基于RBF与OS-ELM神经网络的AUV传感器在线故障诊断
2018-05-10 08:31陈自立龚时华赵朝闻
水下无人系统学报 2018年2期
段 杰, 李 辉, 陈自立, 龚时华, 赵朝闻
基于RBF与OS-ELM神经网络的AUV传感器在线故障诊断
段 杰, 李 辉, 陈自立, 龚时华, 赵朝闻
(中国船舶重工集团公司 第705研究所昆明分部, 云南 昆明, 650118)
传感器是自主式水下航行器(AUV)的重要组成部分, 实时准确地对AUV传感器进行在线故障诊断, 对提高AUV的安全性具有重要意义。文中通过对机器学习算法的分析, 建立了基于径向基函数(RBF)神经网络的AUV传感器预测器, 该预测器具有较高的实时性和准确性; 在此基础上, 首次将在线贯序学习机(OS-ELM)算法应用于传感器在线故障诊断, 进一步提高了预测器的实时性和准确性。文中还利用某AUV传感器实航数据, 分别对2种故障诊断模型进行了仿真和对比分析, 结果表明, 结合RBF神经网络算法的OS-ELM神经网络预测器, 其预测精度和实时性较RBF神经网络预测器更高, 而且性能更稳定, 可为AUV控制系统各传感器在线故障诊断方案设计提供参考。
自主式水下航行器(AUV); 径向基函数(RBF); 在线贯序学习机(OS-ELM); 神经网络; 在线故障诊断; 传感器
0 引言
传感器作为自主式水下航行器(autonomous undersea vehicle, AUV)控制系统的重要组成部分, 相当于人的感觉器官, 对AUV完成正常的水下作业任务起到非常关键的作用。但AUV的大部分传感器直接处于海水中, 相对较脆弱, 极易出现故障。因此, 保障AUV有效完成既定任务的前提是其传感器系统的可靠性与准确性, AUV传感器的故障诊断是其可靠性控制不可忽视的重要环节。
神经网络具有很强的非线性辨识能力, 被广泛地应用于智能控制、模式识别、信号处理、数据挖掘、卫生医疗和金融等领域, 同时也是故障诊断的方法之一。目前神经网络故障诊断方法应用最广泛的是误差反向传播(back propagation, BP)神经网络[1-2],而应用于AUV传感器的故障诊断方法主要有: 基于主元分析的故障诊断方法[3]、灰色预测动态预测故障诊断方法[4]、基于滑模观测器的故障诊断方法[5]、基于有限冲激响应(finite impulse response, FIR)滤波器的故障诊断方法[6]和基于BP神经网络的故障诊断方法[7]等, 这些方法的故障诊断准确性或依赖于训练样本的普遍性, 或依赖于精确的数学模型, 且都采用离线学习/在线工作的方式。由于实际中的故障情况瞬息万变, 如果训练样本不能覆盖所有的故障模式, 将会使泛化性变差, 预测不再准确。文中所采用改进的径向基函数(radial basis function, RBF)神经网络和在线贯序学习机(online sequential extreme lear- ning machine, OS-ELM)神经网络算法均为在线学习算法, 可将现场实测数据源源不断地输入神经网络模型作为训练样本, 解决了样本覆盖度不够广的问题, 也提高了故障诊断与预测的准确性。RBF神经网络具有逼近非线性函数的能力极佳, 收敛速度快且不易陷入局部极小点的优点。改进的RBF神经网络在线故障诊断模型区别于传统的RBF神经网络故障诊断方法[8-9], 其训练样本是动态可变的, 训练的同时也在进行传感器信号预测与诊断。
