基于ADVISOR的城市用混联式混合动力汽车的建模与仿真
2018-04-24 11:41胡红生
新乡学院学报 2018年3期
吴 越 ,肖 平 ,胡红生 ,李 伟
随着石油资源的日益枯竭和汽车保有量的不断增多,人们对电动汽车的依赖越来越多。另外,城市里的出租车越来越多,对城市低空造成的污染越来越重,这也需要新型电动出租车取代传统的燃油出租车。目前,人们正在研究各种类型的电动汽车,以取代传统的燃油汽车。电动汽车可分为纯电动汽车、混合动力电动汽车、燃料电池汽车。纯电动汽车电池的比功率低、比能量小、充电速度慢,其行驶距离受到了极大的限制,因此不适合作为城市出租车使用;燃料电池汽车中的氢气存储问题尚未得到较好的解决,也不适合作为城市出租车使用[1]。混合动力电动汽车具有发动机、电动机两套动力系统,在电力不足的工况下,可以使用发动机驱动汽车行驶,在电力充足的情况下可以使用电动机驱动汽车行驶,其特点是行驶距离不受限制,且排放少、油耗低。因此,混合动力电动汽车非常适合作为城市出租车使用。在本文中,我们分析和研究了混联式混合动力电动汽车的系统机构和工作原理,建立了系统各部分的数学模型,在ADVISOR中建立了该车的仿真模型,并对两种工况下的仿真结果进行了分析,结果表明混联式混合动力汽车在这两种工况下表现出良好的性能,能满足环保和使用者的要求。
1 系统结构与工作原理
在本文中,我们研究的是混联式混合动力汽车,其系统结构如图1所示。从图1可以看出,发动机产生的机械能可通过动力传递装置直接驱动车轮前进,电池组-电动机组也可通过动力传递装置直接驱动车轮前进。另外,发动机输出的机械能在驱动汽车行驶的同时还为电池组充电。
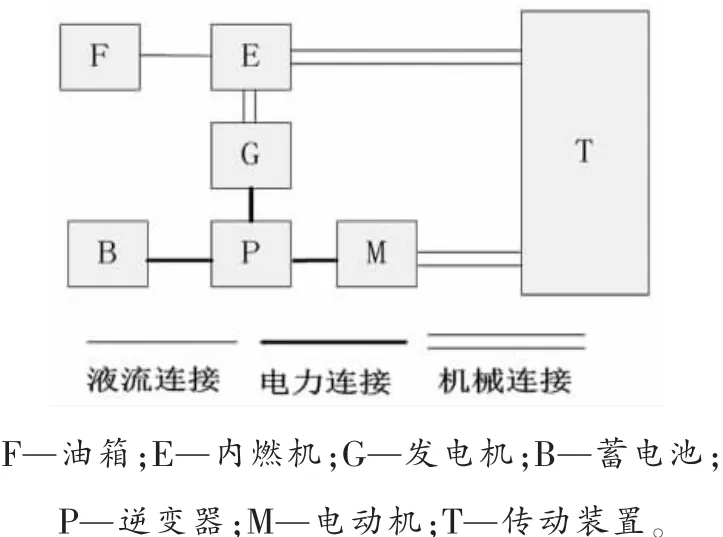
图1 混合动力汽车的系统结构
2 建立系统模型
