
多方位角多基线星载SAR三维成像方法研究
2018-04-17 08:19王鹏波
雷达学报 2018年6期
匡 辉 杨 威 王鹏波 陈 杰
(北京航空航天大学电子信息工程学院 北京 100191)
1 引言
星载合成孔径雷达(Synthetic Aperture Radar,SAR)具备全天时、全天候的工作能力,已成为空间对地观测的重要手段之一。经历了近40年的发展,星载SAR在多波段、多极化、多模式、高分宽幅等方面取得了重要的研究成果,但在目标多方位角3维信息获取方面仍是空白,限制了星载SAR的应用效能。
多方位角星载SAR是指具备方位波束大角度扫描能力,能单航过对同一目标或场景从不同方位角进行观测的天基维波成像雷达系统[1,2],其通过控制方位波束指向,一方面能够增加雷达系统对目标的观测时间,提高方位分辨率;另一方面雷达具备大斜视工作能力,在单航过中可实现广域多目标的灵活观测和重点目标的多方位角精细探测,既可提升雷达系统工作的灵活性,也可获取目标的多方位角散射信息。
多方位角星载SAR在目标3维信息获取方面也具有很好的应用潜能。基于多基线的SAR层析(SAR Tomography, TomoSAR)[3-9]3维成像技术可以解决SAR 2维图像中固有的叠掩问题[10],但是现有的星载SAR系统只能获取观测区域小方位角范围内的3维图像,无法获取复杂、不规则目标中被遮挡部分的3维信息。遮挡现象在城市区域尤为严重[4,5],文献[6,7]通过将升降轨获取的3维图像融合处理可以减少遮挡区域,但获取升降轨图像数据需要较长时间,且仍仅获取了左右正侧视两个方向的观测信息。为此,本文首次提出了多方位角多基线星载SAR 3维观测模型,其不仅可通过多基线3维成像解决SAR 2维图像中的叠掩问题,还可通过融合不同方位角下的3维点云减少了遮挡区域,可提升星载SAR观测性能。但为得到融合后的多方位角3维点云,需要解决方位斜视观测时的多基线3维成像和多方位角3维点云融合两大难题。目前尚无论文开展方位斜视观测时的多基线3维成像技术的研究,文献[11]分析了方位斜视时的干涉信号模型,具有借鉴意义。在3维点云融合方面,文献[7]则是先将3维点云投影到地面估计建筑物的轮廓,在此基础上利用建筑物侧面垂直于地面的先验信息,将左右侧视获取的3维点云进行融合得到重建后的3维建筑,但该方法不适用于有复杂3维结构的目标。文献[12]提出了一种基于立体像素网格的融合方法,并已应用于多基线机载SAR 3维点云融合中,取得了较好的效果,该方法也适用于不同方位角下3维点云融合处理。