文中首次尝试将新兴的OS-ELM算法用于AUV传感器的故障诊断, OS-ELM方法准确地说是真正意义上的在线学习算法, 由于改进的RBF神经网络训练算法虽然在功能上实现了在线学习, 但只是让训练样本随着时间实现动态递推, 算法层面上还是属于离线范畴。因此, OS-ELM从算法原理上就实现了在线学习/在线工作, 其收敛性、泛化性都比改进的RBF神经网络算法更好。
1 径向基函数神经网络
1.1 概述
RBF神经网络具有类似生物神经元的局部响应机制, 是由3层构成的单隐层神经网络: 第1层是输入层, 节点数量和输入维数相等; 第2层是隐含层, 节点数量不确定; 第3层是输出层, 节点数量和输出数据维数相等[10]。RBF神经网络将RBF作为其隐含层的激励函数。



RBF神经网络采用差异性的学习策略, 隐含层基于特定的非线性准则调整, 输出层基于线性最优策略调整。文中采取自组织选取中心的方法对神经网络进行训练。自组织选取中心方法由Moody等[11]于1989年提出。
1.2 权值学习
文中的RBF神经网络权值的学习使用用最小均方(least mean square, LMS)误差算法。但LMS算法的输入为RBF神经网络隐含层的输出, 因为输入层与隐含层之间是没有权值连接的, 这里的权值学习针对的是隐含层与输出层之间的权值。RBF神经网络算法的流程如图2所示。
网络的代价函数


因此
进一步求得

可求出权值的更新迭代公式

1.3 RBF神经网络的改进
文中将RBF神经网络模型作了微小改进, 以实现样本数据的动态递推。如图3所示, 在RBF神经网络的输入层之前加入1个延时模块, 使神经网络的输入层能接收传感器的历史信号, 并将这些历史数据和当前传感器的输出值作为训练样本。
2 在线贯序学习机(OS-ELM)算法
OS-ELM是文献[12]基于极限学习机(extreme learning machine, ELM)[13]设计的在线增量式快速学习算法, 它适用于单隐层神经网络。OS-ELM把神经网络的训练问题转变成线性方程组问题, 这和以往的训练算法有着本质性的差异[14]。
OS-ELM算法的隐层节点不需要迭代式的调整。因此, 以ELM算法构建的神经网络的隐层神经单元个数和偏置可随机产生, 隐层与输入层之间的权值也是随机的。文中将隐层神经元的激励函数设置为RBF函数, 隐层节点个数随机产生。

2.1 初始学习阶段

文中选取RBF函数作为激励函数, 对于1组输入数据只有1个神经元被激活, 而其他神经元的激活程度可忽略, 故将RBF函数作为激励函数将以局部逼近的方式让算法收敛, 避免了全局逼近造成的收敛速度缓慢和落入局部极小点的问题。因此, 将RBF算法的局部响应原理与OS-ELM算法相结合, 满足了在线诊断实时性的需求。