在本文中,我们将研究4门5座3厢混联式混合动力汽车。该汽车由两台机器驱动:一台是汽油发动机,功率为118 kW;另一台是电动机,最大功率为105 kW。另外,该汽车还装有交流同步发电机和镍氢蓄电池组,发电机的最大功率为105 kW,电池组由34个模块(每个模块由6节1.2 V电池组成,单体电池容量为6.5 Ah)组成。下面利用系统的数学原理、工作原理以及ADVISOR软件建立混合动力汽车系统中各部分的数学模型。
2.1 建立发动机模型
根据发动机制造商提供的数据,我们做了发动机的台架性能实验,得到了拟合函数,再结合发动机的动力学方程[2],得到发动机的转矩表达式=− 1 81.3 + 3 79.36+ 21.91(A F)2+ 0.26σ−0.002 8σ2+0.027 wE− 0 .000107 wE2+0.004 8wEσ+2.55σ−0.5σ2M, 其中, M为发动机的进气质 aa量,A/F为空燃比,σ 为点火提前角,wE为发动机的扭矩。另外,发动机的实际输出转矩随节气门开度的变化而变化,当节气门开度最大时,发动机输出的转矩最大,发动机输出的实际转矩 Te=u( TE)max,其中u为节气门开度大小。
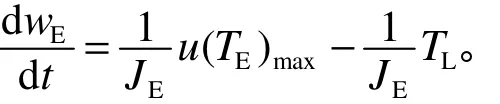
发动机的加速状态方程为

其中,JE为发动机的转动惯量,TL为负载转矩。将代入加速状态方程,可得
2.2 建立电动机模型
在本文中,我们研究的混联式混合动力汽车的驱动电机为三相交流异步电机,其运行遵循能量守恒定律、安培环路定律、磁路的欧姆定律、法拉第电磁感应定律、全电流定律[3]等,由此可以得出如下电机模型:
电机中每相转子的电压 ub= Rbib+(− e2),其中,Rb为转子的电阻,ib为转子的电流,e2为转子漏磁电动势。
电机的转矩 T = KTφ iecosϕ2,其中,KT为电机常数,φ 为每个极的磁通量,ie为电机的额定电流,cosϕ2为电机的功率因数。
电机的运动学方程 T = J d w dt + T0,其中,J为转动惯量,T0为负载的转矩。
2.3 建立发电机模型
