
复合导引头目标信息融合抗干扰技术研究*
2018-04-18 08:27唐尧文
飞控与探测 2018年2期
邓 军,唐尧文,徐 剑,韩 笑
(1.91851部队·葫芦岛·125001;2.上海航天控制技术研究所·上海·201109;3.中国航天科技集团有限公司红外探测技术研发中心·上海·201109)
0 引 言
制导精度、抗干扰能力是导弹系统设计的重中之重,随着科学技术的迅速发展,战场环境得到了极大拓展。在复杂的战场环境下,如何有效地对抗干扰、识别目标是一项重要的课题。仅采用单一传感器的导弹无法满足未来的作战需求;同时,受弹径、体积、质量以及成本的限制,不可能采用更多、更复杂的先进技术,所以复合制导体制是最简单有效的抗干扰体制。美、苏等军事强国从20世纪70年代末期就已着手研发微波雷达/红外复合导引头。雷达能够克服红外传感器探测距离近、无法全天候作战的不足,而红外传感器可以弥补雷达抗干扰能力较弱、精度较低等缺陷。二者组合实现优势互补,构成一种全新的高性能制导体制,主要用于反舰和反辐射导弹等的末制导[1-2]。
信息融合是利用计算机技术,对按时序获得的若干传感器探测信息,在一定准则下进行自动分析、综合,以完成所需的决策和任务信息处理的过程。信息融合主要包括多传感器监测、数据关联、融合识别、融合跟踪、融合纠错、优化控制及数据库管路等,在军事上得到了广泛的应用。微波/红外复合导引头综合利用了微波测量距离远、红外制导精度高的特点,当目标距离较远时,利用微波传感器进行测角,并进行微波比例导引,同时红外传感器实时测量目标红外信息,在满足一定的条件时,由微波交班至红外,利用红外比例导引方法操纵导弹直至命中目标。但在导弹飞行过程中,受各种复杂环境或干扰条件的影响,有可能出现成导引头交班至虚假目标的情况,本文主要研究的是利用微波与红外传感器进行信息融合,提高导引头的抗干扰能力。
1 信息融合技术
按照所处理信息的抽象程度,信息融合通常分为数据层、特征层以及决策层融合。
1.1 数据层融合
数据层融合对未经预处理的各种传感器探测信息进行数据综合与分析,用于多源图像的复合、分析、理解以及合成同类型雷达的波形等方面,属于最底层融合。数据层融合的优点是保留了尽量多的信息,融合前处理少,融合性能好,但这种融合对传感器依赖性大,目前在数据层上微波/红外复合导引头获得的微波信息是微波测角,而红外传感器获得的是红外脉冲序列,两者无法直接进行融合。因此,微波与红外传感器无法在数据层上进行融合处理。
1.2 特征层融合
特征层信息融合示意图如图1所示。
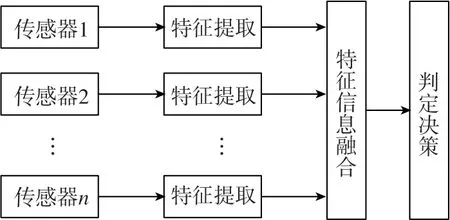
图1 特征层信息融合Fig.1 Feature layer information fusion
由图1可以看出,特征层融合是对经过预处理及特征提取获得的目标特征向量 (位置、角度、角速度等)进行综合处理,在属于中间层融合,其优点是经过适当的预处理,在具备一定的容错和抗干扰性能的同时,保留了足量的重要信息,实现了数据压缩,能够满足导引头实时处理的要求。特征层融合分为状态信息融合和属性融合。融合系统首先对各传感器输出数据进行目标状态信息的实时提取,包括位置、角度、运动参数等,在一定的坐标系和参考时间基准下进行目标状态信息的融合。微波特征层上的信息主要为空间位置、微波测角等信息。红外系统特征层上的信息有目标空间位置、红外能量、红外测角、红外比例跟踪弹目视线角速度等,其信息基本上与微波的特征量相同。因此,微波/红外复合系统的特征层数据能够满足信息融合的可比性和互补性条件,可以进行融合。
1.3 决策层融合
决策层融合是在多个传感器对同一观测目标得出初步结论的基础上,按照特定规则给出最优的全局决策,属于最高级融合。融合过程利用关联、判决等处理,对每个决策的可信度做出最终决策。这种融合方法对传感器依赖性较小、抗干扰性能好、容错性好,但融合前信息处理量大,同时信息损失量较大。决策层融合系统具有较高的灵活性,信息传输量小,能够融合环境等多方面的信息,并且能够实现非同步信息的处理,微波/红外双模传感器系统也可以在决策层进行目标身份联合识别[3-4]。
2 信息融合抗干扰算法
对于微波/红外复合导引头,在微波比例交班至红外比例或在红外比例跟踪过程中,存在各种类型的背景干扰。背景干扰一般来自于目标附近温度较高、可以辐射红外能量的物体,例如云团、云带、海天线、各种人工建筑等。对于点源探测系统而言,各种自然背景类干扰引起的辐射面积、能量的变化与典型目标存在较大的差异。自然背景经红外探测器扫描、信息处理之后,所形成的脉冲特性与典型目标会存在一定的差别,可通过目标特性识别进行区分;但对于某些人工建筑干扰,其所形成的能量脉冲序列与典型目标存在比较类似的特性。当导弹在微波制导飞行过程中,导引头红外传感器探测到与目标特性十分类似的背景干扰时,就有可能误交班至背景环境,导致脱靶量较大。