此时, 根据广义逆的计算方法得
根据广义逆的计算方法
其中
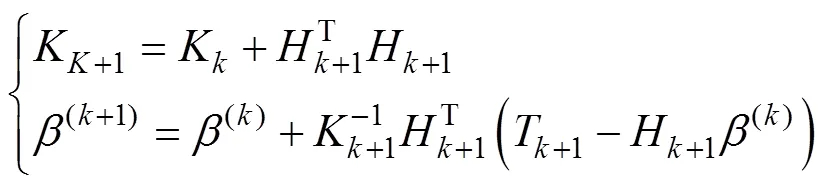
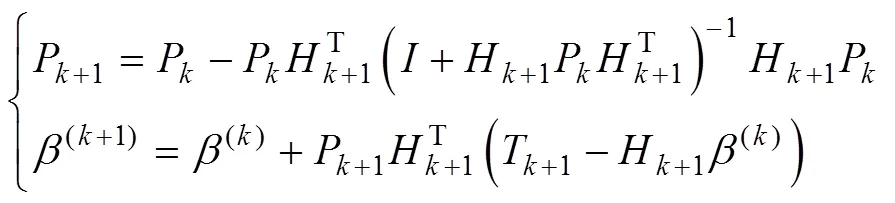
2.2 在线学习阶段

而
可知
由以上各式可得在线学习的递推公式

3 传感器故障在线诊断
3.1 RBF神经网络故障诊断模型




3.2 OS-ELM神经网络故障诊断模型
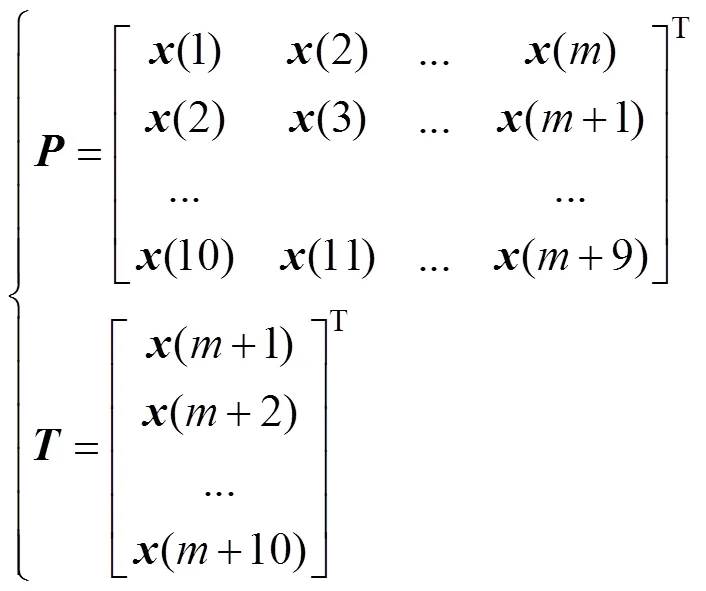
利用OS-ELM单隐层神经网络预测器对传感器在线故障诊断仍使用某AUV的深度传感器实航数据作为训练样本。与上述模型不同的是, OS-ELM单隐层神经网络预测器是多输入、单输出模型, 即每次训练时的样本输入是1组向量, 样本目标输出是1个单值。

若误差, 则将此时的采样数据 作为神经网络的输入, 作为神经网络的目标输出, 组成新的学习样本, 并根据OS-ELM的在线递推公式更新权值, 然后进行下一个时间点传感器输出的预测。否则, 如果在连续5个时间点内, 则断定传感器发生故障。利用OS-ELM神经网络预测器对传感器故障在线诊断的原理如图5所示。
由以上表述可以看出, 2个模型采用了不同的样本选取策略, 由于RBF本身并不是在线学习算法, 所以每次训练, 其训练样本都是1个包含了许多历史信息的矩阵, 以提高其预测的准确性, 但这也带来了更多的计算量。而OS-ELM算法是在线学习算法, 它每次训练的样本只需要1组向量即可, 其历史信息保存在每次更新的权值中, 这就减少了繁冗的计算, 提高了诊断模型的预测速度。
4 仿真分析
为验证RBF神经网络和OS-ELM算法的有效性, 采用某AUV的深度传感器实航数据进行仿真试验, 如表1所示。
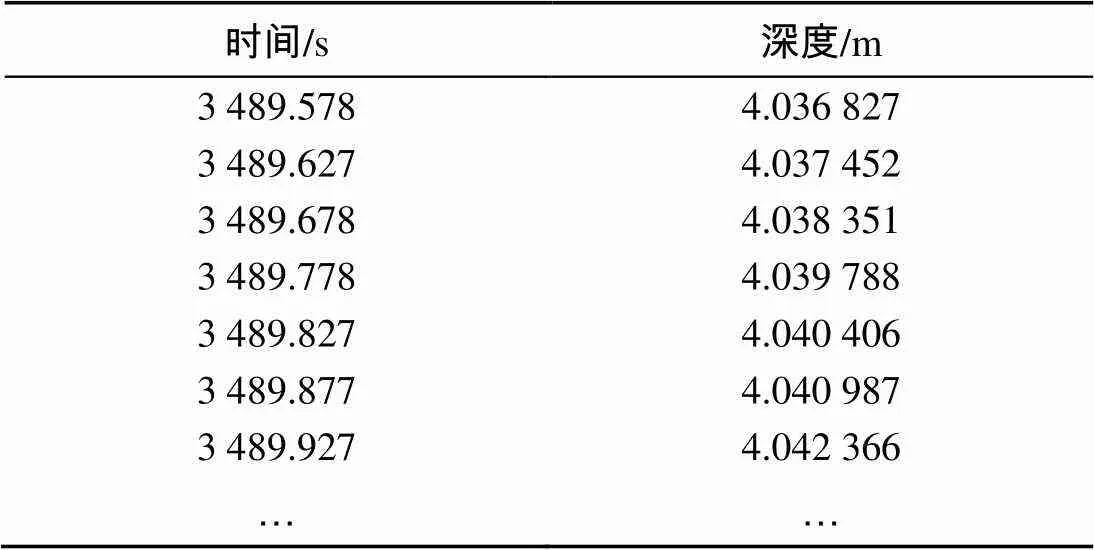
表1 深度传感器实航数据
如图6~图8所示, 选取深度传感器2 000个时刻的数据, 分别用RBF神经网络预测模型、OS-ELM单隐层神经网络预测模型和线性自适应预测算法模型对其进行实时跟踪预测。
由图可知, RBF神经网络在某些时刻有较大的波动, 但总体平稳, 对数据上升与下降趋势实现很好地跟踪, 可对传感器的数据进行有效地实时预测。OS-ELM单隐层神经网络模型没有出现较大波动, 总体上能跟踪数据升降趋势, 有较强的实时预测能力。经测试, OS-ELM的隐层为24层时, 预测能力最佳。线性自适应预测算法也可对数据进行实时有效地跟踪, 因为某AUV属于大型AUV, 其出现高速机动的情况较少, 所以传感器的观测数据趋近于线性, 因而线性自适应预测算法也可在AUV下潜、上浮和直航时实现深度传感器数据的实时追踪。

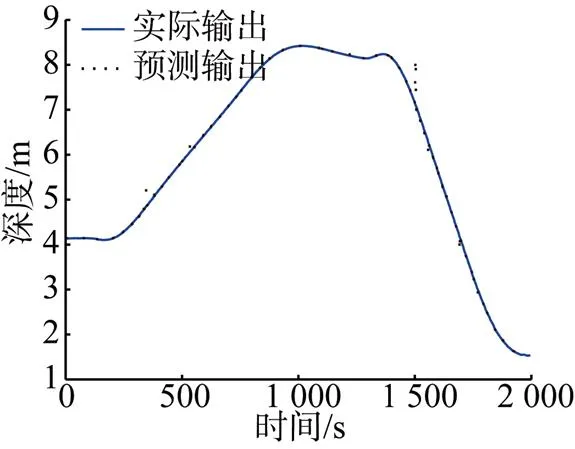
图6 传感器实际输出与RBF神经网络预测输出曲线
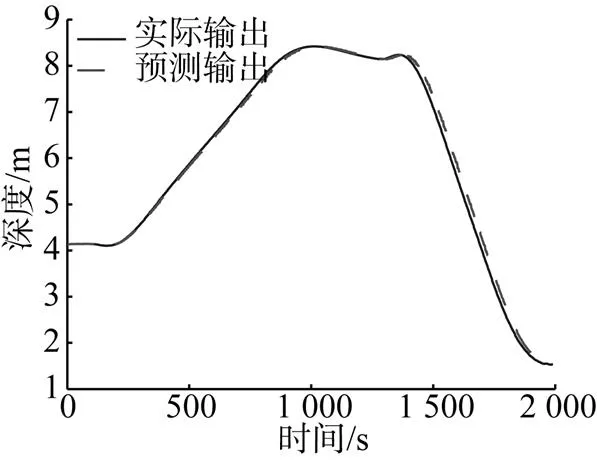
图8 传感器实际输出与线性自适应算法预测输出曲线
