
MIMO雷达三维干涉诊断成像方法
2018-04-17 08:19许小剑刘永泽
雷达学报 2018年6期
许小剑 刘永泽
①(北京航空航天大学 北京 100191)
②(石家庄铁道大学 石家庄 050043)
1 引言
高分辨率雷达成像是目标雷达散射截面(Radar Cross Section, RCS)测量的重要组成部分,是分析和理解复杂目标散射机理的有力工具。目前,用于雷达目标散射诊断的成像技术主要包括转台逆合成孔径雷达(Inverse Synthetic Aperture Radar,ISAR)成像技术[1-4]和基于导轨机械扫描的合成孔径雷达(Synthetic Aperture Radar, SAR)成像技术[5-7]。这两种技术虽然可以实现近距离测量,但是数据采集时间较长、测量效率较低。采用阵列天线成像技术可以解决数据采集时间问题,只需一次快拍即可完成数据采集。然而,针对全尺寸雷达目标RCS测量,高分辨率成像要求大的阵列孔径,也即需要采用大量的天线阵元,故工程应用上实现难度大、成本较高。多输入多输出(Multiple-Input Multiple-Output, MIMO)雷达[8-11]是近年来得到快速发展的一种新体制雷达技术,通过MIMO稀布阵列合成虚拟雷达孔径,可实现快拍数据采集和成像。在保证分辨率和自由度的前提下,与传统阵列雷达相比其所需的天线单元数目大幅减少,从而可大大节约雷达系统研发成本,提高成像测量效率。
针对目标散射诊断成像测量问题,法国学者Massaloux和Bérisset[12]首次给出了金属圆柱的近场MIMO雷达像,并与单站转台ISAR像进行了比较研究,指出它们具有高度的一致性。俄亥俄州立大学Stewart等人[13]构建了正交波形机制的MIMO雷达成像系统,可工作于时间分集(Time Diversity,TD)和正交编码波形(Wave Diversity, WD)两种模式下,并对直径46 cm的金属球进行了测量实验,通过比较两种工作模式下的点扩展函数,指出伪随机噪声正交编码波形的性能与TD模式下的性能高度一致。