基于自适应下垂控制的多机逆变器双模式运行及平滑切换研究
2018-03-29 07:32王晓寰张敏霞张纯江刘海鑫电力电子节能与传动控制河北省重点实验室燕山大学电气工程学院河北秦皇岛066004
电工电能新技术 2018年3期
王晓寰, 张敏霞, 张纯江, 刘海鑫(电力电子节能与传动控制河北省重点实验室, 燕山大学电气工程学院, 河北 秦皇岛 066004)
1 引言
由于环境和能源问题日益严重,可再生能源的开发与利用越来越受到人们的重视[1,2]。当今分布式发电技术已成为新能源应用领域重要的技术手段,将分布式电源与大电网相连实现并网发电是对大电网的有效补充。由于单机分布式微源容量和可靠性的限制,使得多机逆变器组网接入电网更具有实用价值[3]。同时为了保障敏感负荷的供电可靠性,要求分布式微源在电网故障或检修情况下,仍可工作于独立运行模式。为了减小分布式微源对电网的冲击和提高敏感负载的供电质量,必须实现运行模式的平滑切换[4]。
要实现多机分布式微源工作于独立运行和并网运行两种模式,需要解决多机分布式微源无互联线组网、与电网电压同步和运行模式平滑切换三个方面的技术问题。对于以上三个方面国内外学者均进行了深入的研究。针对分布式微源的组网控制,各个分布式微源间无需互联线的下垂控制成为首选的技术方案。文献[5]提出了通过对控制参数选择来获得感性的逆变器等效输出阻抗,从而改善线路阻抗特性的思想,但实际逆变器等效输出阻抗较小,对线路阻抗的影响有限。文献[6]中引入虚拟电感,通过逆变器总滤波电感值确定输出阻抗,校正线路阻抗为感性,但这将导致逆变器输出电压谐波含量升高,影响负载的供电质量。文献[7]提出了分层控制思想,该控制方案将分布式单元分为三个控制层,即内环控制层、恢复同步控制层和功率控制层,每层分别设计控制器,可实现分布式微源的独立、并网双模式运行。但各控制器参数需要精确配合,设计过程复杂。针对与电网电压的同步控制,其难点是如何实现采用下垂控制分布式微源对电网电压的跟踪。文献[8]提出了在下垂控制中引入相位超前控制,使逆变器输出电压始终略超前于电网电压,从而在双模式运行切换过程中避免能量倒灌,但不易实现精确控制。