混联式混合动力电动汽车上安装的是交流同步发电机,它遵循的各项原理与电机的一致,因此可以建立如下发电机模型 J d ω1dt= T1−T2−cω1,其中,J为发电机旋转系统的转动惯量,T1为发电机的电磁转矩,T2为发电机转矩,c为发电机旋转系统的阻尼系数, ω1为角速度。
2.4 建立电池模型
混联式混合动力汽车使用的镍氢电池的电化学性质是不稳定的,因此需要借助电池的开路电压和内阻等参数检测电池组的Bsoc(Bsoc为电池组的荷电状态)。在不考虑外界影响因素的条件[4]下,可建立如下电池的数学模型:
电池组端电压 Ua= Ea−IaRa,其中Ua为端电压,Ea为开路的电压,Ia为电流,Ra为电池组的内阻。
电池组的功率 Pa= EaIa−Ia2Ra,其中Ea为开路的电压,Ia为电流,Ra为电池组的内阻。
其中,G0为初始的温度,Qw为因功率损耗发出的热量,Qa为电池组散发到空气中的热量,m1为电池组的质量,c1为电池组的比热容。
电池组的开路电压Ea是Bsoc和Gm的函数,电池组的内阻 Ra是 Bsoc、Gm和 Ni(电流的方向)的函数,即

因为镍氢电池充放电时会产生大量的热量,这会使电池的温度升高,其电化学特性与许多因素有关,所以其内阻与开路电压的方程[式(2)和式(3)]是不相同的。
2.5 建立车身模型
当汽车在道路上行驶的时候,所克服的阻力为坡度阻力、空气阻力、滚动阻力、加速阻力[5]。 因此,汽车的行驶方程为其中,Ft为汽车驱动力,Fa为滚动阻力,Fb为空气阻力,Fc为坡度阻力,Fd为加速阻力,G为汽车所受的重力,f为滚动阻力系数,CD为空气的阻力系数,A为迎风面积(m2),ua为汽车的行驶速度,Ψ 为道路阻力系数,m为汽车的总质量(kg);δ为旋转质量换算系数, d uadt 是为汽车的行驶加速度。
2.6 建立控制器模型
