
Festo 仿生家族
——从飞狐到手臂
2018-05-05 07:02
智能制造 2018年11期
Festo 是一家领先的国际性自动化技术供应商,致力于研发智能化和便捷的解决方案,也是工业培训和教育项目的领先者。
多年来Festo 一直为工厂和流程自动化提供动力,并通过研究项目共同塑造未来生产系统。为此,研究项目深入钻研机电一体化的最新开发、先进仿真技术、微系统技术,以及工业4.0 智能组件。Festo 的创新管理为先进理念、知识与技术向在市场中取得成功的产品的转化创造必要的框架条件。
在工厂日常活动中,自动化技术承担典型的任务,例如物料的抓取、运动和定位以及控制和调节工艺过程。自然界理所当然、简单和节能地完成所有这些任务。什么还能比观察自然现象和从中学习更方便呢?因此,Festo 已与著名高校和研究所、开发公司和私人发明人建立了一个联合体:仿生学习网络。
BionicFlyingFox 运用智能运动学的超轻型飞行物
为了研发BionicFlyingFox,Festo 仿生学习网络的开发人员仔细研究了狐蝠这种生物,并以技术手段模拟了它独特的飞行模式。通过集成机载电子板与一个外置运动追踪系统的相互配合,超轻型飞行物能够在特定空间内进行半自主飞行。
狐蝠(英文:flying fox)是蝙蝠的一种。蝙蝠是唯一可以主动飞行的哺乳动物。狐蝠的一个典型特征是它精细且富有弹性的翼膜,从延长的前掌骨与指骨一直延伸至脚关节。在飞行时,狐蝠能用手指有针对性地控制翼膜的曲率,从而能够以符合空气动力学的方式在空中灵活飞行。这样一来,即使在慢速飞行时,它们也能获得最大升力。
模拟自然样本的灵活运动学