基于上述分析,为获取目标的多方位角3维信息,本文首先建立多方位角多基线星载SAR 3维观测模型,并推导论证方位斜视观测时的多基线3维成像信号模型与正侧视时具有统一的形式,因此可以直接将正侧视多基线3维成像方法应用于方位斜视模式;进一步分析方位配准精度对3维成像的影响,并指出方位配准精度随着方位斜视角的增大而增大;讨论3维点云生成方法和多方位角3维点云融合方法;在上述分析的基础上,提出多方位角多基线星载SAR 3维成像方法,并给出3维成像处理流程,最后通过点目标和直升机模型仿真实验验证本文方法的有效性。
2 空间成像几何模型与信号模型
2.1 空间成像几何模型
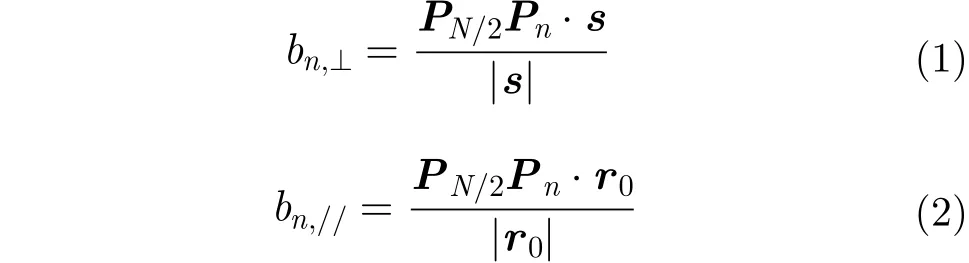
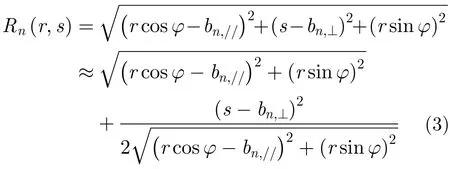
为了获取方位斜视观测下的3维图像,建立了如图2所示的斜视多基线星载SAR 3维成像几何模型,假设卫星利用多航过对目标区域进行了次观测,且每次观测的方位角均为,以第次观测模型为参考,建立直角坐标系,卫星沿轴方向飞行,飞行速度为,表示第次观测时卫星位置,其位于平面内,为高度向,其垂直于斜距成像平面,且平行于平面,垂直于轴和轴,直线为平行基线方向,其位于平面内,且平行于轴,为到平面的距离,为与之间的距离,为与之间的距离,由图中几何关系可知影,则可以得到垂直基线和平行基线分别为
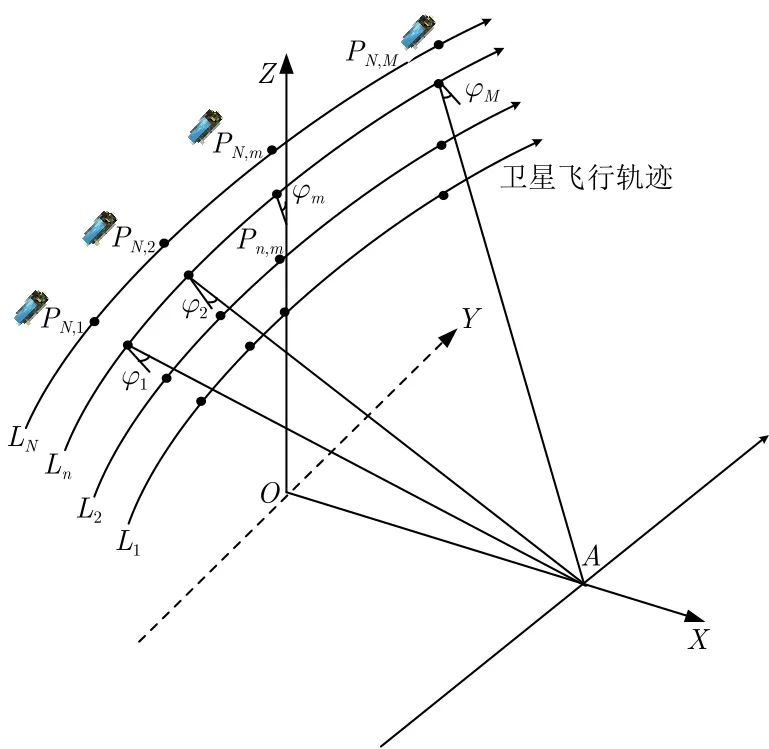
图1 多方位角多基线星载SAR观测模型Fig. 1 Obsevation model of multi-azimuth-angle multi-baseline spaceborne SAR
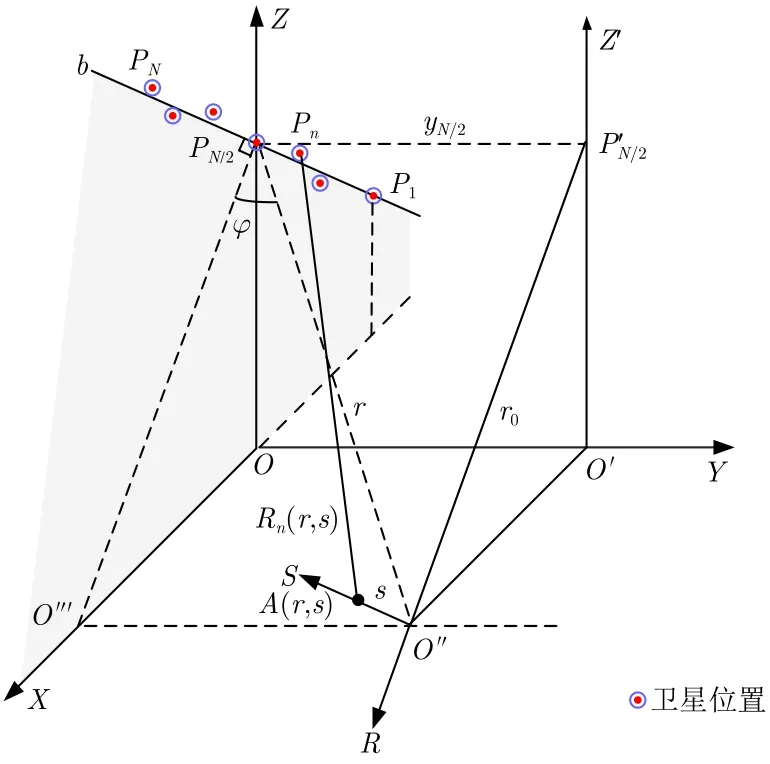
图2 斜视多基线星载SAR 3维成像几何模型Fig. 2 3D imaging geometry of squinted multi-baseline spaceborne SAR
2.2 信号模型