混联式混合动力汽车有3种工作模式,即纯电动模式、边充电边放电模式和驻车充电模式。设发动机-发电机组的输出功率为pu,行驶所需要的功率(以下简称需求功率)为pxy,电池组荷电状态的工作区间的上、下限分别为 m ax(Bsoc)、m in(Bsoc),则混合动力汽车的控制逻辑可表示为如下形式:1)当 Bsoc值大于某一设定值 ( Bsoc)0,且 m ax(Bsoc) ≥( Bsoc)0≥ m in(Bsoc)时,若需求功率 pxy较小,发动机-发电机组关闭,其输出功率pu为0,只有电池组为整车提供动力。2)当 Bsoc值大于(Bsoc)0,且需求功率pxy也较高时,电池组提供大部分动力,发动机-发电机组提供少部分动力。3)当 Bsoc的值接近 ( Bsoc)0,且当需求功率pxy大于发动机-发电机组所提供的功率时,电池组才提供动力。4)当 Bsoc值小于 ( Bsoc)0时,发动机-发电机组为电池组充电,直至Bsoc值高于 ( Bsoc)0,只有当需求功率pxy高于发动机-发电机组提供的功率,电池组才会向整车提供动力[6]。
3 仿真模型与结果分析
3.1 仿真模型
借助以上发动机、驱动电动机、发电机、电池、车身以及控制器的数学模型,并借助ADVISOR仿真软件,我们利用MATLAB/SIMULINK软件建立了混联式混合动力汽车的仿真模型(图2)。其中,电动机与发动机的状态由控制器根据控制逻辑以及电池组的 Bsoc确定。另外,仿真系统的需求功率pxy是通过控制器根据其驱动循环的速度计算得到的。
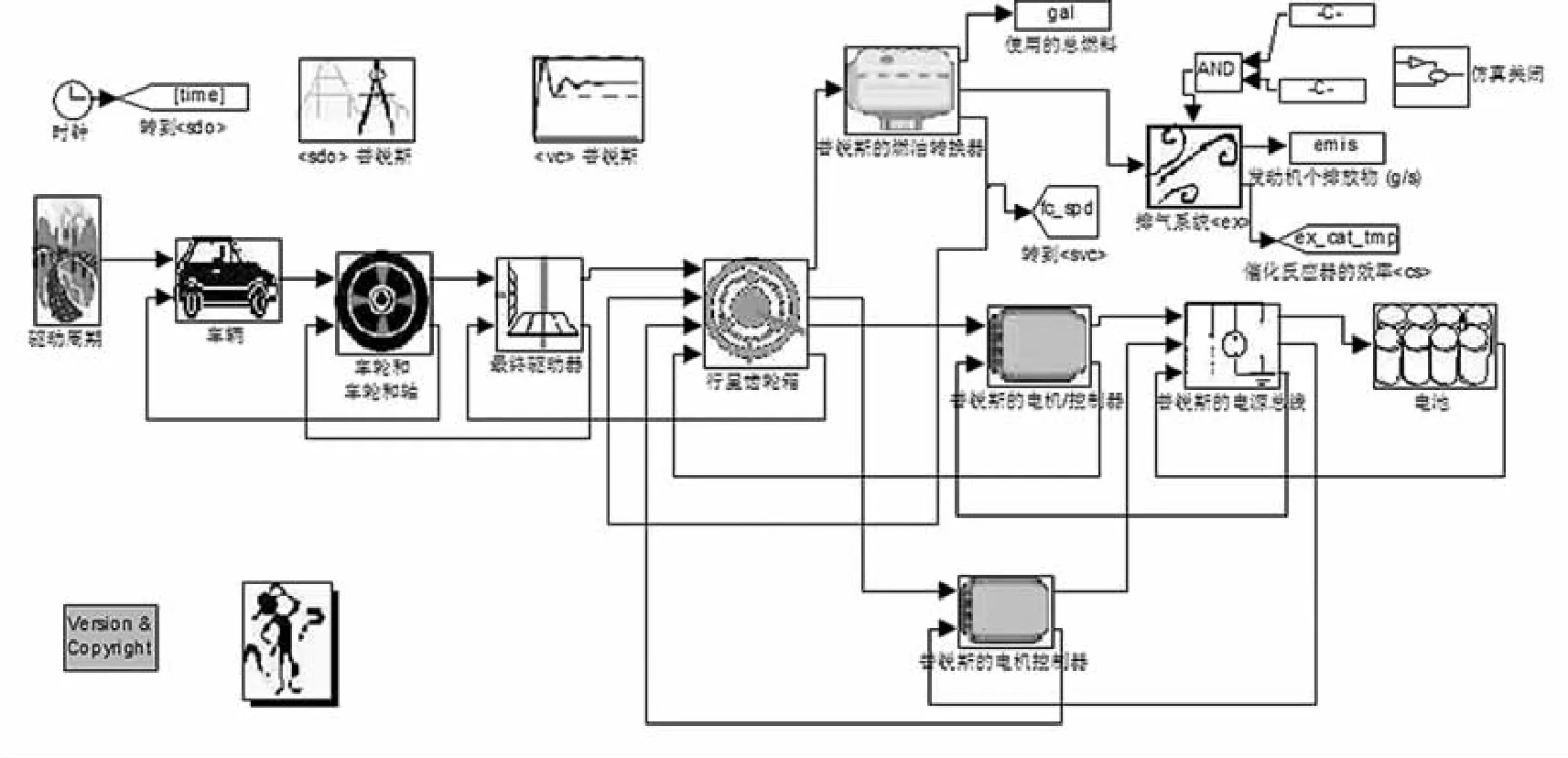
图2 混合动力汽车仿真模型
3.2 仿真试验与结果分析
混合动力汽车选择的循环路况不同,其车速、荷电状态、发动机的排放物也不相同。另外,混合动力汽车的仿真实验必须以合理的行驶路况作为实验条件。因此,选取良好的循环路况对混合动力汽车的仿真是有意义的。在仿真过程中,我们选取了两种典型的循环路况,即欧盟城市路况和新欧洲行驶循环工况,并设置了运用ADVISOR软件仿真的某混联式混合动力汽车的参数界面(图3)。
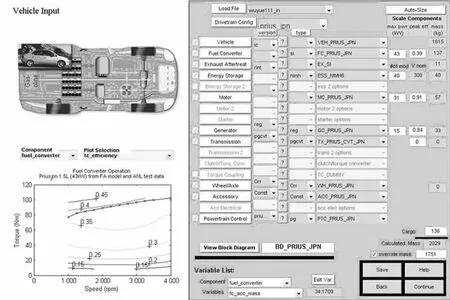
图3 某混联式混合动力汽车仿真模型的参数设置界面