中电41所Sun等人[14]设计了1维线性超宽带MIMO雷达阵列,构建了用于目标近场RCS成像测量的原理样机。Yan等人[15]提出了一种可用于2D,3D近场成像的MIMO雷达系统,阵列为“十”字面阵设计,通过发射单频信号进行2D图像重建,发射宽带信号进行3D图像重建。近年来,北京航空航天大学[16-18]遥感特征实验室在MIMO阵列设计、近场成像算法、雷达系统校准等方面也开展了较为系统的研究。
同传统2维雷达像相比,目标3维雷达像可提供复杂目标局部散射中心的空间3维位置及其散射强度信息。因此,对于从事雷达目标散射诊断测量的研究人员来说,探索一种可工程实现和实用的3维成像技术极具吸引力。Wang等人[19]提出了一种采用3通道接收机的ISAR成像系统,通过从多个角度获取的2D ISAR像可重构机动目标的3D像。Xu等人[20]开展了InISAR(Interferometric ISAR, InISAR)3维干涉成像技术在复杂目标电磁散射特性分析和建模中的应用研究,详细分析了相同位置存在多个散射中心时的高程解算问题,并指出双天线地平面配置是目标诊断成像的最优配置。肖志河等人[21]利用高度不同的双天线结构获取了转台目标的3维雷达像。近些年来,基于导轨SAR和阵列扫描技术的3D成像得到了快速发展,Nico等人[22]提出了一种新颖的地基干涉合成孔径雷达技术,其将雷达天线安置于可饶导轨转动的机械臂上,通过转动机械臂获得水平和垂直两条基线,可对数平方公里的区域进行测绘。意大利IDS公司[7]研制的近场扫描测量系统,其通过安装于平面扫描架上收/发天线进行线性或平面扫描,由此获得目标的2D或3D雷达像。中科院电子所杨晓琳等人[23]提出了一种针对3D SAR成像应用的幅相误差不一致性校准方法,可较好解决3维成像中的散焦问题。