假设获取的原始数据已经采用2维成像算法完成聚焦处理,并得到了2维复图像数据,且选择第图像为主图像,并将其它图像与主图像进行配准,图像配准方法在后文中将进行详细讲述。则基于Born近似,第幅图像中的信号具有如下形式[8,9]:
将式(5)代入式(4)中,则有
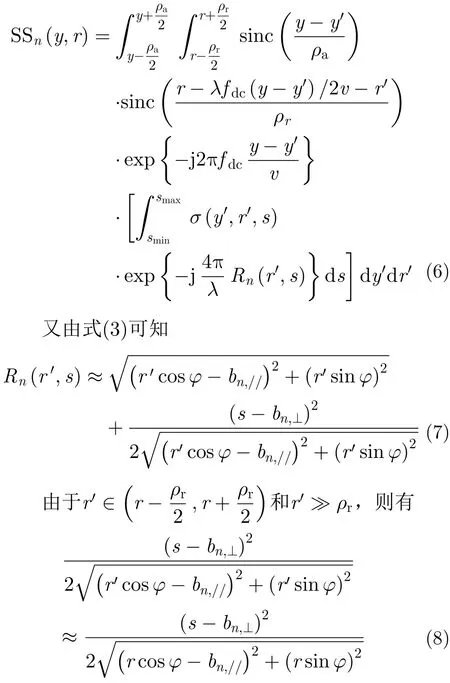
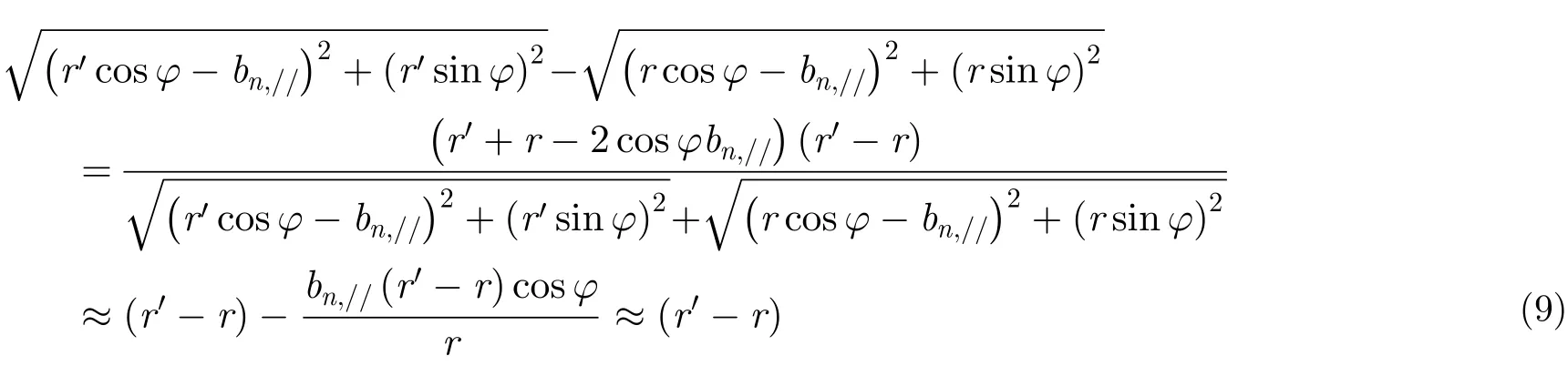
因此,式(7)可以写成如下形式:
将式(10)代入式(6)中,则有
对于2维图像中一特定的像素单元,式(11)中中括号内的二元积分项为定值,可以表示为如下形式:
式(12)表明经过2维成像后,3维目标的散射系数可以看作是在同一像素单元内的多个目标经过方位、距离的幅度和相位调制的结果,因此式(6)可以简化为
由式(13)可以看出,方位斜视观测和正侧视观测时的信号模型具有统一的形式,传统基于正侧视观测的SAR 3维信号模型是式(13)的一个特例,即方位角为零0°。但对于散射特性随方位角变化的目标,在不同方位角观测时,式(12)中的二元积分项会不同,则经过3维反演后的3维散射系数也存在差异,其对后续的3维点云融合也有影响。本文主要从理论上分析说明多方位角多基线星载SAR 3维成像的可行性,因此假设目标散射特性不随方位角变化,但在后续研究将会分析散射特性空变性对3维点云融合的影响。
3 多方位角多基线星载SAR 3维成像方法与流程
3.1 星载SAR斜视3维成像方法
基于式(13)的统一信号模型,则用于处理正侧视多基线SAR数据的方法也可以直接用于处理斜视多基线SAR数据。目前,SAR 3维成像处理方法主要分为3类,分别是基于傅里叶变换的方法、基于现代谱估计的方法和基于压缩感知理论的方法。本文重点研究星载SAR斜视3维成像机理,同时考虑未来星载SAR可通过轨道优化设计、多星组网等方式获取高度向均匀、过采样信号,因此本文采用基于傅里叶变换的方法进行高度向数据处理。
为实现高度向信号的聚焦,首先需要将高度向信号的2次相位补偿掉,使得高度向信号的频率范围校正到零频附近,其可通过将高度向信号与参考目标信号进行共轭相乘实现,该步骤也称为去斜,文献[9]对高度向信号去斜进行了详细说明。但为了计算参考目标信号,需要成像区域的参考地形(如DEM参数),在初始DEM无法获取或者DEM数据精度不够时,可采用SAR图像立体定位方法[13]获取DEM数据。在地形已知的情况下,参考目标信号可以表示为

