水下滑翔机技术发展现状与展望
2018-05-10 08:11沈新蕊王延辉杨绍琼李昊璋
水下无人系统学报 2018年2期
沈新蕊, 王延辉, 杨绍琼, 梁 岩,李昊璋
【编者按】水下滑翔机作为一种新型的无人水下航行器, 具有能耗小、续航力强、制造成本和维护费用低、可大量投放和重复使用等特点, 满足了长时续、大范围海洋探索的需要。2004年以来, 以混合推进技术为特征的新一代水下滑翔机成为国际研究新趋势, 较好地补充了传统水下滑翔机航速低和抗流能力较弱的问题, 具有良好的机动性、可靠性及隐身性。天津大学水下机器人团队作为国内率先参与设计研发混合推进水下滑翔机的机构之一, 其研制的“海燕-II”水下滑翔机采用最新混合推进技术, 设计最大工作深度1 500 m, 设计最大航程1 500 km, 可持续不间断工作30天以上, 具备独立在水下全天候工作的能力, 实现了水下滑翔机整体水动力优化设计、大深度滑翔、新型驱动融合设计和多任务观测模块集成研究等关键技术的自主创新, 有力推进了我国水下滑翔机的实用化进程。2018年4月, 青岛海洋科学与技术国家实验室海洋观测与探测联合实验室(天津大学部分)的“海燕-10000”深海滑翔机在马里亚纳海沟首次下潜至8 213 m, 刷新了深海滑翔机工作深度的世界纪录。我刊有幸邀请到该团队骨干成员精心撰文, 详细介绍了国内外水下滑翔机技术的发展现状, 并对该领域技术的发展趋势进行了展望, 希望此篇全景式的综述文章能为关注该领域的广大读者提供全面细致的信息解读, 旨在拓宽相关科研工作者的研究思路, 促进国内水下滑翔机技术的发展。
水下滑翔机技术发展现状与展望
沈新蕊1,2, 王延辉1,2, 杨绍琼1,2, 梁 岩1,2,李昊璋1,2
(1. 天津大学 机械工程学院, 天津, 300350; 2. 青岛海洋科学与技术国家实验室 海洋观测与探测联合实验室, 山东 青岛, 266237)
水下滑翔机依靠调节浮力实现升沉, 借助水动力实现水中滑翔, 是一种特殊的无人水下航行器, 可对复杂海洋环境进行长时续、大范围的观测与探测, 在全球海洋观测与探测系统中发挥着重要作用。文中综述了国内外水下滑翔机技术的发展现状, 重点介绍了水下滑翔机单机平台及其核心技术的研究进展, 并对支撑水下滑翔机动力学与控制领域的研究进行了归纳。此外, 依据国内外具有代表性的成果, 对水下滑翔机协作组网观测技术进行了概述, 并详细介绍了水下滑翔机小型低耗传感器设计与集成技术的发展应用, 阐述了水下滑翔机数据格式与协议领域的发展现状。最后, 从水下滑翔机功耗优化, 通信及智能化水平的提升等领域, 对水下滑翔机技术未来的发展趋势进行了展望。
水下滑翔机; 组网观测技术; 传感器设计; 数据格式与协议; 智能感知
0 引言
作为一种新型水下无人航行器, 水下滑翔机(underwater glider, UG)具有成本低、续航长及可重复利用等优点, 并兼具一定的航迹控制能力, 已成为海洋环境观测与探测平台的重要组成部分。此外, 它还具备短时延信息传输和大范围运行的能力, 是海洋四维空间强有力的观测和探索工具之一[1]。UG还可用于探测和追踪典型或突发海洋事件, 适用于“中尺度”和“亚中尺度”海洋动力过程的观测, 可为海洋学领域的研究提供高分辨率的空间和时间观测数据。
UG在新兴的全球海洋观测系统中发挥着重要作用。作为一种有效的新兴海洋探索平台, UG可在深远海和大陆架等独特海洋环境中进行重复调查, 其操作灵活, 具备多机协作观测等特性, 在这类精细化密集型海洋环境观测中具有广阔的应用前景。
当前, 国外UG技术的发展与应用主要集中于美国、法国、英国和澳大利亚等海洋强国, 其中美国一直是先驱者和领导者。自1989年美国海洋学家Stommel[2]提出UG的发展和应用规划后, UG技术进入高速发展期。20世纪90年代, 美国相继开发成功Slocum[3]、Seaglider[4]和Spray[5]3种典型UG, 并持续进行UG技术攻关和应用探索。除美国外, 欧洲和澳大利亚从21世纪开始专注于UG的应用和协作技术的研究, 并组建了各自的UG观测网络, 显示了其在UG应用方面的技术水平。
我国UG技术的研究始于本世纪初, 虽然起步较晚, 但在UG单机相关技术方面发展迅速。天津大学2002年开始第一代UG的研制, 于2005年研制完成温差能驱动UG原理样机, 并成功进行水域试验。同年, 中国科学院沈阳自动化研究所开发出了UG原理样机, 并完成湖上试验[6-7]。天津大学于2007年研制出“海燕”混合推进UG试验样机, 并在抚仙湖成功完成水域试验。此外, 国家海洋技术中心[8]、中国海洋大学[9]、中国船舶重工集团公司第710研究所[10]、第702研究所[11]、华中科技大学[12]、上海交通大学[13]、浙江大学[14]、西北工业大学[15]、大连海事大学[16]等也对UG技术进行了相关研究。2015年4~6月, 天津大学水下机器人团队投入多台“海燕”UG在多家UG性能综合测试中, 创造了我国UG当时的工作深度、连续航程、航时及剖面数等多项纪录。2017年3月, 中国科学院沈阳自动化研究所的“海翼-7000”深海滑翔机在马里亚纳海沟完成了6 329 m大深度下潜观测任务, 打破了当时UG工作深度的国际纪录。2018年4月, 青岛海洋科学与技术国家实验室海洋观测与探测联合实验室(天津大学部分)的“海燕-10000”深海UG在马里亚纳海沟首次下潜至8213 m, 刷新了深海UG工作深度的世界纪录。
1 UG本体平台
1.1 常规UG
最早的UG是由Teledyne Webb Research (TWR)公司于1991年研制成功的Slocum[17]。该UG经多年不断完善, 已成为当前应用最为广泛的UG产品之一。1999年美国Scripps和Woods Hole海洋研究所共同研制成功Spray, 其工作深度可达1500 m[18]。同年, 美国华盛顿大学研制成功Seaglider, 其采用新型技术的耐压壳体减小浮力改变量, 可有效节省能源[19]。目前, Slocum、Spray和Seaglider是国际上的主流UG产品[20]。近年来, 美国Exocetus公司还研发了用于浅海观测任务的ANT Littoral Glider和Exocetus Coastal Glider, 与其他UG相比, 其运行速度性能优势明显[21]。国际上, 当前典型常规UG如图1所示, 其相应主要技术指标见表1。

图1 常规水下滑翔机
1.2 多模式混合推进UG
针对UG运动速度慢、抗流能力相对较弱的问题, Bachmayer等[22]首次提出了“Hybrid Glider”的概念。经过近20年发展, 混合推进水下滑翔机(hybrid-driven underwater gliders, HUG)平台技术逐渐成熟。国外已达到实用水平和商品化的HUG, 包括法国研发的Sea Explorer[23]、Sterne[24]和北约研制的Folaga[25]。它们均在UG的尾部加装螺旋桨推进器, 实现多模式混合推进。
我国在HUG研发方面与国际基本同步, 也取得了关键性技术突破。天津大学经多年研发, 完成了HUG “海燕-II”(Petrel-II)的研制, 在工作深度、航行速度方面具有一定优势[26-27]。同时, 中国科学院沈阳自动化研究所也开展了HUG的单元技术攻关, 部分关键技术获得突破。当前国内外典型HUG如图2所示, 相应主要技术指标见表2。

表1 典型常规水下滑翔机主要技术指标

图2 典型的混合推进水下滑翔机

表2 HUG主要技术指标
1.3 深海UG
美国华盛顿大学为突破UG深度极限, 通过采用碳纤维复合材料耐压壳体, 研制出了用于监测深海环境的大深度UG——Deep Glider, 其设计工作深度6 000 m, 可搭载温度、盐度和溶解氧等多种任务传感器[28], 并实现了工作深度近6 000 m的实际应用。
国内, 中国科学院沈阳自动化研究所于2017年研制成功7 000 m级“海翼”深海UG, 并在马里亚纳海沟完成了6329 m大深度下潜试验[29]。青岛海洋科学与技术国家实验室自2016年实施“问海计划”项目, 支持天津大学和中国船舶重工集团公司第710研究所等多家单位进行4 000 m级深海UG关键技术攻关, 已研发完成的深海UG 4 000 m级样机于2018年4月成功开展系列化的海上试验验证。同期, 天津大学的“海燕-10000”首次下潜至8213m, 刷新了此前也是由我国深海UG保持的世界纪录。当前国内外部分深海UG如图3所示, 相应主要技术指标在表3中列出。
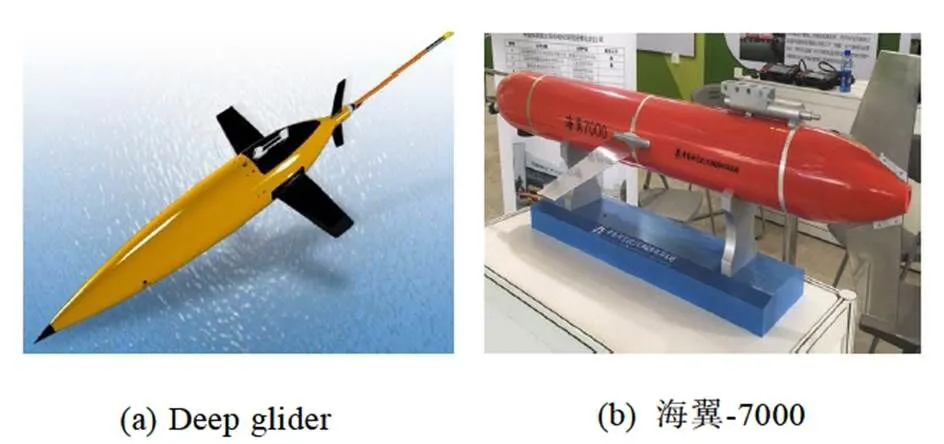
图3 深海UG

表3 深海UG主要技术指标
1.4 飞翼UG
美国Scripps海洋学研究所和华盛顿大学联合在2003年开发了Liberdade级翼身融合大型UG[30]。该类UG分为声学滑翔机X-Ray和Z-Ray, 是世界上已知体积和质量最大的UG[31]。
1) X-Ray
X-Ray是一种基于“飞翼”设计的UG, 其整体结构如图4所示。X-Ray翼身融合, 设计独特, 可实现翼展水平距离最大化和功率消耗最小化, 最大限度地提高其探测和定位能力, 并在蒙特利湾开展了相关的海试应用[32]。
2) Z-Ray
Z-Ray是X-Ray的改进型, 搭载有声学传感器, 其主要功能是跟踪和自动识别海洋哺乳动物[33]。Z-Ray升阻比为35: 1, 具有良好的姿态控制和航行能力, 目前已应用于圣地亚哥海底被动声学自主监测海洋哺乳动物计划(passive acoustic autonomous monitoring of marine mammals program), 如图5所示。