Fig. 9Predictive error curve of RBF neutral network
图10 OS-ELM 神经网络预测误差曲线
Fig. 10Predictive error curve of OS- ELM neutral network
Fig. 11Predictive error curve of li- near adaptive algorithm
AUV直航时选取500个时刻的数据, 在第210个时间点起的10个时间点内人为注入故障, 将这段时间传感器的值设置为4.15 m, 使速度传感器的输出值突变, 来模拟传感器漂移故障, 由图12、图13可知, RBF神经网络的预测输出曲线在第210个时间点附近出现较大波动, 均方误差曲线也出现较大波动, 且均方误差数值已连续5个时间点大于阈值, 故RBF神经网络预测模型判定传感器出现故障。
阈值的选取也是不可忽视的问题, 阈值选取得合理与否, 直接影响了故障判断的准确性, 若设置过小, 则轻微的扰动都会被错判为故障, 若设置过大, 则故障可能不会被检测出来。仿真过程中, 经多次试验, 最终将阈值选为0.02, 选为该值后2个神经网络故障诊断模型判定故障时都较为合理准确。
在第210个时间点起的10个时间点内人为注入故障, 将这段时间传感器的值设置为4.15 m, 使速度传感器的输出值突变, 来模拟传感器漂移故障, 由图14、图15可知, OS-ELM单隐层神经网络的预测输出曲线在第210个时间点附近出现较大波动, 且均方误差曲线也出现了较大波动, 均方误差数值已连续5个时间点大于阈值, 故OS-ELM单隐层神经网络预测模型均判定传感器出现故障。
从选取的第500个时间点起至最后一点人为注入故障, 将这段时间传感器的输出值设置为恒值, 模拟传感器的卡死故障, 如图16和图17所示, AUV此时处于下潜状态, RBF神经网络的预测输出曲线在第500点开始出现剧烈波动, 均方误差也出现了大幅波动, 且从第500个时间点开始数值均大于所设定的阈值, 故RBF神经网络预测模型判定传感器出现故障。
AUV下潜时将第500个时间点至最后1个时间点间的传感器输出设置为1个恒值, 模拟传感器的卡死故障, 由图18和图19可知, OS-ELM神经网络的预测输出曲线在第500点开始不断波动后与传感器输出一致, 均方误差也在该时刻出现了大幅波动, 且从第500个时间点起连续5个时间点均方误差都大于所设定的阈值, 故OS-ELM神经网络预测模型判定传感器出现故障。
如图20和图21所示, AUV上浮时在第150个时间点人为注入故障, 将其值改为4.2 m, 模拟传感器的扰动故障, RBF神经网络预测输出在150个时刻出现了波动, 均方误差曲线也从该时刻起连续5个时间点出现波动且大于阈值, 故RBF神经网络预测模型判定传感器出现故障。
如图22和图23所示, AUV上浮时, 设置故障情况如上所述, 由图可知, OS-ELM神经网络预测输出曲线在故障点开始出现上下波动, 均方误差曲线也从故障点开始出现波动, 且其数值已连续5个时间点大于阈值, 故OS-ELM神经网络判定传感器出现故障。
