非奇异快速终端二阶滑模有限时间制导律
2018-04-03 03:47雷虎民叶继坤王华吉
系统工程与电子技术 2018年4期
李 炯, 张 涛, 雷虎民, 叶继坤, 王华吉
(空军工程大学防空反导学院, 陕西 西安 710051)
0 引 言
近年来,弹道导弹和高超声速飞行器等高速目标不断涌现,给各国的防空反导系统带来了严峻的挑战。拦截高速目标时,导弹的末制导时间只限于几秒,为了实现对目标直接碰撞杀伤,需要使弹目视线(line of sight, LOS)角速率在有限时间内收敛到零附近的较小邻域内,从而使导弹以准平行接近状态杀伤目标[1]。实际应用中,寻的导弹的自动驾驶仪特性通常会使制导精度变差,尤其是对机动目标。因此,研究考虑自动驾驶仪动态特性的有限时间收敛制导律具有重要的意义。
文献[2-4]针对传统基于有限时间Lyapunov稳定性理论获得的导引规律只能保证当时间趋于无穷时视线角速率收敛到零的问题,基于非线性控制有限时间稳定理论,设计了简洁的有限时间收敛变结构导引规律,并提出了制导系统有限时间收敛的充分条件,但收敛速度较慢。文献[5-7]针对制导律设计时选择线性滑模面,跟踪误差收敛时间较长的问题。采用Terminal滑模控制策略,在滑模面中引入非线性函数,提高了收敛速度,但造成了系统的奇异问题。文献[7-8]针对上述问题,基于非线性终端控制理论设计了非奇异终端滑模制导律,解决了奇异问题,但将目标机动设为干扰因素,只适用于静止目标或弱机动目标,不适用于目标做大机动场景,而且未知扰动会造成系统强烈的抖振。文献[9-10]设计了非线性干扰观测器来估计目标机动,但需要目标机动的上界,这通常无法获得,且对噪声敏感。文献[11]考虑了测量噪声的干扰,设计了扩张观测器对不确定项进行估计和补偿,虽不需要任何先验信息,但并未证明估计误差能在有限时间收敛。
LOS角是制导律设计的关键参数,通常通过导引头测量获取,但在测量过程中存在噪声干扰,且其微分量通常无法获得。近年来,跟踪微分器(tracking differentiator, TD)被广泛采用解决上述问题[12-18]。TD的基本概念最先由我国韩京清研究员提出,并给出了3种具体的TD[19],但其跟踪和微分效果并不理想,国内外学者对TD的设计方法进行了深入研究,已提出多种形式的TD[15-16]。文献[16]提出了混合微分器,即在设计微分器时,同时引入线性环节和非线性环节,非线性环节确保了微分器收敛的快速性,线性环节则有效避免了输出颤振,但是形式过于复杂,参数镇定困难,不利于工程应用。文献[17]设计了反正切形式的新型跟踪微分器,但是设计参数过多,且噪声抑制能力不强。
针对上述问题,首先建立了包含导弹自动驾驶仪动态特性的非线性弹目运动模型;针对普通快速终端滑模控制产生的奇异问题和抖振问题,设计了非奇异快速终端二阶滑模制导律(nonsingular fast terminal second-order sliding mode guidance law,NFTG),并对其稳定性和有限时间收敛特性进行了严格证明,给出了收敛时间的具体表达式;随后设计了新型有限时间收敛微分器(finite-time-convergent differentiator, FD),用于抑制LOS角速率测量误差和估计其一阶微分量,并将其应用到扩张观测器当中,用来对不确定项进行估计;最后通过数字仿真对所设计的制导律进行了仿真验证。
1 导弹-目标相对运动描述模型
导弹与目标的相对运动如图1所示。

图1 导弹目标三维拦截几何关系图
其中OxIyIzI为惯性坐标系,OxLyLzL为视线坐标系,r为导弹和目标的相对距离,qε和qβ分别为视线倾角和视线偏角,θm、θt、φm和φt分别为导弹和目标的弹道倾角和弹道偏角。为便于制导律研究,可将末制导过程解耦成纵向平面和侧向平面运动分别进行研究,本文主要针对导弹纵向平面展开研究。
假设在充分短的时间Δt内,xi、yi、zi、qε的增量分别为Δxi、Δyi、Δzi、Δqε,那么
(1)
若Δt充分小,则Δqε(t)为一个充分小的量,因此式(1)可化简为
(2)
对式(2)两端进行二次求导并化简,可得
(3)

将导弹自动驾驶仪视作一阶惯性环节,则
(4)
式中,τ为导弹自动驾驶仪时间常数;amy为获得的导弹加速度;u(t)为提供给导弹自动驾驶仪的制导指令加速度。

(5)
由式(5)可得
(6)