文献[9]给出了一种基于分散式控制的频率电压恢复控制和预同步控制方法,此方法中众多逆变器各自调节可能会造成调节过程中功率分配不均以及系统低频振荡等问题。文献[10]提出基于分层控制和电压频率恢复控制的同步方法,从两个控制层次实现逆变器控制的二次调频,但系统中采用中央控制器实时掌握控制信号,增加了系统复杂度。文献[11]提出的状态跟随控制方法同样需要进行控制模式切换。
本文针对上述三个方面的问题提出了一体化的解决方案,即自适应下垂控制策略。通过引入带低通滤波器的虚拟阻抗控制,合理配置阻抗值实现不同容量分布式微源的无互联线并联,同时改善输出电压质量;引入主动同步控制实现采用下垂控制的分布式单元端口电压自主、快速、精确地跟踪电网电压,由独立运行切换到并网运行的过程中敏感负载电压平滑过渡;引入P-D/Q-I下垂控制实现电压型下垂控制并网,抑制有功超调,消除无功交换,使得控制算法具有不同运行模式的自适应性,达到平滑切换的目的。文中将详细分析所提出的控制方案,并通过仿真与实验验证其可行性。
2 自适应下垂控制
图1为多机逆变器组网结构图。各个带本地负载的分布式单元经过线路阻抗后,在交流母线上并联组网。交流母线上带有公共负载,该交流母线通过隔离变压器与大电网相连。
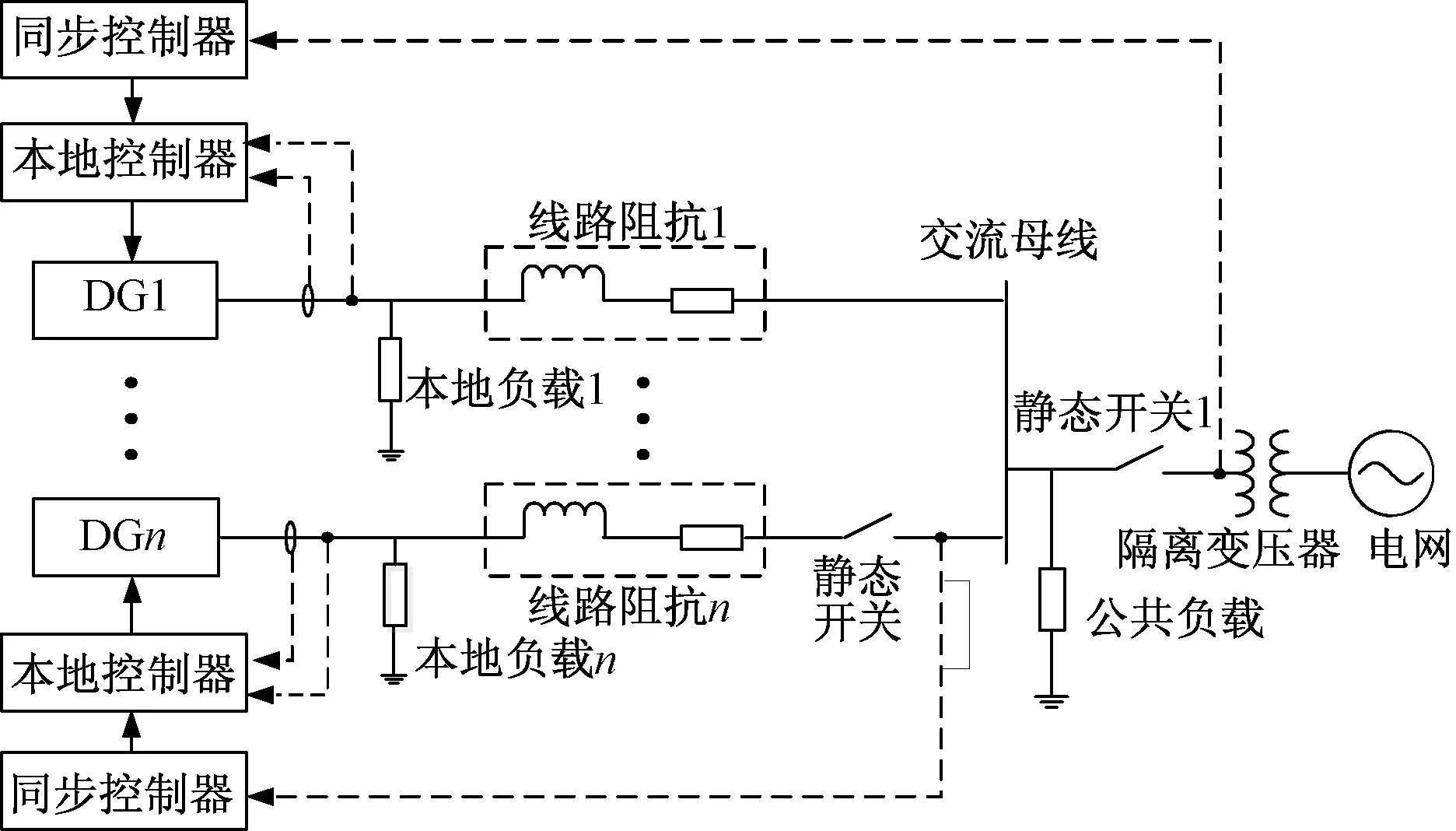
图1 多机逆变器组网结构图Fig.1 Multi-inverter network structure
自适应下垂控制原理图如图2所示。由图2可知,系统外环为改进下垂控制策略,通过测量负载电压和后级电感电流计算得到逆变器输出功率,经下垂控制后合成电压环的给定值。内环采用负载电压外环和电容电流内环双闭环控制,迅速跟踪下垂控制获得的给定值。为了克服低压电网下系统线路阻抗呈阻性的问题引入了虚拟阻抗控制,通过三相锁相环获得电网电压的幅值、频率和相位信息,通过主动同步控制跟踪电网电压。独立运行时各个分布式单元按各自容量分担负载功率;并网运行时,公共耦合点电压被电网钳位,此时有功功率输出近似为功率给定值,因此可以通过改变功率给定来控制逆变器以最大功率输出。

