基于几何活动轮廓模型的SAR图像海岸线检测
2018-05-23 04:37:57康艳秋魏雪云
江苏科技大学学报(自然科学版) 2018年2期
康艳秋,魏雪云
(江苏科技大学 电子与信息学院,镇江 212003)
准确而快速地确定海岸线的位置、走向和轮廓,在海岸带环境保护、海洋资源管理等方面都有着重要的作用.受海岸线水陆边界特性的影响,在SAR图像中提取海岸线实际上是一个图像分割的过程.这类方法较多,最经典的图像分割方法是一类边缘微分算子,如Sobel算子、Canny算子以及Roberts算子等.虽然这些边缘微分算子算法简单,运算速度较快,但对噪声比较敏感,边缘定位不够准确,缺乏普遍适用性.为了从SAR图像中检测出完整、连续的海岸线,许多研究者作了许多积极的探索,并且也提出了一些行之有效的提取方法.
文献[1]中提出了活动轮廓模型(active contour model,ACM)[1],又称为Snake模型.虽然这种方法能获得连续的海岸线,但是它对初始轮廓比较敏感,而且无法自适应处理边界拓扑关系.文献[2]中提出边界追踪算法,此算法得到的海岸线依赖于对图像中陆地、海洋的分离,因此存在相当大的局限性,一般在精度要求不高的情况下应用.文献[4]中根据文献[3]中给出的界面传播理论,提出了水平集算法.此算法沿袭了活动轮廓法的特点.在此算法中,同样需要给出初始轮廓线,但对初始轮廓线位置的要求比活动轮廓法低.另外由于二维曲线被镶嵌到三维曲面中去,使此方法中数值计算的求解稳定,存在唯一解.但是由于算法在三维曲面中迭代,导致计算量大、复杂度高.文献[5-6]中提出利用Mumford-Shah泛函进行边界检测.该方法大大降低了对初始轮廓位置的限定,而且轮廓曲线具有拓扑自适应能力,可以自动分离或合并,无需额外处理.但是由于在找边界的同时去掉了图像的噪声,虽然这提高了抗噪性能,但降低了边界定位的精度,导致边界定位不准确,而且噪声越大,边界定位的精度越差.文献[7]中提出了一种利用小波变换提取SAR图像海岸线的方法,该方法用小波变换提取海岸线的初始轮廓,再结合块跟踪、局部边缘选择方法以及活动轮廓模型取得了较好的效果,但过程和算法相对复杂.
针对上述问题,文中提出一种基于几何活动轮廓模型的海陆分界线检测方法.该方法结合全局的区域光滑信息作为曲线演化的收敛条件,有利于解决海岸线弱边界的问题.
1 几何活动轮廓模型
1.1 传统的几何活动轮廓模型
几何活动轮廓模型是在Snake模型的基础上发展起来的.根据能量泛函的定义,几何活动轮廓模型基本可以分为边界模型、区域模型.最典型的边界模型为测地几何活动轮廓模型[8],该模型较好地解决了Snakes模型对初始条件敏感、无法自动处理拓扑变化等不足,其能量泛函为[8]:
(1)
式中:C为参数化平面曲线;I为已知图像;g为边界停止函数.
(2)
式中,Gσ是方差为σ的高斯核函数.g在图像梯度较大的地方趋于0,在图像梯度较小的地方趋于1.曲线向g趋于0的位置演化,可以有效提取出目标边界.基于水平集方法的测地几何活动轮廓模型能在演化过程中自动处理曲线拓扑变化.文献[9]中也提出了类似的边界模型.事实上,对于低对比度目标边界边缘检测算子不收敛于0,因此演化曲线可以穿越边界.而且边缘检测算子对噪声敏感,造成边界模型的演化曲线容易陷入局部极值,从而产生冗余轮廓.
相对边界模型而言,区域模型利用活动轮廓内部和外部的全局区域信息定义能量泛函,没有使用基于图像梯度的边缘检测算子,更利于SAR图像海岸线检测.基于此,文中方法采用基于区域的几何活动轮廓模型进行SAR图像的海岸线检测.假定图像由目标和背景两个同质区域组成,能量泛函定义[10]:
(3)
式中:t1、t2为大于零的常数,用来控制曲线内部和外部能量的权重;c1、c2分别为图像在轮廓划分区域内外的灰度平均值;Ω为目标图像域.
可以看出该模型中结合了图形的全局信息,其能量函数和图像的梯度无关,既适用于边界光滑图像边缘的提取也适用于边界不连续的.但是不适用于目标和背景灰度区分不明显的图像.此外,尽管边缘检测对演化曲线的初始位置不敏感,但是演化速度仍然依赖于演化曲线的初始位置,而且它必须周期性重新初始化水平集函数,一定程度上增加了边缘检测的时间及计算复杂度.
