基于ADAMS八连杆冲压机构的参数化设计与优化
2018-04-23 07:08伊启平黄秀琴
常州工学院学报 2018年1期
伊启平,黄秀琴
(常州工学院机械与车辆工程学院,江苏 常州 213032)
0 引言
在冲压生产中,冲压工艺对压力机工作性能往往有着特殊的要求。首先,在拉延作业过程中压力机滑块的速度不能太高,否则会引起拉延件的断裂。其次,在压力机滑块的工作行程中,滑块(冲头)的速度应基本保持均匀。最后,为了提高压力机的效率,冲压机构应具有良好的急回运动特性[1]。能满足以上要求且在生产中应用较多的是多连杆机构,其中以八连杆机构最为典型。本文主要根据八连杆冲压机构的工作原理和工艺要求,在ADAMS平台对机构进行参数化建模仿真,并以冲头最大加速度取得最小值为目标进行优化设计,得到较为理想的结构参数,这有利于冲头在冲压过程中减少振动和冲击,延长机器的使用寿命,为八连杆冲压机构的设计提供理论基础。
八连杆冲压机构的运动简图如图1所示,该机构由曲柄O1A、摇杆BCD和连杆AB、DE、AEF及冲头(滑块)组成。在冲压过程中,曲柄O1A为原动件,滑块为末端执行构件,实现了由转动变为直线运动的动作要求,并具有急回特性。机构的各部分结构尺寸对机构运动性能的影响较大,因此对机构进行尺度综合和优化设计在机构学研究中显得尤为重要。
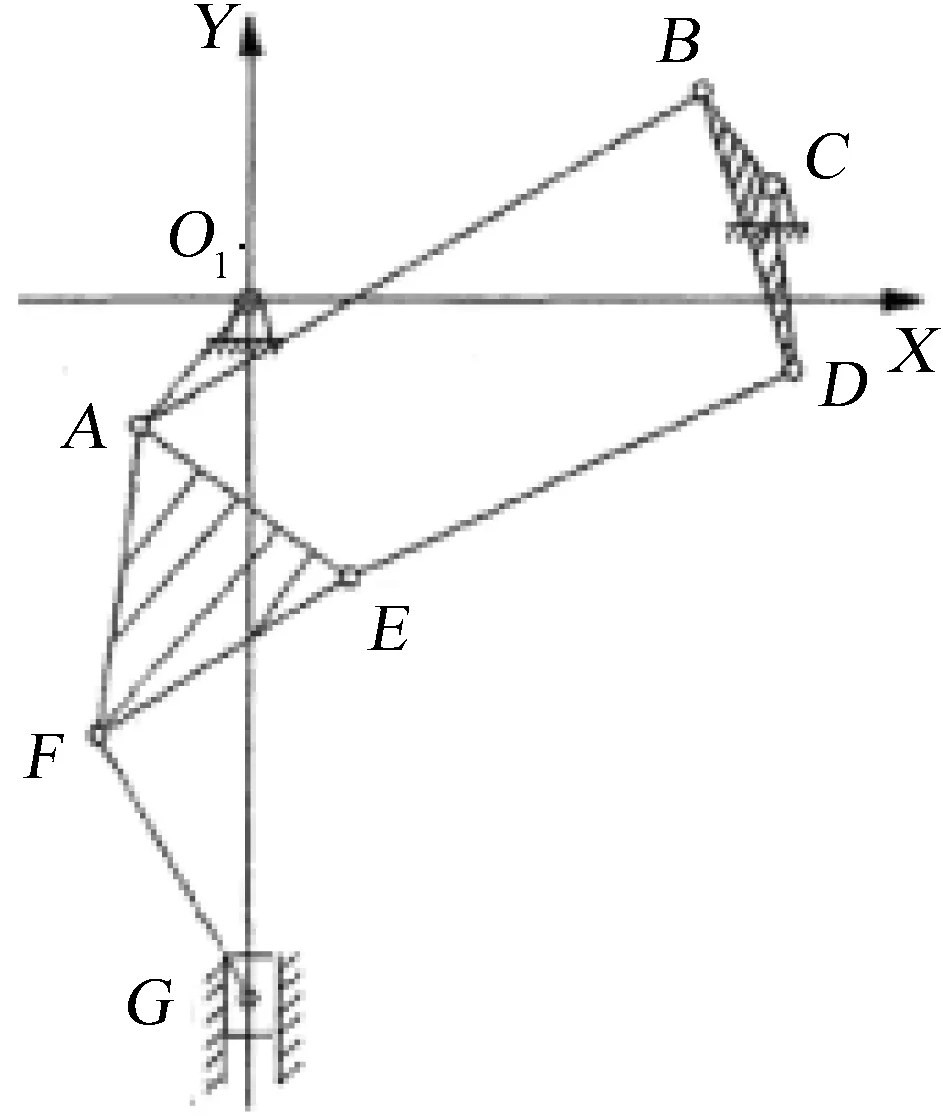
图1 八连杆冲压机构运动筒图
1 参数化建模及初步仿真
1.1 参数化建模