3.2.1 欧盟城市路况仿真
在欧盟城市路况循环标准仿真条件下,设置仿真参数如下:每次循环时间为380 s,仿真步长为1,循环次数为10。仿真结果如图4~图10所示。图4表示的是欧盟城市路况下速度与时间的关系,汽车行驶350 s时速度达到120 km/h。图5表示此路况下的车速跟随结果,10个循环的结果与图4一样。由图4和图5可知车速跟随时间情况良好。纯电动行驶是通过关闭发动机来实现的,图6表示的是纯电动模式下电池组的Bsoc随时间的变化情况,图7给出了纯电动模式下路程与时间的关系。从图7可以看出,在2 400 s时电池组能量耗尽,行驶路程40 km左右,由此可知在公园、学校和一些地方不大的场所,纯电动模式是完全满足要求的最环保行车模式。图8表示的是各种排放物的仿真结果,从图8可以看出,发动机的各种排放量都很低,与国Ⅳ标准对比的结果见表1。图9是电池组的 Bsoc的仿真结果,从图9可以看出,电池组的 Bsoc仿真结果包含了10个循环,在欧盟城市路况下电池组的 Bsoc能维持的最佳工作区间为 0.55~0.65(在 0.4~0.8内),寿命与性能也能得到保障。从图9还可以看出,电池组的 Bsoc能恢复到0.65左右,这说明该汽车的发动机-发电机组所提供的电能可以满足混联式混合动力汽车在此循环工况下工作。混联式混合动力汽车在行驶中:当电池组的Bsoc接近0.56时,发动机就会启动,并给电池组充电;当电池组的 Bsoc达到0.65时,发动机关闭,停止向电池组充电。这种行驶模式避免了镍氢电池因过度充放电造成的损害。图10是汽车行驶路程的仿真结果,从图10可以看出,只要油箱里有油,汽车的续航距离能达到无限大,这说明仿真结果是符合实际情况的。
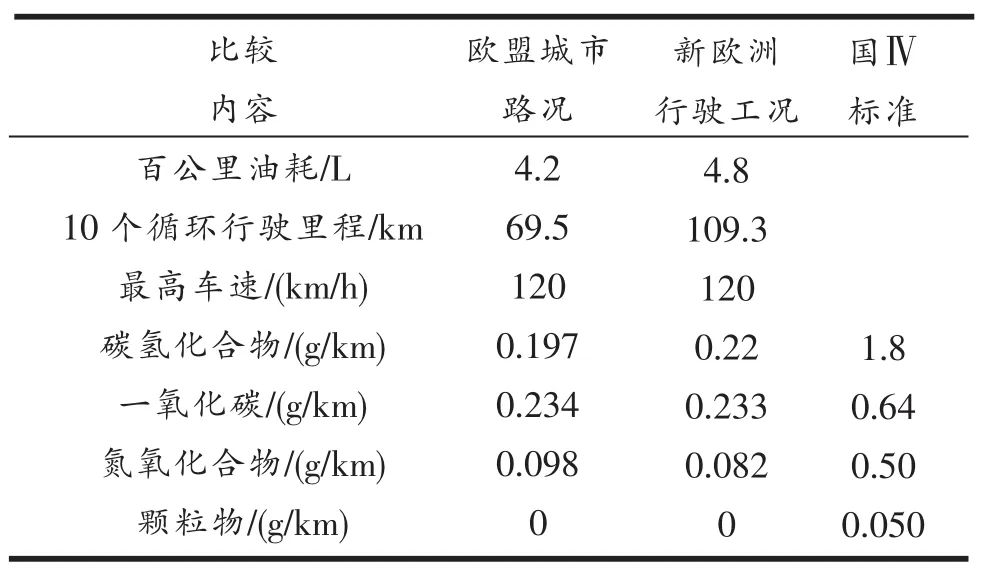
表1 两种工况及国Ⅳ标准
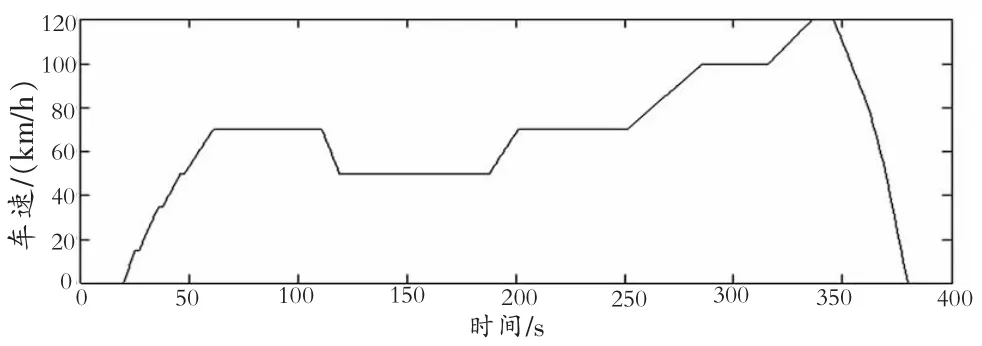
图4 欧盟城市路况下速度的变化情况
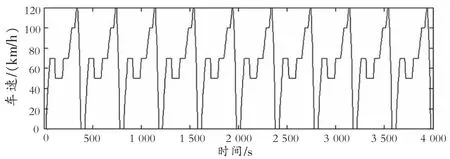