1.2 几何活动轮廓模型的改进
基于区域的几何活动轮廓模型中常采用符号压力函数(signed pressure function,SPF)[11]作为边界停止函数:
(4)


(5)
式中:加权函数fLBF为逼近曲线内外部区域图像局部强度的光滑函数f1和f2的组合函数.则相应的水平集函数演化方程可以写成:

SPFLBF(I(x))·φx∈Ω
(6)
文中几何活动轮廓模型的水平集演化过程如图1,具体包括以下步骤:
(1) 初始化水平集函数φ为二值函数.
(7)
式中:k为大于0的常数;Ω0为目标图像域Ω的子集;αΩ0为区域Ω0的边界;
(2) 利用LBF模型中f1、f2加权函数组合fLBF以及SPFLBF计算出最简的水平集演化方程.

(8)
(3) 当φ>0时,令φ=1;否则令φ=-1.
(4) 用SBGFRLS水平集方法[11,14]计算出
(9)

(5) 检验φ是否收敛于零,如果不收敛,则返回步骤(2).
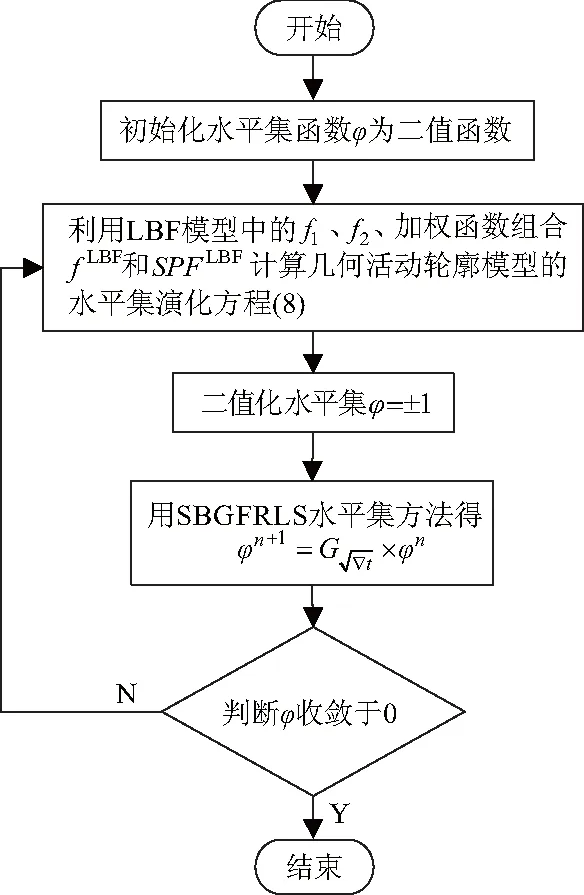
图1 水平集演化过程Fig.1 Evolution process of level set
文中的几何活动轮廓模型结合了全局的区域光滑信息作为曲线演化的收敛条件,可以有效解决斑点噪声对SAR图像海陆边界线分割的影响.对符号压力函数的改进,可以解决海岸线弱边界问题.此外,在水平集演化的过程中用SBGFRLS水平集方法可以获得较快的收敛速度.文中选用简单的网格采样点获得海岸线边界的初定位作为曲线演化的初始轮廓,不仅可以减少算法迭代的时间,而且在一定程度上可以减少模糊边界带来边界泄露的可能,从而可以获得比较准确的检测结果.
2 SAR图像海岸线检测
2.1 初始轮廓的获取
为了减少SAR图像中斑点噪声对海岸线检测结果的影响,文中先对SAR图像进行预处理.为了缩短几何活动轮廓模型演化时间,文中用若干小圆盘作为SAR图像海岸线的初始轮廓,如图2.具体过程为采用一个数值矩阵和经过预处理的目标图像进行卷积处理;在经卷积处理后的SAR图像中用网格采样点函数[15]生成网格采样点;在得到的网格中创建半径为9个像素的圆盘.
图2 初始轮廓Fig.2 Initial contour
2.2 海岸线的精确提取
海岸线精确提取过程如图3,步骤如下:

图3 海岸线提取过程Fig.3 Extraction process of coastline
读取SAR图像,并进行预处理;对SAR图像进行卷积处理、生成网格采样点,然后在网格采样点中画多个小的圆盘作为海岸线的初始轮廓;将海岸线初始轮廓作为几何活动轮廓模型的输入,利用改进的符号压力函数作为几何活动轮廓模型的边界停止条件,并利用高斯滤波器快速初始化二值化的水平集函数,将得到的海岸线进行矢量化处理,得到连续的海岸线.