采用MIMO体制实现目标散射特性诊断成像的难点之一是如何通过系统性的校准和旁瓣抑制处理,获得具有大动态范围的MIMO雷达像,北航遥感特征实验室刘永泽等人[16]较好地解决了这一问题。以上述技术为基础,本文提出了一种基于多输入多输出阵列技术的3维干涉成像方法,通过采用位于不同高度上的稀布阵列天线单元的组合测量,形成高度维虚拟合成孔径基线,由此实现对复杂目标的MIMO雷达3维干涉成像测量。首先,设计并试验了一种具有高孔径利用率和通过虚拟孔径实现干涉成像功能的MIMO阵列;其次,分析了MIMO阵列合成的两组虚拟孔径所成两幅2维雷达像的干涉相位与目标散射中心高度之间的关系,发展了MIMO雷达3维干涉成像算法;最后,通过数值仿真和原理样机实验验证了所提方法在目标散射机理分析和诊断测量中的可行性和有效性。和现有3维干涉成像诊断方法[7,19-22,24]相比,本文所提方法具有测量效率高、成本低和环境适应性强等优势。
2 阵列设计
本文设计的MIMO阵列结构如图1所示[16,18],发射阵元位于阵列两端部位,接收阵元位于阵列中间部位,从而保证孔径利用率最大。图1(a)为收/发阵元与虚拟阵元之间的基本几何关系,以接收阵元的高度为基准,发射阵元的高度取为;虚拟阵元位于发射阵元与接收阵元连线的中点,即直角三角形斜边的中点;根据相似三角形的等比关系有的长度为直角边长度的而与另一条直角边的 长度无关,即。据此分析,高度为的线性发射阵列与高度为0的线性接收阵列合成的虚拟阵列仍为线性阵列,其高度为。图1(b)为具有干涉功能的MIMO阵列结构,以接收阵列所在平面为基准面,发射阵列的高度为,发射阵列的高度为。与合成的虚拟成像孔径位于高度为的水平面上,与合成的虚拟成像孔径位于高度为的水平面上。成像孔径和之间的高度差为干涉成像的基线长度。阵列中的收发阵元间隔设置参见文献[16]。
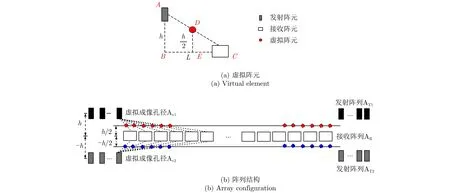
图1 MIMO阵列设计Fig. 1 MIMO array design
3 信号模型及算法
3.1 信号模型
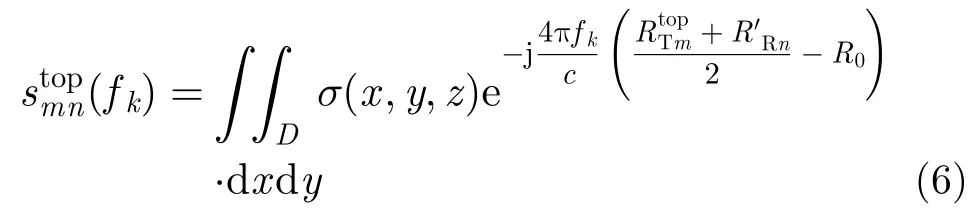