图5 欧盟城市路况下车速的跟随结果
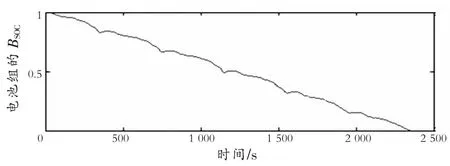
图6 欧盟城市路况下纯电动模式电池组的B SOC的变化情况
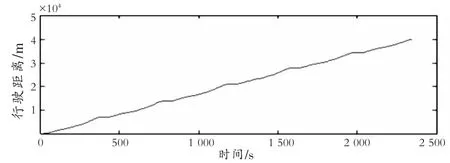
图7 欧盟城市路况纯电动模式下行驶距离与时间的关系
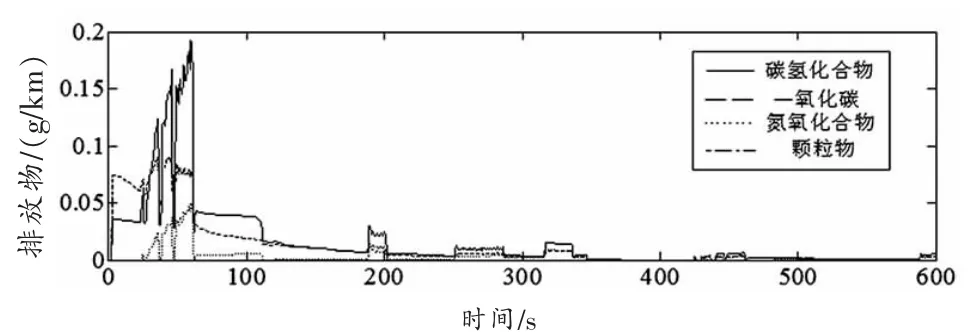
图8 欧盟城市路况下发动机各排放物的仿真结果
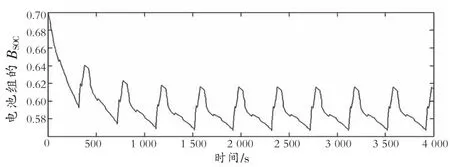
图9 欧盟城市路况下电池组的B SOC的变化情况
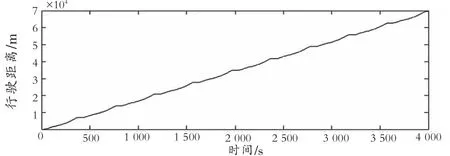
图10 欧盟城市路况下行驶距离仿真结果
3.2.2 新欧洲行驶工况仿真
在新欧洲行驶工况仿真条件下,设置仿真参数如下:每次循环时间为1 200 s,仿真步长为1,循环次数为10。仿真结果如图11~图17所示。图11表示的是新欧洲行驶工况下速度与时间的关系,在1 150 s左右速度达到120 km/h。图12表示在此工况下的车速跟随结果,10个循环的结果与图11一样。由图11和图12可知,车速跟随时间情况良好。图13是纯电动模式下电池组Bsoc随时间的变化情况,图14给出了纯电动模式下路程与时间的关系,从图14可以看出,在纯电动模式下,汽车行驶5 500s左右电池组能量耗尽,行驶距离约为48 km,在欧洲公园和学校等禁止排放尾气的场合是完全满足要求的。图15表示的是发动机各排放物的仿真结果,从图15可以看出,在新欧洲行驶工况下的排放量依然很低,与国Ⅳ标准的对比结果见表1。图16描述的是电池组的Bsoc的仿真结果,从图16可以看出,电池组的Bsoc的仿真结果包含了10个循环,在新欧洲行驶工况下电池组的Bsoc能够维持的最佳工作区间为 0.50~0.68(在 0.4~0.8内),电池组的寿命与性能能得到保障,从图16还看出,电池组的Bsoc可以恢复到0.6,这说明了该汽车的发动机-发电机组提供的电能可以满足混联式混合动力汽车在此工况下工作。