考虑微波/红外复合系统的特点,其微波传感器及红外传感器探测到的数据量无法直接进行融合。微波传感器利用微波特征锁定目标,通过比相法得到微波测角,微波测角信号反映了目标相对弹体的方位。红外子系统线圈部件和弹体固连,其φ角线圈信号Uφ反映了陀螺指向相对弹体的方位;利用微波测角信号和Uφ测角信号可以得到陀螺指向与目标方位的偏差,利用该偏差信号控制陀螺,使陀螺的进动角速度与目标的视线角速度一致,完成对目标的跟踪,并输出微波比例导引信号。红外传感器与陀螺部件同轴固连,当陀螺根据微波测角进动时,红外传感器实时进行红外信息探测和目标识别。如果识别出目标并满足稳定跟踪目标的条件,则导引头从微波比例导引阶段跳转到红外比例导引阶段,导引头根据红外探测器的目标信息驱动陀螺跟踪目标,则此时的信号Uφ反映了陀螺根据红外传感器获得的位置信息所指向的方位,即红外测角。此时微波传感器也在实时获取微波测角信号,两测角信号分别为陀螺相对于微波目标与红外目标的偏角,两特征可以进行有效的融合,从而实现抗干扰判定。对微波及红外各自得到的目标角度信息进行关联度检测,若关联度较高,则认为导引头未受到有效干扰,交班正确,此时继续进行红外比例跟踪,并实时进行关联度检测;若关联度较低,则认为导引头受到干扰或交班存在异常,及时进行工作模式的切换,快速截获正确目标。
微波、红外传感器分别提取的目标状态信息为:
其中,ρ表示目标在导引头视场内极坐标下离视场中心的幅值,θ表示极坐标下的相位。
令融合观测量

其中,w1与w2分别为权值。y越大,则观测分歧越大,受干扰或误交班的可能性越大;y越小,则观测分歧越小,交班的准确性越高。设定阈值为Y0,当y>Y0,则认为交班存在异常,进行工作模式切换。
为提高判定的准确性,在时域空间进行累计判定。令y(i)=w1[ρ1(i)-ρ2(i)]+w2[θ1(i)-θ2(i)],在一段时间内滑动,累计保存判定序列[y(k-n),y(k-n+1),…,y(k)],k>n,除满足大于阈值Y0的条件,对序列[y(k-n),y(k-n+1),…,y(k)]进行趋势判断,对于干扰导致的误交班,则在测角上会出现逐渐分离的过程,若趋势发散则做出存在交班异常的判定,算法如图2所示,时域上累计信息越大,判断越准确,但实时性相对较差。

图2 信息融合抗干扰算法Fig.2 Information fusion anti-jamming technology
3 仿真验证
设置融合观测序列为[y(k-3),y(k-2),y(k-1),y(k)], 权值分别为w1=1,w2=0.0027,阈值Y0=1.1,在2.0s时设置红外干扰,仿真过程设置时间更新周期为0.1s,信息融合仿真结果如下:
在2.6s左右开始出现个别在阈值附近波动的观测量,在3s左右开始出现连续的一定趋势性,但不明显,因此进行持续观察判断。在3.5s左右,在满足大于判定阈值的前提下,已经出现明显的发散,此时系统做出干扰误交班判断 (从高电平3V跳至0V)。
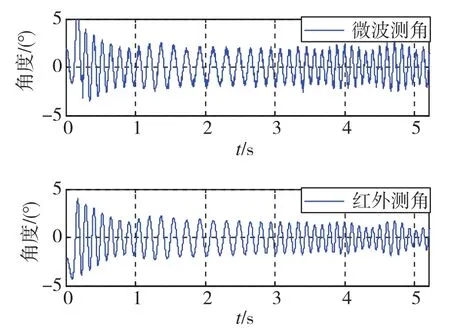
图3 特征信息Fig.3 Feature information
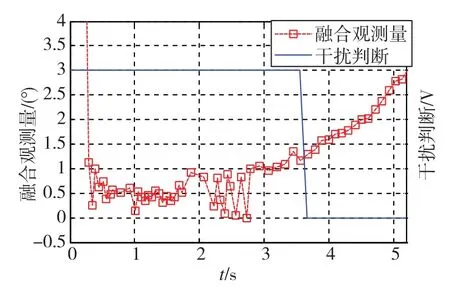
图4 仿真结果Fig.4 Simulation result
4 结 论
在导弹飞行过程中,受各种复杂环境或干扰条件的影响,导引头的抗干扰能力具有不确定性。本文利用了复合导引头中微波传感器与红外传感器的数据信息,在测角特征信息上进行信息融合,在外部存在干扰导致误交班时,及时准确地做出干扰判断,从而便于导引头及时进行工作模式的切换。通过仿真验证,该算法具有数据处理量小、实时性好、判断准确的优点,可以有效地在工程上进行应用。
猜你喜欢
火控雷达技术(2021年1期)2021-04-20
软件(2020年7期)2020-12-24
科学与信息化(2020年4期)2020-10-21
健康大视野(2019年20期)2019-11-12
兵器装备工程学报(2019年10期)2019-11-08
现代防御技术(2019年5期)2019-10-28
空天防御(2019年3期)2019-08-23
雷达科学与技术(2019年2期)2019-05-18
健康必读·下旬刊(2018年10期)2018-12-26
特别健康·下半月(2018年5期)2018-07-02