本文发射信号采用步进频率脉冲信号,多输入多输出阵元信号分离方式为时间分集(TD)模式[16]。假设一组发射信号由个单频脉冲组成,上部发射阵列与接收阵列构成的MIMO阵列中,第个发射阵元与第个接收阵元的回波信号为
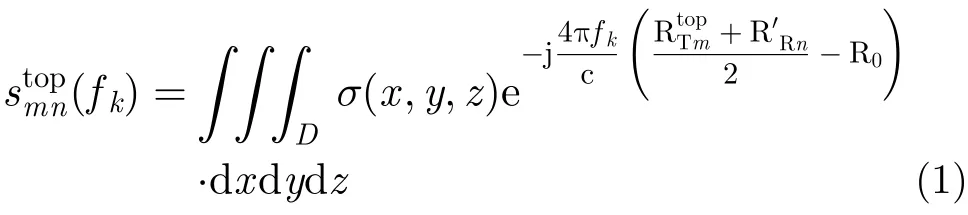
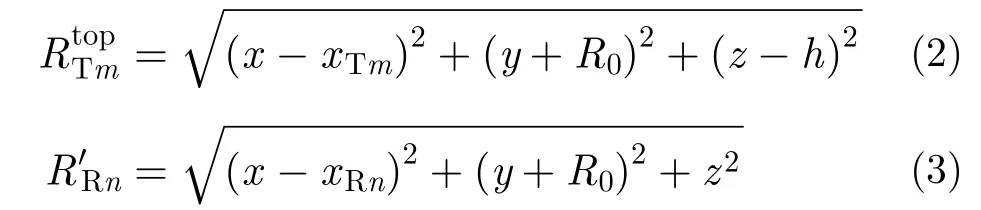

其中,

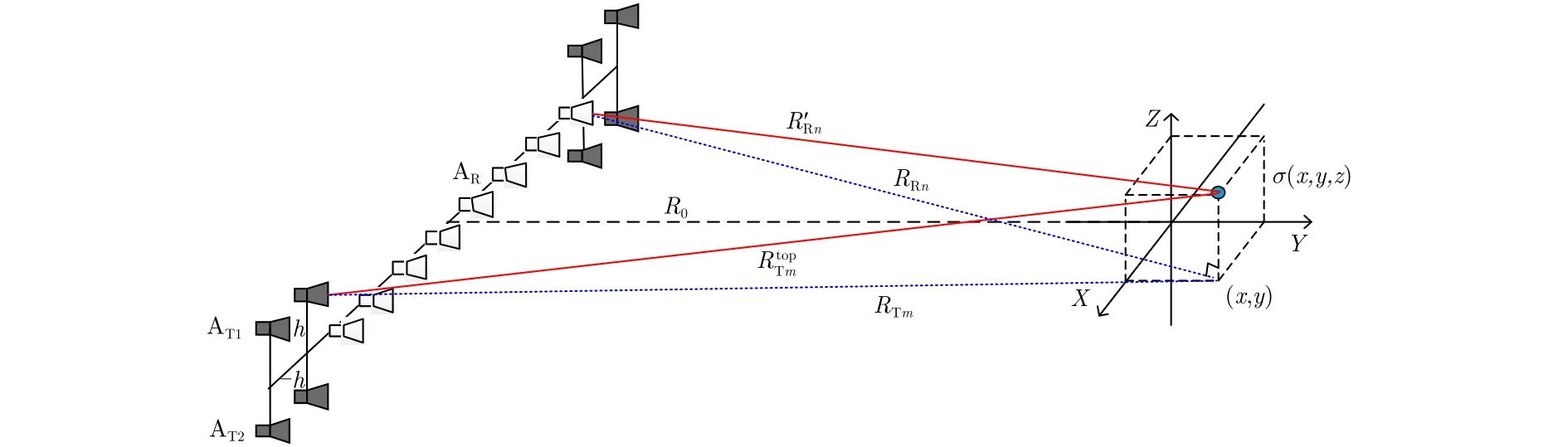
图2 3维干涉成像几何关系Fig. 2 Three-dimensional interferometric imaging geometry
在实际成像测量中,要求目标在z轴方向(高度维)满足远场条件。以图2上部发射阵列与接收阵列的组合为例进行推导,假设每一个位置只对应一个高程,此时,回波模型变为式(6),积分号由三重积分变为两重积分。
其中,
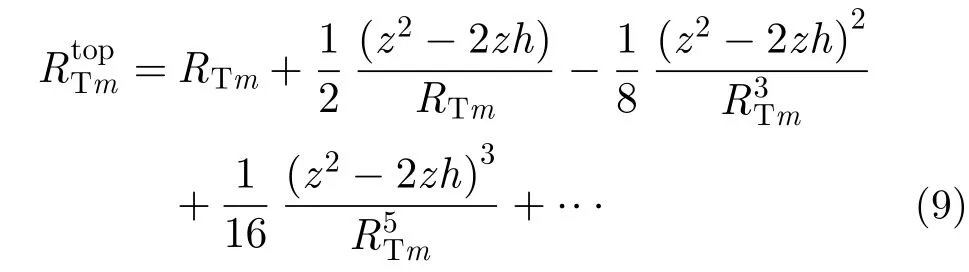
忽略高阶项,保留前两项可得
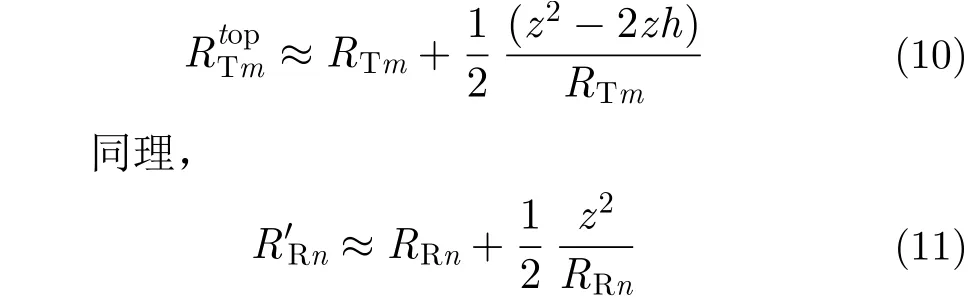
将式(10)和式(11)代入式(6)得式(12)
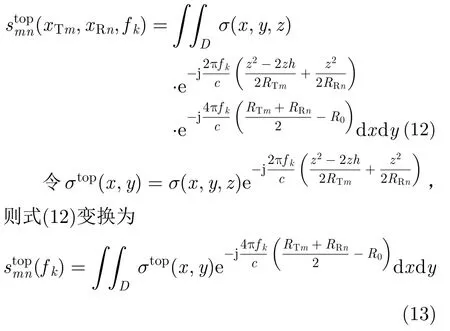
此时,用文献[16]中的2维成像算法进行图像重建,得到2维雷达像,则2维图像在位置处的相位为


对得到的两幅雷达像的相位进行相减,得到两幅图像的干涉相位

将式(14)和式(15)代入式(16),得到干涉相位与散射中心高度之间的关系

3.2 散射中心高程解算分析和3维干涉成像算法
在3.1节建立了散射中心高度与干涉相位之间的关系。然而,式(17)不能直接用于散射中心高度的求解。这主要是因为相位和的值为雷达像相位主值,即取值范围为,而采用式(17)得到的干涉相位的取值范围在之间,因此,需要对干涉相位进行一次解缠,解缠绕过程如式(18):

现对式(17)做进一步分析如下:

因此,当测量距离和雷达波长确定后,根据具体应用中测量目标最大高度范围,确定发射阵元的高度。