混联式混合动力汽车在行驶中:当电池组的Bsoc接近0.50时,发动机就会启动,给电池组充电;当电池组的Bsoc接近0.6时,发动机就会关闭,停止向电池组充电。这种行驶模式很好地避免了镍氢电池因过度充放电造成的损害。图17是行驶距离的仿真结果,从图17得出,只要油箱里有油,汽车的行驶距离能达到无限大,这说明仿真结果是符合实际情况的。
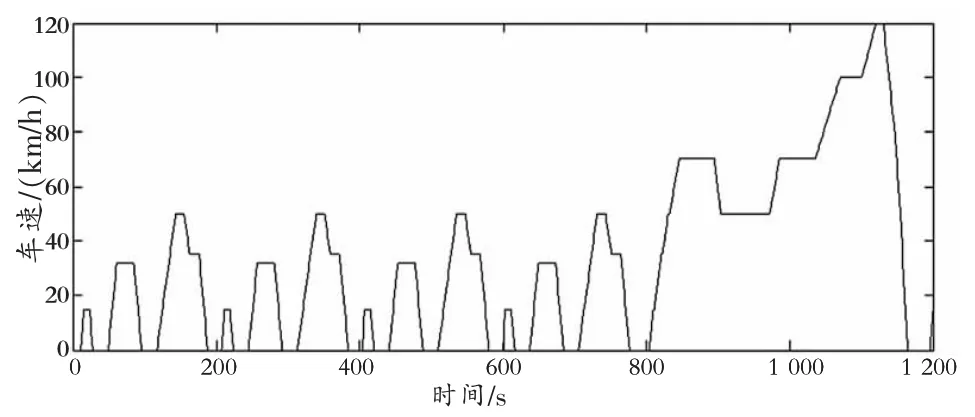
图11 新欧洲行驶工况下速度与时间的关系
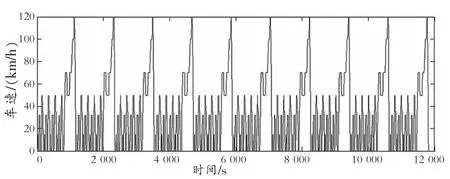
图12 新欧洲行驶工况下车速跟随结果
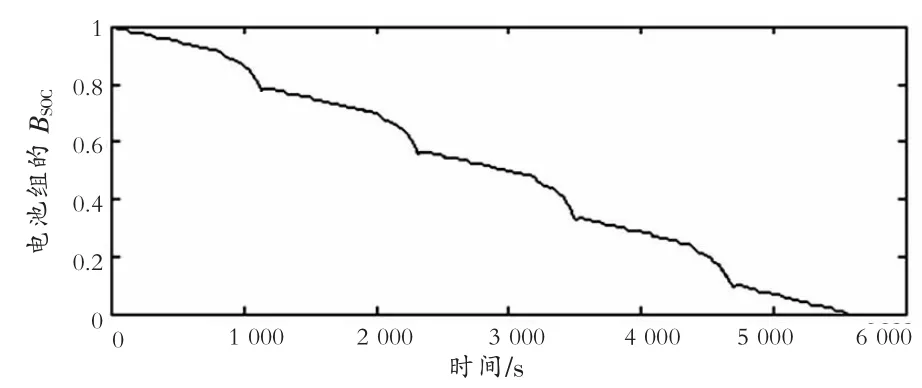
图13 新欧洲行驶工况纯电动模式下电池组的B SOC的变化情况
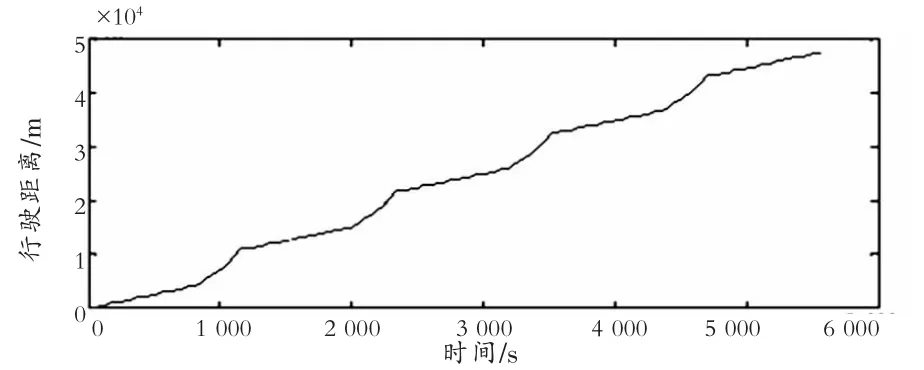
图14 新欧洲行驶工况纯电动模式下路程与时间的关系
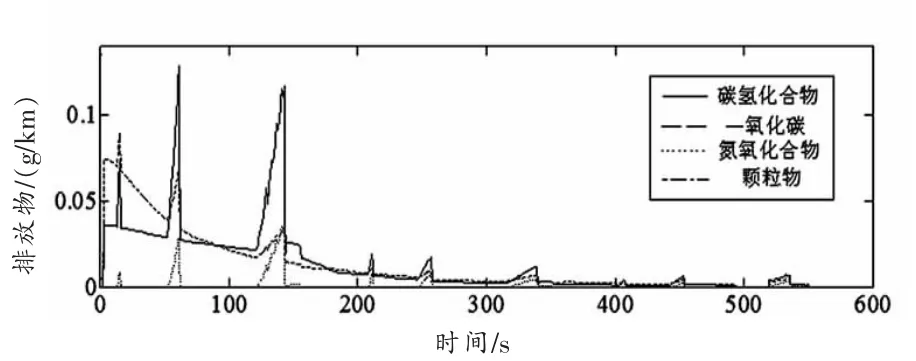
图15 新欧洲行驶工况下各排放物的仿真结果
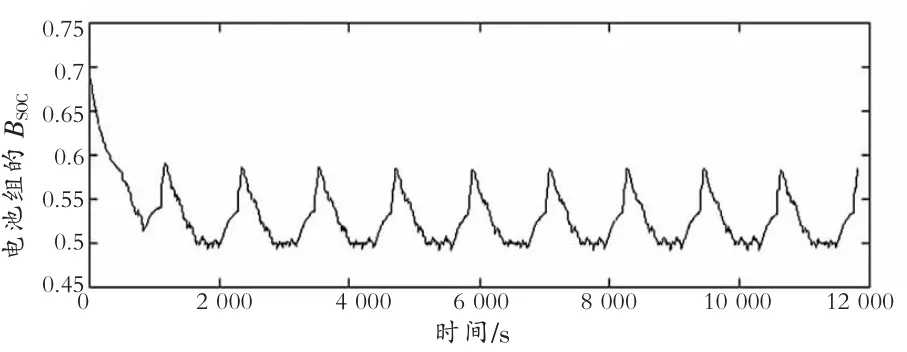
图16 新欧洲行驶工况下电池组的B SOC的变化情况
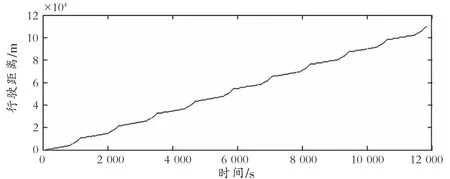
图17 新欧洲行驶工况下行驶距离仿真结果
4 结论
我们研究了混联式混合动力汽车的系统结构和工作原理,建立了汽车系统中发动机、电动机、发电机、电池、车身和控制器的数学模型,并借助ADVISOR仿真软件建立了混联式混合动力汽车的仿真模型。通过欧盟城市路况和新欧洲行驶循环工况对混联式混合动力汽车进行了仿真分析,结果表明混合动力汽车在这两种工况下表现出良好的性能,满足了环保和使用者的要求。所得结论对混联式混合动力出租车的研究提供了有益的参考。