人造狐蝠两翼展开宽度为228 厘米,体长为87 厘米,整体仅重580 克。就如自然界的狐蝠一样,人造狐蝠的翼动力学也由手肘两个关节组成,上面绷了一层有弹性的翼膜,翼膜从两翼一直延伸至后肢。如此一来,人造狐蝠两翼的面积相对较大,并能实现极小的翼负载。与自然界的狐蝠一样,BionicFlyingFox 的所有关节点也都处于同一平面,以便它可以单独控制机翼以及折叠双翼。
专门研制的翼膜
该仿生模型的翼膜极薄、超轻、但却十分强韧。它由两片气密薄膜和一块氨纶织物组成,它们通过约45000 个焊接点紧密地焊接在一起。由于翼膜具有足够的弹性,即使在收起双翼时,它们也几乎没有褶皱。织物的蜂窝结构防止翼膜上的小裂纹进一步扩大。因此,即使翼膜出现轻微损伤,BionicFlyingFox 自己仍能继续飞行。
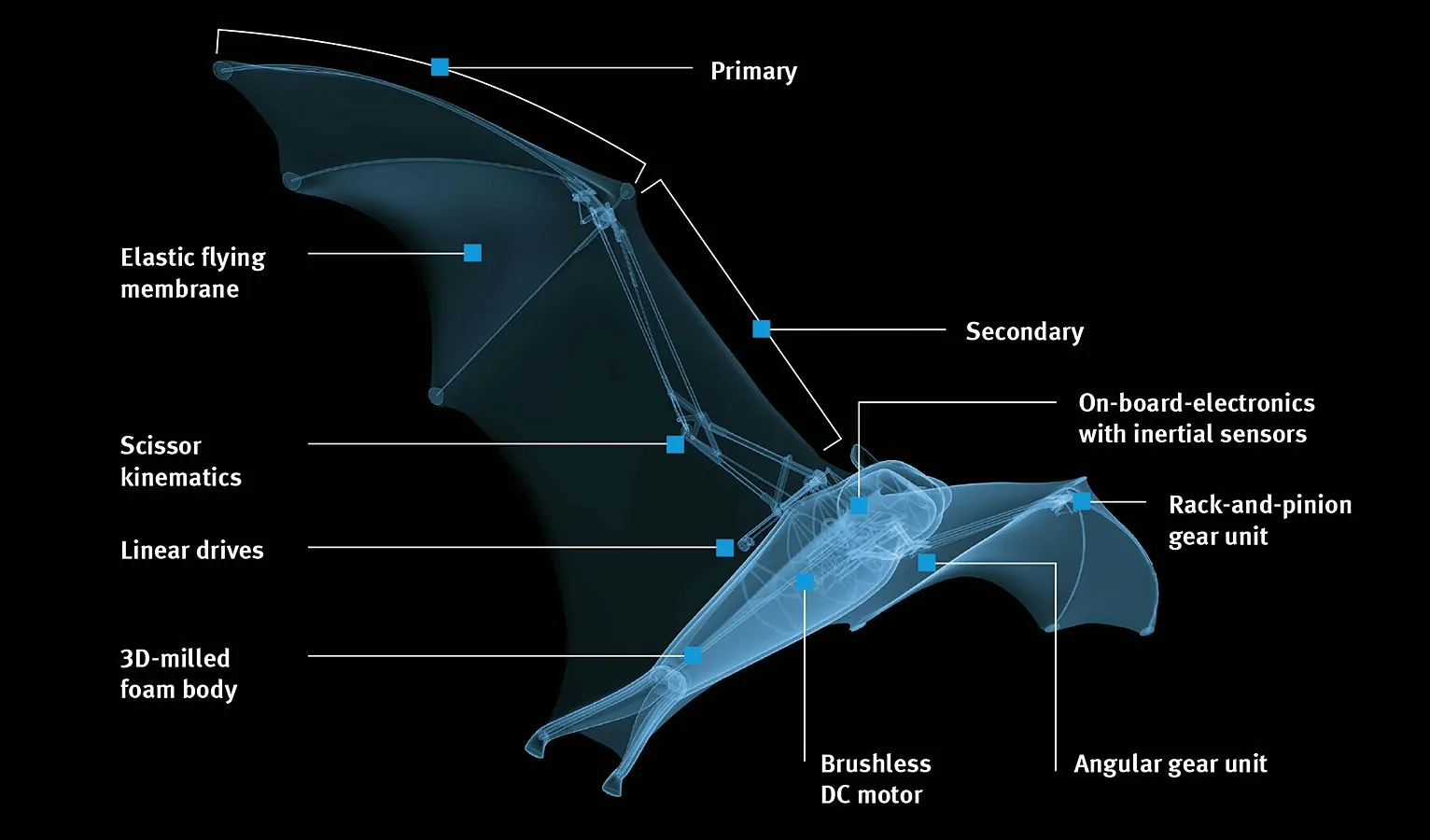
精巧的结构:机身内置的机载电子板与两翼中的机械构造相互配合
在特定空间内进行半自主飞行
为了能使BionicFlyingFox 在特定空间内进行半自主飞行,它需要与所谓的运动追踪系统通讯。运动追踪系统能够持续检测它的位置。同时系统还能规划飞行轨迹,并提供必要的控制指令。人可以手动控制飞行物的起飞与降落。在飞行中,自动驾驶仪掌管飞行任务。

可移动式照相系统进行精确定位
运动追踪系统的重要组成部分是两台红外相机,它们被安装在一个可摇摆可倾斜的云台上。如此,相机便可以随意转动或倾斜,以便能从地面开始追踪BionicFlyingFox 的整个飞行过程。借助附着于两翼与两条后肢的四个特殊红外标记,相机能够识别人造狐蝠的运动。



