
应用契贝谢夫四杆机构的四足机器人仿真分析
2018-05-05 07:02韶关学院物理与机电工程学院翁杰弟余彦峰刘烁超李湘勤
智能制造 2018年11期
韶关学院 物理与机电工程学院 翁杰弟 余彦峰 刘烁超 李湘勤
一、引言
在机械设计制造方面常运用仿真技术来做出新的突破,所谓仿真技术就是通过计算机仿真软件在计算机上建模,然后通过各种接受装置接收各类动能形态参数分析来优化样机方案。其中在CAD/CAM/CAE 技术及多体系统动力学基础上发展起来的系统级的产品建模、仿真与分析技术,综合了取得突破性进展的多领域物理系统建模与仿真技术,形成了功能化虚拟样机技术。虚拟样机技术可使设计人员在各种虚拟环境中真实的模拟产品整体的运动及受力情况,快速分析多种设计方案,进行对物理样机而言难以进行或根本无法进行的试验,获得系统的最佳设计方案为止[1-4]。用虚拟样机替代物理样机验证设计时,不但可以缩短开发周期,而且设计效率也得到了提高。
本文通过三维建模软件SolidWorks 建立四足机器人三维模型,将建立的三维模型导入到动力学软件ADAMS 虚拟仿真平台中构建四足机器人的虚拟样机模型,实现四足机器人进行静力和动力学仿真研究,以期获得四足机器人在运动中的各项运动学和力学参数。
二、契贝谢夫连杆机构
契贝谢夫(Chebyshev)机构是一类特殊的四杆机构,当连架杆或机架的长度发生变化时,会引起连杆的运动轨迹发生相应改变[5]。图1 是契贝谢夫机构的结构简图,连杆3与连杆2 和连杆4 一端铰接,连杆2 和连杆4 另一端分别铰接在机架1 上,C 为连杆上的一点。通过调整杆AB、BE、ED、AD 和EC 的长度可使C 点的轨迹发生变化。在实际中用解析法困难较大,且计算量巨大,直观性差,利用仿真软件快速、高效求解该构件的各项参数,并根据分析结果优化设计。
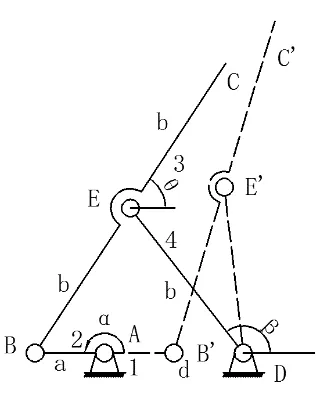
图1 契贝谢夫四杆机构简图
三、基于ADAMS 和SolidWorks 的四足机器人运动仿真
ADAMS/View 可以进行简单的三维建模,但对于连杆较多的机构进行建模、定位、添加约束时,容易出错,也很繁琐[5]。因此,利用SolidWorks 辅助进行三维建模。根据杆长条件先设定BE=DE=100,对机构进行建模,仿真拟合运动轨迹,对比不同长度比例下的迈步轨迹曲线,最终设定BE:DE:AD:AB=1:1:0.8:0.4 为机构的杆长比例,此时具有较好的迈步轨迹曲线。利用上述杆长比例关系确定其他两杆的长度。利用各杆长数据进行建模仿真得到机构的运动轨迹近似于半月形,有一段较为平缓的运动,两边的运动轨迹对称,可较真实地模拟动物的迈步动作。
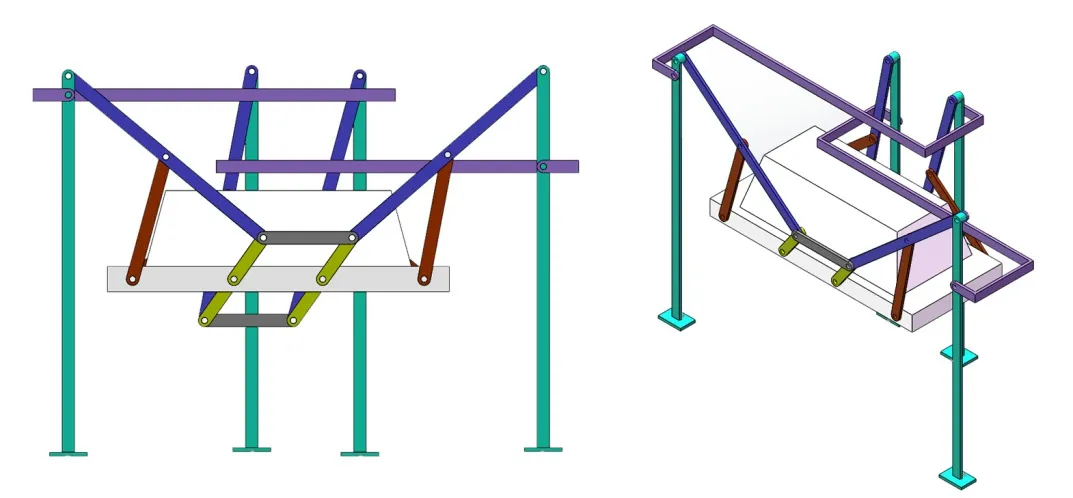