图2 自适应下垂控制原理图Fig.2 Adaptive droop control strategy
2.1 下垂控制原理
单个分布式微源接入电网示意图如图3所示。其中En为包括太阳能、风能在内的多种可再生一次能源经过电力电子变换获得的交流电源;Zo为各个分布式微源的等效输出阻抗,其值的大小与输出滤波器和控制器参数的选择有关;ZL为分布式微源与大电网之间的线路阻抗,其性质和大小分别由系统所处的电压等级和分布式单元的地理位置决定;S为并网开关;Zg为电网阻抗。

图3 单个分布式微源接入电网示意图Fig.3 Diagram of single micro-source connected to grid
由图3可计算得逆变器输出的有功功率和无功功率为:
(1)
式中,E为逆变器输出相电压幅值;φ为逆变器输出相电压的相角;Vg为电网输出相电压幅值;θL为线路阻抗相角。
当逆变器与电网间的线路阻抗近似成感性时,忽略其阻性成分,则有ZL=X,θL=90°。同时由于线路阻抗值较小,电压相角差φ一般不大,可近似认为sinφ≈φ,cosφ≈1,则式(1)可变形为:
(2)
由式(2)可知在纯感性线路阻抗条件下逆变器输出的有功功率和无功功率与逆变器端口电压相角和幅值之间的关系。当多机并联运行中的某台逆变器有功功率分量变大时,可以使其相角滞后,从而减小有功功率的输出;当逆变器输出的无功功率分量变大时,通过降低端口输出电压幅值方式来减小无功功率的输出,达到调节功率均衡输出的目的。在实际应用中,逆变器输出端电压的角频率ω比相角差φ更容易检测,通常以角频率ω代替相角差φ进行逆变器的控制,因此可得线路阻抗呈感性情况下下垂控制表达式为:
(3)
式中,ω*和E*分别为额定功率下的逆变器输出电压的角频率和幅值;P*为逆变器额定有功功率;kp和kq分别为有功下垂系数和无功下垂系数。下垂控制获得的ω和E合成电压给定值。
2.2 带低通滤波器的虚拟阻抗控制