对理想飞行轨迹进行机器学习
相机捕捉的图像传送至中央主机。中央主机评估数据,并像外部领航员一样协调飞行。为此,中央主机上具有预编制的飞行路径,能够预先确定BionicFlyingFox 飞行时的轨迹。为了能以最佳方式按照规定路径飞行,人造狐蝠可借助它的机载电子板与复杂的行为模式自行计算必要的机翼运动。
人造狐蝠从中央主机处获得必要的控制算法,主机能对算法进行机器学习,算法也能被不断改进。通过这种方式,BionicFlyingFox 可在飞行中优化飞行行为,更精准地沿着既定轨道继续绕圈飞行。此外,通过后肢的运动与由此调节的机翼表面能够对飞行进行操控。

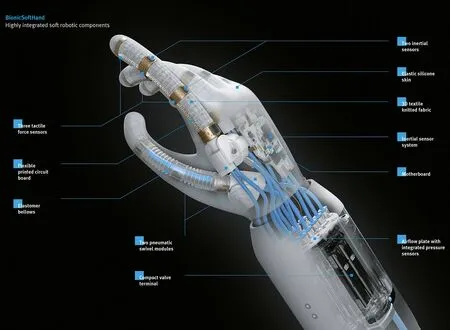
BionicSoftHand 气动机械手与人工智能
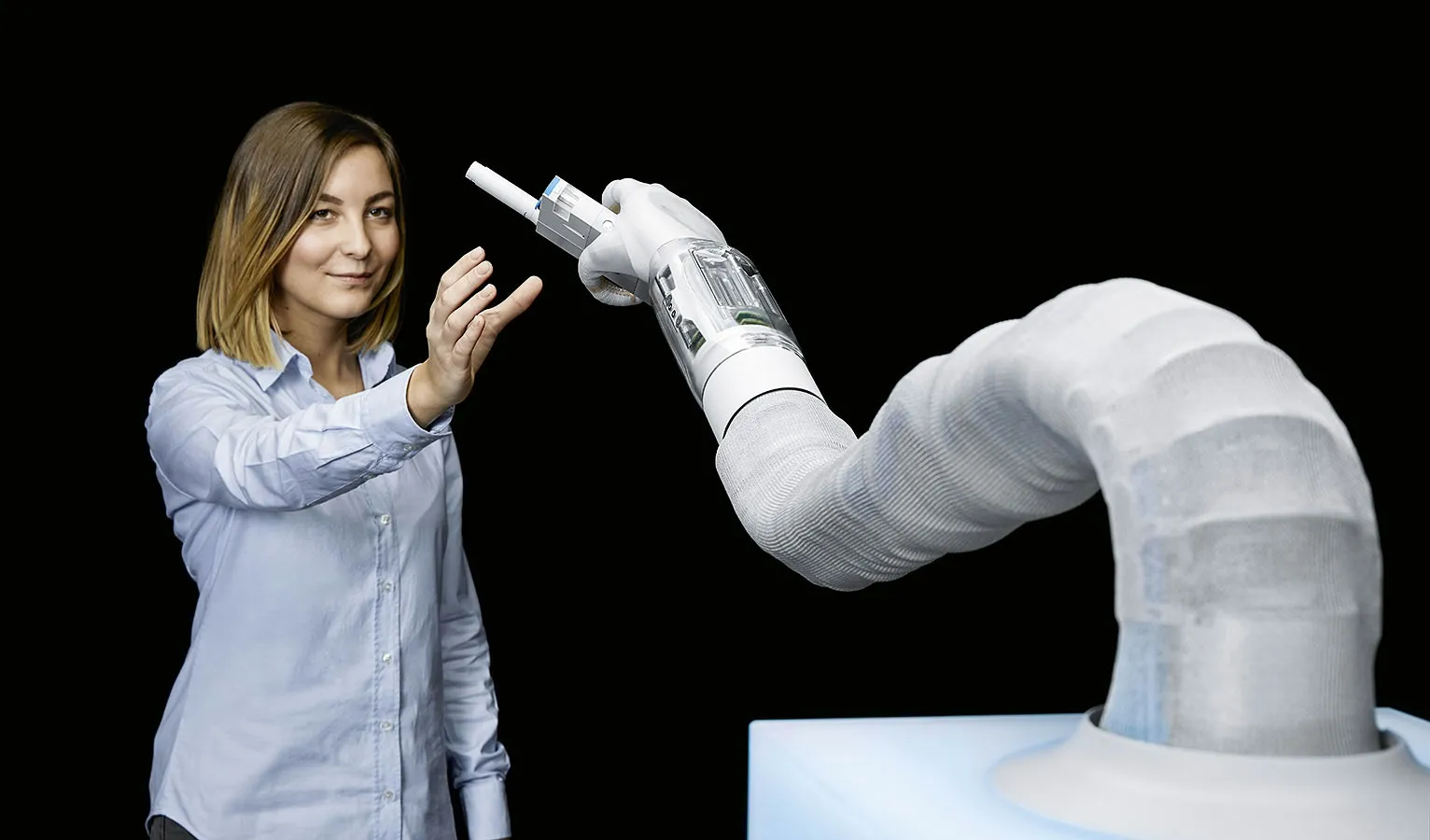
无论是抓、握还是旋转、触摸、敲击或者按压——日常生活中,我们都会用手完成这些各式各样的动作。人手是大自然真正的杰作——一种多么奇妙的工具。没有什么比在协作式工作空间中装入有仿生夹具、且可以通过人工智能学习来解决各种各样抓握和转动任务的机器人更便捷的了。
强化学习:奖励原则
BionicSoftHand 使用强化学习法,即通过巩固强化进行学习。这意味着机械手将会习得一个目标,而不是一个必须模仿的具体行为。这需要它通过反复尝试(试错)实现。在所得反馈的基础上——无论积极还是消极的反馈——它不断优化行动,直到最终成功完成任务。

数字双胞胎:现实机械手及其在模拟模型中的虚拟图像
现实机械手的数字双胞胎