图2 四足机器人三维模型
根据已确定的各杆长尺寸,建立四足机器人的三维模型,如图2 所示。将模型导入到ADAMS,调整工作环境使模型置于恰当的工作界面中,然后添加约束并对约束命名,如图3 所示。
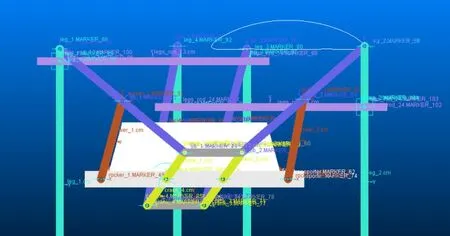
图3 ADAMS 环境下的四足机器人模型
四、运动仿真
四足机器人机构设计后进行相应的仿真分析,包括机器人的理论悬空运动仿真和实际接触地面运动仿真时的轨迹、足部加速度和动能分析。
1.四足机器人理论悬空运动仿真分析
在曲柄上添加一个驱动电机,并设定以60 deg/s 的驱动使曲柄匀速转动,设定好仿真时间为24s,步数为500。选取右前足上的一点做出它的运动轨迹。如图4 所示是足部的运动轨迹。测量右前足的X 方向和Y 方向的位移,速度,加速度,角速度和角加速度变化曲线。
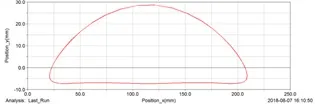
图4 机构腿部运动轨迹
从图4 的运动轨迹可以看出,机构运行时腿部做踏步动作。X 方向的位移范围为[20.9293,209.0723],因此X方向腿部的行程为188.142mm,即步长为188.142mm。Y 方向的位移范围为[-7.2477,28.7108],因此Y 方向腿部的行程为35.9585mm,即步高为35.9585mm。速度的变化范围为[15.4076,204.606]mm/s,加速度的变化范围为[0.3651,318.1257]mm/s2。从图5 可以看出,腿部在6s 时速度和加速度波动不大,保证了机构在在地面步行时较为平稳。在4.16 ~6.08s 时速度和加速度波动很大,保证了机构在地面上方抬步时速度快,效率高。
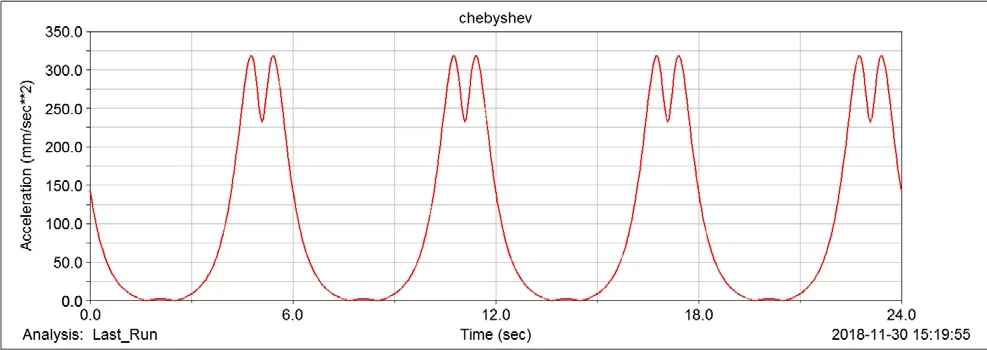
图5 机构腿部线加速度
2.四足机器人实际接触地面运动仿真
在上述的基础上,用ADAMS 的建模功能在四足机器人的足底部添加一块较大的地面并添加固定副,然后删除在transporter 上的固定副,如图6 所示。
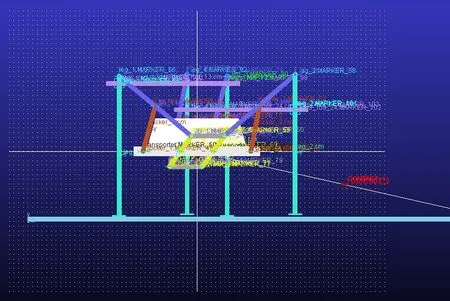
图6 ADAMS 环境下的四足机器人模型和地面
由于实体接触运动需要有接触力即摩擦力才能实现运动,由可知,需要添加静摩擦系数和重力加速度。设定构件的密度,并根据体积自动求出质量。同样在曲柄上添加一个驱动电机,并设定以60 deg/s 的驱动使曲柄匀速转动,设定好仿真时间为24s,步数为500。选取leg_2 上的一点做出它的运动轨迹。测出腿部的加速度如图7所示,并做分析对比。