美国X-Ray和Z-Ray两型号翼身融合设计的UG, 与传统UG相比融合了展弦比大的机翼, 可提供更高的升阻比, 并提升能源利用效率, 但降低了内部空间利用率。因此, 在提高UG水动力性能的基础上, 尽可能地增加内部空间, 是翼身融合UG的设计难点和需要突破的技术方向。
在国内, 孙春亚等[34]针对翼身融合UG的设计难点, 以最大航程为目标对UG外形设计进行优化, 提高了UG的升阻比并增大了机体体积, 兼顾了高水动力性能和大能源携带量两方面的需求; 何衍儒等[35]使用非支配排序多目标遗传算法对翼身融合UG机身结构进行了质量和外形的多目标设计优化, 其结果对翼身融合UG机身结构优化设计具有一定工程参考价值。
1.5 温差能UG
温差能驱动UG是指利用水域表层与深层的温度差实现动力驱动功能。美国TWR公司是国外唯一开展温差能UG的研究机构, 已完成了4代样机的研制[36]。其于1988年研制出世界首台温差能驱动UG原理样机, 通过水域试验验证了温差能UG方案的可行性[3]; 于2005年研制成功了具备连续俘获海洋温差能, 执行远航任务能力的第2代Slocum Thermal WT01[37]; 2008年, 第3代Slocum Thermal研制成功, 其温差能换热器性能有了较大提升, 换热器基本定型[38]; 并于2013年研制成功了第4代Slocum Thermal E-Twin温差能驱动UG, 其具有将温差能转化为电能的功能, 可为主控等耗电系统供电, 且不受自身携带电池能量的限制[39](见图6)。

图6 4代Slocum温差能水下滑翔机
国内, 天津大学自2002年开始进行温差能驱动UG的关键技术攻关。2005年7月, 其温差能UG在千岛湖进行水域试验, 完成了25个剖面运动后回收[40-41]。2006年, 王树新等[6]对此温差能UG进行了动力学分析, 为温差能UG技术的进一步发展提供了理论支撑。目前, 天津大学已开发出温差能UG的工程样机, 并在2015年实现了连续700余公里, 200余剖面的海上应用。
温差能UG利用相变材料(phase change material, PCM)的热胀冷缩获取海洋热能, 并将其转化为机械能或电能, 以实现浮力驱动。其中相变材料对周围海水温度变化敏感, 可通过增加位移和降低UG滑翔角的绝对值来消除主温跃层对热机性能的负面影响并提高UG的相关性能[42-44]。Xia等[45]分析了PCM熔化凝固的新型数学模型, 验证了熔融率与胶囊过冷度的影响因素, 其研究结果为温差能UG的设计提供了有用信息。在热机的基本原理上, Ma等[46]建立了系统压力与相变率之间关系的非线性模型, 综合分析了影响系统压力和储能的因素。此外, Zhang等[47]还介绍了一种独特的层间热机, 其可有效提高温差能UG的换热效率。
1.6 波浪滑翔机
严格来说, 波浪滑翔机(wave glider)利用波浪能实现驱动, 只能完成水面表层观测, 但其弥补了传统UG信息采集的盲区, 是对采用传统运动原理UG作业区域的补充, 是一种特殊的UG。波浪滑翔机最早由美国Liquid Robotics公司于2009年成功研发, 命名为Red Flash, 并完成了一系列海上试验[48]。2011~2013年, 该型波浪滑翔机穿越太平洋, 打破了“无人船”最远航程的世界纪录。Red Flash波浪滑翔机由水面船和水下滑翔动力机构两部分组成, 其整体结构如图7所示。
我国对于波浪滑翔机的研究起步较晚。为增强我国海洋探索能力, 中国船舶重工集团公司第710研究所于2017年成功研制出了具有国际技术水平的波浪滑翔机“海鳐”, 并于同年6月成功海试, 见图8。同期, 桑宏强等[49]共同参与的大型“黑珍珠”和小型“海哨兵”波浪滑翔机也研制成功并通过海试, 目前可小批量生产。
2 UG关键技术
2.1 浮力驱动技术
浮力驱动系统作为UG的关键部件, 是一套机、电、液耦合的液压驱动和体积调整系统, 直接决定了整机的性能与可靠性, 并影响UG的航速、航程和可控性。浮力驱动系统通过改变外部油囊的体积来改变UG的净浮力, 根据外部油囊体积的改变方式分为2类: 一类是利用液压泵改变外部油囊体积或移动活塞来改变总排水体积的液压方法[4-5], 如Slocum 电动滑翔机采用的单冲程柱塞泵方式和Seaglider、Spray滑翔机采用的往复式活塞泵方式; 另一类是通过PCM的热胀冷缩改变外部油囊体积的热机方法[6,17]。热机方法可直接从环境中获取实现自身沉浮所需要的能量, 极大减少了能量消耗, 但受到不同海域温跃层深度的限制。而利用液压泵改变外部油囊体积的液压技术相对较成熟, 目前美国Slocum、Seaglider、Spray、ANT水下滑翔机以及法国Sea- Explorer, 其浮力驱动系统主要技术指标与天津大学开发的“海燕”UG对比情况[19, 25, 50-51]见表4。
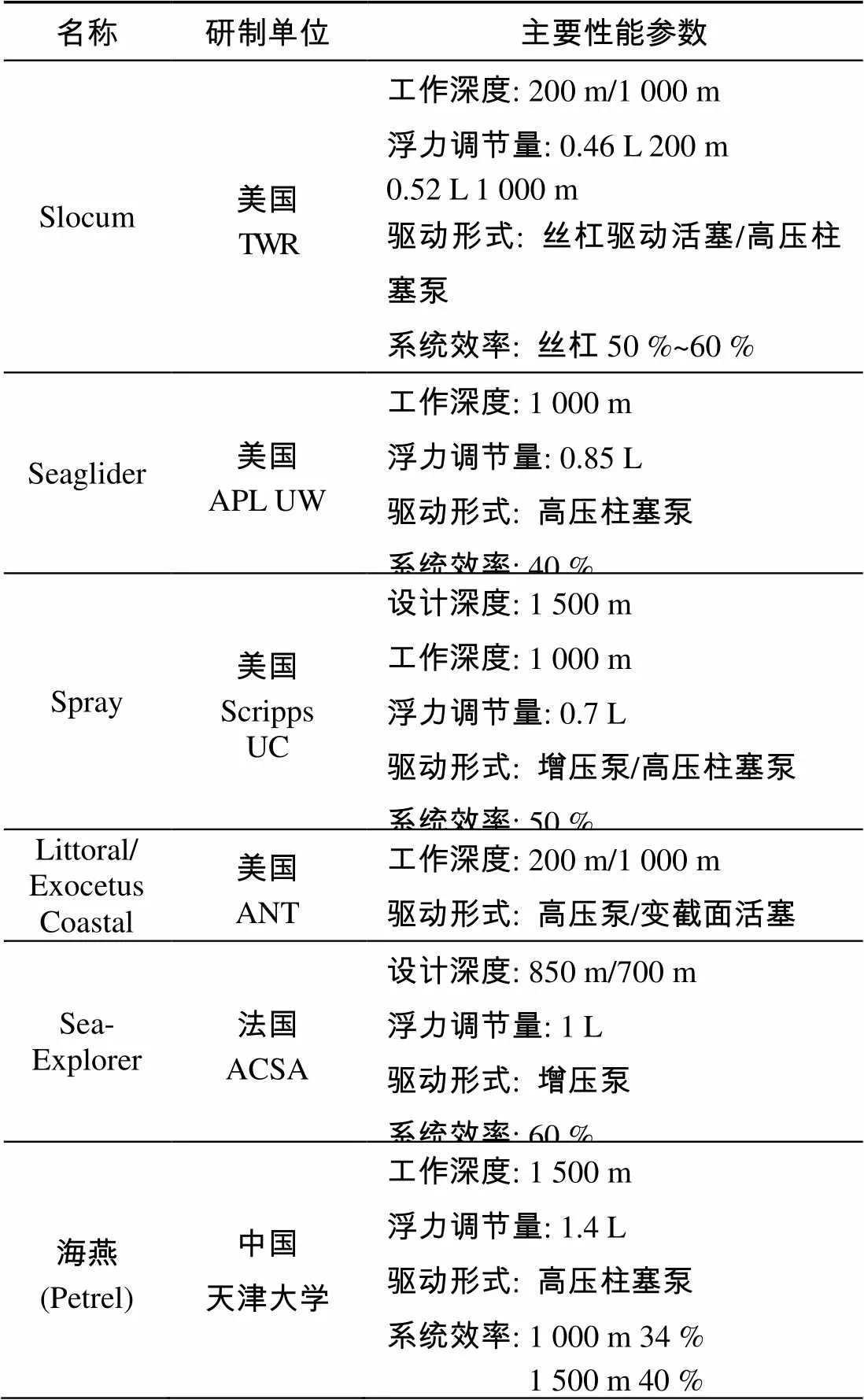
表4 典型水下滑翔机浮力驱动系统技术指标
同时, 为了满足深海探测技术的需求, 美国的Deepglider滑翔机[52]、新西兰Otago大学研制的UnderDOG UG, 以及日本海洋工程技术中心研制的大潜深2 100 m的高压浮力驱动系统均采用以微型轴向柱塞泵为核心的高压浮力驱动系统[53-55], 可见深海UG浮力驱动技术在大深度UG研发中的重要地位。
2.2 姿态控制技术
UG是一个由壳体、姿态调节及浮力调节等系统组成的多体系统。其中姿态调节系统是UG的重要组成部分, 一般分为“仅内部姿态调节技术”和“尾舵结合内部姿态调节技术”两类。内部姿态调节系统通过控制舱内质量块的移动实现对整机重心位置的调节, 从而达到有效的姿态控制, 其设计的优劣直接影响UG的性能。
1) 仅内部姿态调节
仅内部姿态调节系统由俯仰调节机构和横滚调节机构构成。其中, 俯仰调节机构通过控制质量块在UG轴线方向上的移动, 实现UG按照设定的滑翔角度沉浮; 横滚调节机构则通过控制偏心质量块的周向转动调节UG的转向。通过控制舱内质量块轴向平移和周向转动的内部姿态控制方法, 适用于深海UG, 如Spray[5], Slocum thermal[56], Seaglider[4]和Deepglider[28]滑翔机等均采用直流电机驱动偏心质量块的方式进行姿态调节, 且质量块通常为UG机舱内的电池包。国内天津大学研制的Petrel-II UG的姿态控制亦采用了这种方式, 将姿态控制系统置于UG壳体之内, 因此不必考虑姿态调节系统的高压密封问题。
2) 尾舵结合内部姿态调节
通过采用舱内质量块轴向平移和附连到UG尾部的方向舵尾舵调节姿态的UG结构相对简单, 适用于执行地形地貌相对复杂的浅海水域任务。例如电能驱动Slocum UG采用步进电机调节尾舵转向, 进而控制UG的转向[3]。中国科学院沈阳自动化研究所研制的“海翼”号UG的姿态控制方式与电能驱动Slocum UG相似, 也是通过步进电机调节尾舵实现转向, 从而调节UG的航向[57]。
2.3 多模混合推进技术
目前, 多模HUG的研究已经成为国际性研究热点之一。由于其较好地补充了传统UG航速低的问题, 在航速、功耗、航程、寿命及机动性和隐身性等方面综合性能优良, 可以满足更为广阔的应用需求。目前, 多模HUG均采用浮力驱动为主, 辅以螺旋桨推进或喷水推进等, 在传统水下滑翔运动之外, 实现动力滑翔、水平推进等功能, 一定程度上提高了UG的运动速度和机动性, 丰富了UG的运动模式。但上述功能的实现也不可避免地增加了UG的能耗, 减少了其续航能力。为此, UG的混合推进功能更多是针对具体的任务需求, 在平衡机动性和续航能力的基础上进行总体优化设计。多模混合推进的设计方案, 一定程度上会造成UG运动失稳, 为此对UG运动稳定性和操控性均提出较高要求, 是需要解决的关键技术。针对此类难点, 天津大学对HUG的运动模式和稳定性进行系统分析[58-60], 设计开发了有翼HUG“海燕”[61-63]; 哈尔滨工程大学则设计了具有塑料外壳和水射流推进器的水下航行器[64-66]; Yue等[67-71]也设计开发了类似的水下航行器。
2.4 轻量化耐压壳体技术
UG在水中运行时, 其所承受的海水压力与下潜深度成正比。在承受外压情况下, UG壳体发生变形, 会引起所受浮力的变化和耐压壳体的失效。在确保壳体强度和稳定性的同时, 尽量减轻壳体质量并扩大内部空间和负载能力, 是最为理想的UG壳体优化技术。因此, 对UG耐压壳体的结构进行优化设计也尤为重要[72]。为了使耐压壳体既满足工作需要, 又具有相对较轻的质量, 王兵振等[73]对UG耐压壳体进行了结构参数分析, 扩大了UG中段的舱内空间, 减轻了壳体质量。田文龙等[15]通过对UG壳体和机翼的设计优化, 提出了一种新型高速UG, 并通过仿真分析验证了其设计方法的优越性。而Song等[74]在优化UG主体外形和改进壳体材料的基础上, 使用有限元分析对UG耐压壳体进行了结构分析和尺寸优化。通过对UG二次开发, 自动生成了多气泡压力舱结构的参数化模型, He等[75]则利用克里金插值法和非支配排序遗传算法对UG多气泡压力舱进行了多目标优化。
3 UG动力学与控制
3.1 动力学建模