在建立八连杆冲压机构的虚拟样机参数化模型时,只需考虑与运动有关的因素,将运动尺寸表达出来,而撇开与运动无关的因素,以达到减化模型、缩短建模时间、方便仿真的效果。
首先在ADAMS平台上创建8个点,然后选择几何点创建构件,使构件与几何点相关联。如表1所示,创建点O1、A、B、C、D、E、F、G的初始坐标位置。
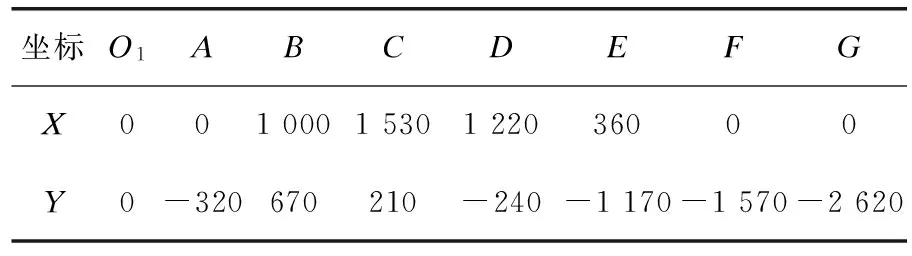
表1 各点的坐标值 mm
创建构件后,在各构件之间添加约束,曲柄O1A与大地之间在O1点添加转动副,曲柄O1A与三角板AEF之间在A点添加转动副,三角板AEF与连杆AB之间在A点添加转动副,连杆AB与三角板BCD之间在B点添加转动副,三角CD板与大地之间在C点添加转动副,三角板BCD与连杆DE之间在D点添加转动副,连杆DE与三角板AEF之间在E点添加转动副,三角板AEF与连杆FG之间在F点添加转动副,连杆FG与滑块之间在G点添加转动副,滑块与大地之间在G点添加Y方向的移动副。创建出如图2所示的八连杆机构参数化模型。
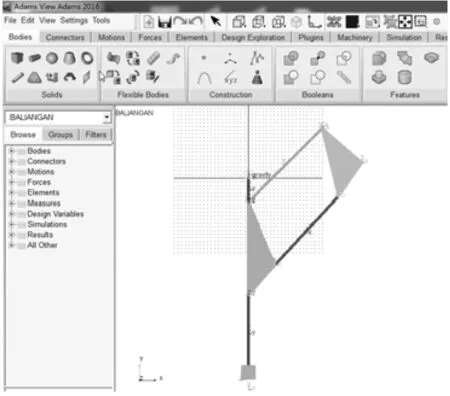
图2 八连杆机构参数化模型
1.2 初步仿真
在曲柄O1A上添加驱动并设置驱动参数,设驱动为30 (°)/s,仿真时间为12 s,步数为300步,进行一次运动学分析。通过仿真观察模型运动情况,对滑块进行测量,得出冲头的运动特性曲线,如图3所示。