(7)
对式(5)两端进行微分,可得
(8)
结合式(4)、式(6)、式(8),化简可得
(9)
考虑导弹自动驾驶仪延迟的弹目相对运动学模型可表示为

(10)

2 非奇异快速终端二阶滑模有限时间收敛制导律设计
2.1 制导律设计
选取非奇异快速终端滑模面设计为
(11)
式中,α>0;β>0;p和q为正的奇数,且1
(12)
设计二阶滑模制导律为
(13)
式中,k1>0,k2>0,λ>2为制导律设计的参数;由于λ>2, |s|1-1/λsgn(s)和|s|1-2/λsgn(s)均为非光滑的连续函数,因此制导律是连续控制信号,进而可以大幅度地削弱滑模控制的高频抖振,有利于实际的工程应用。

2.2 稳定性分析
将式(13)代入式(12)中可得
(14)
定义以下
w1=s
(15)
则
(16)
考虑Lyapunov函数,即
(17)
V正定,则
(w2-k1|w1|1-1/λsgn(w1))+
(2w2-k1|w1|(λ-1)/λsgn(w1))
(-k2|s|1-2/λsgn(w1))-
(18)
将式(18)写成如下矩阵形式
(19)
其中,w=[|w1|1-1/λsgn(w1),w2]T

2.3 有限时间收敛特性证明

(1)V是正定函数;
(2) 存在一个实数c>0、κ∈(0,1)和原点开邻域V⊆D,满足
(20)
则原点是系统的有限时间的稳定平衡点,且
(21)
证明将式(17)写成如下矩阵形式,即
V=wTPw
(22)
其中
由于k2>0、λ>2,易验证矩阵P正定且函数V径向无界,即
ρmin(P)‖w‖2≤V≤ρmax(P)‖w‖2
(23)
其中,ρmin(·)和ρmax(·)分别表示矩阵(·)的最小和最大特征值,‖·‖表示矩阵(·)的欧几里得范数。

-ρmin(Q)‖w‖(2λ-3)/(λ-1)≤-ρmin(Q)V(2λ-3)/(λ-1)
(24)
即
(25)
式中,c=ρmin,κ=(2λ-3)/(λ-1)
其收敛时间为
(26)
故s可在有限时间tr内收敛到零。下面证明当t=tr、s(tr)=0、x2(tr)≠0时,x2可在有限时间ts内收敛到零。
取Lyapunov函数为
(27)
对式(27)进行微分,可得
(28)
由于当t≥tr时,s(tr)=0,故

化简可得

化简可得

(29)
由1
根据引理1,易知x2可达到有限时间收敛,其收敛时间为
(30)
证毕
3 有限时间收敛微分器ESO设计
3.1 有限时间收敛微分器FD设计
对于如下系统
(31)
式中,x1,x2,…,xn∈R为状态变量;fA(·)为连续函数且f(0,…,0)=0。
参考文献[14]可得如下新型FD
(32)
式中,ζ1,ζ2,…,ζn为系统状态变量;υ(t)为带有噪声的输入信号;ζ1为去除噪声后的跟踪信号;ζi为υ(t)的第i-1阶导数的估计值,i=2,3,…,n。R、χi(i=1,2,…,n)∈R+为待设计参数。则存在φ>0与ιφ>n使得
(33)
式中,O((1/R)ιφ-i+1)表示ζi与υ(i-1)(t)的近似程度是(1/R)ιφ-i+1阶的,φ=(1-ϑ)/ϑ,ϑ∈(0,min{ι/(ι+n),1/2}),n≥2。估计误差为(1/R)ιφ-i+1的高阶无穷小。
通过选取足够大的设计参数R,估计误差可以任意小。误差有限时间收敛特性具体证明见文献[18]。
3.2 基于FD的扩张观测器设计

(34)

(35)

根据式(31)、式(32)及式(34),可得扩张后的系统为
(36)
根据扩张观测器(extended state observer,ESO)的设计原理可知,系统基于FD的ESO(ESO based on FD, FESO)为
(37)
式中,e为系统状态量的观测误差;zi为FESO对系统状态的观测值,βi1、βi2、βi3、βi4为观测增益;非线性函数fal(ei,αi,δi)是FESO的核心部分,它是连续非光滑的,对模型不确定性及外界干扰具有较强的适应性,其表达式为
(38)
式中,αi=1/2n-1,δi=h,n为FESO的阶数,h为积分步长。由于FESO所涉及的参数较多,对其进行稳定性分析难度较大,为保证观测误差趋近于零,文献[19-21]中扩张观测器参数大致取值为βi1=4ω、βi2=6ω2、βi3=4ω3、βi4=ω4。不确定项估计值可用atr⊥=r·z4(t)求出,从而达到对制导律进行有效补偿的目的。
根据式(13),基于跟踪微分滤波器ESO的有限时间收敛制导律表达式为
(39)

