铁路钢轨异物距离检测方法研究
2018-04-04 02:23:52黄尊地常宁郑声佳梁明辉吴泽钦梁乘玮李特特
铁道科学与工程学报 2018年3期
黄尊地,常宁,郑声佳,梁明辉,吴泽钦,梁乘玮,李特特
(五邑大学 轨道交通学院,广东 江门 529020)
保证铁路运输安全是国家铁路总公司及各路局各项工作的重心。相对于东部地区,西部地区的西藏铁路公司、乌鲁木齐铁路局等铁路现场不安全的影响因素很多,包括大风、风沙、风吹雪等突发情况,造成铁路线路堆积异物,正线旅客列车大面积晚点影响路局正常的运输组织,车辆段内调车作业中断或直接影响行车安全[1−3]。因此,对于铁路钢轨线路上异物入侵及距离计算的检测系统应该是各路局安全检测系统最重要的内容之一。目前基于机器视觉对铁路钢轨线路进行异物入侵检测的主要方法有几类,其中一类是使用固定式摄像机[4−8],这类方法主要将高清摄像机放置到比较容易受异物入侵的铁路线路区段,包括风区重要的铁路线路、人流可能穿越的铁路区段或道岔区段等,采用钢轨特征识别及图像处理算法进行检测并提前报警;还有一类是使用移动式摄像机[9−15],这类方法现在得到越来越多的应用,可以实时将异物入侵信息反馈到列车上,通过截取一帧一帧的实时视频图片处理算法分析前方异物位置及进行列车里程累计等工作。上述研究内容主要应用在正线上,对车辆段或存车场内列车实时运行的前方异物距离判断及算法研究偏少。针对目前特殊区域监控系统的不足,本文开展铁路线路实时异物距离测试方案设计,基于车钩装载移动式摄像机和钢轨识别方法[12,16],利用横向视觉和纵向视觉几何原理提出2种钢轨异物距离检测方法,为铁路运输安全提供技术方案。
1 铁路钢轨异物距离测试方案
整体测试方案中包含摄像机、灯光、无线传输等硬件设备,视频存储、照片获取、照片读入等程序操作,以及灰度处理、平滑处理、边缘检测、直线检测、钢轨方程、异物检测和距离检测等算法操作。摄像机等设备放置在车钩前段,镜头与轨面平行,在钢轨中心线上方;软件处理设备放置在后端机车司机室内。铁路钢轨异物及距离测试具体方案如图1所示。

图1 测试方案Fig. 1 Test plan
2 铁路钢轨识别算法
2.1 钢轨识别算法
铁路钢轨识别中,首先对照片进行预处理;并根据其像素特征进行二值化,即将图片信息参数平面量化;其次进行边缘细化,对于每一个边缘点,以其梯度方向为中心,设置一小区间及相应计算步长,对每个区间中的θ量化值计算相应的ρ值,这些点对应的参数空间的坐标即是所检测直线的参数;最后边缘跟踪,形成一个连贯的、对应于一个物体边界或景物实体之间有意义的边界,即完成霍夫变换算法识别出钢轨方程(见图2)。具体公式推导过程如下。

