杂空间任务的能力。
为满足未来航天任务需求,空间机器人还需要开展多方面关键技术研究,解决一系列技术与工程问题。空间机器人未来发展关键技术主要包括空间环境适应性、智能自主操作、精细操作、灵巧柔顺操作、多机器人协同、多机器人智能集群、智能识别、自主智能分析决策、更高效率的驱动执行机构、新型柔性软体机器人等方面。
5 结论
智能机器人要真正强大并实用化,涉及到智能、机械、控制、材料、能源等各种技术的全面进步与发展,并依托于智能、物理等基础理论的突破。虽然未来充满希望,但过程也将会曲折艰辛,并非一两项技术突破就会产生突飞猛进的飞跃。
仿人(仿生)是机器人终极发展方向,体现在生命系统和机电系统的融合、基于生命机理的驱动与能量转换、基于生命机理的智能3个方面,随着人工智能、新材料、新能源等技术的发展,智能机器人能力将越来越强大。
智能机器人必将广泛应用到人类生产生活的各个方面,成为人类最得力、最忠实的助手。智能机器人也必将在航天这个特殊行业发挥更重要的作用,协助人类探索浩瀚无垠的太空。
参考文献
[1] 博言.数字化时代的宠物——索尼智能机器狗Aibo[J].电子世界,2001(2):9-10.
[2] Jones J L. Robots at the tipping point: the road toiRobot Roomba[J]. IEEE Robotics & Automation Magazine, 2006, 13(1): 76-78.
[3] Andary J F, Hinkai S W, Watzin J G. Design concept for the Flight Telerobotic Servicer (FITS) [R]. USA: NASA Goddard Space Flight Center, 1988:391-396..
[4] NASA Technical Reports Server. NASA Space Telerobotics Program [EB/OL]. http://ranier. hq. nasa. gov/telerobotics_page/telerobotics.shtm,1998.
[5] Friend R. Orbital Express Program Summary and Mission Overview [C]. Proceedings of Sensors and Space Applications II, Florida, USA, March, 2008:695803.1-695803.11.
[6] Japan Aerospace Exploration Agency. Japanese Experi-ment Module Remote Manipulator System [EB/OL]. http://kibo.jaxa.jp/en/about/kibo/rms/,2008-08-20.
[7] Oda M. Space Robot Experiments on NASDA’s ETS-VII Satellite [C]. Proceedings of the 1999 IEEE International Conference Robotics andAutomation, Detroit, Michigan, May, 1999: 1390-1395.
[8] NICTWeb. More about OMS [EB/OL]. http://sstg.nict.go.jp/OLIVe/Detail_E.html, August, 2010.
[9] Wikipedia Web.Canadarm [EB/OL]. http://en.wikipedia.org/wiki/Canadarm,June, 2007.
[10] Wikipedia Web. Canadarm2 [EB/OL].http://en.wikipedia.org/wiki/Canadarm2,June, 2010.
[11] Settelmeyer E, Lehrl E, Oesterlin W, et al. The Experimental Servicing Satellite ESS [C]. Proceedings of the 21stISTS Symposium, Omiya, Japan, 1998.
[12] DLR Web. Ongoing Space Robotics Missions: TECSAS/DEOS [EB/OL].http://www.dlr.de/rm/en/desktopdefault.aspx/tabid-3825/5963_read-8759/, 2001.
[13] Hirzinger G, Butterfass J, Fischer M, et al. A mechatronics approach to the design of light-weight arms and multifingered hands[C]. Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco,2000:46-54.
[14] Hirzinger G, Albu-Schaffer A, Hahnle M, et al. On a new generation of torque controlled light-weight robots[C]. Proceedings of the IEEE International Conference on Robotics and Automation, Seoul, 2001, 4:3356-3363.
[15] Hirzinger G, Butterfass J, Grebenstein M, et al. Space Robotics-Driver for a new mechatronic Generation of light-weight arms and multifingered hands[C]. Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics Proceedings, Como, 2001:1160-1168.
[16] Hirzinger G, Sporer N, Albu-Schaffer A, et al. DLR’s torque-controlled light weight robot III-are we reaching the technological limits now?[C]. Proceedings of the IEEE International Conference on Robotics and Automation, Washington, 2002, 2:1710-1716.
[17] ESA Web. ERA: European Robotic Arm [EB/OL]. http://www.esa.int/esaHS/ESAQEI0VMOC_iss_0. html, 2009-02.
[18] Didot F, Dettmann J, Losito S, et al. JERICO: A demonstration of autonomous robotic servicing on the Mir space station[J]. Robotics and autonomous systems, 1998, 23(1-2): 29-36.
猜你喜欢
军事文摘(2024年6期)2024-02-29 10:00:22
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:34
军事文摘(2022年18期)2022-10-14 01:34:16
当代工人(2020年8期)2020-05-25 09:07:38
小溪流(画刊)(2017年12期)2018-01-10 16:07:29
科技知识动漫(2016年8期)2016-07-29 20:40:09
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25 00:41:49
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08