参考文献:
[1] 杨洪振.混合动力汽车原理与发展趋势研究[J].山东工业技术,2017(7):245-246.
[2] 陈清泉,孙逢春,祝嘉光.现代电动汽车技术[M].北京:北京理工大学出版社,2002:78-90.
[3] ZHANG X,CHRIS M.Vehicle power management:modeling,control and optimization[M].Berlin:Springer,2011:101-115.
[4] RAHMAN Z,EHSANI M,BUTLER K L.An investigation of electric motor drive characteristics for EV and HEV propulsion systems[J].SAE transactions,2000,109(6):2396-2403.
[5] 包建超,陈丁跃,乔晓亮.基于ADVISOR仿真的纯电动汽车动力系统匹配研究[J].汽车实用技术.2013(8):5-7.
[6] 余志生.汽车理论[M].3版.北京:机械工业出版社,2001:78-84.
[7] 钱立军,袭著永,金德全.混合动力电动汽车控制策略的设计与仿真[J].系统仿真学报,2005,17(3): 722-725.
猜你喜欢
汽车维修与保养(2021年8期)2021-02-16
动漫星空(兴趣百科)(2019年3期)2019-03-07
传媒评论(2018年11期)2018-02-16
消费导刊(2017年19期)2017-12-13
中国交通信息化(2017年5期)2017-06-06
电子制作(2017年7期)2017-06-05
海外星云(2016年17期)2016-12-01
中国交通信息化(2015年3期)2015-06-05
中国交通信息化(2014年7期)2014-06-05
自动化博览(2014年10期)2014-02-28