图2 霍夫变换原理图Fig. 2 Hough transform principle diagram

铁路钢轨的特征比较明显,一是2条钢轨是不间断的2条平行直线,其间隔距离保持不变;二是钢轨与车轮的摩擦原因造成部分钢轨表明亮度很大,但同时有很多铁路线,尤其是存车场线路钢轨亮度不大;三是钢轨与周围轨枕、扣件和道床的组成结构及色差还是存在较大差别,这些特征对于钢轨在图片中的识别有较大影响。结合式(2)~(3),根据霍夫变换统计直线方程规律及极值判断,最终得到钢轨在图片中的直线方程。
2.2 钢轨识别算法验证
为了验证钢轨识别算法的检测效果,在实验室的钢轨直线段进行了试验验证,见图3所示。图3(a)为经过二值化处理和霍夫变换后得到的直线识别情况,计算结果得到钢轨上一系列点的坐标;图3(b)为两端坐标拟合的直线方程反馈到真实图片上,验证其与钢轨的匹配程度,结果表明匹配较好。
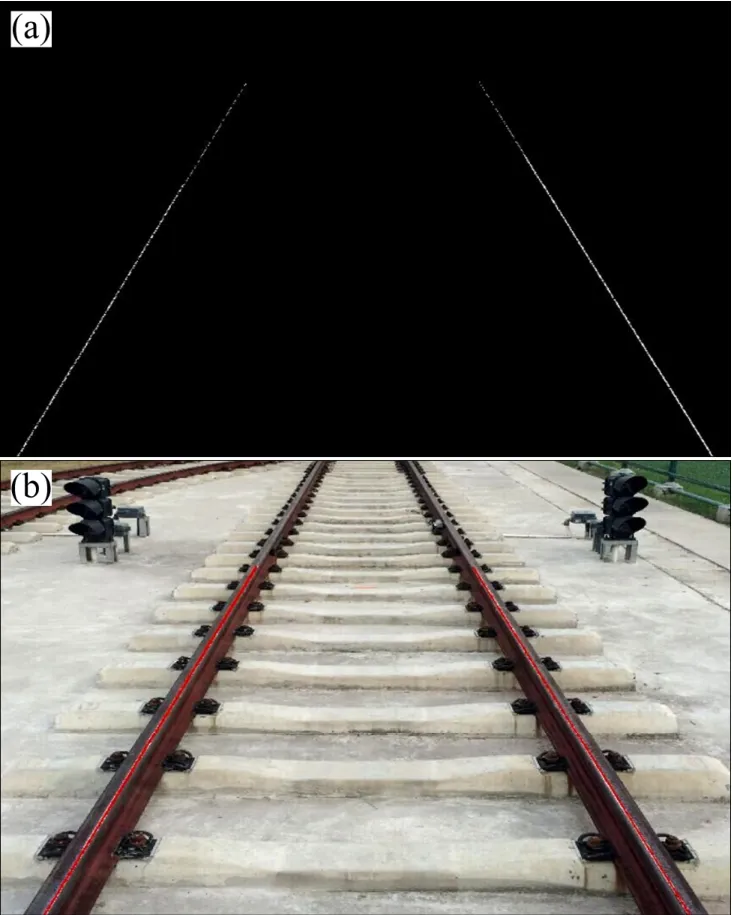
图3 验证结果Fig. 3 Verification results
其中钢轨识别的直线方程分别为:


3 铁路钢轨异物距离识别算法
3.1 基于横向视觉的钢轨异物距离检测方法
基于横向视觉的钢轨异物距离检测方法如图 4所示,在实物示意图中,O为摄像机的位置,OP为摄像机横向视角的中心线,CG和DH为左右两侧的钢轨,与中心线等距对称布置;C和D 2点为初次进入摄像机镜头里的钢轨点,CD段到摄像机的距离为l0;M点为异物在钢轨上的位置,MN段到摄像机的距离为l1;AB段为远处进入摄像机的范围。在以实物为原型的照片示意图中,照片像素为b*p,如果去掉天空部分,只保留钢轨部分,照片像素为b*p/2,其中CD段横向像素差值为b0,MN段横向像素差值为b1,两端纵向像素差值为p1。

图4 横向视觉检测原理图Fig. 4 Lateral visual inspection principle
由图4(a)可知,根据相似三角形的原理,可以得到异物点到摄像机的距离与横向视觉范围的比例关系,如下:

其中:l0已知,欲求l1,必须计算出CD段和EF段的实物长度之比。
2钢轨CG和DH横向间距为1 435 mm,且在直线段间距保持不变。在图4(b)照片示意图中,由于相机视角和像素的关系,2段平行线变成了斜率不同的斜线,其横向像素差值不同。由此可知:

由式(6)和式(8)可得

图像处理后,通过钢轨方程及异物点横坐标识别,进行异物检测及距离计算。
3.2 基于纵向视觉的钢轨异物距离检测方法
基于纵向视觉的钢轨异物距离检测方法如图 5所示,在实物示意图中,O点为摄像机的位置,高度为h,焦距为s;P点为图像成像侧,R和Q分别为初次进入摄像机镜头里的钢轨位置和异物所在钢轨位置的中心点,到摄像机的距离分别为l0和l1,与轨面的夹角分别为a1和a2;R和Q成像点距轨面的距离分别为p2和p3。在以实物为原型的照片示意图中,照片像素为 b*p,如果去掉天空部分,只保留钢轨部分,照片像素为b*p/2,其中CD段横向像素差值为b0,MN段横向像素差值为b1,两端纵向像素差值为p1。

图5 纵向视觉检测原理图Fig. 5 Longitudinal visual inspection principle
由图5(a)可知,根据R和Q分别所在的2个直角三角形相似,可以得出到摄像机距离与摄像机参数的比例关系,如下所示:

由式(10)~(11)计算可得:

其中:Δb表示异物点到标定初始点的距离在屏幕上的成像。
由图5(b)中的图片示意图可知,照片中的像素和摄像机成像存在一定的关系,如下所示:

由式(12)和(13)可得:

图像处理后,通过钢轨方程及异物点纵坐标识别,进行异物检测及距离计算。
4 实验室线路试验及结果分析
五邑大学轨道交通学院可移动列车综合实验室,包括一台10 m地铁列车、120 m长度的铁路线路,接触网、变电所等供电设备以及运营管理和信号控制室等。为整体方案测试和异物距离检测提供了可行性条件。
由图6(a)可以看出,线路两端是站台,其中照片中远处站台停放地铁列车;正线120 m长,经过道岔左边是侧线,中间很长一段距离都是直线,便于开展测距试验。在钢轨附近,放置卷尺标注尺寸,象征性的异物放置在钢轨上,距离摄像机的位置分别为7,12,18,25和45 m。

图6 实验室测试图Fig. 6 Test in the laboratory
软件处理和算法检测后的情况如图6(b)所示,算法识别的钢轨方程划线与图片中钢轨完全吻合,限界方程划线在轨道线路两侧,同时,象征性异物已被识别出,计算结果见表1所示。

表1 测距算法实验室检测结果Table 1 Detection results of distance algorithm in the laboratory
由表1数据可知,在45 m范围内,2种测距算法都保持较高的精度要求,误差在5%以内。同时,在测试数据误差整体分析中,尤其对于中长距离,基于横向视觉的钢轨异物距离检测方法比基于纵向视觉的钢轨异物距离检测方法要更加准确一些。
5 铁路现场试验及结果分析
为了保证整个测试方案的可行性和检测算法的准确性,进行铁路现场的验证试验。铁路现场选择在乌鲁木齐铁路局乌西货车存车场进行,存车场要进行长编组列车的调车作业,车尾需要工作人员辅助查看线路及铁路异物,为方案开展提供了必要性。具体测试现场如图7(a)所示。现场有很多条货运股道,选择中间的一条线路,摄像机放置在车钩位置,同时在钢轨中间标注尺寸,以及放置象征性的异物,模拟实际列车运行时前方的异物情况。

图7 铁路现场测试图Fig. 7 Test in the railway scene
软件处理和算法检测后的情况如图7(b)所示,算法识别的钢轨方程划线与图片中钢轨完全吻合,限界方程划线在轨道线路两侧,同时,象征性异物已被识别出,计算结果见表2所示。