当散射中心的高度超过上述范围时,高程会发生折叠。
分析4 关于高程计算精度,理论上主要是由式(9)到式(10)变换过程中忽略的高阶项造成,公式展开式中的分子项和与分母项相比是小量,因此,对高程计算精度的影响有限。但是,针对实际雷达系统,由于制造工艺、系统硬件的非理想性等因素会对高程的计算精度有一定影响。本文所提方法的具体应用为对静态目标进行散射特性诊断测量,实验环境具有一定的可控性,从而保证回波信号有足够高的信杂/噪比,而由系统自身特性造成的高程计算误差,可以通过后续高程测量实验进行校准。
散射中心高程计算流程示于图3, MIMO雷达3维干涉成像处理算法主要步骤如下:
步骤1 获取上部虚拟阵列和下部虚拟阵列采集到的两组回波数据和;
步骤2 采用MIMO阵列自适应校准技术[16]对两组回波数据的幅、相误差进行校准,并完成旁瓣抑制,得到两幅具有大动态范围的雷达像;
步骤3 选择合适的阈值,提取两幅雷达像中的强散射源;
步骤4 对两幅雷达像中的强散射中心进行干涉处理,提取干涉相位,完成高程解算。
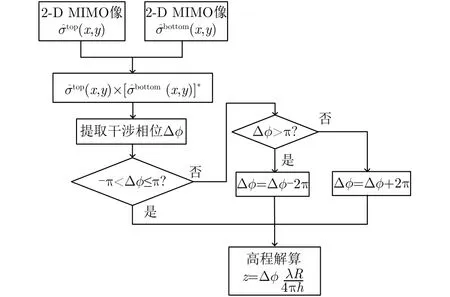
图3 散射中心高程解算流程Fig. 3 Procedure of scatterer altitude calculation
在上述3维干涉成像算法中,步骤3中的阈值选取规则为2维雷达像中最强散射中心的最高旁瓣值,从而保证2D和3D雷达像中的所有散射中心都能准确反映目标体上的散射源,而不受旁瓣影响,进而保证后续目标散射机理分析的正确性。这也从侧面说明了本文所提MIMO雷达3维干涉成像方法可有效用于散射诊断测量的基础是必须能够获取大动态范围的2D雷达像,大动态范围的2D MIMO雷达像的获取方法在文献[16]中得到了解决。
4 实验结果及分析
4.1 数值仿真计算
为验证所提MIMO雷达3维干涉成像技术,利用北京航空航天大学遥感特征实验室开发的电磁散射计算代码POEEC通过数值计算获得某飞机模型的电磁散射数据,POEEC代码综合采用了物理光学法加上等效棱边流法,可计算目标单站和双站散射特性。