去斜后信号为

由式(16)可以看出,高度向采样信号可看作是高度向目标散射信息的频谱在处的采样,因此通过逆傅里叶变换即可重构高度向的散射信息,即

3.2 斜视SAR图像配准精度分析
在3维成像处理前,需要对原始2维图像数据进行配准。实际中,图像难以做到完全配准,因此需要分析配准误差对3维成像的影响。
为了简化分析,假设一个像素单元内仅有一个目标,且像素单元内信号不受其它像素单元目标的影响。若目标刚好落在像素单元中心,第幅图像无配准误差时,其信号模型为
比较式(21)和式(20)可以看出,当存在配准误差时,信号不仅在幅度上有差异,在相位上也发生了变化。幅度上的差异受函数的包络调制影响,而相位的变化是由于方位向“斜坡”相位引起的,图3对这一现象进行了说明。
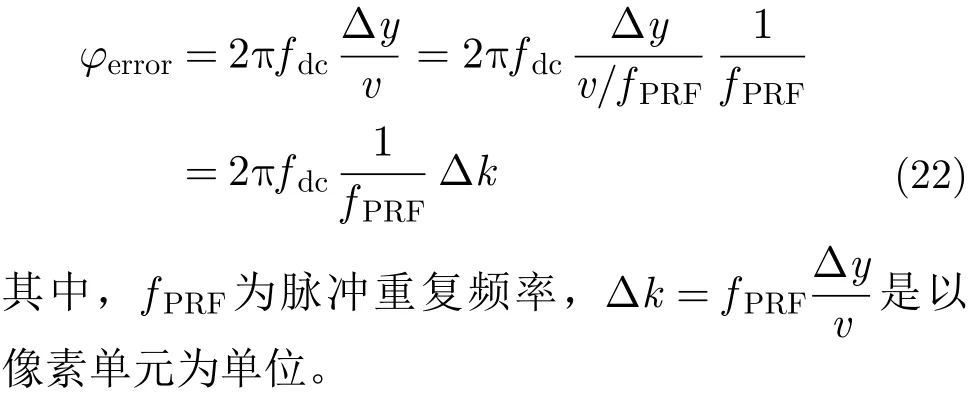
通常情况下,采用分块精配准处理,图像配准精度可优于0.1个像素单元[14]。文献[15]的分析结果表明,在图像配准精度达到0.1个像素单元时,其对3维成像的影响可以忽略。但上述文献中的分析针对的是正侧视观测情况,正侧视观测时多普勒中心频率为0,因此方位向配准误差不会引入相位误差。但在斜视条件下,方位向配准误差引入的相位误差不可忽略,方位向配准误差引入的相位误差如式(22)所示:
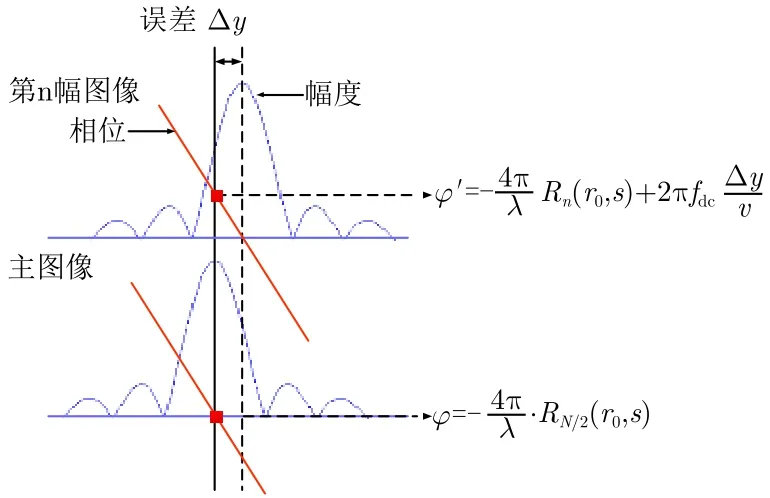
图3 方位向配准误差影响分析示意图Fig. 3 Influence analysis of the registration error in azimuth

基于表1中的仿真参数,仿真分析了方位向配准精度需求随方位角的变化关系,其结果如图4所示,可以看出随着方位角的增大,方位向配准精度要求越高,当方位向斜视角为45°时,方位向配准误差要控制在0.01个像素单元以内。
为了进一步验证上述分析的合理性,图5给出了方位角为45°下不同配准误差时高度向成像结果。由图5可以看出,当配准误差大于0.01个像素单元时,旁瓣抬升,成像质量严重恶化,验证了上述理论分析的正确性。
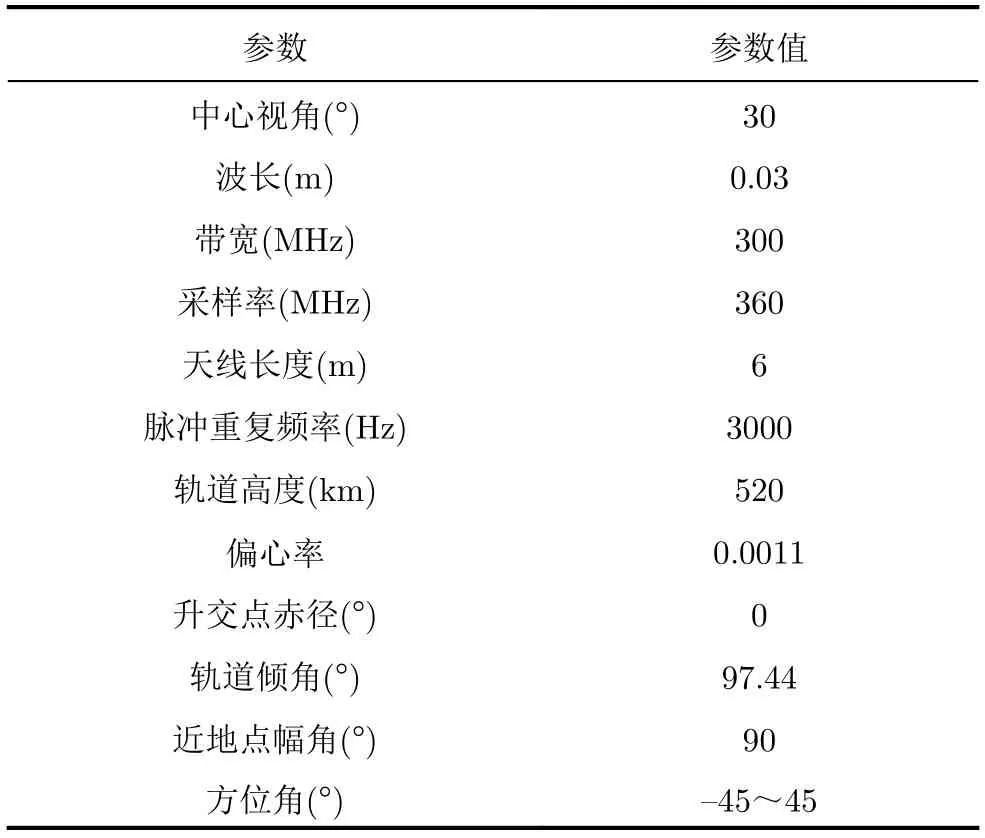