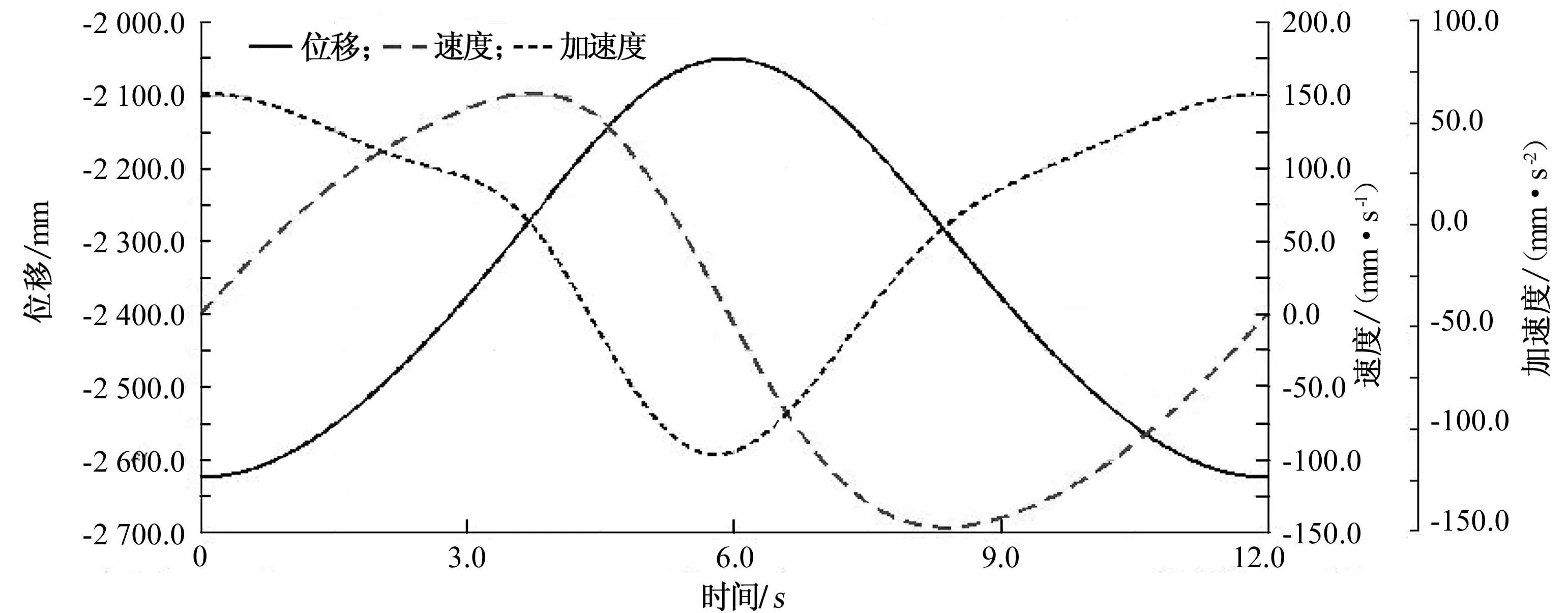
图3 八连杆机构冲头的运动特性曲线
2 参数化设计与优化
八连杆机构各杆件的尺寸与位置决定了压力机的性能,优化杆件的尺寸能够提高机构的运动特性。
2.1 模型的参数化分析
参数化分析的目的是为了能够清晰地观察各设计变量对样机性能的影响。在参数化分析过程中,基于参数化建模的几何点,在合理范围内采用不同参数值对模型进行一系列仿真。然后,对不同参数值下目标函数的仿真结果进行参数化分析,得出一个或多个参数变化对样机性能的影响。再进一步优化影响样机性能的参数,达到优化原型的目的。ADAMS/View参数化分析方法包括三种类型:设计研究(design study)、试验设计(design of experiment,即DOE)和优化分析(optimization)。
1)创建设计变量
除定点O1不变之外,通过改变其他各点的坐标来改变各杆件的尺寸与相对位置。因此我们将各点的坐标设置为变量。如图4所示。
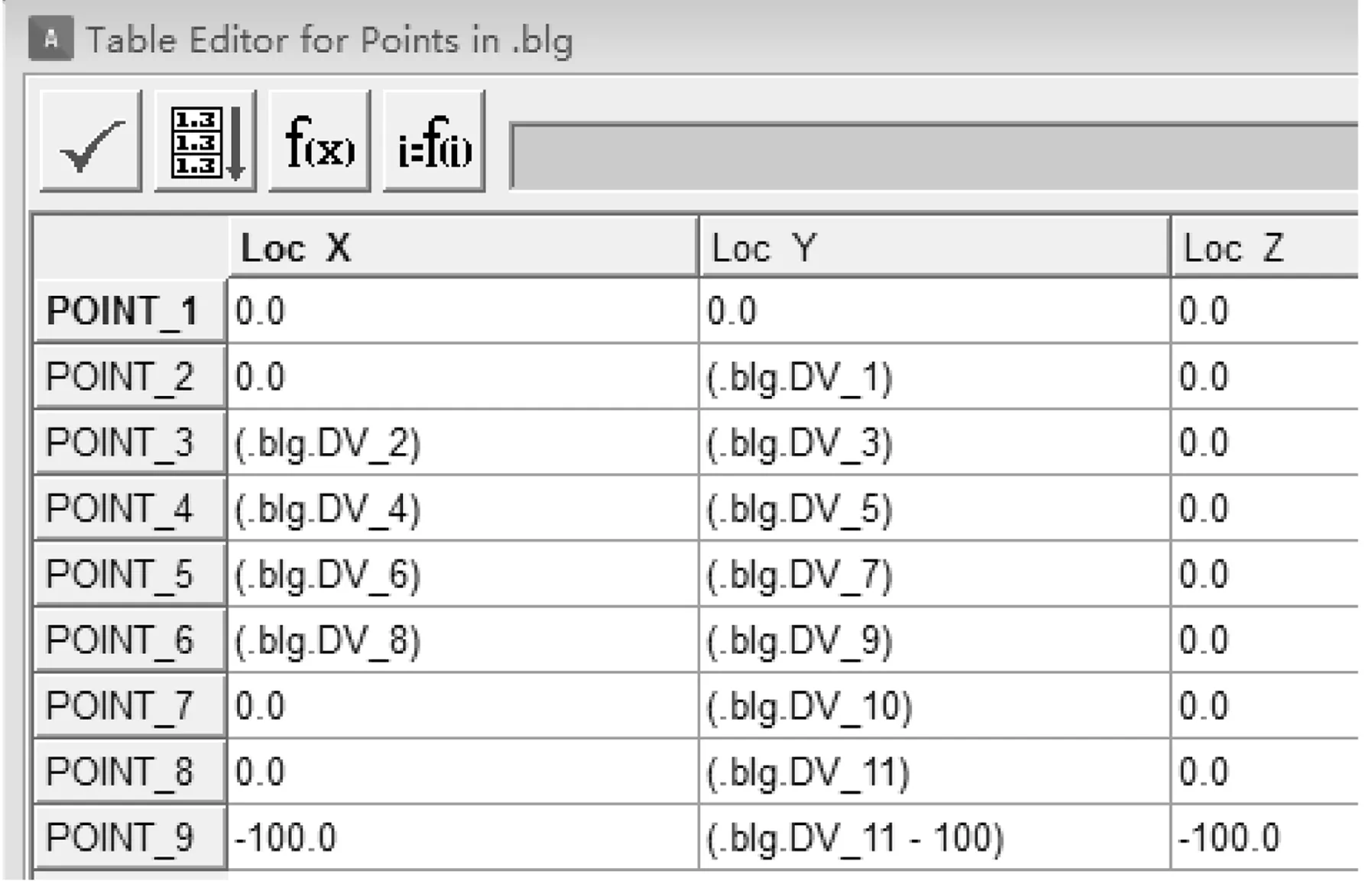
图4 参数化几何点及变量设置
2)设计研究
在建立参数化模型后,应该取不同的参数值,比如使设计参数的值在一定的范围内缓慢递增或递减,观察仿真过程中参数变化对样机性能的影
响。根据设计参数值的不同,进行一系列仿真分析。