3.3 FESO估计结果
测量噪声为均值为零、方差为1.7×10-4的高斯白噪声,FESO的参数取值为R=60、χ1=15、χ2=1、h0=0.01 ms、δ=0.01、β01=100、β02=150、β03=300、β04=2 000、α1=0.9、α2=0.8、α3=0.7。仿真结果如图2和图3所示。
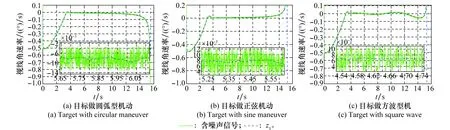
图2 视线角速率滤波曲线 Fig2 LOS angular rate filtering curve

图3 不确定项估计曲线 Fig3 Uncertainty estimates curve
由图(2)可知,有限时间收敛微分具有良好的视线角滤波特性。图(3)中的部分不确定性真值为Cf,虽然不能代表完全的不确定性,但在一定程度上可以看出不确定估计值与真值的关系,该值虽小,但它是控制量的分子,若与1/B1相乘,将会有很大程度增大。因此,基于有限时间收敛的微分滤波器FESO的有限时间具有良好的视线角速率滤波特性及不确定性补偿能力。
4 仿真分析


图4 弹目相对运动道曲线 Fig4 Target-missle trajectory curve
由图4可知,无论目标做哪种类型的机动,NFTG弹道相比于SMG、FTCG和文献[6]中的弹道,在初始阶段较为弯曲,但末端比较平直,这主要是因为NFTG使角速率在有限时间内收敛到零附近的邻域的速度最快。弹目视线角速率曲线如图5所示。导弹过载曲线如图6所示。

图5 LOS角速率曲线 Fig5 The LOS angular rate curve

图6 导弹过载曲线
由图6可知,NFTG和FTCG在视线角速率未达到有限时间收敛之前,相比于SMG导弹的过载比较大,但当视线角速率达到有限时间收敛之后,NFTG和FTCG的过载明显比SMG小,且由于NFTG收敛速度比FTCG更快,过载更小。从能量分配的角度解释,为使导弹的某些状态,如视线角速率,在末制导初期便达到有限时间收敛,必然需要更大的过载,消耗更多的能量,但是一旦视线角速率达到有限时间收敛状态,控制量便会降低为很小值,这样可使导弹在末制导初期充分利用机动能力和能量,而在末端保证导弹的过载比较小,这无疑会提高导弹的制导精度和作战性能,另外由于本文采取了二阶滑模控制方法,相比于另外几种方法,其过载抖振明显减小,具有重要的工程应用价值。由表1可直观看到3种制导律具体的视线角速率收敛时间和平均脱靶量,无论导弹做什么样的机动,FTCG和NFTG均能保证直接碰撞杀伤,而SMG面对方波机动和正弦机动出现了脱靶。