动力学模型是UG运动性能分析和控制策略设计的理论基础, 是开展UG研究的重要内容之一。UG通过液压系统改变浮力, 在垂直平面中遵循锯齿运动模式, 混合推进UG还具备在水平面上直线航行能力。其固定翼的水动力升力提供了UG的动能, 因此除了调整浮力之外, UG水平移动不需要额外的能量消耗。Graver与Bhatta等[76-77]最早建立了UG的动力学模型, 并开展了仿真分析, 此后许多学者均以此为基础, 对各自研发的UG发展了适用的动力学模型。例如, Graver[78],Bhatta和Leonard[79]建立了描述Slocum UG行为的动力学模型和非线性动力学方程。基于细长体理论, Isa和Arshad[80-81], Noh和Arshad[82]为马来西亚理科大学UG推导了动力学模型并进行了优化。Tian等[83]则根据波浪滑翔机的驱动原理, 建立了2D非线性动力学模型。针对浮力驱动UG运动时的能量变化, Ma等[84]建立了运动方程, 该结果有助于UG的设计和控制。此外, 上海交通大学胡仞与[85]则利用UG模型推导动力学方程, 对UG在垂直面内的运动进行了深入研究。为分析UG纵平面运动特性, 西北工业大学陈宇航等[86-87]通过运动学和动力学分析, 建立了较为完善的UG 3D空间数学模型。
UG通过旋转的内部质量(如电池组)或结合尾舵来调节方向。尽管大多数UG系统中都观察到了螺旋运行状态, 但与垂直面中锯齿形运动机制的研究相比, 其产生的基本机制仍然有待深入研究。针对这一难点, Kan等[88]给出了关于UG螺旋运动的一些模拟结果。应用微扰理论, Mahmoudian等[89-90]推导出了稳定螺旋运动的近似解析解。Zhang等[91]则简化了水下滑翔动力学的方程, 使用一种递推算法, 为其螺旋运动提供了快速解决方案。与常规UG相比, 混合驱动UG动力学模型的研究仍未完全成熟[92-93]。基于传统UG动力学建模、常规水动力学和潜艇水动力学建模方法, Wang等[94]对混合动力UG的动力学模型进行了相应优化。而Isa[95]对UG的数学模型及其运动控制进行了分析。针对最小化倾斜角变化值的问题, Gao等[96]根据海上试验观测数据, 优化了UG非线性动力学模型。
3.2 控制方法

针对在非稳定、非均匀流中的UG操作控制问题, Fan等[102]提出了一种非线性多体动力学模型。从做功的角度, 马冬梅等[103]提出了UG滑翔姿态的优化目标函数, 得出了基于其滑翔角的UG模型控制规律。针对混合推进UG的运动控制问题, Claus等[104]探讨了基于镇流器的深度控制器及其应用。杨海等[105]构造了新型前馈控制算法。Niu等[58]进行了混合推进UG的控制稳定域的分析, 对混合推进UG控制系统设计起到一定指导意义。而白乐强等[106]对混合驱动UG垂直面上的运动提出了一种基于逆模型和滑模控制的非线性控制方法, 该方法将原始系统解耦为2个单入单出的线性系统, 具有良好的控制性能, 而且对外界扰动具有一定的鲁棒性。
4 UG编队与协作观测技术
UG载荷能力有限, 一般小于5 kg, 因此单台UG的观测或探测功能相对单一。为拓展UG的单机功能, 多机编队与协作是其重要的发展和应用方向之一。UG的编队与协作观测技术以UG为核心装备, 可涵盖潜标系统、浮标系统、UUV等多种观测系统平台, 具有较好的拓展性, 可以大大提高移动观测平台执行复杂任务的综合能力, 可满足海洋观测与探测复杂的任务需求, 将成为未来深、远海移动观测的重要技术手段之一。UG暂时还不具备水下通信能力, 无法实现多机水下通信, 为此每次UG浮出水面, 接受控制中心的指令并发送观测数据, 辅助其编队与协作观测。多台UG可以分别通过控制分段线性路径, 实现对其管控, 达到UG的编队与协作能力。
4.1 UG多机协作/协调技术
在一个典型的UG集群部署中, 多个UG可在相同的空间和时间上以适当的频率对一个多变的海洋区域进行观测与探测。因此, 多机协作/协调技术可提升UG等无人航行器海洋采样、测绘、监视和通信等的作业效率和应用效果[107]。为此, Leonard等[108]提出了一个多UG的协调和分布式控制框架。Fiorelli等[109]则描述了一种多机协作控制方法, 并在蒙特利海湾进行了海上试验。由于分布测量可提高UG集群组网测量性能, Paley等[110]在反馈控制协调UG轨迹采样经验的基础上, 设计出了一套UG协调控制系统(glider coordinated control system, GCCS)。随着对UG自主协作/协调技术的深入研究, 针对具有时变参考轨迹的多个UG的分布式协调跟踪问题, Peng等[111]提出了一种神经动态控制设计方法, 可用之开发节点控制器, 以达到多机协调同步, 为UG多机编队控制的研究提供参考。
为了更好地利用资源和分配任务, UG协作/协调系统在大规模海洋调查方面具有很大的应用前景[112]。同时使用集成有不同类型传感器的UG, 可提高组网整体的观测与探测性能, 减少任务执行时间, 提供更有效的观测与探测数据, 近而提高执行任务的成功率。因此, 突破UG的编队与协作观测技术的难点, 可使得单机或者多机协作/协调的UG集群组网得到广泛的应用。
4.2 国外发展现状
1) 自主海洋采样观测网
上世纪90年代开始, 美国海军研究院自主海洋采样网(autonomous ocean sampling network, AOSN)项目研究启动, 其可用于观测大范围近海及沿海区域内各种重要海洋现象[113]。在美海军研究院支持下, AOSN分别于2000年、2003年和2006年在蒙特利海湾进行了一系列海洋观测试验。在试验中, 多台UG作为移动分布式的海洋参数自主采样网络节点, 在海洋环境参数采样应用中显示出卓越的优势和广阔的应用前景。
2) 近海水下持续监视网络
美国近海水下持续监视网络(persistent littoral undersea surveillance network, PLUSNet)是一种半自主控制的海底固定节点加水中机动节点的网络化设施(见图9)。该网络由携带半自主任务传感器的多个无人水下航行器(移动式通信节点)组成[114]。航行器间可以互相通信、自主决策, 实现多种任务执行功能, 可密切监视并预测海洋环境参数变化。其中UG等的主要任务为水文测量、海洋噪声和水下目标噪声侦测, 并快速生成濒海环境态势变化图。
3) 综合海洋观测系统
美国海洋大气署于2002年提出组建全国性的综合海洋观测系统(integrated ocean observing system, IOOS)网络计划[115]。由于UG在海洋观测网中的重要作用, 海洋大气署又于2012年8月初步提出国家水下滑翔机组网计划(national glider network plan), 并成立数据中心, 采用统一的UG数据格式, 共享其观测数据。IOOS是美国海洋现象观测的有力工具, 具有良好应对海洋突发状况的能力(见图10)。
4) 欧洲水下滑翔机观测网
为实现全球性、区域性及近海岸等不同范围内的长期海洋观测任务, 英国、法国、德国、意大利、西班牙和挪威等国家组成了欧洲水下滑翔机观测网(European gliding observatories network, EGO)。2005~2014年4月底, EGO陆续布放了大约300台次UG执行各种海洋观测任务, 用于实时采集大西洋海域内的海洋剖面数据信息。
5) 澳大利亚综合海洋观测系统
基于美国和欧洲商品化的UG产品, 澳大利亚也进行了UG网络构建技术的研究, 成立了澳大利亚综合海洋观测系统(Australian integrated marine observing system, IMOS)。该项目于2012~ 2013年共布放了包括Seaglider和Slocum在内的数十台UG, 共计执行调查任务超过150个, 主要集中用于观测澳洲东部、南部和西部边界流, 促进了澳大利亚在UG协作组网应用技术方面的迅速发展。
4.3 国内发展现状
2014年9月, 天津大学在我国西沙附近海域最早实现了3台UG的编队与协作观测作业, 开展了初步尝试。2017年7月, 中国科学院沈阳自动化研究所在南海海域布放了共计12台“海翼”系列UG, 开始进行多机的协作观测测试。同期, 天津大学依托青岛海洋科学与技术国家实验室, 联合中国海洋大学、中船重工第710研究所、中山大学、复旦大学等高校和研究机构, 完成了最大规模的一次面向海洋“中尺度涡”现象的立体综合观测网的构建任务(见图11)。其中, 移动观测平台包括“海燕”UG、各型波浪滑翔机等共计30余台套国产海洋先进观测装备。与以往单机、单种平台的观测不同, 这次任务是综合采用多种设备, 进行多参数、综合、立体、协作、异构组网同步观测, 是我国首次实现多种类水面和水下移动平台、定点与固定平台相结合的协作观测, 有效提高了我国海洋观测与探测及相关数据获取的能力和水平。这次综合调查所构建的立体观测系统, 是我国区域海洋观测的一个重要里程碑。但目前, 我国尚未在国家层面上开展基于UG的观测网络构建和长时续的业务化运行。
5 UG专用传感器集成技术
UG载荷小、功耗低, 为此其应用的传感器多在体积、质量和能耗方面进行了适应性改进, 以满足UG的搭载要求。目前, 国内外UG已成功实现多种任务传感器的集成与应用, 包括温盐深传感器(conductivity temperature depth, CTD)、溶解氧传感器/光学氧传感器、海流计、水质传感器、叶绿素荧光计、有色可溶性有机物传感器、光学反向散射计、水听器、高度计、声学多普勒湍流剖面仪(acoustic doppler current profilers, ADCP)和剪切流传感器等, 可为海洋物理、海洋生物化学和海洋声学等现象的分析研究提供支撑。
随着小型低能耗传感器及其集成技术的发展成熟, 国内外集成有不同类型传感器的UG逐年递增, 不同UG可携带多种不同功能的传感器负载, 完成不同的观测与探测任务。UG任务传感器搭载情况如图12所示。