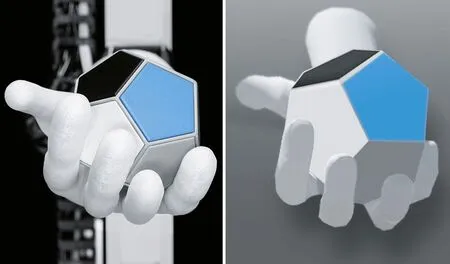
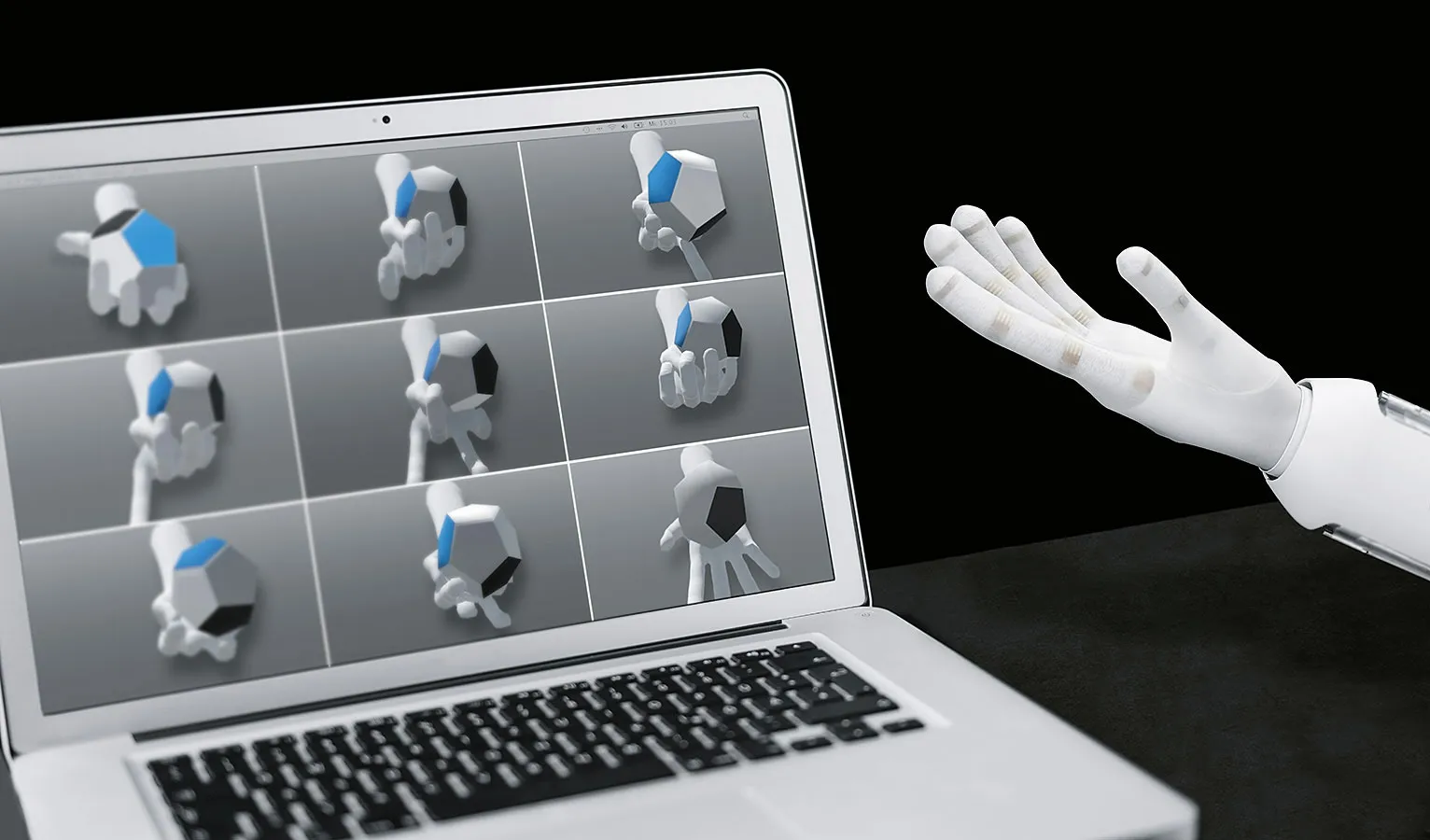
具体来说,BionicSoftHand 应该转动一个十二面骰子,最终使预先指定的一面向上。借助在虚拟环境中借助深度相机数据与人工智能算法创建的数字双胞胎,可以完成对必要行为策略的学习。
通过大规模并行学习快速传授知识
数字模拟模型,尤其是在将模型数量增倍时,可大大加快训练速度。在大规模并行学习中,所习得的知识将共享给所有虚拟机械手,然后在新的知识水平基础上继续工作——一个错误只犯一次。而成功的行动会立即被所有模型采纳。
模拟操控训练结束后,所习得的操控方法将被转移到现实的BionicSoftHand中。通过虚拟环境中习得的行为策略,机械手可将骰子转动至所需的一面,将来还可实现对其他物体的定向操作。通过这种方式将已习得的知识模块和新技能分享给其他机械手,实现全面信息覆盖。巧妙功能集成:狭小空间中集成了众多组件、技术与功能

气动运动学与3D 织物
与人类的手不同,BionicSoftHand没有骨骼。它通过手指上的气动波纹管结构控制动作。当气室充满空气时,手指弯曲;气室排空时,手指呈伸展状态。拇指和食指中还装有旋转模型,使这两个手指可横向移动。通过这一设计,仿生机械手总共可实现12 个自由度。
手指上的波纹管被一个特殊的3D 纺织涂层包围,该涂层由有弹性且高强度的线编织而成。纺织涂层用于确定该构造扩展的位置与发力点、以及扩展受阻的位置。
压电式比例阀实现精确调控
