基于DSP的内置式永磁同步电机控制系统设计
2018-04-26 12:45:08王伟洋杨金波冀明路
微特电机 2018年4期
王伟洋,杨金波,张 锦,冀明路
(北京航天发射技术研究所,北京 100076)
0 引 言
内置式永磁同步电机(以下简称IPMSM) 是由绕线转子同步电动机发展而来[1]。它是用永磁体代替电励磁系统,省去了集电环、电刷和励磁绕组。与其他形式电机相比,IPMSM具有转矩密度大、转速范围宽、效率高、体积小等优点[2],在电动汽车等领域得到了广泛应用。
IPMSM矢量控制系统具有高动态性、高准确性和较宽的调速范围[3]。本文分析了IPMSM矢量控制原理,设计了基于数字信号处理器(DSP)的矢量控制系统,实现了转子位置检测、电流检测、IGBT驱动、转矩控制等功能。实验结果表明,该控制系统能够对电机转矩进行有效控制,满足电动汽车动力系统的要求。
1 IPMSM数学模型和矢量控制方法
1.1 IPMSM在d-q坐标系下的数学模型
IPMSM在d-q坐标系下的电压方程[3]:
(1)
磁链方程:
(2)
转矩方程:
(3)
运动方程:
(4)
式中:uq,ud为交、直轴电压;iq,id为交、直轴电流;ψq,ψd为交、直轴磁链;Rs为电机相电阻;Lq,Ld为交、直轴电感;ψf为永磁体磁链幅值;ωe为电角频率;B为阻尼系数;Tl为负载转矩;p为极对数。
稳态时d-q坐标系下主要矢量关系如图1所示。
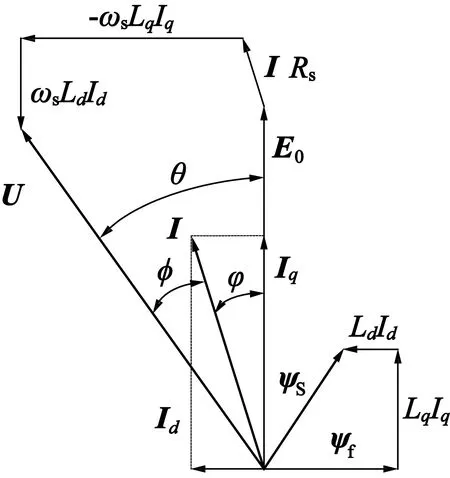
图1 IPMSM坐标系统
1.2 矢量控制方法
矢量控制又称磁场定向控制,是IPMSM的数学模型通过坐标变换到d-q坐标系下,实现了电机定子电流中励磁分量和转矩分量解耦。只需控制id,iq即可实现对电机输出转矩和转速的控制,使得IPMSM获得类似于直流电机的控制性能[4-5]。
IPMSM通常采用最大转矩电流比控制(以下简称MPTA),通过合理分配id,iq,充分利用磁阻转矩,在相同电流幅值下使得输出转矩最大,从而降低逆变器容量,提高系统效率。
当IPMSM稳定运行时,忽略定子电阻,id,iq须同时满足电压极限椭圆和电流极限圆的要求。如图2所示,当ωe=ωe1或ωe=ωe2时,电流矢量is分别被限制在各自对应的阴影区域内。
(5)
(6)

MTPA控制和弱磁控制的计算过程较为复杂,很难在控制器中进行实时计算。通常将相应转速和转矩对应的id,iq先计算出来,放入一个表格中,实际控制时采用查表和插值的方法来进行转矩控制。
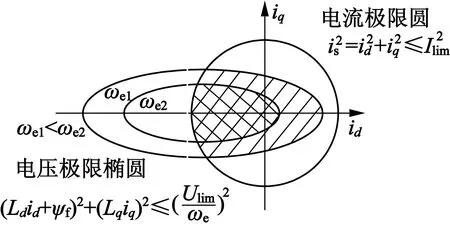