如式(3)所示的P-f/Q-V下垂控制因与同步发电控制特性的兼容性,且可实现有功功率的自动无差均分而更适用于分布式微源的无互联线并联控制。但由2.1节分析可知该控制表达式是在线路阻抗呈感性情况下获得的,然而在配电网电压等级下线路阻抗呈阻性,因此需要引入一定的控制算法。虚拟阻抗算法具有较高的可行性和有效性,其控制思想来源于电路理论的等效阻抗定义,针对逆变器的输出阻抗在不同频段阻抗特性要求有所不同的特点,采用相应的控制策略,使得逆变器输出阻抗呈现系统期望特性[12]。该算法的引入减小了线路阻感比对传统下垂控制的影响,改善了分布式发电单元因自身差异引起的系统内阻抗不同和因安装位置引起的线路阻抗不同时系统功率的分配效果,同时又避免了引入均流电感导致的负面影响,其控制框图如图4所示。其中Gu(s)和Gi(s)分别为电压控制器和电流控制器传递函数,Zvir(s)为虚拟阻抗,L1、L2、C为滤波器,R为无源阻尼,kPWM为PWM变换器等效增益。其中
(4)
式中,kup和kui分别为电压控制器比例系数和积分系数。
Gi(s)=k
(5)
式中,k为电流控制器比例系数。
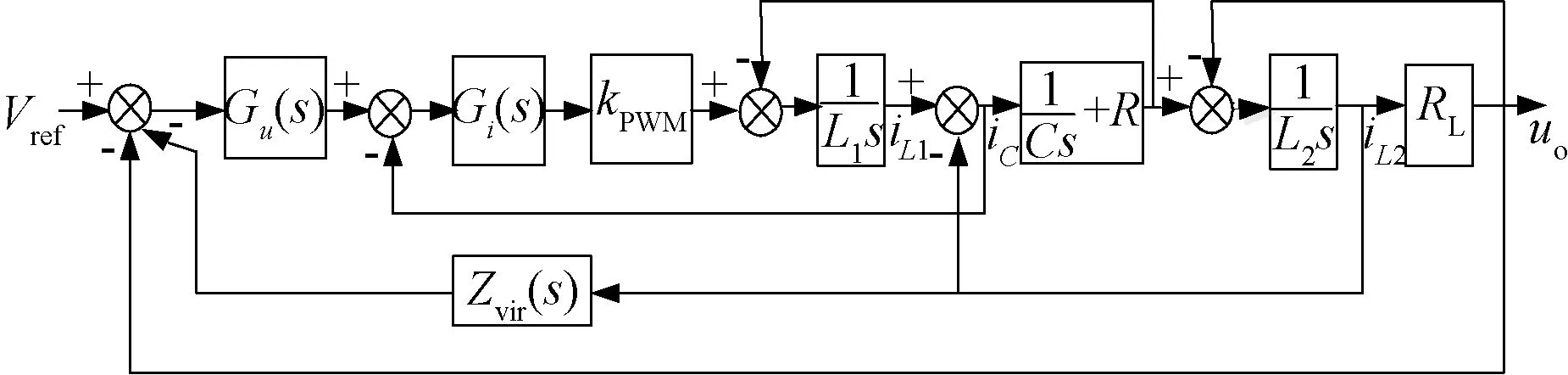
图4 虚拟阻抗算法原理图Fig.4 Virtual impedance control
由图4可知,加入虚拟阻抗也就是使逆变器输出电流以阻抗压降的形式从其参考电压中减去。当采用传统的虚拟阻抗控制算法时,势必会将输出电流中的谐波成分引入到参考电压中,这将导致逆变器输出电压谐波含量升高,影响敏感负载的供电质量。因此在这里引入低通滤波器,将输出电流中的高次谐波成分滤除,同时不影响其在低频段的阻抗校正特性,保证基波频率处为感性。这样就达到了在改变输出阻抗特性的同时,不影响输出电压质量的目的。加入低通滤波器后,使线路阻抗呈感性,Zvir(s)的表达式为:
(6)
式中,L为虚拟电感;ωf为低通滤波器截止角频率。
根据图4,当加入如式(6)所示的虚拟阻抗后,逆变器的等效输出阻抗为:
(7)
式中
B2=L1+L2+Lωf(kkPWMkup+kkPWMkuiRC)
B3=L1+L2+ωf(L1RC+L2RC+kkPWML2C)+
LωfkkPWM(C+RCkup)