目标模型尺寸约为18 m×12 m×4 m(长×宽×高),发射阵列和分别包含4个发射阵元,接收阵列包含20个接收阵元,收发阵元间隔取值参见文献[16]。雷达频率设置为9~11 GHz,步进5 MHz,参考距离,鼻锥向照射。
在取得飞机模型的散射数据后,采用文献[16]中的2维成像算法分别对上下两个虚拟阵列的MIMO雷达数据进行重建,为避免重复,只将上部虚拟阵列的2维成像结果示于图4(a)中,显示视场依据模型大小设定。图4(b)为采用本文所提算法对两幅2维MIMO雷达像中的强散射源进行干涉处理得到的高程图。为进一步验证强散射源高程解算的正确性,结合2维雷达像和高程图将强散射源反投影到目标模型上如图4(c)所示,可以看到强散射中心准确地投影到了目标模型上。这主要是由于数值计算得到回波数据不存在任何误差,高程计算具有较高的计算精度。
4.2 外场实测结果及分析
X波段MIMO雷达原理实验系统如图5所示,工作于时间分集模式,主要构成包括:发射阵列、接收阵列、射频开关矩阵、低噪声放大器、功率放大器、雷达接收机/发射机及控制与信号处理系统。
实验1 (简单点目标的3维成像) 所测量的简单目标为3个直径为10 cm的金属球,测量几何关系如图6(a),图6(b)所示,实测场景图如图6(c)所示。天线高度约为1.8 m,雷达频率9~11 GHz,频率步进2.5 MHz, VV极化,中心距离为17 m。成像测量结果如图7所示,干涉图像中3个金属球的测量高度分别2.68 m, 1.65 m和0.88 m,高程测量值和图6(b)所给高度之间存在误差特别是较低金属球的高度误差达到了0.2 m,这主要是由于实际测量场地不是理想平面,从实测场景图可以看出场地一侧高一侧低,较低金属球所在位置地面偏高。此外,制造工艺、系统硬件的非理想性等因素造成的回波信号相位误差会也会对高程的计算精度有一定影响,可以通过后续高程测量校准实验进一步消除误差,提高精度。
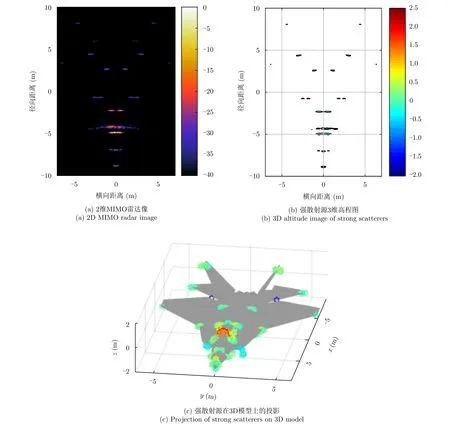