图12 水下滑翔机搭载的各类传感器
UG运动速度慢、稳定性好、噪音低, 无论在海洋微结构湍流观测, 还是在声学探测方面, 均为理想的传感器搭载平台。文中针对UG在声学探测和湍流观测两方面的特殊应用做重点阐述。
5.1 声学传感器集成与应用
UG平台可采集海洋空间尺度上的声学和环境数据, 是开展海洋声学研究的重要工具之一。2012年, Wall等[116]将水听器集成于UG的后罩中, 成功地在大空间范围内检测到鱼发出的声音。2012年11~12月, 在缅因州中部海湾, 2台UG采集了超过25000种由鲸鱼等造成的声学信号[117]。Guerra等[118]使用波浪滑翔机搭载的被动声学监测设备记录人类活动在海上产生的自然噪声水平和声学污染, 包括船舶交通等。应用Seaglider UG, Uffelen等[119]通过搭载声学数字监视器记录夏威夷群岛鲸类声音活动。Wall等[120]使用被动声学UG技术, 探索美国东南部陆架大西洋水域的声音信号。而Liu等[121]使用Petrel-II UG测量南海的水下噪声, 得到并分析了UG轨迹上的水下噪声谱图。以上研究充分显示了UG作为海洋声学探测平台的重要应用前景。
5.2 湍流传感器集成与应用
使用UG开展海洋微结构湍流观测, 也是其重要应用方面之一。为了验证UG测量微结构湍流的可行性, Wolk等[122]将湍流传感器安装在Slocum UG中, 尝试观测海洋内波与混合等现象。Rudnick等[123]使用Spray UG, 在其头部集成专用海洋微结构湍流传感器, 于2007年4月~ 2008年7月进行了7次测量任务, 取得了较好的海洋剪切流数据, 并获得微结构湍流分布特征(见图13)。
为了更好地了解海洋温跃层内的湍流特性, Schultze等[124]使用UG采集获得连续7天和12天2组海洋微结构湍流数据集, 用于分析海洋湍流动能的耗散率, 发现了海洋温跃层内湍流的部分规律。
综上所述, 当前国外适用于UG搭载的小型、低耗传感器设计与集成技术发展迅速, 已成功研发并实现UG与多种任务传感器的集成, 应用于海洋环境参数观测, 如压力、电导率、温度、湍流、海流、硝酸盐以及溶解氧等, 且应用效果显著[125]。我国虽然在海洋测量传感器设计方面具有较好的基础, 但目前除部分声学传感器外, UG平台上所用传感器大部分为进口设备, 仍缺少一定的技术积累。
6 数据格式与协议
UG已广泛应用于海洋科学和地球科学领域, 改变了人类对于海洋信息的采集方式, 极大地拓展了人类对海洋认知的能力与范围, 这些进展得益于UG日益获取的大量数据。随着国内外多型UG的广泛应用, 其数据格式与协议的规范性也是推进其更大范围应用的重要内容。UG作为一种测量海洋环境参数的新型工具, 已有的海洋信息数据的格式转化对其具有很大的借鉴作用。
1999年, 实时地理海洋阵列观测系统(array for real-time geostrophic oceanography system, ARGOS, 全球海洋观测网的代称)开始着手改变平台ID等数据格式, 进行规范化和标准化管理。国外研究机构对UG观测数据进行标准化时, 多采用与ARGOS数据基本相同的流程。2010年, 世界气象组织提出了使用通用二进制表示气象数据格式, 用以解码NetCDF文件的编码, 进行UG测量得到的物理和光学等参数数据的标准化。CF作为另一个主要的标准格式, 可提高由NetCDF API创建文件的处理和共享性能, 正逐渐被欧洲相关组织引用。使用这些规范的数据, 可对UG路径实现更好的规划。2011年, Smith等[126]指出对UG的观测数据进行类似于ARGOS剖面的标准化处理办法, 推进Slocum UG应用ARGOS数据格式与协议。
2007年, 美国SlocumUG采用数据可视化的文件传输协议, 在海面时发送UG平台监控数据, 首次完成了海洋环境和工程数据的可视化[17]。2011年, 欧盟开启滑翔机海洋观测与管理研究(gliders for research, ocean observation and management, GROOM)项目, 开发完成了UG数据处理方法, 并允许GROOM项目参与者统一UG的数据格式, 以界面形式清晰、实时地展示UG的航行情况[127]。
7 UG发展趋势
更长的续航能力、更大的载荷能力、更深的工作能力、更灵活多变的运行模式、更广泛的工程应用是未来UG持续发展的目标。在UG混合推进和自主机动的背景下, 人工智能、深度学习、先进仿生等科技将打破UG的传统模式, 赋予其更多的应用功能和广阔前景, 因此这些新兴技术将成为未来UG研究的前沿。该节将讨论“可变翼UG技术”、“仿生UG技术”和“智能化UG” 3个新兴研究方向的进展及其展望。
7.1 可变翼UG技术
传统UG的机翼固定在机身上, 机翼不能随着海洋环境和任务的变化做出适应性的调整, 其流体动力学参数也是固定的[3]。而具有可控机翼的UG具有可变的流体动力学参数, 能更好地实现其观测任务。为了使UG能自适应复杂多变的海洋环境, Arima等[128]成功研发ALEX可变翼UG, 设想使用大量这种智能UG对海洋环境进行自适应观测[129]。随着新型材料科技的发展, Angilella等[130]提出的可变弧面翼, 利用海洋温跃层中的温度变化触发植入的形状记忆合金以改变机翼形状(见图14)[131]。而国内学者Yang等[132]设计的可变翼UG机翼可以实现3种形状的变化运动, 包括沿2个轴的延伸及其机翼的旋转, 该设计具有较大的工程实践价值。
可变翼UG具有较高的环境自适应性和运动性能, 但因受限于现阶段的基础工艺水平, 一直发展的较为缓慢。而随着生物科学、仿生技术的发展, 通过融合多种UG新兴科技, 可变翼UG技术将成为未来UG智能化的基础技术之一。
7.2 仿生UG技术
基于仿生学与多学科融合, 仿生UG将成为传统UG逐步智能化的“中间环节”。经多年发展, 国内外仿生UG得到了一定的发展。德国Evo- Logics公司采用智能设计, 按照鳐鱼进行仿生设计, 研制出一款仿生UG SubSeaglider。国内北京航空航天大学等多家科研单位根据鱼类运动肌群和流体外形的运动原理, 进行了大量的UG仿生研究, 梳理了国内外仿生UG的发展现状, 提出了未来发展趋势[133]。其中, 西北工业大学朱崎峰等[134]根据UG运动原理设计了一种仿海龟扑翼UG, 打破了传统UG的外形设计。中国科学院自动化研究所的Wu等[135-137]先后为“海豚”UG提供了一种创新设计和水动力分析, 其运动原理参照UG进行设计。针对传统UG机动性较弱问题, 马峥等[138]通过引入仿生推进设计技术, 借助水平翼运动增加UG的前进速度, 该研究也为未来仿生UG的研制提供技术依据和理论指导。
现有仿生UG的功能特性仍然与真实生物存在很大差距, 但随着仿生结构、仿生材料、仿生控制、仿生能量和生物信息智能感知等领域的持续发展, 在融合仿生技术和人工智能技术的基础上, UG预计能够智能自主或协作完成各种复杂任务。
7.3 智能化UG技术
随着大数据分析、深度学习与人工智能等技术的发展, UG正向“智能一代”跃进, 因此, 智能化研发已经成为当前UG研发的必然趋势。人工智能技术必将成为UG等海洋高端装备为载体的未来海洋观测与探测系统的大脑[139]。美国是智能化海洋观测与探测技术的领导者, 欧洲也非常重视智能化海洋观测与探测技术的发展, 并着力推进以UG为载体的海洋观测与探测技术的发展。伴随着人工智能技术的飞速发展, 我国海军也越发注重人工智能的创新和应用, 并于2017年发布了装备预研创新项目指南, 其中人工智能技术成为重点。
随着深度学习技术的进步, 人工智能最近几年在智能感知识别领域取得了突破性的进展[140-141]。由于海洋环境的特殊性, 决定了UG面临着严峻的功耗、通信能力和计算能力的限制。因此, 发展UG人工智能技术, 可实现基于海洋环境场数据及UG自身的数据, 结合新兴发展的人工智能先进理论, 实现UG对海洋环境的准实时智能感知; 并在此基础上结合流体力学和机构学理论, 优化UG结构、性能及各种控制参量, 以增强其完成各种复杂海洋环境的探测和自主选择运行策略能力, 实现UG对海洋突发情况的应急处理和智能调节, 从而达到UG自主、安全、低能耗运行的目的。
综上所述, 着眼于人工智能技术和UG的发展, UG智能化发展趋势应是利用仿生、传感器、通信、互联网等技术手段, 自动感知和获取自身指标、海洋环境及网络中其他观测设备的信息和数据, 并基于计算机技术、自动控制技术和大数据处理分析技术, 实现其智能化运行, 并具有实时监测、分析成像以及智能管控等特征。
总之, UG系统在国内外已广泛应用, 在诸多方面也已显示了其重要的应用价值。但由于海洋环境的特殊性和复杂性, 决定了UG还面临着功耗高、通信能力和计算能力相对较弱等技术瓶颈。因此, 研究具有低功耗、大计算控制、智能感知、目标识别和协同组网观测等技术的UG, 将具有非常广阔的应用前景。在这些方面, 可变翼技术、仿生技术和人工智能等技术有显著的应用需求, 并具有较大的发展空间。
8 结束语
UG平台系统及其相关技术仍在高速发展中, 而为了满足我国海洋经济发展、灾害预防、海洋科学与国防科技等各类需求, 还需要进一步的研究UG平台及其协作组网观测技术。文中对现有UG单机核心技术、动力学与控制技术发展现状的归纳, 对UG编队与协作观测技术、数据格式与协议和适用于UG平台的传感器融合与集成技术应用等方面重要进展的总结, 及对未来UG技术发展方向的展望, 将有助于UG本体性能和应用领域的进一步扩展。