在此对11个设计参数分别进行设计研究,以获得冲头加速度相对于设计参数的变化规律。设参数变化在初始尺寸的±100 mm范围内。当参数改变时,八连杆机构构件的运动尺寸也会发生改变,随之冲压机构的运动特性也会发生相应的变化。对11个设计参数进行仿真研究,在参数变化的范围内多次迭代计算,可以得到目标函数相对于各参数值的变化规律,其中参数DV_1对滑块加速度影响最大。
2.2 模型的优化分析
优化设计的重要前提是建立约束方程式,在满足约束条件下对目标函数寻求最优,这样才能排除不满足条件的设计方案。
对八连杆机构来说,要使得机构获得最优的参数值,还应当满足下列条件。
1)模型必须保证机构中存在曲柄,则
2)为了保证机构的传递效率,最大压力角不得超过40°,即αmax≤40°。
根据上述约束,创建测量函数。测量函数就是将上述约束条件定义为用设计变量表达的函数,如下所示:
DV_1-SQRT((DV_2-DV_4)**2+(DV_3-DV_5)**2)≤0;
DV_1-SQRT((DV_2)**2+(DV_1-DV_3)**2)≤0;
DV_1-SQRT((DV_8)**2+(DV_9-DV_1)**2)≤0;
DV_1-SQRT((DV_6-DV_8)**2+(DV_7-DV_9)**2)≤0;
DV_1-SQRT((DV_1-DV_10)**2)≤0;
DV_1+SQRT((DV_4)**2+(DV_5)**2)-SQRT((DV_2-DV_4)**2+(DV_3-DV_5)**2)-
SQRT((DV_2)**2+(DV_1-DV_3)**2)≤0;