图4 飞机模型MIMO雷达3D干涉成像仿真结果Fig. 4 Simulation results of MIMO radar 3D interferometric imaging for an aircraft model
实验2 (复杂目标的3维干涉成像)为进一步验证所提方法,现对全尺寸飞机模型进行3维干涉成像测量实验,雷达频率设置为9~11 GHz,步进2.5 MHz,中心距离30 m。测量得到的目标2维雷达像和强散射源高程图如图8(a)和图8(b)所示。
通过对2D和3D雷达像与测量目标模型之间的关联比对进行目标散射特性诊断分析。此处只给出3D干涉雷达像在本实验中的应用,例如:散射中心6和散射中心7之间的散射,如果只从2D像上很难对其进行诊断定位,进一步对3D高程图的分析,可以确定该散射的高度在2.5~3.0 m之间,因此,诊断为驾驶舱内部散射。此外,需要强调的是,目标散射特性诊断测量和分析是一项较为复杂的系统工程,对某些特殊散射甚至需要不同角度、不同频段、不同极化的多次测量结果的分析才能给出最终的诊断结果。本实验测量目标的散射诊断也是通过对多种测量条件下实验结果的联合分析最终确定的,这不是本文的重点,为避免赘述,不再阐述实验细节。现将目标部分散射机理列于表1。
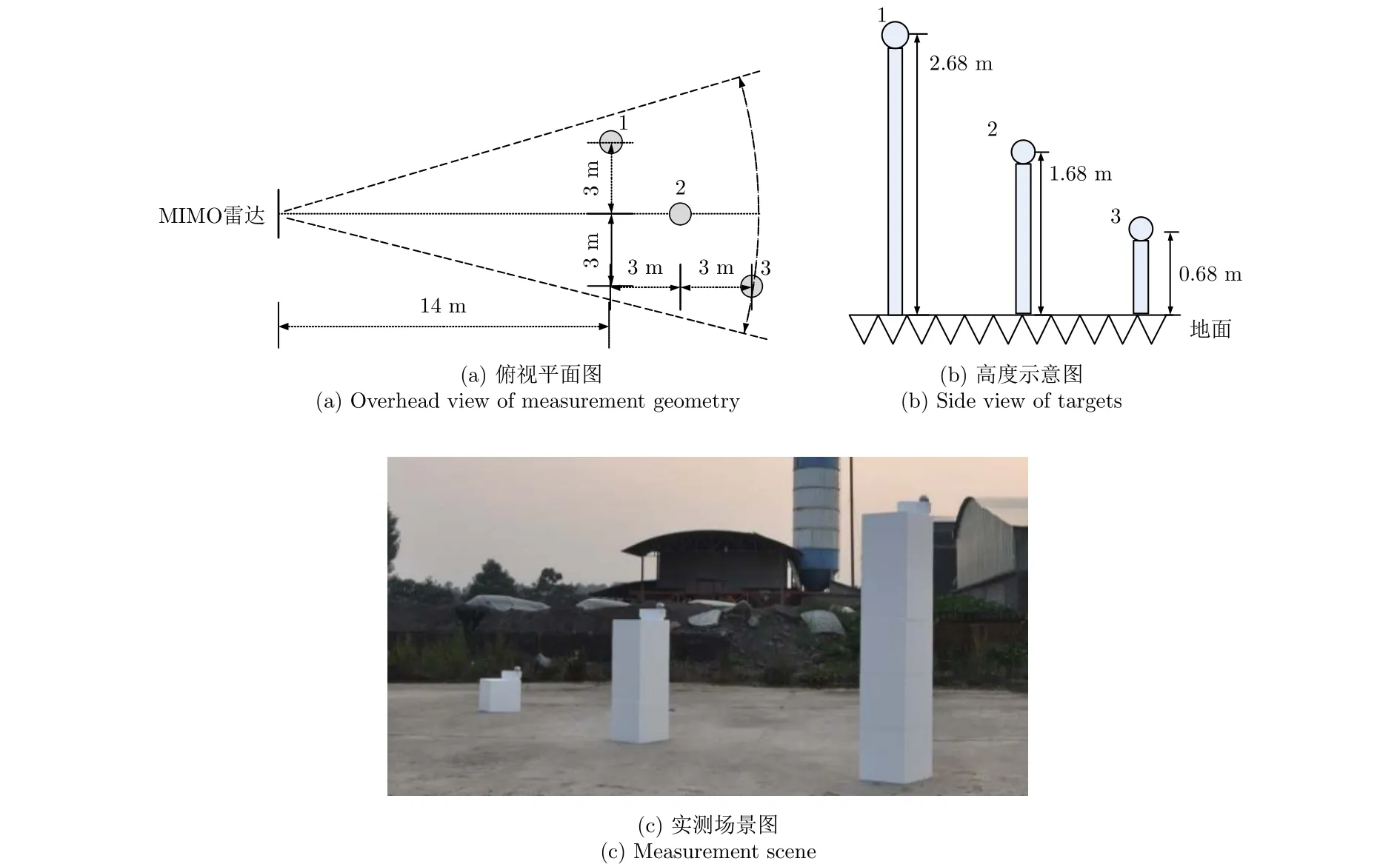
图6 金属球组合体3D干涉成像测量场景Fig. 6 Practical measurement scene of metallic spheres for 3D interferometric imaging
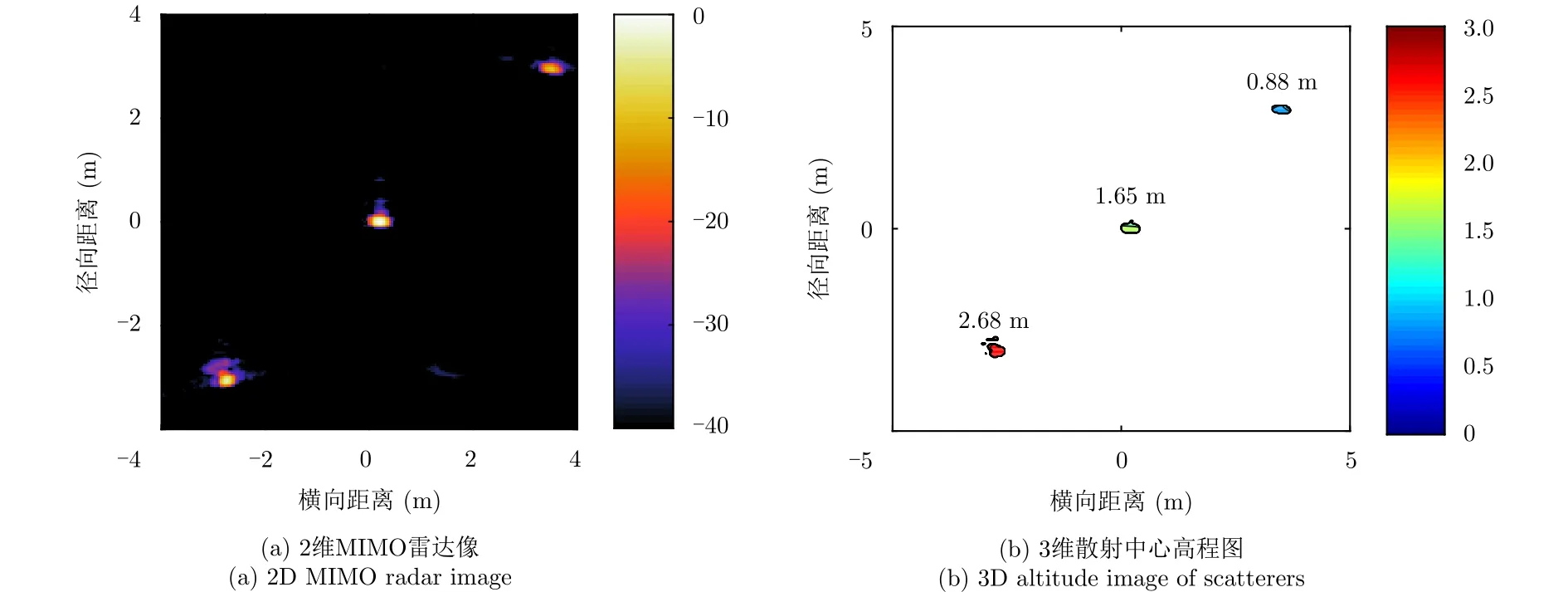
图7 金属球组合体MIMO雷达 3D干涉成像测量结果Fig. 7 Experimental results of MIMO radar 3D interferometric imaging for metallic spheres