图2 电压极限椭圆与电流极限圆
基于以上分析,IPMSM矢量控制系统结构如图3所示。控制系统由id和iq发生器模块、电流PI调节模块、坐标变换模块、SVPWM算法模块、逆变器模块等组成。id和iq发生器模块根据转矩和转速给定经查表计算出对应的id和iq指令。id和iq给定与经坐标变换后得到的实际电流值进行比较,经电流PI调节器后得到所需的d,q轴电压。然后经Park逆变换和SVPWM模块产生6路PWM信号驱动逆变器工作,最终将电压施加到电机上[7]。

图3 IPMSM的矢量控制框图
2 硬件电路设计
硬件系统由主回路、驱动电路、DSP主控单元、电流检测电路,位置检测电路、掉电存储电路、通讯电路等部分组成。各部分电路互相配合,共同完成对电机的控制,总体结构如图4所示。
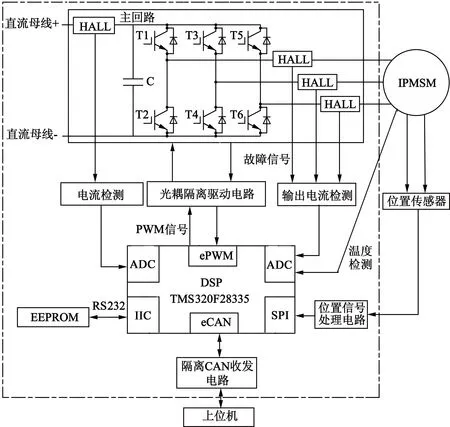
图4 系统硬件总体结构
2.1 主回路
主回路包含母线支撑电容、三相逆变电路。该硬件系统主要用于控制100 kW大功率电机,输出电流峰值在600A以上,为此选用2个600A/1200V的IGBT模块并联使用,以提高电流输出能力。在大功率应用场合,IGBT并联方案相比单IGBT方案具有散热效果好、布局灵活和性价比高的优点。IGBT在电流较大时饱和压降具有正温度系数,这个特性也有助于IGBT并联工作时实现均流。
2.2 DSP主控单元
DSP主控单元TMS320F28335是整个控制系统的核心,它主要负责信号采集、控制算法实现、参数管理、PWM信号生成以及与上位机通讯等工作。TMS320F28335不仅具有工作频率高、运算速度快、支持浮点运算等特点,还提供了大量的外设资源,如AD转换单元,ePWM单元、各种串行通讯单元(SPI,eCAN,IIC),eQEP正交编码器接口单元等。这些外设资源为电机控制提供了各类基本操作模块,通过简单配置寄存器即可实现相应的功能,有助于电机控制系统的快速开发。
2.3 驱动电路
驱动电路将DSP产生的PWM信号经隔离和放大后施加到IGBT上,控制IGBT通断,从而输出所需电压。驱动电路以门极驱动光耦ACPL-344JT为核心,通过匹配必要的外围器件来搭建。ACPL-344JT具有米勒电流箝位和软关断功能,提高了驱动电路的可靠性。除此之外,该芯片还能够检测IGBT饱和压降和驱动电压,当饱和压降过高或驱动电压过低时输出故障信号并关断输出,及时保护IGBT。门极驱动光耦的驱动能力一般较小,峰值电流不超过2.5 A,通常需要外加一级推挽电路以增加驱动能力。驱动电路结构如图5所示。

图5 IGBT驱动电路