表1 仿真参数Tab. 1 Simulation parameters
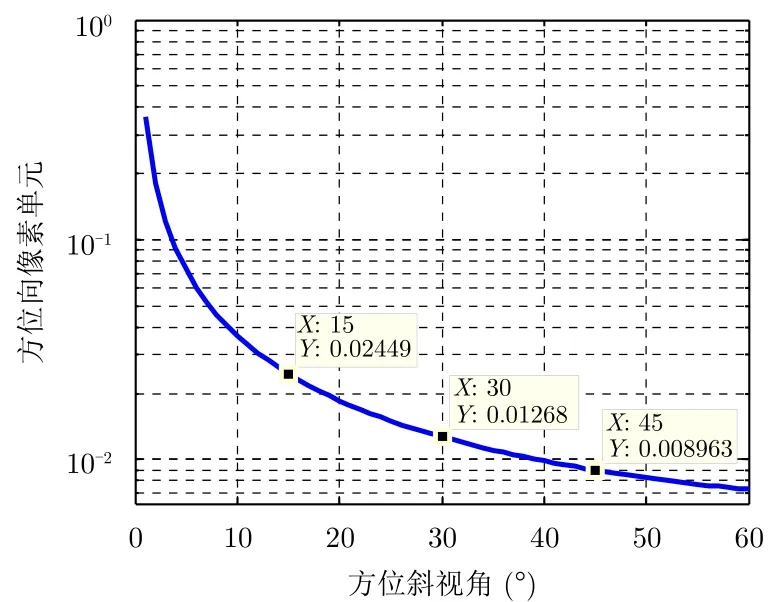
图4 方位向配准精度随方位角的变化关系图Fig. 4 The relationship between azimuth registration accuracy and azimuth angle
为了确保高度向成像质量,本文采用基于频谱分割差分相位的配准方法[16]完成SAR图像的精配准。该方法已经应用于干涉SAR图像的配准中,机载SAR真实数据处理结果表明该方法的配准精度优于0.01个像素单元[16]。在实际场景中,若目标区域高程起伏较大,可将场景区域划分更小的子块,逐子块进行精配准。同时,为了保证高度向成像质量,本文建议斜视多基线星载SAR 3维成像时,其方位角不超过45°。
3.3 3维点云生成与融合方法
对于星载SAR系统,由于多基线2维图像数据获取需要间隔较长时间,非永久散射体目标相干性较差,在高度向处理中相当于噪声,因此需要通过3维点云生成步骤去除非相干目标点,只保留永久散射体目标。为了获取3维点云,首先对每个方位/距离像素单元沿高度向用惩罚似然准则的方法[3]估计目标个数,即模型阶数选择,并获取目标的散射信息;进一步根据空间成像几何关系可得到每个目标的3维坐标;最后,将各目标点3维坐标转换到地心转动坐标系中,即可得到3维几何校正后的3维点云。当获取了多个方位角的3维点云后,可采用基于立体像素网格的融合方法进行3维点云融合[12]。利用该方法可在转动地心坐标系下进行3维立体网格划分,网格像素间距可根据3维分辨率设定,根据已知目标点的位置信息可确定目标在3维立体网格中的位置。由于多方位角的3维点云存在重复目标点,当一个3维立体网格中存在多个目标点时,则分别以这些目标点的幅度和几何位置参数的平均值当做该网格目标的幅度和几何位置参数。通过幅度平均,还可以一定程度上缓解目标散射系数随方位角的空变性。通过上述处理,则可以得到多方位角3维点云融合后的图像。需要注意的是,受论文篇幅影响,本文在3维融合处理中没有考虑目标散射系数随方位角的空变性对3维点云融合的影响,在后续的研究将对此进行进一步分析。
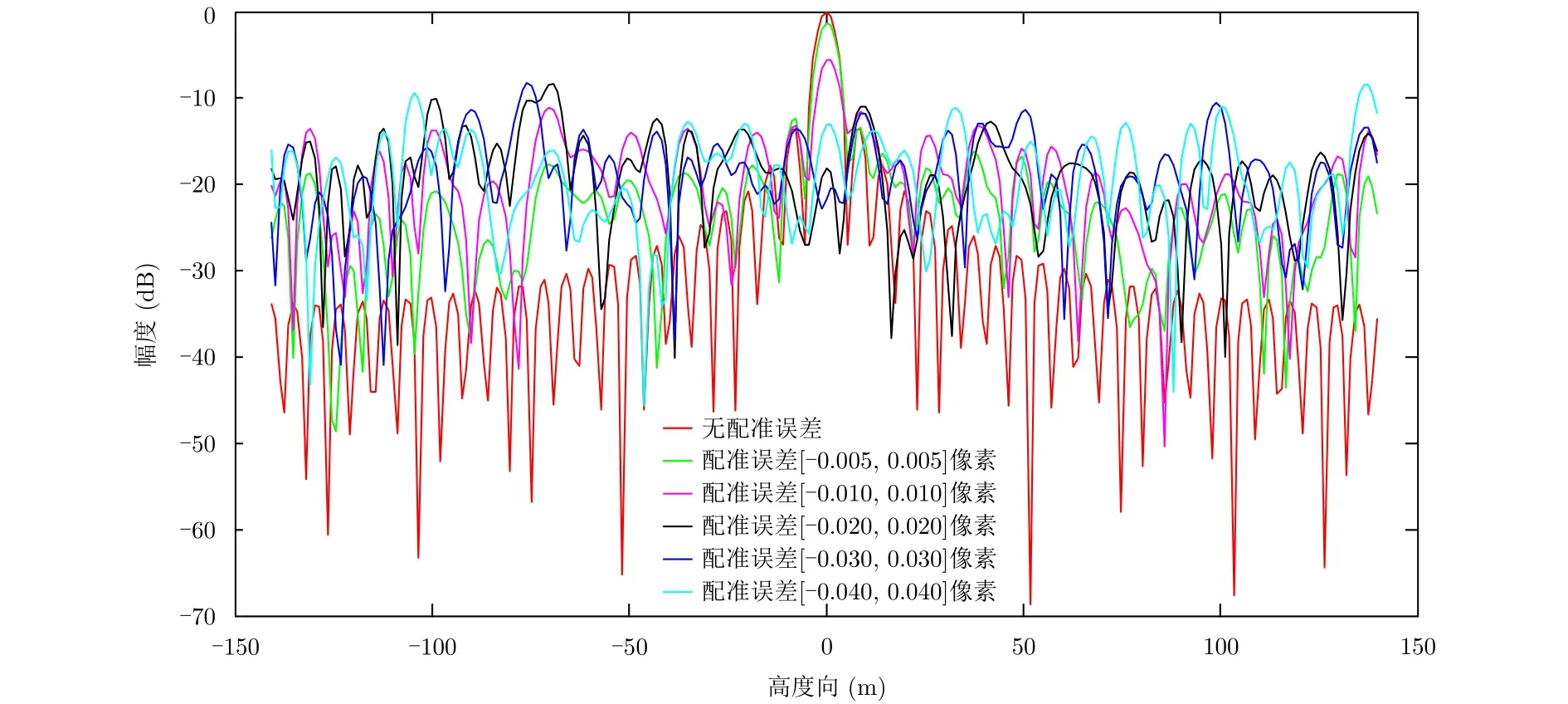