[1] Leonard N E, Paley D A, Lekien F, et al. Collective Motion, Sensor Networks, and Ocean Sampling[J]. Proceeding of the IEEE, 2007, 95(1): 48-74.
[2] Stommel H. The Slocum Mission[J]. Oceanography, 1989, 2(1): 22-25.
[3] Webb D C, Simonetti P J, Jones C P. SLOCUM: an Underwater Glider Propelled by Environmental Energy[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 447-452.
[4] Eriksen C C, Osse T J, Light R D, et al. Seaglider: a Long-Range Autonomous Underwater Vehicle for Oceanographic Research[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 424-436.
[5] Sherman J, Davis R E, Owens W B, et al. The Autonomous Underwater Glider “Spray”[J]. Oceanic Engineering IEEE Journal of, 2001, 26(4): 437-446.
[6] 王树新, 王延辉, 张大涛, 等. 温差能驱动的水下滑翔机设计与实验研究[J]. 海洋技术学报, 2006, 25(1): 1-5.
Wang Shu-xin, Wang Yan-hui, Zhang Da-tao, et al. Design and Trial on an Underwater Glider Propelled by Thermal Engine[J]. Ocean Technology, 2006, 25(1): 1-5.
[7] 王树新, 李晓平, 王延辉, 等. 水下滑翔器的运动建模与分析[J]. 海洋技术学报, 2005, 24(1): 5-9.
Wang Shu-xin, Li Xiao-ping, Wang Yan-hui, et al. Dynamic Modeling and Analysis of Underwater Gliders[J]. Ocean Technology, 2005, 24(1): 5-9.
[8] 秦玉峰, 张选明, 孙秀军, 等. 混合驱动水下滑翔机高效推进螺旋桨设计[J]. 海洋技术学报, 2016, 35(3): 40- 45.
Qin Yu-feng, Zhang Xuan-ming, Sun Xiu-jun, et al. Design of a High-Efficiency Propeller for Hybrid Drive Underwater Gliders[J]. Ocean Technology, 2016, 35(3): 40-45.
[9] Liu Y, Luan X, Song D, et al. Simulation for Path Planning of OUC-II Glider with Intelligence Algorithm [C]//Intelligent Robotics and Applications: 10th International Conference, ICIRA 2017. Wuhan: Springer, 2017: 801-812.
[10] 陈刚, 张云海, 赵加鹏. 基于混合模型的水下滑翔机最佳升阻比特性[J]. 四川兵工学报, 2014(2): 150-152.
Chen Gang, Zhang Yun-hai, Zhao Jia-peng. Optimum Lift-drag Ratio of the Underwater Glider Based on Mixture Models[J]. Journal of Sichuan Ordnance, 2014(2): 150-152.
[11] 马冬梅, 马峥, 张华, 等. 水下滑翔机水动力性能分析及滑翔姿态优化研究[J]. 水动力学研究与进展, 2007, 22(6): 703-708.
Ma Dong-mei, Ma Zheng, Zhang Hua, et al. Hydrodynamic Analysis and Optimization on the Gliding Attitude of the Underwater Glider[J]. Journal of Hydrodynamics, 22(6): 703-708.
[12] 李宝仁, 傅晓云, 杨钢, 等. 一种喷水推进型深海滑翔机: CN203581363U[P]. 2014-5-7.
[13] 倪园芳. 温差能驱动水下滑翔机性能的研究[D]. 上海: 上海交通大学, 2008.
[14] Yang C, Peng S, Fan S. Performance and Stability Analysis for ZJU Glider[J]. Marine Technology Society Journal, 2014, 48(3): 88-103.
[15] 田文龙, 宋保维, 刘郑国. 可控翼混合驱动水下滑翔机运动性能研究[J]. 西北工业大学学报, 2013, 31(1): 122-128.
Tian Wen-long, Song Bao-wei, Liu Zheng-guo. Motion Characteristic Analysis of a Hybrid-Driven Underwater Glider with Independently Controllable Wings[J]. Journal of Northwestern Polytechnical University, 2013, 31(1): 122-128.
[16] 杨豪, 陈济民, 初再宇. 圆碟形水下滑翔机的创新设计及应用前景[J]. 硅谷, 2015(4): 24-25.
[17] Schofield O, Kohut J, Aragon D, et al. Slocum Gliders: Robust and ready[J]. Journal of Field Robotics, 2010, 24(6): 473-485.
[18] Rudnick D L, Davis R E, Sherman J T. Spray Underwater Glider Operations[J]. Journal of Atmospheric and Oceanic Technology, 2016, 33(6): 1113-1122.
[19] Rudnick D L, Davis R E, Eriksen C C, et al. Underwater Gliders for Ocean Research[J]. Marine Technology Society Journal, 2004, 38(2): 73-84.
[20] Woithe H C, Chigirev I, Aragon D, et al. Slocum Glider Energy Measurement and Simulation Infrastructure[C]// Oceans 2010. Sydney: IEEE, 2010.
[21] Кожемякин И В, Блинков А П, Рождественский К В, etal. Перспективные Платформы Морской Робототехнической Системы И Некоторые Варианты Их Применения[J]. Известия Южного федерального университета. Технические науки, 2016(1): 174.
[22] Bachmayer R, Leonard N E, Graver J, et al. Underwater Gliders: Recent Developments and Future Applications [C]//International Symposium on Underwater Technology. Taipei: IEEE, 2004.
[23] Claustre H, Beguery L, Patrice P L A. SeaExplorer Glider Breaks Two World Records Multisensor UUV Achieves Global Milestones for Endurance, Distance[J]. Sea Technology, 2014, 55(3): 19-22.
[24] Wood S L, Mierzwa C E. State of Technology in Autonomous Underwater Gliders[J]. Marine Technology Society Journal, 2013, 47(5): 84-96.