为了最大限度减低BionicSoftHand 软管设计的复杂度,开发人员在手的正下方设计了一个小型数字化调控的阀岛。如此可不必通过牵拉整个机械臂完成对手指的操控。因此,BionicSoftHand 的进气和排气各通过一根软管进行,可以快速、轻松连接并投入运行。使用的压电式比例阀可精确控制手指运动。


人机协作潜力
BionicSoftHand 中灵活的气动运动学设计以及对弹性材料和轻型部件的运用使其不同于电动或电缆驱动的机械手,也使其生产成本降低。由于采用模块化设计,也可以更换使用三指或四指的夹具。
与 气 动 轻 型 机 器 人( 如 BionicCobot 或BionicSoftArm)相结合,可实现直接且安全的人机协作。两台机器人均具有柔性,无需像传统工厂机器人那样与工人隔离。
因此,BionicSoftHand 专为应用于未来工厂的协作式工作空间而设计。由于灵活的机械手可有力且灵敏地抓握,因此可以作为各类组装工作的“第三只”辅助手臂或用作服务机器人。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
少儿科学周刊·儿童版(2021年20期)2021-12-11
发明与创新(2021年17期)2021-07-05
课程教育研究(2021年14期)2021-04-13
河北水利(2021年4期)2021-01-06
学生天地(2020年29期)2020-06-09
作文大王·中高年级(2018年7期)2018-08-18
知识经济·中国直销(2016年5期)2016-11-07
通信电源技术(2016年1期)2016-04-16
知识经济·中国直销(2016年3期)2016-02-27