图5 方位向配准误差对高度成像影响分析结果Fig. 5 Effect of azimuth registration error on elevation imaging
基于上述分析,多方位角多基线星载SAR 3维成像处理流程如图6所示,主要包括SAR斜视3维处理和多方位角3维点云融合两个步骤。首先,利用单方位角下获取的多基线数据经过斜视SAR图像配准、去斜处理、高度向处理和3维点云生成,可得到单角度的3维点云图像,再将多个方位角的3维点云通过融合处理,即可得到目标的多方位角3维图像。
4 仿真实验
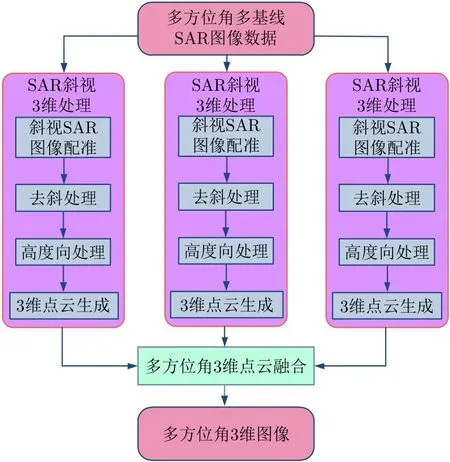
图6 多方位角多基线星载SAR 3维成像处理流程Fig. 6 3D imaging flowchar of multi-azimuth-angle multi-baseline spaceborne SAR
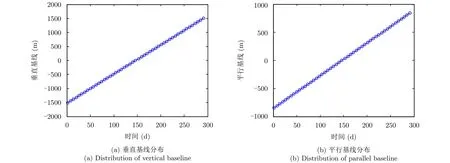
图7 基线分布图Fig. 7 Distribution of baseline
为了验证本节提出的多方位角多基线星载SAR 3维成像处理方法的有效性,分别进行了点阵目标和直升机模型仿真实验,仿真参数如表1所示。通过合理设计轨道,可利用轨道重访获得均匀基线分布,图7给出了方位角45°观测时得到49条基线分布图,从图7(a)可以看出垂直基线总长度约3000 m,相邻垂直基线间距约63 m,根据式(18)和式(19)可求得高程向分辨率和最大无模糊高程分别约为2 m和90 m;图7(b)中的平行基线长度约为1700 m,远小于斜距长度。
4.1 点阵目标仿真实验
点阵目标场景分布如图8所示,其包含5个离散点目标,图9给出了方位角为45°时3维成像结果。图9(a)为点阵目标的压缩结果,可以看出目标均被压缩到正确的位置;图9(b)-图9(d)分别为中心点目标在方位向、斜距向和高度向的剖面图,其中斜距向剖面图是根据式(4)沿斜距向最大值方向获取的,而不是直接沿垂直方位向,可以看出目标得到了精确聚焦。上述仿真结果验证了本文提出的星载SAR斜视3维成像方法的有效性。
4.2 直升机模型仿真实验
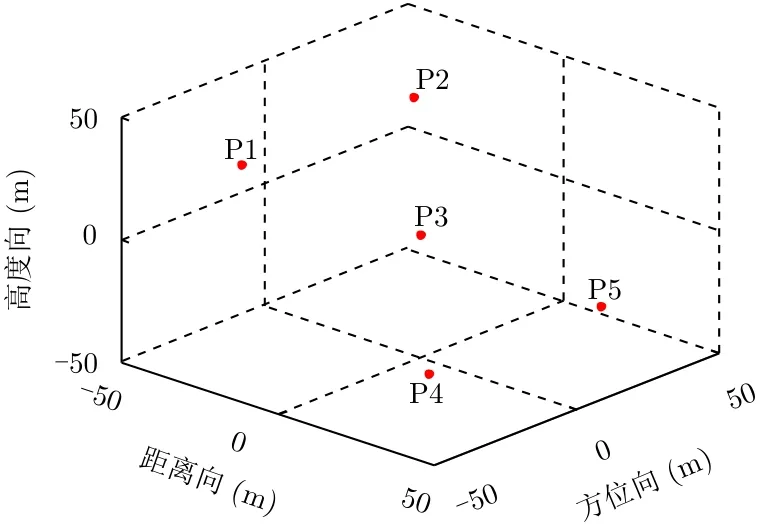