[25] Alvarez A, Caffaz A, Caiti A, et al. Fòlaga: A Low-cost Autonomous Underwater Vehicle Combining Glider and AUV Capabilities[J]. Ocean Engineering, 2009, 36(1): 24-38.
[26] Ma W, Wang Y, Yang S, et al. Observation of Internal Solitary Waves Using an Underwater Glider in the Northern South China Sea[J/OL]. Journal of Coastal Research, 2018, (2018-03-27)[2018-03-28].https://doi.org/10.2112/JCOASTRES-D-17-00193.1.
[27] 刘方. 混合驱动水下滑翔机系统设计与运动行为研究[D]. 天津: 天津大学, 2014.
[28] Osse T J, Eriksen C C. The Deepglider: A Full Ocean Depth Glider for Oceanographic Research[C]//Oceans. Vancouver: IEEE, 2007: 1-12.
[29] Yu J, Jin W, Tan Z, et al. Development and Experiments of the Sea-Wing7000 Underwater Glider[C]//Anchorage, AK, USA: Oceans–Anchorage, 2017.
[30] Stephen. Autonomous Underwater Gliders[J]. InTech, 2009, 47(5): 84-96.
[31] D’Spain G L, Jenkins S A, Zimmerman R, et al. Underwater Acoustic Measurements with the Liberdade/X-Ray Flying Wing Glider[J]. Acoustical Society of America Journal, 2005, 117(4): 2624.
[32] Arima M, Tonai H, Yoshida K. Development of an Ocean-Going Solar-Powered Underwater Glider[C]//The Twenty-fourth International Ocean and Polar Engineering Conference. International Society of Offshore and Polar Engineers. Busan: International Society of Offshore and Polar Engineers, 2014: 444-448.
[33] Hildebrand J A, D'Spain G L, Roch M A, et al. Glider-based Passive Acoustic Monitoring Techniques in the Southern California Region[R]. La Jolla: Scripps Institution of Oceanography, 2009.
[34] 孙春亚, 宋保维, 王鹏. 翼身融合水下滑翔机外形优化设计[J]. 水下无人系统学报, 2017, 25(1): 68-75.
Sun Chun-ya, Song Bao-wei, Wang Peng. Shape Optimization Design of Blended-Wing-Body Underwater Glider[J]. Journal of Unmanned Undersea Systems, 2017, 25(1): 68-75.
[35] 何衍儒, 宋保维, 曹永辉. 基于Pareto最优的翼身融合水下滑翔机结构优化设计[J]. 水下无人系统学报, 2017, 25(3): 243-249.
He Yan-ru, Song Bao-wei, Cao Yong-hui. Structure Optimization Design for Underwater Glider with Blended-Wing-Body Based on Pareto Optimal Solution[J]. Journal of Unmanned Undersea Systems, 2017, 25(3): 243-249.
[36] Webb D C, Simonetti P J, Jones C P. SLOCUM: an Underwater Glider Propelled by Environmental Energy[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 447- 452.
[37] Lippsett L, Carlowicz M. “Green” Energy Powers Undersea Glider[EB/OL]. (2008-09-25)[2018-3-14]. http://www.whoi. edu/oceanus/feature/green-energy-powers-undersea-glider.
[38] Jones C, Webb D, Glenn S, et al. Slocum Glider Extending the Endurance[C]//The 16th International Symposium on Unmanned Untethered Submersible Technology. Durham: IEEE, 2009.
[39] Jones C, Allsup B, DeCollibus C. Slocum Glider: Expanding Our Understanding of the Oceans[C]//Oceans 2014. St. John's: IEEE, 2014.
[40] 王延辉, 王树新, 谢春刚. 基于温差能源的水下滑翔器动力学分析与设计[J]. 天津大学学报, 2007, 40(2): 133- 138.
Wang Yan-hui, Wang Shu-xin, Xie Chun-gang. Dynamic Analysis and System Design on an Underwater Glider Propelled by Temperature Difference Energy[J]. Journal of Tianjin University, 2007, 40(2): 133-138.
[41] 王延辉, 张宏伟, 武建国. 新型温差能驱动水下滑翔机系统设计[J]. 船舶工程, 2009, 31(3): 51-54.
Wang Yan-hui, Zhang Hong-wei, Wu Jian-guo. Design of a New Type Underwater Glider Propelled by Temperature Di- fference Energy[J]. Ship Engineering, 2009, 31(3): 51-54.
[42] Farid M M, Khudhair A M, Razack S A K, et al. A Review On Phase Change Energy Storage: Materials And Applications[J]. Energy Conversion & Management, 2004, 45(9): 1597-1615.
[43] Sharma A, Tyagi V V, Chen C R, et al. Review on Thermal Energy Storage with Phase Change Materials and Applications[J]. Renewable & Sustainable Energy Reviews, 2009, 13(2): 318-345.
[44] Verma P, Varun, Singal S. Review of Mathematical Modeling on Latent Heat Thermal Energy Storage Systems Using Phase-Change Material[J]. Renewable & Sustainable Energy Reviews, 2008, 12(4): 999-1031.
[45] Xia Q, Chen Y, Zang Y, et al. Ocean Profiler PowerSystem Driven by Temperature Difference Energy[C]//Anchorage, AK, USA:Oceans–Anchorage, 2017.
[46] Ma Z, Wang Y, Wang S, et al. Ocean Thermal Energy Harvesting with Phase Change Material for Underwater Glider[J]. Applied Energy, 2016, 178(C): 557-566.
[47] Zhang H W, Wang Y H, Lian Z G. Application and Improvement of the Interlayer Thermal Engine Powered by Ocean Thermal Energy in an Underwater Glider[C]//Power and Energy Engineering Conference. Wuhan: IEEE, 2009.
[48] Hine R, Willcox S, Hine G, et al. The Wave Glider: A Wave-Powered Autonomous Marine Vehicle[C]//Oceans 2009, MTS/IEEE Biloxi-Marine Technology for Our Future: Global and Local Challenges. Biloxi: IEEE, 2009.
[49] 桑宏强, 李灿, 孙秀军. 波浪滑翔器纵向速度与波浪参数定量分析[J]. 水下无人系统学报, 2018, 26(1): 16-22
Sang Hong-qiang, Li Can, Sun Xiu-jun. Quantitative Analysis on Longitudinal Velocity and Wave Parameter of Wave Glider[J]. Journal of Unmanned Undersea Systems, 2018, 26(1): 16-22
[50] Davis R E, Eriksen C C, Jones C P. Autonomous Buoyancy-Driven Underwater Gliders[M]//The Technology and Applications of Autonomous Underwater Vehicles, chapter 3. UK: CRC Press, 2002.
[51] ALSEAMAR. Seaexplorer[E/OL]. [2018-03-28]. https:// www.alseamar-alcen.com/products/underwater-glider/seaexplorer.
[52] Osse T J, Eriksen C C. The Deepglider: A Full Ocean Depth Glider for Oceanographic Research[C]//Oceans 2007. Vancouver: IEEE, 2007.
[53] Townsend N C, Shenoi R A. Feasibility Study of a New Energy Scavenging System for an Autonomous Underwater Vehicle[J]. Autonomous Robots, 2016, 40(16): 1-13.
[54] Asakawa K, Watare K, Ohuchi H, et al. Buoyancy Engine Developed for Underwater Gliders[J]. Advanced Robotics, 2016, 30(1): 41-49.
[55] Ma Z, Wang Y, Wang S, et al. Ocean Thermal Energy Harvesting with Phase Change Material for Underwater Glider[J]. Applied Energy, 2016, 178: 557-566.
[56] Alvarez A. Redesigning the SLOCUM Glider for Torpedo Tube Launching[J]. IEEE Journal of Oceanic Engineering, 2010, 35(4): 984-991.
[57] 金文明, 俞建成, 张奇峰, 等. 一种水下滑翔机用姿态调节装置: CN102050218B[P]. 2013-06-12.
[58] Niu W D, Wang S X, Wang Y H, et al. Stability Analysis of Hybrid-driven Underwater Glider[J]. China Ocean En- gineering, 2017, 31(5): 528-538.
[59] Yang Y, Liu Y, Zhang L, et al. Influence of the Propeller on Motion Performance of HUGs[C]//Oceans 2016. Shanghai: IEEE, 2016.
[60] Lei Z, Wang Y, Zhang L, et al. Uncertainty Behavior Research of Hybrid Underwater Glider[C]//Oceans 2016. Shanghai: IEEE, 2016.
[61] 秦玉峰, 孙秀军, 林兴华, 等. 水下滑翔机低速螺旋桨的推进效率[J]. 解放军理工大学学报(自然科学版), 2017, 18(1): 61-67.
Qin Yu-feng, Sun Xiu-jun, Lin Xing-hua, et al. Propulsive Efficiency of Low Rotation Propeller for Underwater Glider[J]. Journal of PLA University of Science and Tech- nology(Natural Science Edition), 2017, 18(1): 61-67.
[62] Wang S X, Sun X J, Wang Y H. Dynamic Modeling and Motion Simulation for A Winged Hybrid-Driven Underwater Glider[J]. China Ocean Engineering, 2011, 25(1): 97-112.
[63] Liu F, Wang Y, Niu W, et al. Hydrodynamic Performance Analysis and Experiments of a Hybrid Underwater Glider with Different Layout of Wings[C]//Oceans 2014. Taipei: IEEE, 2014.
[64] Guo S, Du J, Ye X, et al. Real-time Adjusting Control Method Based on Attitude Sensor Signal Feedback and Its Application in Spherical Underwater Vehicle[C]//2010 IEEE International Conference on Information and Automation (ICIS). Harbin: IEEE, 2010.
[65] Guo S, Du J, Ye X, et al. The Computational Design of a Water Jet Propulsion Spherical Underwater Vehicle[C]// 2011 IEEE International Conference on Mechatronics and Automation. Beijing: IEEE, 2011.
[66] Guo S, Du J, Ye X, et al. Realtime Adjusting Control Algorithm for the Spherical Underwater Robot[J]. International Journal on Information, 2010, 13(6): 2021-2029.