表2 测距算法铁路现场检测结果Table 2 Detection results of distance algorithm in the railway scene
由表2数据可知,在40 m的范围内,2种测距算法都保持较高的精度要求,由于现场的环境较实验室更为复杂,个别尺寸误差在 6%左右。同时,在全部测试数据误差分析中,尤其是中长距离,基于横向视觉的钢轨异物距离检测方法比基于纵向视觉的钢轨异物距离检测方法要更加准确。
6 结论
1) 基于铁路钢轨的特征,通过灰度处理、平滑处理、二值化处理、边缘检测以及霍夫变换直线检测等算法,可以准确地识别钢轨方程并匹配图像文件。
2) 结合机器视觉和铁路钢轨特征,分别提出基于横向视觉和纵向视觉的钢轨异物距离检测方法;通过试验数据误差分析,算法具有较好的鲁棒性,尤其是中长距离,基于横向视觉比纵向视觉的检测方法要更加准确一些,适合监控远程异物。
3) 整体方案经过实验室测试以及乌鲁木齐铁路局现场试验验证,异物距离测试精度满足工程要求,为铁路运输现场作业安全提供理论依据和技术方案。
参考文献:
[1] Maneesha S, Sameer S, Jay J, et al. Autonomous rail track inspection using vision based system [C]// IEEE International Conference on Computational Intelligence for Homeland Security and Personal Safety. Alexandria,USA, 2006: 56−59.
[2] Bogdan S, Andrzej C. Fast detection and impulsive noise removal in color images[J]. Real Time Imaging, 2005,11(5/6): 389−402.
[3] Davey J, Wallace A, Stenson N, et al. The experiences and perceptions of heavy vehicle drivers and train drivers of dangers at railway level crossings[J]. Accident Analysis and Prevention, 2008, 40(2): 1217−1222.
[4] JUN Xue, JUN Cheng, LI Wang, et al. Visual monitoring based railway grade crossing surveillance system[C]//Congress on Image and Signal Processing, Hainan, China,2008: 427−431.
[5] 习可. 基于智能视频技术的铁路入侵检测[D]. 长沙:中南大学, 2010.XI Ke. Railway intrusion detection based on intelligent video technology[D]. Changsha: Central South University,2010.
[6] 李家才,陈治亚,王梦格. 铁路入侵运动目标实时检测技术[J]. 铁道科学与工程学报,2013, 10(6): 116−120.LI Jiacai, CHEN Zhiya, WANG Mengge. Moving target real-time detection of railway intrusion[J]. Journal of Railway Science and Engineering, 2013, 10(6): 116−120.
[7] 王前选, 梁习锋, 刘应龙, 等. 铁路钢轨视觉识别检测方法[J]. 中南大学学报(自然科学版), 2014, 45(7):2496−2502.WANG Qianxuan, LIANG Xifeng, LIU Yinglong, et al.Railway rail identification detection method using machine vision[J]. Journal of Central South University(Science and Technology), 2014, 45(7): 2496−2502.
[8] 王前选, 梁习锋, 刘应龙, 等. 缓变异物入侵铁路线路视觉检测方法[J]. 中国铁道科学, 2014, 35(3): 137−143.WANG Qianxuan, LIANG Xifeng, LIU Yinglong, et al.Visual detection method for the invasion of slowly changing foreign matters to railway lines[J]. China Railway Science, 2014, 35(3): 137−143.
[9] Susumu K, Tsuyoshi N, Yasukazu O. A global optimization algorithm for real-time onboard stereo obstacle detection systems[C]// Proceedings of the 2007 IEEE Intelligent Vehicles Symposium Istanbul. Turkey,2007: 13−15.
[10] Sadayuki T. Vision-based vehicles in Japan: Machine vision systems and driving control systems[J]. IEEE Transactions on Industrial Electronics, 1994, 41(4): 398−405.
[11] Fatih K, Yusuf S A. Vision-based railroad track extraction using dynamic programming[C]// Proceedings of the 12th InternationalIEEEConference onIntelligent Transpertation Systems, St Louis, Mo, USA, 2009: 42−47.
[12] 郭保青, 许西宁, 余祖俊. 单幅轨距图像中轨道特征识别与定位方法研究[J]. 电子测量与仪器学报, 2011,25(4): 309−314.GUO Baoqing, XU Xining, YU Zujun. Research on recognition and positioning method of rail landmark in single image[J].Journal of Electronic Measurement and Instrument, 2011, 25(4): 309−314.
[13] 郭保青, 朱力强, 史红梅, 等. 基于单幅图像的轨检车位置矫正方法研究[J]. 铁道学报, 2011, 33(12): 72−77.GUO Baoqing, ZHU Liqiang, SHI Hongmei, et al.Research on track inspection car position correction method by use of single imge[J]. Journal of the China Railway Society, 2011, 33(12): 72−77.
[14] 同磊. 基于机器视觉的轨道交通线路异物检测技术研究[D]. 北京: 北京交通大学机械与电子控制工程学院,2012: 23−40.TONG Lei. A study on railway obstacle detection using machine vision[D]. Beijing: Beijing Jiaotong University,School ofMechanicalElectronic andControl Engineering, 2012: 23−40.
[15] 同磊, 朱力强, 余祖俊, 等. 基于车载前视检测相机的轨道异物检测[J]. 交通运输系统工程与信息, 2012,12(4): 79−84.TONG Lei, ZHU Liqiang, YU Zujun, et al. Railway obstacle detection using onboard forward-viewing camera[J].Journal ofTransportationSystems Engineering and Information Technology, 2012, 12(4):79−84.
[16] 闵永智, 殷超, 党建武, 等. 基于图像色相值突变特征的钢轨区域快速识别方法[J]. 交通运输工程学报,2016, 16(1): 46−54.MIN Yongzhi, YIN Chao, DANG Jianwu, et al. Fast recognition method of rail region based on hue value mutation feature of image[J]. Journal of Traffic and Transportation Engineering, 2016, 16(1): 46−54.
猜你喜欢
中老年保健(2021年9期)2021-08-24 03:49:56
昆明医科大学学报(2020年12期)2021-01-26 00:43:52
兽医导刊(2019年1期)2019-02-21 01:14:26
制造技术与机床(2017年8期)2017-11-27 02:10:22
中国公共安全(2017年8期)2017-10-13 08:12:17
中国公共安全(2017年11期)2017-02-06 05:27:47
办公自动化(2016年18期)2016-12-17 19:32:18
中国铁道科学(2015年5期)2015-06-21 06:53:20
中国铁道科学(2015年4期)2015-06-21 06:46:04
新闻前哨(2015年2期)2015-03-11 19:29:25