图8 点阵目标3维分布图Fig. 8 3D distribution map of point targets
为进一步说明多方位角多基线星载SAR 3维成像在解决叠掩与遮挡方面的优越性,进行了多方位角3维成像实验。仿真中使用的直升机3维结构模型如图10所示。基于直升机3维结构模型,采用时域有限差分方法(Finit-Difference Time-Domain method, FDTD)[17]可获取不同方位角观测下直升机模型电磁散射系数,如图11所示,图11(a)和图11(b)分别为方位角为45°(前斜视)和-45°(后斜视)下的仿真结果,图中每个点表示一个散射单元,其电磁散射系数进行了归一化处理,并用不同的颜色进行编码(为了匹配系统的分辨率,实际仿真中将直升机模型等比例放大了16倍)。从图11(a)和图11(b)中可以看出明显的遮挡效应,不同方位角下获取的电磁散射结果也具有较大差别。图11(c)给出了±45°斜视角下获取的电磁散射单元融合后的结果(仅考虑了散射单元位置,忽略了电磁散射系数大小),其中红色和蓝色分别表示方位角-45°和45°时可观测的散射单元,可以看出通过多方位角度融合可得到直升机的较完整的结构模型,进一步说明采用多方位角观测获取3维图像的必要性。
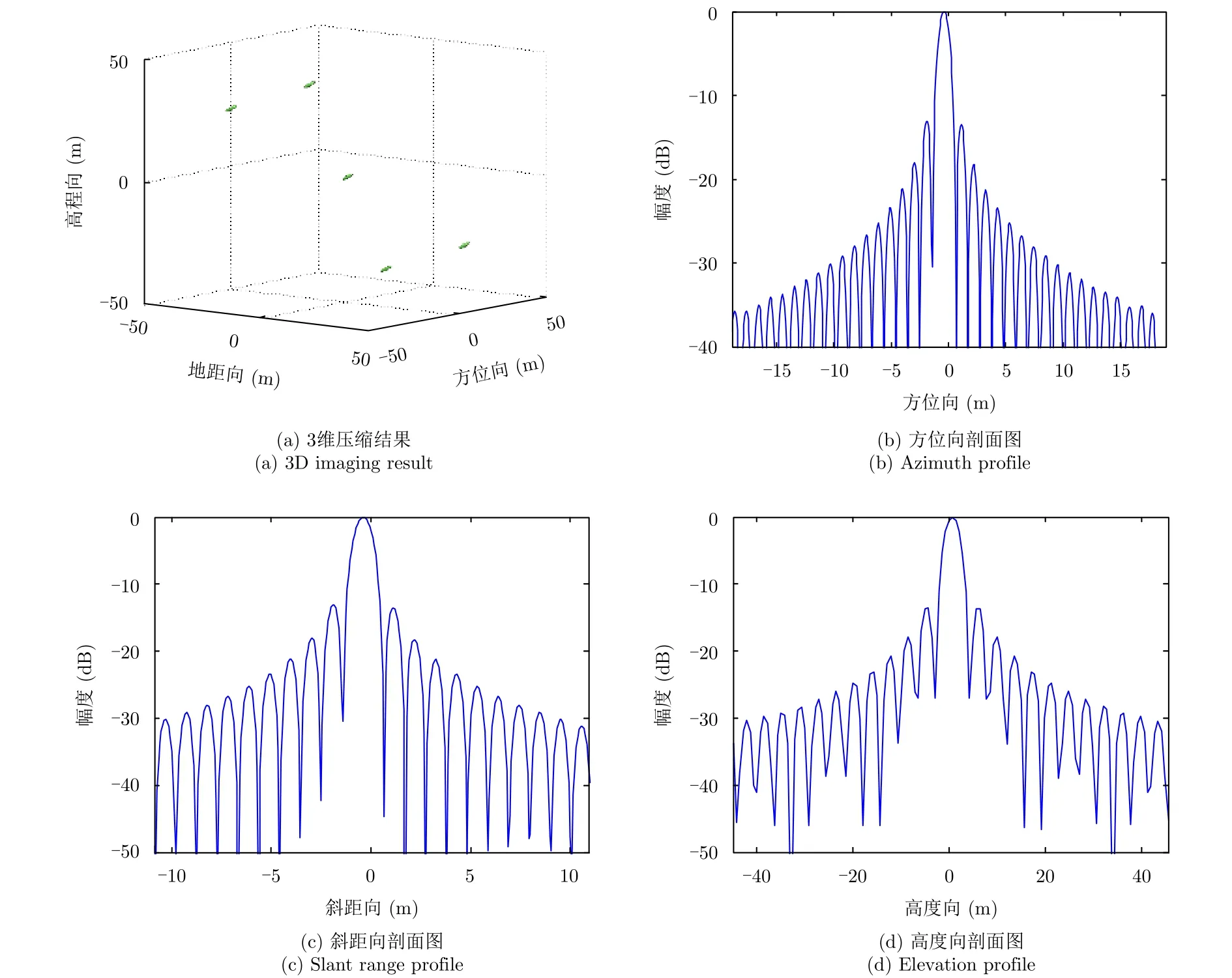
图9 点目标3维成像结果Fig. 9 Imaging results of point targets
在卫星每次飞行过程中,通过调整方位波束指向,对仿真场景进行了2次观测,分别为方位角45°和-45°,并且通过轨道重访得到了49轨数据。
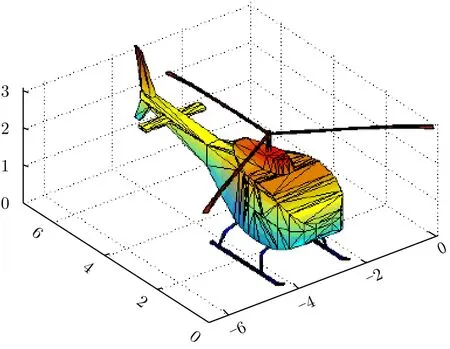
图10 直升机3维结构模型Fig. 10 3D structure model of the helicopter
采用本文提出的3维成像方法分别对45°和-45°方位角下获取的2维图像序列进行数据处理,得到3维成像结果如图12所示。图12(a)和图12(b)分别为方位角45°和-45°时的3维点云结果,其中目标点归一化后的散射系数用不同颜色显示,图中目标的3维结构与图11中的仿真模型一致,进一步验证了本文提出的斜视3维成像方法的有效性。图12(c)给出了将方位角45°和-45° 3维点云融合后的结果。可以看出,经过3维点云融合后,可获取目标更全面的3维信息,展现了多方位角多基线星载SAR在3维成像方面的优越性。