由以上仿真试验可知, RBF神经网络和OS-ELM神经网络在AUV水下直航、上浮和下潜的过程中均能较好地实时预测深度传感器的输出, 而OS-ELM神经网络具有更高的预测精度和更快的收敛速度。在AUV水下航行、上浮和下潜的过程中, 分别模拟了传感器的扰动故障、漂移故障和卡死故障, 仿真结果表明, RBF和OS-ELM神经网络对传感器数值的突变反应敏感, 可实时检测出传感器故障, 且OS-ELM较RBF具有更好的预测能力和实时性。
以上2种神经网络在线故障诊断模型可以应用于AUV控制系统的传感器, 如加速度计、多普勒、陀螺仪和深度传感器等, 从仿真结果可以看出, 2种诊断模型都可以检测传感器的扰动故障、漂移故障和卡死故障这类具有突变性的故障类型。
Fig.22Curves of actual output of sensor with disturbance fault and predi- ctive output of OS-ELM neural network
Fig.23Predictive output error of OS- ELM neural network when se- nsor disturbance fault occurs
5 结束语
文中建立了基于RBF神经网络的AUV传感器预测器, 并首次将OS-ELM算法应用于AUV传感器在线故障诊断。通过采用2种故障诊断模型对某AUV传感器实航数据进行仿真和对比分析, 可以看出: RBF神经网络和OS-ELM神经网络都能很好地预测出传感器下一时刻的输出值, 其中OS-ELM具有更好的预测能力和更快的预测速度; 当设定科学的阈值后, 对神经网络进行训练, 确保它能够预测AUV传感器的输出, 基于预测结果和真实输出之间的误差, 判断AUV传感器是否发生故障, 从而可以有效地实现AUV传感器的在线故障诊断。
综上所述, 基于OS-ELM算法的单隐层神经网络和RBF神经网络都可以较好地应用于AUV绝大多数传感器的在线预测与在线故障诊断, 从而提高AUV的安全性。文中的研究方法是基于数据驱动的, 并未融合其他故障诊断方法, 如基于主元分析方法、基于贝叶斯网络方法、基于小波分析方法等, 在以后的工作中, 可尝试将多种故障诊断方法相融合, 使故障诊断更准确。
[1] 陈艾琴, 刘乾, 朱大奇. 基于BP神经网络的水下机器人推进器故障辨识算法[J]. 电脑知识与技术, 2009, 5(19): 5214-5216.
Chen Ai-qin, Liu Qian, Zhu Da-qi. A Fault Identification Algorithm of Thrusters for Unmanned Underwater Vehi- cles Based on BP Neural Networks[J]. Computer Know- ledgeand Technology, 2009, 5(19): 5214-5216.