因为采用IGBT并联方案,驱动电路应尽可能保持一致以提高均流效果,因此采用2个IGBT共用一套驱动电路的方案。将每一个IGBT的栅极电阻拆成两部分,分别连接到栅极和射极上,利用射极电阻的负反馈作用使并联的IGBT的开通过程趋于一致,可进一步改善动态均流。
2.4 电流检测电路
IPMSM矢量控制需要测量各相电流进行坐标变换。根据电机最大工作电流,选用LEM公司900A量程的车用电流霍尔传感器HAH1DRW 900-S,电流检测电路如图6所示。
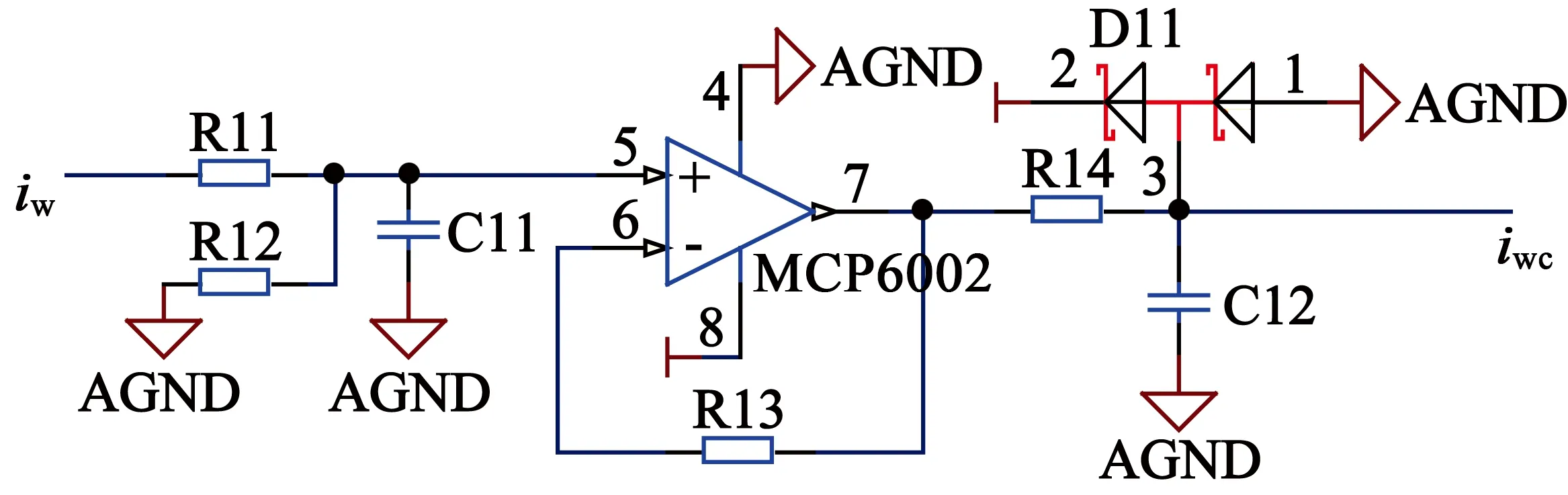
图6 电流检测电路
电流霍尔传感器采用5 V供电,将电流信号转换为电压信号输出。当电流为零时,传感器输出2.5 V电压;当电流在±900 A范围内变化时,电流传感器输出电压范围是0.5~4.5 V。电流检测电路接收电流传感器的信号并经过运算放大器进行分压,将其转化为0.3~2.7 V以内的信号,以满足DSP对输入模拟电压0~3 V的要求。图6中2个二极管起嵌位作用,防止电压超过A/D接口电压范围。
2.5 位置检测电路
车用驱动电机通常采用旋转变压器来检测转子位置。位置检测电路应能够产生旋转变压器所需要的激磁信号,并根据其反馈的正余弦信号进行解码,算出转子位置。位置检测电路如图7所示。AD2S1205是具有12位分辨率的专用旋转变压器轴角转换芯片,芯片上集成可编程正弦波振荡器,可为旋转变压器提供正弦波激励。轴角转换器可以将正弦和余弦输入端的信息转换为输入角度和速度所对应的数字量,并通过SPI串行接口将位置信息反馈给DSP。AD2S1205激磁信号驱动能力较弱,无法直接驱动旋转变压器,且对输入信号幅值范围有一定要求。因此,通过一个缓冲电路对激磁信号进行放大同时提高其驱动能力,以保证特定变比的旋转变压器的输出信号能够满足轴角转换芯片的要求。
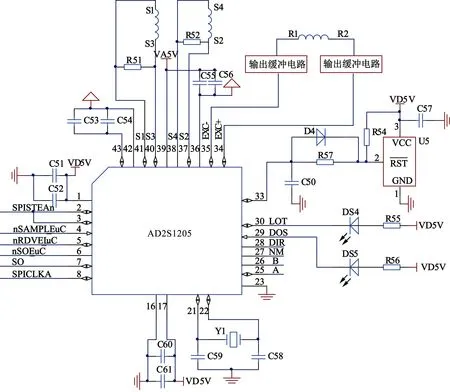
图7 位置检测电路
2.6 存储与通讯电路
DSP通过IIC总线与EEPROM相连,将电机控制所需的参数都保存在EEPROM中,保证参数值在下次上电后保持不变。
控制系统通过CAN通讯与上位机相连。CAN通讯电路由高速光耦和CAN收发器及必要的外围器件组成,通讯速率最高可达1 Mb/s。
3 软件设计
IPMSM控制系统的主要功能通过DSP软件编程实现,控制软件由主程序和中断服务子程序构成。主程序完成系统及PWM,AD,SPI,CAN等模块寄存器的初始化、变量及控制参数初始化、通讯等功能。主程序流程如图8所示。在完成各类初始化操作后,程序将进入一个无限循环,不断接收上位机的控制指令并将电机转速、电流、温度等重要信息发送给上位机。