5 结论
本文针对多方位角多基线星载SAR 3维成像技术开展研究,首先建立多方位角多基线星载SAR空间观测模型,进而推导多基线星载SAR统一的3维成像信号模型,在此基础上提出星载SAR斜视3维成像方法,分析斜视条件下图像配准精度对3维成像质量的影响,并给出星载SAR 3维点云生成与融合方法和处理流程。最后,通过点阵目标和直升机模型仿真实验验证本文方法的有效性。本文从理论上说明了多方位角多基线星载SAR 3维成像的可行性,但仍存在较多不足,在后续研究将对以下问题进行深入的分析:(1)进一步研究目标散射系数空变性对多方位角3维点云融合的影响,并提出有效的补偿方法;(2)当存在系统误差时,不同方位角下获取的3维点云在地心转动坐标系下存在位置偏移,无法直接进行融合处理,需要先对不同方位角获取3维点云进行配准,再进行融合处理,因此需要进一步研究3维点云配准方法。
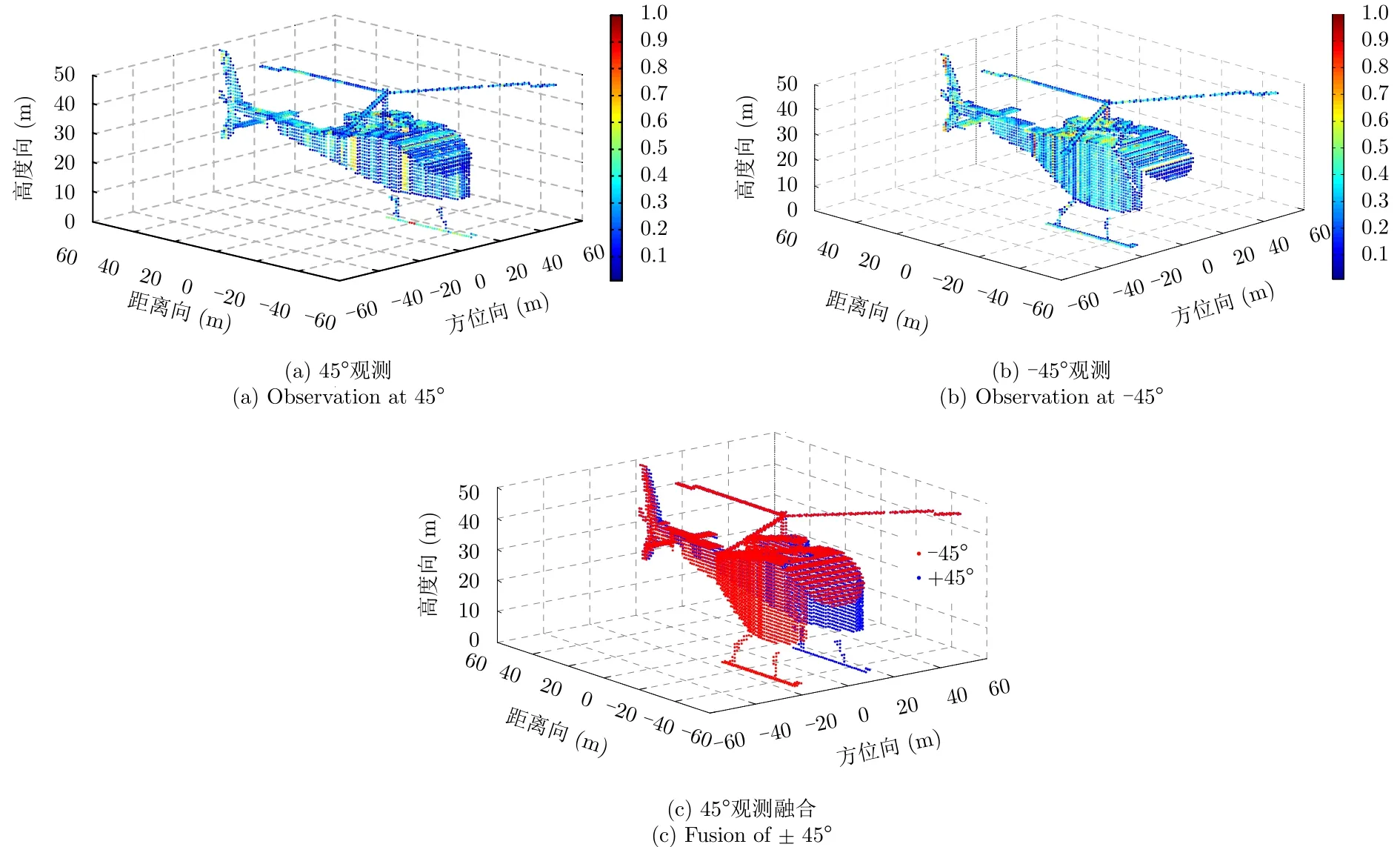
图11 直升机模型电磁散射仿真结果Fig. 11 Simulation results of electromagnetic scattering from helicopter model
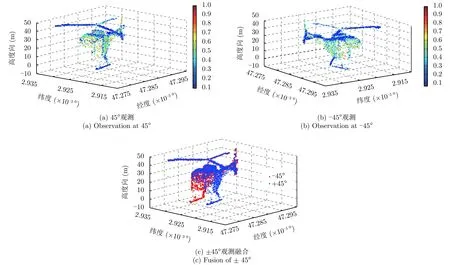
图12 直升机目标45°和-45° 3维成像结果Fig. 12 3D imaging result of the helicopter target at ±45°
猜你喜欢
导航定位学报(2022年4期)2022-08-16
导航定位学报(2021年5期)2021-10-13
康颐(2020年14期)2020-11-10
导航定位学报(2019年2期)2019-06-06
舰船电子对抗(2019年6期)2019-04-27
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
科技创新与应用(2016年9期)2016-05-14
中老年健康(2016年1期)2016-03-07
光学仪器(2014年6期)2015-01-22
中华家教·幼儿版(2014年6期)2014-09-15