[2] 朱大奇, 陈楚瑶, 颜明重. 基于CA-CMAC的快速传感器故障诊断方法[J]. 电子学报, 2008, 36(8): 1646-1650.Zhu Da-qi, Chen Chu-yao, Yan Ming-zhong. Fast Sensor Fault Diagnosis Method Based on CA-CMAC[J]. Acta El- ectronica Sinica, 2008, 36(8): 1646-1650.
[3] 胡暾, 赵哲身, 郑毅. 基于主元分析的传感器故障检测与诊断[J]. 仪表技术, 2005(6): 30-32.
Hu Tun, Zhao Zhe-shen, Zheng Yi. Fault Detection and Diagnosis for Sensors Based On PAC[J]. Instrumentation Technology, 2005(6): 30-32.
[4] 严浙平, 陈涛, 秦政, 等. 灰色动态预测在AUV传感器故障诊断中的应用[J]. 传感技术学, 2008, 21(6): 1002- 1006.
Yan Zhe-ping, Chen Tao, Qin Zheng, et al. Application of Sensor Fault Diagnosis Based on Grey Dynamic Prediction for AUV[J]. Chinese Journal of Sensors and Actuators, 2008, 21(6): 1002-1006.
[5] 崔荣鑫, 徐德民, 潘瑛, 等. 基于滑模观测器的AUV传感器故障检测[J]. 弹箭与制导学报, 2004, 24(4): 233- 240.
Cui Rong-xin, Xu De-ming, Pan Ying, et al. AUV Sensor Fault Detection Based on Sliding Observer[J]. Journal of Pr- ojectiles, Rockets, Missiles and Guidance, 2004, 24(4): 233- 240.
[6] 朱大奇, 胡震. 水下机器人故障诊断与容错控制技术[M]. 北京: 国防工业出版社, 2012.
[7] 刘晓琴, 王大志, 杨青. 一种基于BP神经网络的传感器故障诊断方案[J]. 沈阳理工大学学报, 2006, 25(4): 16-19, 46.
Liu Xiao-qin, Wang Da-zhi, Yang Qing. A Fault Diagnosis Approach to Sensor Based on BP Neural Network[J]. Trans- actionsof Shenyang Ligong University, 2006, 25(4): 16-19, 46.
[8] 邵向潮, 何永强, 蔡鹃, 等. 基于RBF神经网络的温度传感器故障诊断[J]. 吉首大学学报(自然版), 2010, 31(2): 79-82.