[67] Yue C, Guo S, Lin X, et al. Analysis and Improvement of The Water-Jet Propulsion System of a Spherical Underwater Robot[C]/International Conference on Mechatronics and Automation. Chengdu: IEEE, 2012.
[68] Guo S, Lin X, Tanaka K, et al. Develpoment and Control of a Vectored Water-jet-based Spherical Underwater Vehicle[C]//Information and Automation(ICIA), 2010 IEEE International Conference. Harbin: IEEE, 2012.
[69] Lin X, Guo S, Tanaka K, et al. Development and Evaluation of a Vectored Water-Jet-Based Spherical Underwater Vehicle[J]. International Journal on Information, 2010, 13(6): 1985-1998.
[70] Guo S, Lin X, Hata S. A Conceptual Design of Vectored Waterjet Propulsion System[C]//International Conference on Mechatronics and Automation. Changchun: IEEE, 2009.
[71] Lin X, Guo S, Hao Y, et al. A Simplified Dynamics Modeling of a Spherical Underwater Vehicle[C]//The 2008 IEEE International Conference on Robotics and Biomimetics. Bangkok: IEEE, 2008.
[72] Liu J, Wang Y H, Liu Y H, et al. Optimization Design for the Pressure Shell of Autonomous Underwater Glider Based on GDO Method[J]. Applied Mechanics & Materials, 2013, 312: 80-84.
[73] 王兵振, 朱光文, 任炜, 等. 水下滑翔机耐压壳体的设计与优化[J]. 海洋技术学报, 2008, 27(2): 9-11.
Wang Bing-zhen, Zhu Guang-wen, Ren Wei, et al. Design and Optimization of Pressure Case for Underwater Glider[J]. Ocean Technology, 2008, 27(2): 9-11.
[74] Song D L, Chen L P, Wang Y F, et al. Optimal Structure Design and Analysis of Pressure Hull for the Underwater Glider[J]. Advanced Materials Research, 2014, 850-851: 317-321.
[75] He Y, Song B, Dong H. Multi-Objective Optimization Design for the Multi-Bubble Pressure Cabin in BWB Underwater Glider[J]. International Journal of Naval Architecture&Ocean Engineering, 2017, 11[2018-03-28]. https: //doi.org/10.1016/j.ijnaoe.2017.08.007.
[76] Graver J G, Leonard N E. Underwater Glider Dynamics and Control[C]//12th International Symposium on Unmanned Untethered Submersible Technology. Durham: Autonomous Undersea Systems Institute (AUSI), 2001.
[77] Bhatta P, Leonard NE. Nonlinear Gliding Stability and Control for Vehicles with Hydrodynamic Forcing[J]. Automatica, 2008, 44(5): 1240–1250.
[78] Graver G J. Underwater Gliders: Dynamics, Control and Design[J]. Journal of Fluids Engineering, 2005, 127(3): 523-528.
[79] Bhatta P, Leonard N E. A Lyapunov Function for Vehicles with Lift and Drag: Stability of Gliding[C]//IEEE Conference on Decision and Control. Nassau: IEEE, 2004.
[80] Isa K, Arshad M R. Motion Simulation for Propeller-Driven USM Underwater Glider with Controllable Wings and Rudder[C]//2nd International Conference on Instrumentation Control and Automation. Bandung: IEEE, 2011.
[81] Isa K, Arshad M R. Dynamic Modeling and Characteristics Estimation for USM Underwater Glider[C]//Control and System Graduate Research Colloquium(ICSGRC). Shah Alam: IEEE, 2011.
[82] Noh M M, Arshad M R, Mokhtar R M. Modeling of USM Underwater Glider(USMUG)[C]//International Conference on Electrical, Control and Computer Engineering. Pahang: IEEE, 2011.
[83] Tian B, Yu J, Zhang A, et al. Dynamics Analysis of Wave-Driven Unmanned Surface Vehicle in Longitudinal Profile[C]//Oceans 2014. Taipei: IEEE, 2014.
[84] Ma Z, Zhang H, Zhang N, et al. Study on Energy and Hydrodynamic Performance of the Underwater Glider[J]. Journal of Ship Mechanics, 2006, 10(3): 53-60.
[85] 胡仞与. 水下滑翔机垂直面运动研究[D]. 上海: 上海交通大学, 2008.
[86] 陈宇航, 高剑, 杜亮. 水下滑翔机建模与纵向运动控制[J]. 火力与指挥控制, 2012, 37(4): 141-145.
Chen Yu-hang, Gao Jian, Du Liang. Modeling and Vertical Motion Control of Underwater Glider[J]. Fire Control & Command Control, 2012, 37(4): 141-145.
[87] 张福斌, 汪刚, 陈宇航, 等. 水下滑翔机建模与运动PID控制[J]. 鱼雷技术, 2011, 19(2): 114-119.
Zhang Fu-bin, Wang Gang, Chen Yu-hang, et al. Modeling and PID Control of Underwater Glider Motion[J]. Torpedo Technology, 2011, 19(2): 114-119.
[88] Kan, L, Zhang, Y, Fan, H, et al. MATLAB-Based Simulation of Buoyancy-Driven Underwater Glider Motion[J]. Journal of Ocean University of China, 2008, 7(1): 113-118.
[89] Mahmoudian N, Geisbert J, Woolsey C. Approximate Analytical Turning Conditions for Underwater Gliders: Implications for Motion Control and Path Planning[J]. IEEE Journal of Oceanic Engineering, 2010, 35(1): 131-143.
[90] Mahmoudian N, Woolsey C. Underwater Glider Motion Control[C]//Decision and Control, 2008. CDC 2008. 47th IEEE Conference. Cancun: IEEE, 2008.
[91] Zhang S, Yu J, Zhang A, et al. Steady Three Dimensional Gliding Motion of an Underwater Glider[C]// Robotics and Automation (ICRA), 2011 IEEE International Conference. Shanghai: IEEE, 2011.
[92] 何漫丽. 水下自航行器水动力学特性数值计算与试验研究[D]. 天津: 天津大学, 2005.
[93] 武建国. 混合驱动水下滑翔机系统设计与性能分析[D]. 天津: 天津大学, 2010.
[94] Wang S, Sun X, Wang Y, et al. Dynamic Modeling and Motion Simulation for a Winged Hybrid-Driven Under- water Glider[J]. China Ocean Engineering, 2011, 25(1): 97-112.
[95] Isa K, Arshad M R. Modeling and Motion Control of a Hybrid-Driven Underwater Glider[J]. Indian Journal of Geo-Marine Sciences, 2013, 42(8): 971-979.
[96] Gao L, Li B, Gao L. Physical Modeling for the Gradual Change of Pitch Angle of Underwater Glider in Sea Trial[J/OL]. IEEE Journal of Oceanic Engineering, 2017, 11: 1-8 (2017-11-27)[2018-03-28]https://doi.10.1109/JOE.2017.2769918.
[97] Leonard N E, Graver J G. Model-based Feedback Control of Autonomous Underwater Gliders[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 633-645.
[98] Zhang F. Cyber-Maritime Cycle: Autonomy of Marine Robots for Ocean Sensing[J]. Foundations and Trends in Robotics, 2016, 5(1): 1-115.
[99] Paley D, Zhang F, Leonard N E. Cooperative Control for Ocean Sampling: The Glider Coordinated Control System[J]. IEEE Transactions on Control System Technology, 2008, 16(4): 735-744.
[100] 王延辉. 水下滑翔器动力学行为与鲁棒控制策略研究[D]. 天津: 天津大学, 2007.
[101] Xiang X, Yu C, Lapierre L, et al. Survey on Fuzzy- Logic-Based Guidance and Control of Marine Surface Vehicles and Underwater Vehicles[J]. International Journal of Fuzzy Systems, 2018, 20(2): 572-586.
[102] Fan S, Woolsey C A. Dynamics of Underwater Gliders in Currents[J]. Ocean Engineering, 2014, 84(84): 249-258.
[103] 马冬梅, 马峥, 张华, 等. 水下滑翔机水动力性能分析及滑翔姿态优化研究[J]. 水动力学研究与进展, 2007, 22(6): 703-708.
[104] Claus B, Bachmayer R, Cooney L. Analysis and Development of a Buoyancy-Pitch Based Depth Control Algorithm for a Hybrid Underwater Glider[C]//Autonomous Underwater Vehicles, 2012 IEEE/OES. Southampton: IEEE, 2012.
[105] 杨海. 考虑输入受限的水下滑翔机前馈控制设计[J]. 中国舰船研究, 2014, 9(6): 87-91.
Yang Hai. Feedforward Control Design for Autonomous Underwater Gliders Under Input Constraints[J]. Chinese Journal of Ship Research, 2014, 9(6): 87-91.
[106] 白乐强, 邢建生, 唐元贵. 基于逆模型的混合驱动水下滑翔机垂直面控制[J]. 计算机测量与控制, 2015, 23(10): 3357-3360.
Bai Le-qiang, Xing Jian-sheng, Tang Yuan-gui. Longitudinal Control for Hybrid-driven Underwater Glider Based on Inverse System[J]. Computer Measurement & Control, 2015, 23(10): 3357-3360.
[107] Curtin T B, Bellingham J G, Catipovic J, et al.Autonomous Oceanographic Sampling Networks[J]. Oceanography, 1989, 6(3): 86-94.
[108] Leonard N E, Paley D A, Lekien F, et al. Collective Motion, Sensor Networks and Ocean Sampling[J]. Proceeding of the IEEE, 2007, 95(1): 48-74.
[109] Fiorelli E, Leonard N E, Bhatta P, et al. Multi-AUV Control and Adaptive Sampling in Monterey Bay[J]. IEEE Journal of Oceanic Engineering, 2006, 31(4): 935-948.
[110] Paley D A, Zhang F, Leonard N E. Cooperative Control for Ocean Sampling: The Glider Coordinated Control System[J]. IEEE Transactions on Control Systems Technology, 2008, 16(4): 735-744.
[111] Peng Z, Wang D, Wang H, et al. Distributed Coordinated Tracking of Multiple Autonomous Underwater Vehicles[J]. Nonlinear Dynamics, 2014, 78(2): 1261-1276.