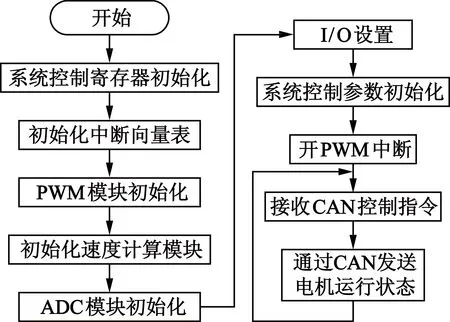
图8 主程序结构流程图
电机控制策略的实现过程在中断服务程序中完成。中断服务程序流程如图9所示。进入PWM周期中断后,首先对电机相电流和母线电流进行采样,并读取轴角转换器产生的位置信息,然后计算出电机当前速度并对电流进行坐标变换。根据各变量的值判断电机是否处于过流、超速等故障状态。如电机处于故障状态,则立即关断PWM输出;如电机运行正常,则根据转矩指令和当前转速计算出电流指令值,经电流环PI调节器、电压坐标变换和SVPWM调制后产生所需的PWM信号。

图9 中断服务子程序流程图
4 实验结果
实验中,被控电机通过扭矩仪与一台加载电机连接,被控电机工作于转矩模式,加载电机工作于转速模式。被控电机额定功率100kW,额定转速1 000 r/min,额定转矩955 N·m,额定电压576 V(DC),极对数6。通过加载系统将电机稳定在特定转速,控制器根据指令驱动被控电机输出指定转矩。图10为1 000 r/min,1 000 N·m工作点的三相电流波形,图11为此时的电压电流矢量图。从图10、图11可以看出,电流波形保持正弦,三相电压和三相电流矢量各维持120°的相位差,具有较好的对称性,电机平稳运行。

图10 三相电流波形
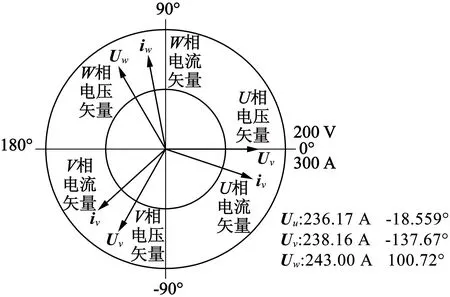
图11 三相电压、电流矢量图
表1列出了不同转速下电机所能输出的最大转矩。图12为电机控制系统的转速-最大转矩和转速-最大功率外特性曲线。随着转速的上升,电机输出最大转矩逐渐下降,但是在1 000 r/min以上,电机输出最大功率基本可以保持不变,维持在最大功率点附近,符合电机高速恒功率输出的特点。

表1 不同转速下的最大转矩与机械功率
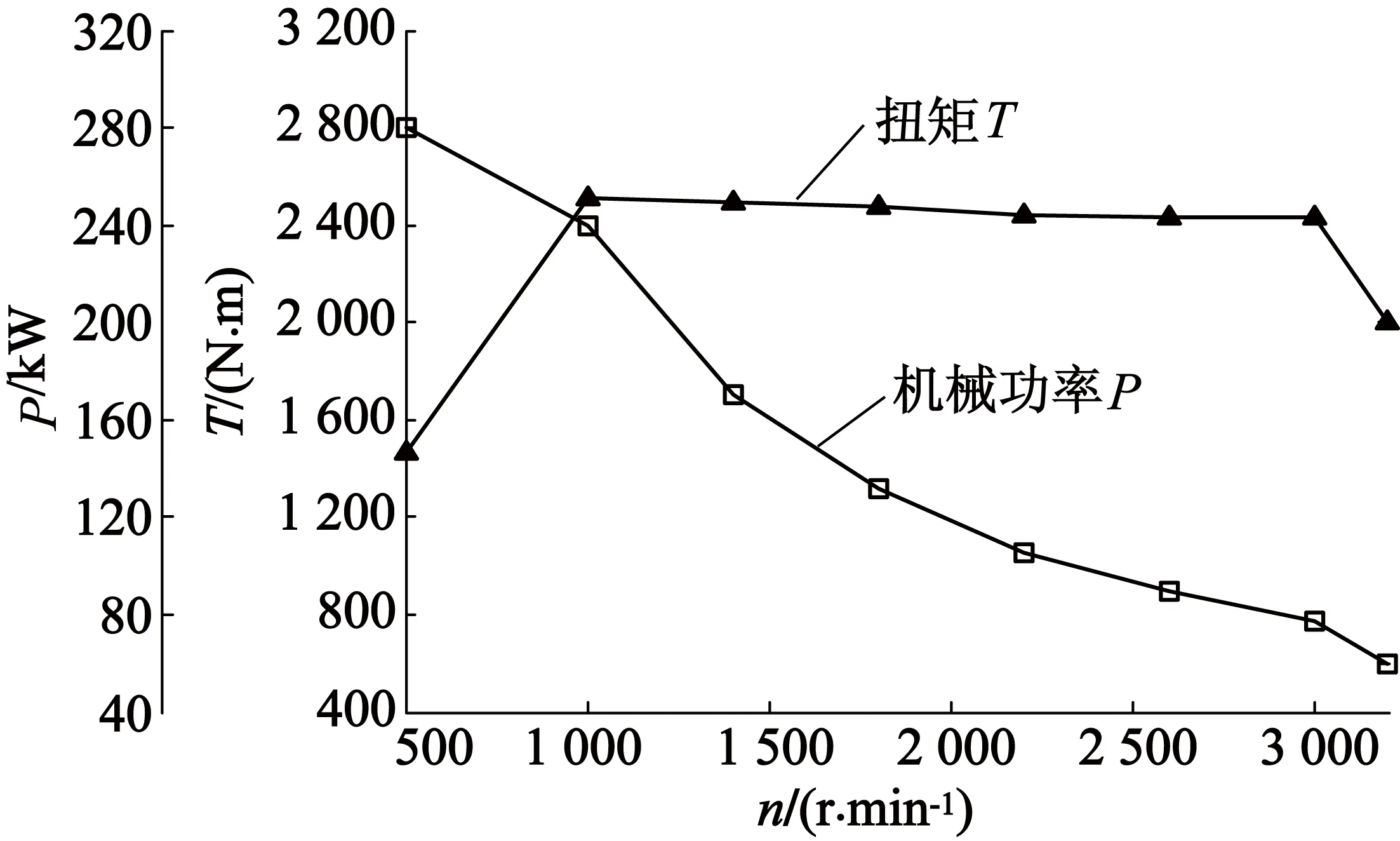
图12 额定电压下的电机外特性曲线
5 结 语
在分析IPMSM数学模型和矢量控制原理的基础上,结合车用驱动电机的使用要求,以TMS320F28335为主控芯片设计了IPMSM控制系统的软、硬件。该控制系统能够采集电流、位置等反馈信息,按上位机指令进行运算,输出所需电压,驱动电机运行。实验结果表明,本文设计的电机控制系统能够有效控制电机输出转矩,使电机在全转速范围内都能够维持一定的输出功率,满足车用驱动电机系统的应用需求。