Shao Xiang-chao, He Yong-qiang, Cai Juan, et al. Resea- rch on Fault Diagnosis of Temperature Sensor Based on RBF Neural Network[J]. Journal of Jishou University(N- atural Science Edition), 2010, 31(2): 79-82.
[9] 王玉甲, 张铭均, 金志贤. 水下机器人传感器及推进器状态监测系统[J]. 机械工程学报, 2006, 42(s1): 214-218.
Wang Yu-jia, Zhang Ming-jun, Jin Zhi-xian. Condition Monitorting System for Sensors and Thrusters of AUV[J]. Chinese Journal of Mechanical Engineering, 2006, 42(s1): 214-218.
[10] 陈明. Matlab神经网络原理与实例精解[M]. 北京: 清华大学出版社, 2015.
[11] Moody J, Darken C. Fast Learning in Networks of Locally-tuned Processing Units[J]. Neural Computation, 1989 (1): 281-294.
[12] Liang N Y, Huang G B, Saratchandran P, et al. A Fast and Accurate Online Sequential Learning Algorithm for Feed- forward Networks[J]. IEEE Transactions on Neural Netw- orks, 2006, 17(6): 1411-1423.
[13] Huang G B, Zhu Q Y, Siew C K. Extreme Learning Mach- ine: Theory and Application[J]. Neurocomputing, 2006, 70(1): 489-501.
[14] 尹刚, 张英堂, 李志宁, 等. 改进在线贯序极限学习机在模式识别中的应用[J]. 计算机工程, 2012, 38(8): 164- 166.Yin Gang, Zhang Ying-tang, Li Zhi-ning, et al. Applicati- on of Modified Online Sequential Extreme Learning Mac- hine in Pattern Recognition[J]. Computer Engineering, 2012, 38(8): 164-166.
(责任编辑: 杨力军)
Online Fault Diagnosis of AUV Sensor Based on RBF and OS-ELM Neural Networks
DUAN Jie, LI Hui, CHEN Zi-li, GONG Shi-hua, ZHAO Chao-wen
(Kunming Branch of the 705 Research Institute, China Shipbuilding Industry Corporation, Kunming 650106, China)
Sensor is an important component part of an autonomous undersea vehicle(AUV). Real-time and accurate online fault diagnosis of AUV sensors is of great significance to improve the safety of an AUV. This study analyzes the machine learning algorithms, and builds a radial basis function(RBF) neural network-based AUV sensor predictor with highaccuracy and real-time performance. Subsequently, the online sequential extreme learning machine(OS-ELM) algorithm is applied to the online sensor fault diagnosis to improve the real time performance and accuracy of the predictor. Two kinds of fault diagnosis models are simulated and compared by using the sea trial data of AUV sensor, and the results show that the prediction accuracy and real-time performance of the OS-ELM neural network predictor with RBF neural network algorithm are higher than that of RBF neural network predictor. This research may provide a reference for the design of on-line fault diagnosis scheme of AUV control system.
autonomous undersea vehicle(AUV); radial basis function(RBF); online sequential extreme learning machine(OS-ELM); neural network; online fault diagnosis; sensor
U674.941; TP183
A
2096-3920(2018)02-0157-09
10.11993/j.issn.2096-3920.2018.02.010
段杰, 李辉, 陈自立, 等. 基于RBF与OS-ELM神经网络的AUV传感器在线故障诊断[J]. 水下无人系统学报, 2018, 26(2): 157-165.
2017-06-26;
2017-10-01.
段 杰(1992-), 男, 在读硕士, 主要研究方向为武器系统与运用工程.
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
太原科技大学学报(2022年4期)2022-08-18
广西民族大学学报(自然科学版)(2022年1期)2022-05-18
一重技术(2021年5期)2022-01-18
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
科技风(2021年19期)2021-09-07
临床骨科杂志(2020年1期)2020-12-12
智能计算机与应用(2020年4期)2020-08-31
哈尔滨理工大学学报(2016年3期)2016-11-05