DV_1-SQRT((DV_4)**2+(DV_5)**2)-SQRT((DV_2-DV_4)**2+(DV_3-DV_5)**2)+SQRT((DV_2)**2+(DV_1-DV_3)**2)≤0;
DV_1+SQRT((DV_6)**2+(DV_7)**2)-SQRT((DV_6-DV_8)**2+(DV_7-DV_9)**2)-
SQRT((DV_8)**2+(DV_1-DV_9)**2)≤0;
DV_1+SQRT((DV_6-DV_8)**2+(DV_7-DV_9)**2)-SQRT((DV_6)**2+(DV_7)**2)-SQRT((DV_2)**2+(DV_1-DV_3)**2)≤0;
DV_1-SQRT((DV_6-DV_8)**2+(DV_7-DV_9)**2)-SQRT((DV_6)**2+(DV_7)**2)+
SQRT((DV_8)**2+(DV_1-DV_9)**2)≤0;
ACOS(SQRT(DV_3-DV_6)**2/SQRT((DV_1)**2+(DV_3-DV_6)**2))-40≤0。
模型优化的目标是使滑块的最大加速度值最小。设置完成后,进行优化计算。各变量的变化范围在原设计值的±100 mm范围内。计算结果如图5所示(实线部分为优化前的加速度曲线,虚线部分为优化后的加速度曲线,其中Iter 1和Iter 2两条虚线近似重合)。同时,ADAMS软件也能显示优化后各个参数的取值,如图6、7所示。
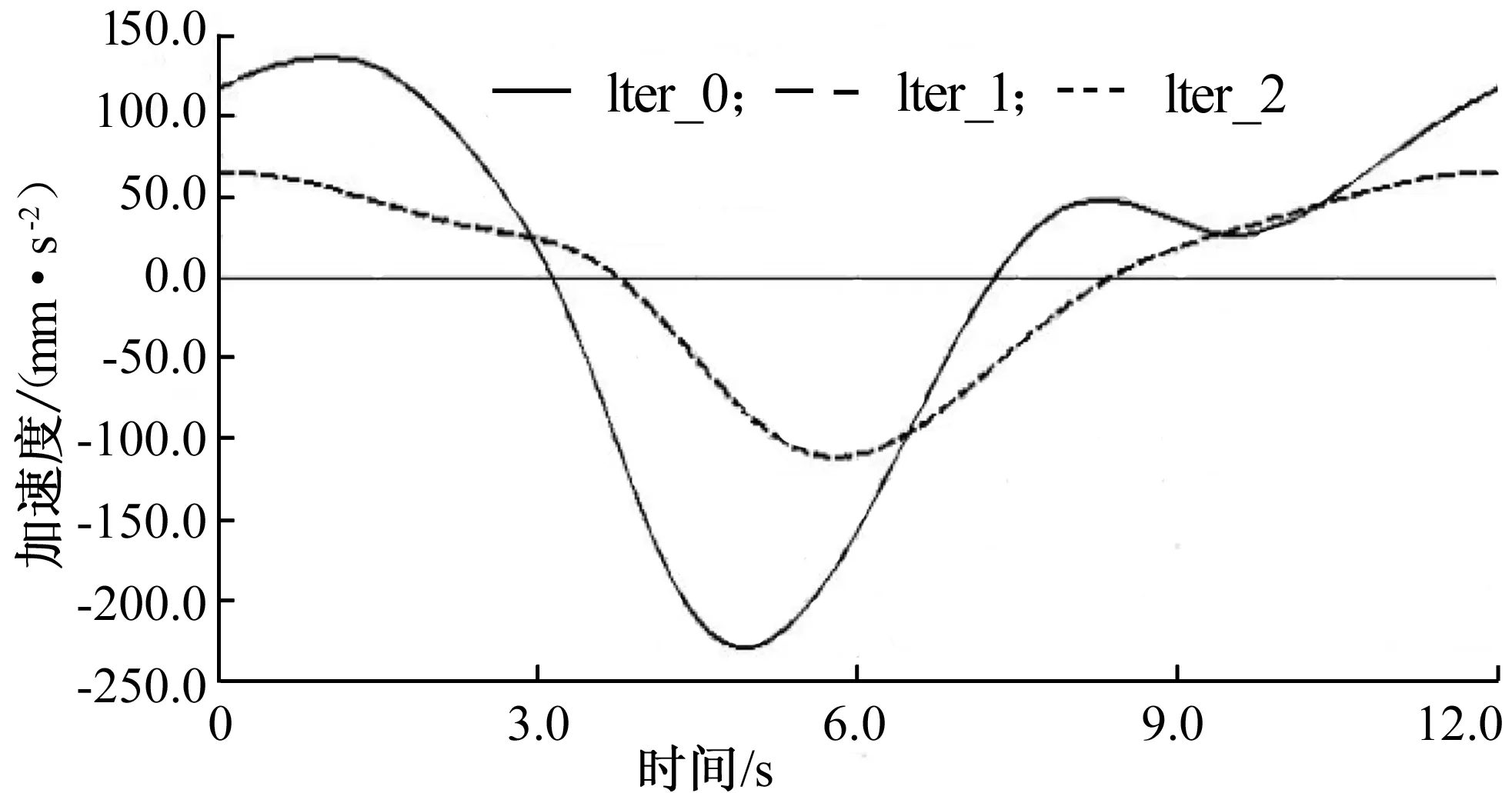
图5 各参数迭算对比图