[1] 暨绵浩,曾岳南,曾建安,等.永磁同步电动机及其调速系统综述和展望[J] .电气时代,2005,25(5):20-23.
[2] 钱昊,赵荣祥.永磁同步电机矢量控制系统[J].农机化研究, 2006(2): 90-91.
[3] 王秀和.永磁电机[M]. 2版.北京:中国电力出版社,2011:290-316.
[4] 王成元.现代电机控制技术[M] .北京:机械工业出版社,2009:106.
[5] 张鹏.永磁同步电动机弱磁调速控制方法的研究[D].天津:天津大学,2007.
[6] LAKSHMI N S,ADHAVAN B,JAGANNATHAN V,et al.Reduction of transient and steady state speed pulsation in permanent magnet synchronous motor using Space Vector Pulse Width Modulation control[C]//2013 International Conference on Circuits,Power and Computing Technologies (ICCPCT).IEEE,2013:252-257.
[7] YIFA S,WENZHEN Z, ZHENNAN H, et al. Field weakening operation control of permanent magnet synchronous motor for railway vehicles based on maximum electromagnetic torque at full speed[C]//2010 29th Chinese Control Conference (CCC).IEEE,2010:1608-1613.
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
房地产导刊(2020年11期)2020-12-28 01:32:30
铁道通信信号(2019年4期)2019-10-10 03:42:56
四川冶金(2018年1期)2018-09-25 02:39:26
现代防御技术(2016年1期)2016-06-01 12:13:28
通信电源技术(2016年1期)2016-04-16 04:57:31
通信电源技术(2016年1期)2016-04-16 04:57:26
新高考·高一物理(2016年1期)2016-03-05 22:47:39
电机与控制应用(2015年3期)2015-03-01 03:49:59