[112] Xue D Y, Wu Z L, Wang Y H, et al. Coordinate Control, Motion Optimization and Sea Experiment of a Fleet of Petrel-II Gliders[J]. Chinese Journal of Mechanical Engineering, 2018, 31(1): 17.
[113] Fratantoni D M, Haddock S H D. Introduction to the Autonomous Ocean Sampling Network(AOSN-II) Program[J]. Deep Sea Research Part II Topical Studies in Oceanography, 2009, 56(3-5): 61.
[114] Grund M, Freitag L, Preisig J, et al. The PLUSNet Underwater Communications System: Acoustic Telemetry for Undersea Surveillance[C]//Oceans 2006, Boston: IEEE, 2006.
[115] Harlan J, Terrill E, Hazard L, et al. The Integrated Ocean Observing System High-Frequency Radar Network: Status and Local, Regional, and National Applications[J]. Ma- rine Technology Society Journal, 2010, 44(6): 122-132.
[116] Wall C C, Lembke C, Mann D A. Shelf-scale Mapping of Sound Production by Fishes in the Eastern Gulf of Mexico, Using Autonomous Glider Technology[J]. Marine Ecology Progress, 2012, 449(449): 55-64.
[117] Baumgartner M F, Fratantoni D M, Hurst T P, et al. Real-time Reporting of Baleen Whale Passive Acoustic Detections from Ocean Gliders[J]. Journal of the Acoustical Society of America, 2013, 134(3): 1814-1823.
[118] Guerra L A A, Soares-Filho W, Barreira L M, et al. Brazil Offshore Underwater Acoustic Noise Monitoring Using Autonomous Marine Vehicle[C]//XII ETAS-Encontro de Tecnologia em Acústica Submarina. Rio de Janeiro: XII ETAS- Encontro de Tecnologia em Acústica Submarina. 2016, 11-8-10.
[119] Uffelen L J V, Roth E H, Howe B M, et al. A Seaglider- Integrated Digital Monitor for Bioacoustic Sensing[J]. IEEE Journal of Oceanic Engineering, 2017, 42(4): 800-807.
[120] Wall C C, Mann D A, Lembke C, et al. Mapping the Soundscape Off the Southeastern USA by Using Passive Acoustic Glider Technology[J]. Marine & Coastal Fish- eries, 2017, 9(1): 23-37.
[121] Liu L, Xiao L, Lan S Q, et al. Using Petrel II Glider to Analyze Underwater Noise Spectrogram in the South China Sea[J]. Acoustics Australia, 2018(2): 1-8.
[122] Wolk F, Lueck R G, Laurent L S. Turbulence Measurements from a Glider[C]//Oceans 2009, MTS/IEEE Biloxi-Marine Technology for Our Future: Global and Local Challenges. Biloxi: IEEE, 2009.
[123] Rudnick D L, Johnston T M S, Sherman J T. HighFrequency Internal Waves Near the Luzon Strait Observed by Underwater Gliders[J]. Journal of Geophysical Resear- ch Oceans, 2013, 118(2): 774-784.
[124] Schultze L K P, Merckelbach L M, Carpenter J R. Turbulence and Mixing in a Shallow Shelf Sea From Underwater Gliders[J]. Journal of Geophysical Research Oceans, 2017, 122(11): 9092-9109.
[125] Meyer D. Glider Technology for Ocean Observations: A Review[J]. Ocean Science Discussions, 2016: 1-26(2016-07-01) [2018-03-28]. https://doi.org/10.5194/os-2016-40,2016.
[126] Smith R N, Schwager M, Smith S L, et al. Persistent Ocean Monitoring with Underwater Gliders: Adapting Sampling Resolution[J]. Journal of Field Robotics, 2011, 28(5): 714-741.
[127] Testor P, Mortier L, Karstensen J, et al. EGO: Towards a Global Glider Infrastructure for the Benefit of Marine Research and Operational Oceanography[J]. Mercator Ocean-Coriolis Quarterly Newsletter, 2012(45):12-15.
[128] Arima M, Ichihashi N, Ikebuchi T. Motion Characteristics of an Underwater Glider with Independently Controllable Main Wings[C]//Oceans 2008-MTS/IEEE Kobe Techno-Ocean. Kobe: IEEE, 2008: 1-7.
[129] Arima M, Sumino W, Toyoda A, et al. 4 Feasibility Study of an Underwater Glider with Independently Controllable Main Wings(1st report): Development of an Experimental Underwater Glider[J]. Journal of the Japan Society of Naval Architects and Ocean Engineers, 2006(4): 31-37.
[130] Angilella A J, Gandhi F, Lear M. Wing Camber Variation of an Autonomous Underwater Glider[C]//Kissimmee: Aiaa/ahs Adaptive Structures Conference, 2018.
[131] 周骥平, 武立新, 朱兴龙. 仿生扑翼飞行器的研究现状及关键技术[J]. 机器人技术与应用, 2004(6): 12-17.
[132] Yang Z, Wang Y, Wu Z, et al. Mechanism Design of Controllable Wings for Autonomous Underwater Gliders[C]// Oceans 2014-Taipei. Taipei: IEEE, 2014: 1-5.
[133] 王田苗, 杨兴帮, 梁建宏. 中央鳍/对鳍推进模式的仿生自主水下机器人发展现状综述[J]. 机器人, 2013, 35 (3): 352-362.
Wang Tian-miao, Yang Xing-bang, Liang Jian-hong. A Survey on Bionic Autonomous Underwater Vehicles Propelled by Median and/or Paired Fin Mode[J]. Robot, 2013, 35(3): 352-362.
[134] 朱崎峰, 宋保维, 丁浩, 等. 一种仿海龟扑翼推进机构设计[J]. 机械设计, 2011, 28(5): 30-33.
Zhu Qi-feng, Song Bao-wei, Ding Hao, et al. Design of a New Propulsion Mechanism of Imitation Turtles Flapping-Wing[J]. Journal of Machine Design, 2011, 28(5): 30-33.
[135] Wu Z, Yu J, Yuan J, et al. Mechatronic Design and Implementation of a Novel Gliding Robotic Dolphin[C]// Robotics and Biomimetics(ROBIO), 2015 IEEE International Conference. Zhuhai: IEEE, 2015: 267-272.
[136] Li K, Yu J, Wu Z, et al. Hydrodynamic Analysis of a Gliding Robotic Dolphin Based on Computational Fluid Dynamics[C]//Control Conference(CCC), 2016 35th Chinese. Chengdu: IEEE, 2016: 6008-6013.
[137] Wu Z, Yu J, Yuan J, et al. Analysis and Verification of a Miniature Dolphin-like Underwater Glider[J]. Industrial Robot, 2016, 43(6): 628-635.
[138] 马峥, 李永成, 潘定一, 等. 水下滑翔机仿生推进水动力学特性研究[C]//第十四届全国水动力学学术会议暨第二十八届全国水动力学研讨会文集(上册). 长春: 全国水动力学研讨会, 2017.
[139] 권영주; Mo, Kang Gil; 박세헌, et al. The Fourth Industrial Revolution and Marine Technology[J]. Innovation studies, 2017, 12(2): 203-222.
[140] 刘欣. 基于智能感知的机器人交互技术研究[D]. 广州:华南理工大学, 2016.
[141] Ma W, Zhang X, Yin G. Design on Intelligent Perception System for lower limb rehabilitation exoskeleton robot[C]//Ubiquitous Robots and Ambient Intelligence (URAI), 2016 13th International Conference. Xi’an: IEEE, 2016: 587-592.
(责任编辑: 陈 曦)
Development of Underwater Gliders:An Overview and Prospect
SHEN Xin-rui1,2, WANG Yan-hui1,2*, YANG Shao-qiong1,2, LIANG Yan1,2, LI Hao-zhang1,2
(1. School of Mechanical Engineering, Tianjin University, Tianjin 300350, China; 2. The Joint Laboratory of Ocean Observing and Detection, Qingdao National Laboratory for Marine Science and Technology, Qingdao 266237, China)
As a kind of special autonomous undersea vehicle, the underwater glider(UG) dives along a saw-tooth trajectory by adjusting the buoyancy and maintains its gliding mode by making use of hydrodynamic force. It can realize continuous observation and detection in long range and large scale in the complex ocean environment. Therefore, UG plays an increasingly important role in the novel global ocean observation and detection systems. In this paper, the recent development status of underwater glider technology both at home and abroad is reviewed with emphases on the research progress of the single UG platforms and the corresponding core techniques. And the studies on UG’s dynamics and control are summarized. Moreover, according to the representative research achievements in the world, this paper gives an overview of the UG-networked observation technology, and elaborates the design, development and application of the compact low-power sensor used in UGs, as well as the development in data format and protocol of UG. In addition, development prospect of UG technology is presented concerning promotion of power consumption optimization, communication and intelligent level of UGs.
underwater glider(UG); networking observation technology; sensor design; data format and protocol; intellisense
TJ630; TP242
A
2096-3920(2018)02-0089-18
10.11993/j.issn.2096-3920.2018.02.001
沈新蕊, 王延辉, 杨绍琼, 等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报, 2018, 26(2): 89-106.
2018-03-28;
2018-04-30.
国家重点研发计划(2016YFC0301100, 2017YFC0305902); 国家自然科学基金优秀青年科学基金(51722508)、面上项目(51475319); 山东省重点研发计划(2016CYJS02A02); 青岛海洋科学与技术国家实验室问海计划(ZR2016WH03)、主任基金(QNLM201705)和“鳌山人才”培养计划(2017ASTCP-OS05, 2017ASTCP-OE01)等项目资助.
王延辉(1979-), 男, 博士, 教授, 主要研究方向为水下航行器研制及其海试应用.
猜你喜欢
军事文摘(2021年16期)2021-11-05
知识就是力量(2019年7期)2019-07-01
军事文摘(2018年24期)2018-12-26
军事文摘(2018年24期)2018-12-26
琴童(2017年7期)2017-07-31
中国化妆品(2017年12期)2017-06-27
小学科学(2017年5期)2017-05-26
太空探索(2016年7期)2016-07-10
课堂内外(小学版)(2016年3期)2016-04-05
太空探索(2015年8期)2015-07-18