3 实验与分析
将文中的方法、改进的Canny算子方法[16]、边界追踪算法[2]及一种传统的几何活动轮廓模型方法[17]进行比较.以人工方式标注海岸线,并定义如下:错误像素为漏检像素与误检像素之和;正确像素为检测结果与误检像素之差;错误率为错误像素个数与人工标注像素个数之比;正确率为正确像素个数与人工标注像素个数之比.一个理想的检测方法必须要有高正确率和低错误率.
改进的Canny算子方法能检测出连续的边缘点,但是误检像素较多,导致较高的错误率;边界追踪算法、传统的几何活动轮廓模型方法误检像素、漏检像素都较多,导致较高的错误率;文中方法具有较高正确率及较低错误率,检测结果较好,详见表1.
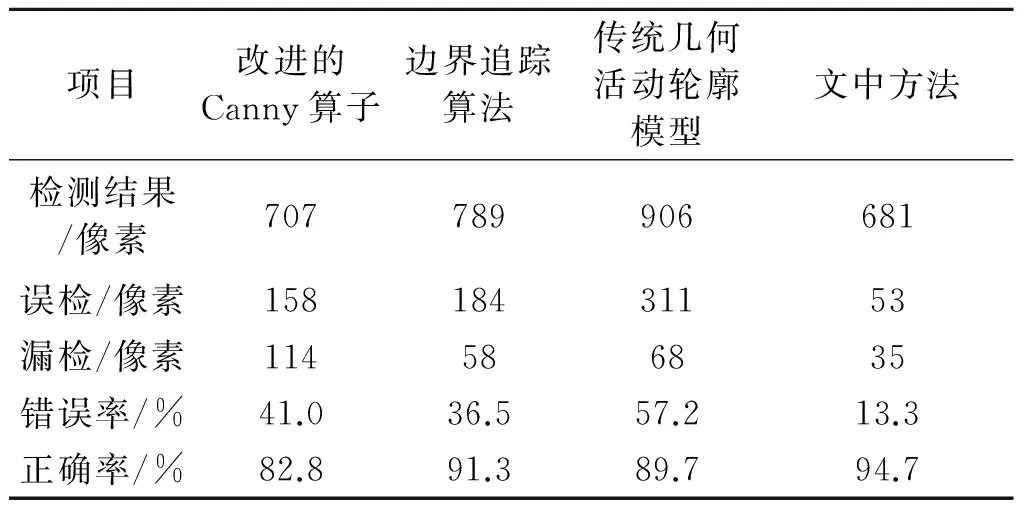
表1 算法检测性能比较Table 1 Algorithm detection performance results
注:海岸线有663个像素.
传统的几何活动轮廓模型方法和文中的几何活动轮廓模型的迭代次数和运算时间的比较,对于大小为497×304的图像,传统的几何活动轮廓模型方法迭代1 212次,运算时间为267.975 s;而文中方法由于用小圆盘作为海岸线的初始轮廓减少了迭代次数及检测时间,文中方法迭代次数为177次,运算时间为44.415 s .
为了更进一步直观观察检测效果,图4为海岸线检测的局部放大结果.从目视角度,仍能清楚看出改进的Canny算子方法、边界追踪算法、传统几何活动轮廓模型方法的检测出的海岸线存在较大的检测误差,而文中算法得到的海岸线检测结果较为理想.

图4 局部海岸线检测结果Fig.4 Detection results of local coastline
4 结论
为了快速有效从SAR图像中检测出海岸线,文中提出了一种基于几何活动轮廓模型的SAR图像海岸线检测方法.通过分析海岸线的检测结果,可以得出以下结论:
(1) 通过对SAR图像的预处理,减小了斑点噪声对海岸线检测结果的影响;
(2) 对SAR图像进行卷积处理、生成网格采样点,然后在所述的网格采样点中画多个小的圆盘作为海岸线的初始轮廓,实现了海岸线的粗定位,减少了水平集演化迭代的次数;
(3) 利用结合区域信息的改进符号压力函数作为几何活动轮廓模型的边界停止条件并对海岸线进行精确提取,可以更加有效解决SAR图像中海岸线弱边界问题,使得检测出的海岸线更加准确.
大量实验检测数据表明,文中方法不仅能有效的检测出SAR图像中的海岸线,而且与其他相关海岸线检测方法相比,其迭代次数和检测准确度都得到了进一步提升,显示出该方法的有效性.
参考文献(References)
[ 1 ] KASS M, WITKIN A P, TERZOPOULOS D. Active contour models[J]. International Journal of Computer Vision, 1987, 1(4):321-331.