金属球组合体和全尺寸飞机模型的实验结果很好地验证了所提MIMO雷达3维干涉成像方法在目标散射机理分析和诊断测量应用中的可行性和有效性。
5 结束语
针对雷达目标电磁散射成像诊断测量,本文提出了一种基于MIMO阵列技术的3维干涉成像方法,可用于复杂目标空间3D散射机理分析和散射诊断测量。通过数值仿真验证了MIMO雷达3维干涉成像算法的正确性,并采用MIMO雷达原理实验系统对金属球组合体和全尺寸飞机模型开展了外场成像测量数据获取实验,成像结果验证了所提出方法的可行性和有效性。与文献[24]所给现有3维干涉诊断成像技术相比,本文所提方法的优势在于:(1)数据采集时间大大缩短,测量效率显著提高;(2)在保证成像质量的同时,最大限度降低雷达系统成本;(3)有效提高目标散射特性诊断分析的正确性。
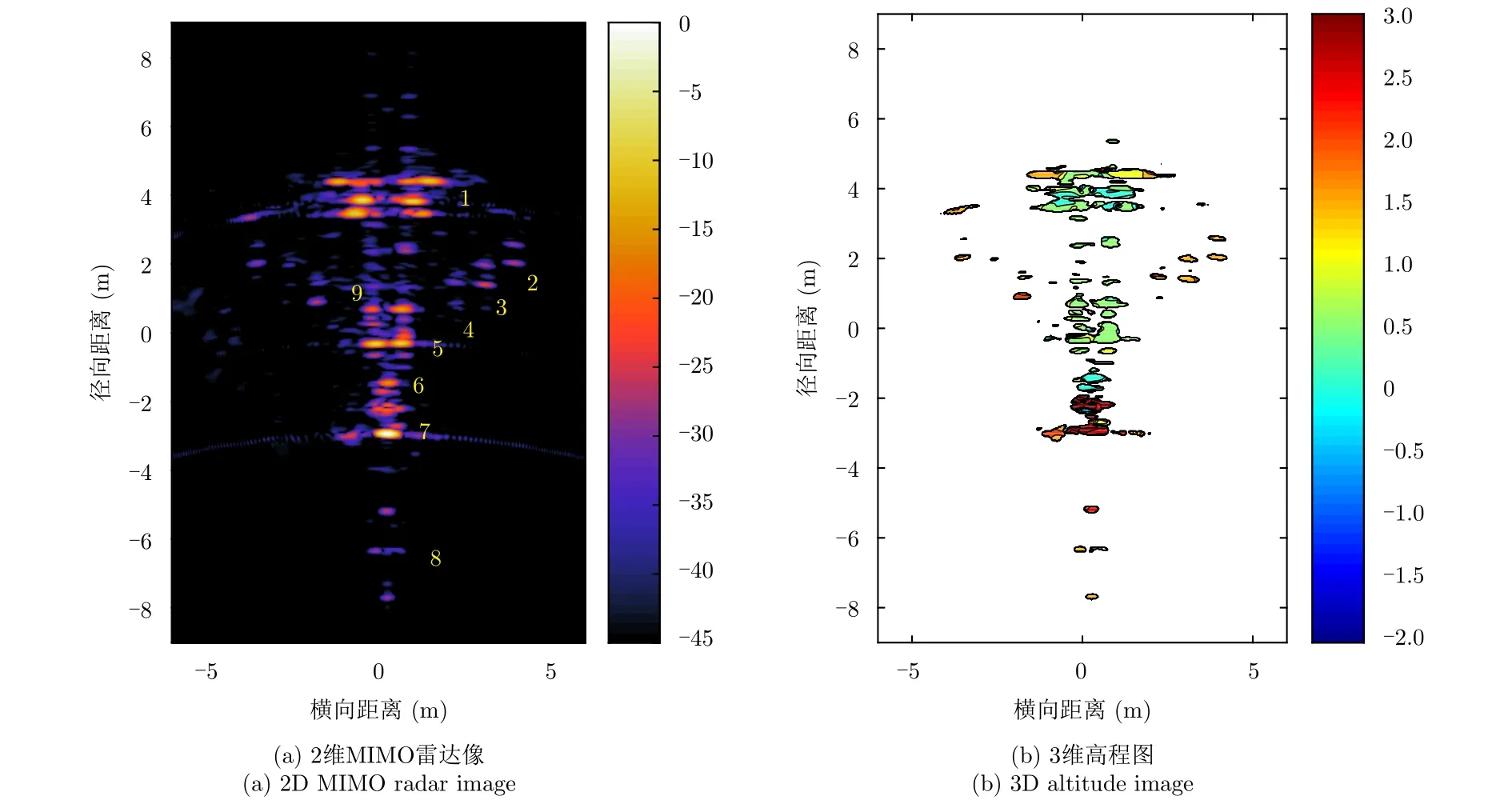
图8 全尺寸飞机模型MIMO雷达3D干涉成像测量结果Fig. 8 Experimental results of MIMO radar 3D interferometric imaging for a full-scale aircraft model
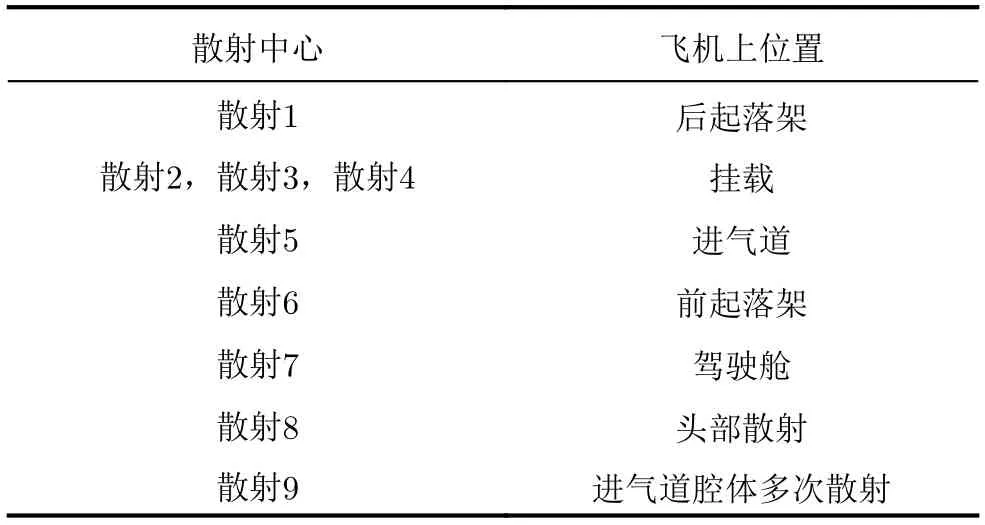
表1 全尺寸飞机模型目标散射机理Tab. 1 Scattering mechanisms of the full-scale aircraft model
猜你喜欢
农业工程学报(2022年10期)2022-08-22
煤炭工程(2022年7期)2022-07-21
军民两用技术与产品(2022年1期)2022-06-01
资源信息与工程(2021年5期)2022-01-15
当代陕西(2020年23期)2021-01-07
舰船电子对抗(2019年5期)2019-12-04
电子制作(2019年15期)2019-08-27
航天电子对抗(2019年4期)2019-06-02
小学生学习指导(低年级)(2018年12期)2018-12-29
中国纤检(2018年8期)2018-09-07