从图7 中可看出四足机器人的腿部速度基本呈现周期性的变化,与在理论悬空中运动的图5 对比,在2.9s 和5.9s的时候速度突然极具增加,这是由于机器人自身的重力对对侧的腿和该腿产生的重力加速度,对地面产生碰撞所引起的速度和加速度的突变。对机器人的行走影响不大,但对机构会产生较大的冲击振动,可在腿部加吸振缓存的装置减小该弊端。
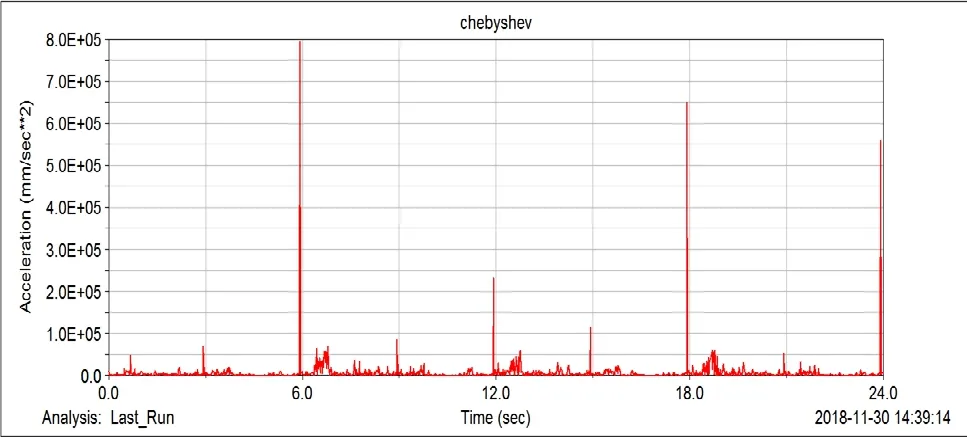
图7 实际接触地面时腿部的加速度
选取机架transporter 的质心做出其此次仿真的运动轨迹,并测量出质心的加速度、角速度,处理完后的图像如图8 所示,并做图像分析对比。从图8 中可看出四足机器人的机架速度和加速度同样基本呈现周期性的变化,在1.924 ~3.081s 之间发生了较大的速度和加速度的突变,在3.081s ~4.865s 时机架的速度和加速度变化不大,运行较为平稳,速度平均为44.56mm/s,加速度平均为56.32mm/s2。同样引起该机构的速度和加速度突变的原因也是机器人整体的重力加速度和对地面的刚性冲击振动。在机器人运载物品时会有冲击振动,但总体来说能够较为平稳的运送。
图8 实际接触地面时机架的加速度
五、分析结果
由两次在不同的运动仿真中的对比,在理论情况下契贝谢夫机构所组成的四足机器人能够实现近似动物迈步的运动,迈步平稳,速度、加速度、角速度和角加速度都呈现有规律的周期性变化。而在实际接触地面的运动仿真中,由于机械结构的刚性、重力和接触碰撞,不能像动物般通过自身的柔性和重心的调节来消除该四足机器人做直线运动时的速度、加速度、角速度和角加速度的突变。
六、结论
本文使用了三维建模软件SolidWorks 对运用契贝谢夫机构的四足机器人进行了建模,减少了在ADAMS 中的直接建立虚拟样机模型的工作量。并用动力学仿真软件ADAMS,通过对模型的导入,添加约束和驱动,模拟仿真了四足机器人在理论悬空时和实际接触地面时的两种不同的运动情况。并绘制出其在这两种不同情况下的运动轨迹、加速度曲线,并通过对比分析,发现实际接触地面时图像的突变,并分析原因提出减小突变的方法。从而证明了在地面行走的可行性。也证实了利用ADAMS 使得运动仿真可视化强、数据精确,可有效地对产品进行设计分析。
猜你喜欢
玩具世界(2022年2期)2022-06-15
装备制造技术(2020年2期)2020-12-14
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代装饰(2018年5期)2018-05-26
汽车实用技术(2017年16期)2017-09-21
中国三峡(2017年2期)2017-06-09
恋爱婚姻家庭·养生版(2015年9期)2015-05-14
机械工程师(2015年10期)2015-02-02
中国全科医学(2013年26期)2013-01-25