[ 2 ] LEE J S, JURKEVICH I. Coastline detection and tracing in SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 1990(4): 662-668. DOI:10.1109/tgrs.1990.572976.
[ 3 ] OSHER S, SETHIAN J A. Fronts propagating with curvature-dependent speed: algorithms based on Hamilton-Jacobi formulations[J]. Journal of Computational Physics, 1988, 79(1): 12-49. DOI:10.1016/0021-9991(88)90002-2.
[ 4 ] MALLADI R, SETHIAN J A, VEMURI B C. Shape modeling with front propagation: a level set approach[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1995, 17(2): 158-175. DOI:10.1109/34.368173.
[ 5 ] TSAI A, YEZZI A, WILLSKY A S. A curve evolution approach to smoothing and segmentation using the Mumford-Shah functional[C]∥Proceedings IEEE Conference on Computer Vision and Pattern Recognition.[S.l.]:IEEE,2000:119-124.DOI:10.1109/cvpr.2000.855808.
[ 6 ] TSAI A, YEZZI A, WILLSKY A S. Curve evolution implementation of the Mumford-Shah functional for image segmentation, denoising, interpolation, and magnification[J]. IEEE Transactions on Image Process, 2001,10(8):1169-1186.DOI:10.1109/83.935033.
[ 7 ] NIEDERMEIER A, ROMANEESSEN E, LEHNER S. Detection of coastlines in SAR images using wavelet methods[J]. IEEE Transactions on Geoscience and Remote Sensing, 2000, 38(5): 2270-2281. DOI:10.1109/36.868884.
[ 8 ] CASELLES V, KIMMEL R, SAPIRO G. Geodesic active contours[J]. International Conference of Computer Vision,1997,22(1):61-79.
[ 9 ] MALLADI R, SETHIAN J A, VEMURI B C. Shape modeling with front propagation: a level set approach[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1995, 17(2): 158-175. DOI:10.1109/34.368173.
[10] CHAN T F, VESE L A. Active contours without edges[J]. IEEE Transactions on Image Process, 2001, 10(2): 266-277. DOI:10.1109/83.902291.
[11] ZHANG K, ZHANG L, SONG H, et al. Active contours with selective local or global segmentation: a new formulation and level set method[J]. Image and Vision Computing, 2010, 28(4): 668-676. DOI:10.1016/j.imavis.2009.10.009.
[12] LI C, KAO C Y, GORE J C, et al. Implicit active contours driven by local binary fitting energy[C]∥Conference on Computer Vision and Pattern Recognition.[S.l.]:IEEE 2007:1-7.DOI:10.1109/cvpr.2007.383014.
[13] LI C, KAO C Y, GORE J C, et al. Minimization of region-scalable fitting energy for image segmentation[J].IEEE Transactions on Image Process,2008,17(10):1940-1949.DOI:10.1109/TIP.2008.2002304.
[14] ZHU G. Boundary-based image segmentation using binary level set method[J]. Optical Engineering, 2007, 46(5): 050501. DOI:10.1117/1.2740762.
[15] CHAN T F, SANDBERG B Y, VESE L A. Active contours without edges for vector-valued images[J]. Journal of Visual Communication and Image Representation, 2000, 11(2): 130-141. DOI:10.1006/jvci.1999.0442.
[16] HUO Y K, WEI G, ZHANG Y D, et al. An adaptive threshold for the Canny operator of edge detection[C]∥International Conference on Image Analysis and Signal Processing.[S.l]:IEEE, 2010:371-374.
[17] 沈琦, 汪承义, 赵斌. 几何活动轮廓模型用于高分辨率遥感影像海岸线自动提取[J]. 复旦学报(自然科学版), 2012, 51(1): 77-82.
SHEN Qi, WANG Chengyi, ZHAO Bin. Automatic waterline extraction in VHR imagery using geometric active contour model [J]. Journal of Fudan University(Natural Science), 2012, 51(1): 77-82. (in Chinese)
猜你喜欢
课堂内外·小学版(低年级)(2023年6期)2023-04-29 00:44:03
儿童时代·幸福宝宝(2021年11期)2021-12-21 06:18:46
制造技术与机床(2019年11期)2019-12-04 05:50:54
证券法律评论(2018年0期)2018-08-31 02:33:08
摄影之友(影像视觉)(2018年1期)2018-03-22 01:11:54
摄影之友(影像视觉)(2017年11期)2017-11-27 02:39:43
摄影之友(影像视觉)(2017年10期)2017-11-07 02:37:15
摄影之友(影像视觉)(2017年12期)2017-02-08 02:10:01
计算机工程(2015年4期)2015-07-05 08:27:39
外语学刊(2014年6期)2014-04-18 09:11:49