表1 蒙特卡罗仿真分析
5 结 论
针对高速机动目标拦截问题,基于终端滑模控制理论和二阶滑模控制理论,设计了零化视线角速率的非奇异快速终端二阶滑模制导律,并严格证明了系统的稳定性和有限时间收敛特性;为抑制测量噪声和估计弹目视线角速率,设计了新型有限时间收敛微分器,将其与扩张观测器结合来估计不确定项。仿真结果表明:所设计的微分器收敛速度快,估计精度高,且具有较强的抗干扰能力,目标做不同类型机动的情况下,所设计的制导律均能保证视线角速率在有限时间收敛,达到准平行接近,且末端需用过载小,可实现直接碰撞杀伤。
参考文献:
[1] 丁世宏, 李世华. 有限时间控制问题综述[J].控制与决策, 2011, 26(2):161-169.
DING S H, LI S H. A survey for finite-time control problems[J].Control and Decision,2011, 26(2):161-169.
[2] SUN S, ZHOU D, HOU W T. A guidance law with finite time convergence accounting for autopilot lag[J]. Aerospace Science and Technology, 2013, 35(25): 132-137.
[3] ZHOU D, SUN S. Guidance laws with finite time convergence[J].Journal of Guidance,Control,and Dynamics,2009,32(6):1838-1846.
[4] SUN L H, WANG W H, YI R. A novel guidance law using fast terminal sliding mode control with impact angle constraints[J]. ISA Transaction, 2016,64(2):12-23.
[5] SONG J, SONG S, GUO Y, et al. Nonlinear disturbance observer-based fast Terminal sliding mode guidance law with impact angle constraints[J].International Journal of Innovative Computing, Information and Control, 2015,11(3):787-802.
[6] 朱战霞, 韩沛, 陈鹏. 基于非线性终端滑模的动能拦截器末制导律设计[J]. 西北工业大学学报, 2013, 31(2): 233-238.
ZHU Z X,HAN P,CHEN P. Design of nonlinear terminal SMGL(sliding-mode guidance law) for KKV (kinetic kill vehicle)[J]. Journal of Northwestern Polytechnical University,2013,31(2):233-238.
[7] SONG J H, SONG M S, ZHOU H B. Adaptive nonsingular fast terminal sliding mode guidance law with impact angle constraints[J]. International Journal of Control, Automation and Systems, 2016, 14(2):99-114.
[8] 张旭,雷虎民,李炯.非奇异快速终端滑模有限时间收敛制导律[J].固体火箭技术,2016,39(2):281-286.
ZHANG X, LEI H M, LI J. Nonsingular fast terminal sliding mode guidance law with finite-time convergence[J]. Journal of Solid Rocket Technology, 2016,39(2): 281-286.
[9] HE S M, WANG J, LIN D F. Composite guidance laws using higher order sliding mode differentiator and disturbance observer[J]. Journal of Aerospace Engineering, 2015, 229(13), 2397-2415.
[10] HE S M, LIN D F. Robust terminal angle constraint guidance law with autopilot lag for intercepting maneuvering targets[J]. Nonlinear Dynamic, 2015, 81(1/2):881-892.
[11] 王华吉,简金蕾,雷虎民. 带扩张观测器的新型滑模导引律[J].固体火箭技术,2015,38(5):622-627.
WANG H J, JIAN J L, LEI H M. A new sliding mode guidance law based on extended state observer[J]. Journal of National University of Defense Technology,2015,38(5):622-627.
[12] ZHAO B, ZHOU J. Smooth adaptive finite time guidance law with impact angle constraints[J]. International Journal of Aerospace Engineering, 2016,2016(4):1-19.
[13] 张旭,雷虎民,李炯. 变论域模糊自适应滑模有限时间收敛制导律[J].国防科技大学学报,2015,37(2):149-155.
ZHANG X, LEI H M, LI J. Variable universe fuzzy adaptive sliding mode guidance law with finite time convergence[J].Journal of National University of Defense Technology, 2015, 37(2):149-155.
[14] WANG X H, CHEN Z Q, YANG G. Finite-time-convergent differentiator based on singular perturbation technique[J]. IEEE Trans.on Automatic Control, 2007, 52(9): 1731-1737.
[15] BU X W, WU X Y, ZHANG R, et al. Tracking differentiator design for the robust backstepping control of a flexible air-breathing hypersonic vehicle[J]. Journal of the Franklin Institute, 2015, 352(4): 1739-1765.
[16] ZHANG L,ZHANG Z, HUANG L. Hybrid non-linear diffe-rentiator design for a permanent-electro magnetic suspension maglev system[J]. IET Signal Process, 2012,6(6):559-567
[17] 卜祥伟,吴晓燕,马震.改进的反正切跟踪微分器设计[J].上海交通大学学报, 2015, 49(2): 164-168.
BU X W, WU X Y, MA Z, et al. Design of a modified arctangent-based tracking differentiator[J]. Journal of Shanghai Jiaotong University, 2015, 49(2): 164-168.
[18] WANG X H, CHEN Z Q, YANG G. Finite-time-convergent differentiator based on singular perturbation technique[J]. IEEE Trans.on Automatic Control, 2007,52(9):1731-1737.
[19] 韩京清.自抗扰控制技术[M].北京:国防工业出版社,2008.
HAN J Q. Active disturbance rejection control technique[M]. Beijing: National Defence Industry Press, 2008.
[20] 雷虎民.导弹制导与控制原理[M].北京:国防工业出版社,2009.
LEI H M. Theory of guidance and control for missile[M]. Beijing: National Defense Industry Press, 2009.
[21] 卜祥伟,吴晓燕,陈永兴.非线性干扰观测器的高超声速飞行器自适应反演控制[J].国防科技大学学报,2014,36(5):44-49.
BU X W, WU X Y, CHEN Y X. Adaptive backstepping control of hypersonic vehicles based on nonlinear disturbance observer[J]. Journal of National University of Defense Technology, 2014, 36(5): 44-49.
猜你喜欢
特区文学·诗(2021年6期)2021-12-22
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年2期)2021-06-09
数学年刊A辑(中文版)(2021年4期)2021-02-12
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
数学物理学报(2019年5期)2019-11-29
金色少年(奇趣科普)(2017年11期)2017-11-28
北京航空航天大学学报(2017年6期)2017-11-23
铁道科学与工程学报(2015年5期)2015-12-24