图6 优化结果数据1
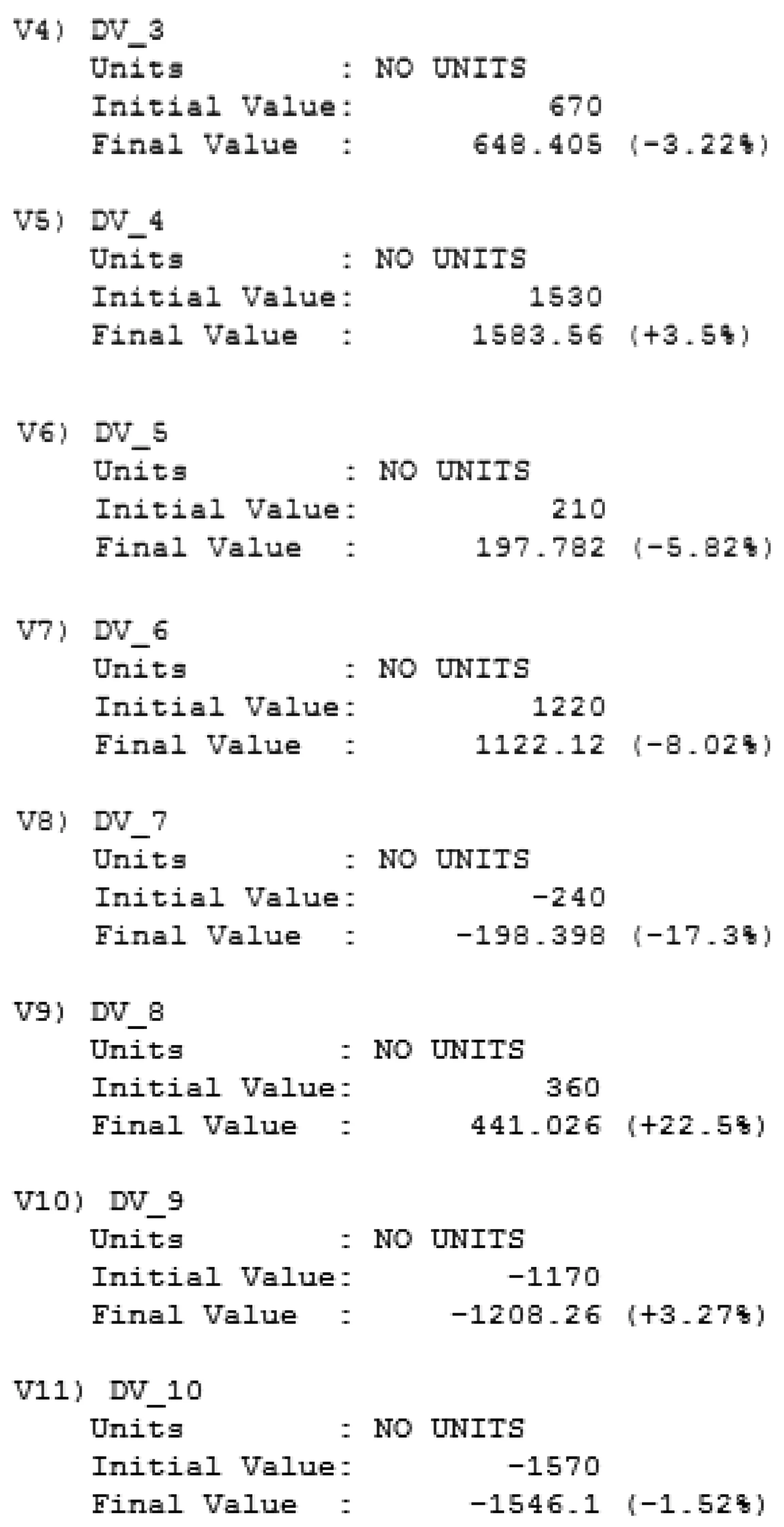
图7 优化结果数据2
根据优化前后各点坐标,可计算出优化前后各构件尺寸,具体数据及优化前后的变化幅度如表2所示。由于仿真模型是在几何点的基础上创建的,参数化几何点的坐标发生变化时,与点相关的杆件尺寸也会发生变化。由图6可见,滑块加速度最大值由初始的136.84 mm/s2变为优化后的65.837 mm/s2,减小了51.9%,优化效果显著。

表2 各杆件优化前后尺寸数据 mm
3 结论
1)本文在ADAMS软件中对八连杆机构进行了参数化建模,采用改变点的坐标形式达到改变构件的运动尺寸,并完成了机构的初始仿真,获得冲头的运动特性曲线。
2)通过创建11个设计变量并分别进行设计研究,在设计范围内进行5次迭算,得到目标函数相对于各设计变量的变化规律,提炼出对机构性能影响最大的变量,在此基础上进行了优化设计计算。
3)优化后获得了较为理想的八连杆机构的结构尺寸,并使得整个机构的加速度最大值由原来的136.84 mm/s2变为65.837 mm/s2,减小了51.9%,优化效果显著,达到了优化的目标和要求。
4)采用ADAMS软件进行参数化建模、仿真、优化,可以减少编程计算等工作,大大提高机构设计与分析的效率。
[参考文献]
[1]杨益.单自由度八连杆机构运动学分析与优化研究[D].扬州:扬州大学,2013.
[2]白育全,文学洙.基于ADAMS的八连杆冲压机构的优化设计[J].延边大学学报(自然科学版),2015,41(2):175-178.
[3]郑秀云.基于虚拟样机技术的多连杆压力机参数化设计与优化[D].武汉:武汉科技大学,2014.
[4]卢卓,王京,宋海涛.基于ADAMS/Insight的六连杆冲压机构的仿真优化设计[J].轻工机械,2012,30(4):57-60.
[5]丘世因,吴海涛,刘泓滨.基于ADAMS的导杆摇杆滑块冲压机构的优化设计[J].新技术新工艺,2011(5):42-45.
[6]冯勇,周朕,李宗靖,等.精压机机构设计与分析[J].机械设计与制造,2014(4):231-234.
[7]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2012:155-172.
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
锻压装备与制造技术(2021年2期)2021-07-19
装备制造技术(2020年2期)2020-12-14
模具制造(2019年3期)2019-06-06
制造技术与机床(2017年10期)2017-11-28
汽车实用技术(2017年16期)2017-09-21
婚姻与家庭·性情读本(2017年1期)2017-02-16
中国塑料(2015年9期)2015-10-14
河南科技(2015年2期)2015-02-27
科技传播(2013年22期)2013-10-17