B4=L1RC+L2RC+kkPWMCL2+L1L2Cωf+
LωfkkPWMRC2
图5为未加入虚拟阻抗、加入无低通滤波器的虚拟阻抗和加入带低通滤波器虚拟阻抗三种情况下的逆变器输出阻抗伯德图。由图5可知,系统未加入虚拟阻抗时,逆变器输出阻抗很小,不能起到改变线路阻抗性质的作用;加入虚拟阻抗后,逆变器输出阻抗呈感性,同时可根据需要自行设定阻抗值的大小;加入低通滤波器后,虚拟阻抗只在低频段起作用,高频段与逆变器自身输出阻抗相同,这样就改变了基频处的阻抗特性,减少了给定电压中的谐波含量。图5中还可以看出,加入低通滤波器后开关频率处输出阻抗呈阻性且幅值降低,从而减小了逆变器参考电压中的谐波含量,提高了逆变器输出电压质量。
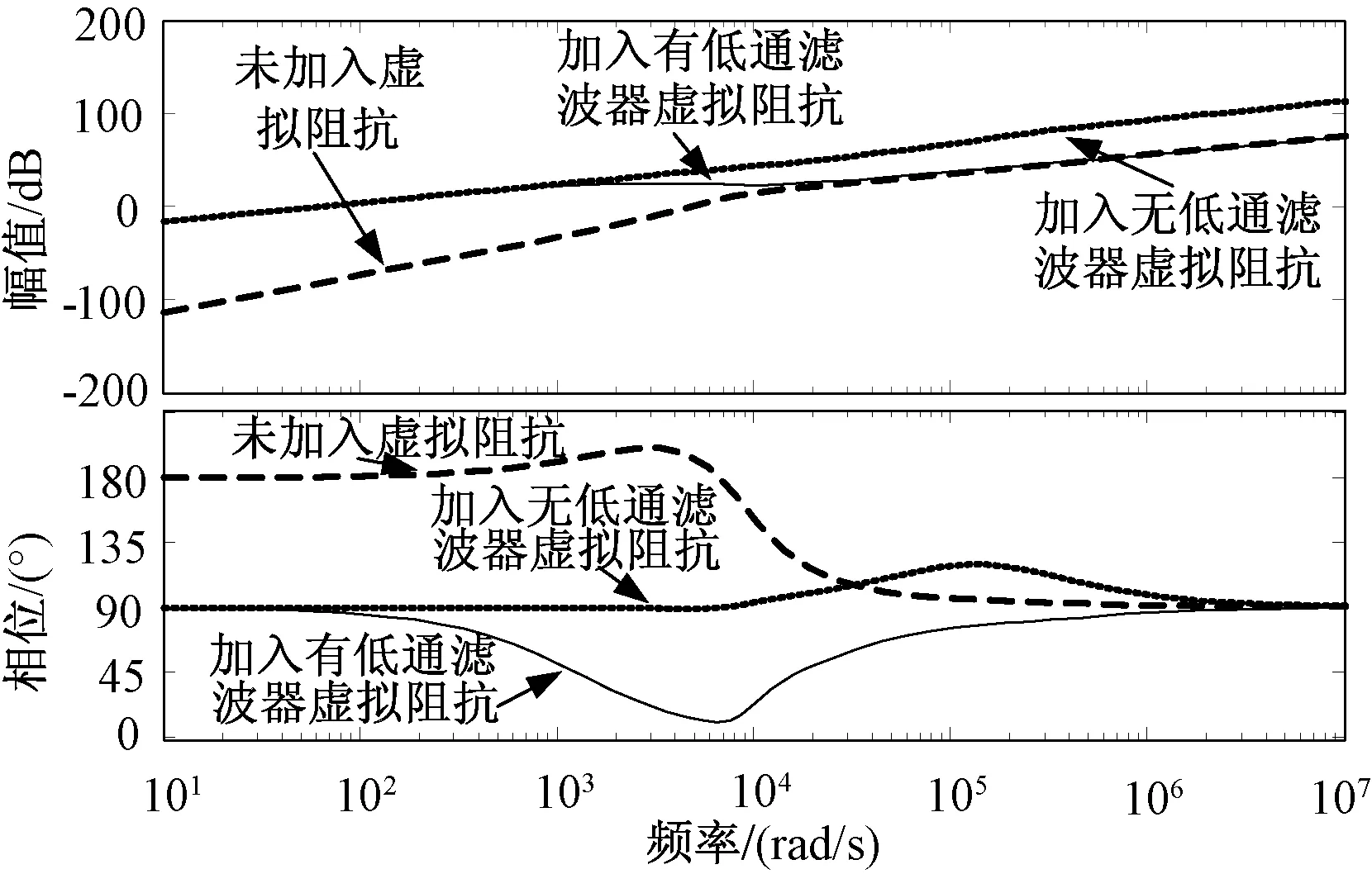
图5 三种情况下逆变器输出阻抗对比Fig.5 Comparison of inverter output impedance
低通滤波器的截止角频率ωf越大,逆变器等效输出阻抗越接近无低通滤波器时加入虚拟阻抗的情况,即在基频处感性成分越大;但此时对给定电压引入的谐波成分将增大,因此ωf的取值不宜过大。ωf的值同时不宜取得过小,当ωf的值过小时将会影响系统的动态响应速度,ωf的值至少要大于所设计双环系统的剪切频率。因此,ωf的取值要在输出阻抗特性、输出电压质量和系统动态响应速度三者之间做考虑。
虚拟电感L的取值要大于本机所在线路的自身阻抗值,这样才能达到改变阻抗性质的目的。但是过大的虚拟电感值会使得电压给定值降低,影响输出电压质量。因此,虚拟电感值的选取要在改善线路阻抗特性和输出电压质量之间折中选择。同时,多机并联运行的分布式单元加入虚拟阻抗还要考虑各个单机容量不同带来的影响。这是因为在分布式发电多机组网运行时,各个单元的容量各不相同,因此需要按照各自容量来分担负载功率。这里可以通过设置各个单元的下垂系数来调节它的功率输出,即设置其有功下垂系数和无功下垂与其容量成反比。然而各个单元的功率输出还与其线路阻抗存在关系。要想获得更佳的功率分配效果,输出阻抗的影响不容忽略。分布式发电单元m和n并联运行时,由式(2)可知逆变器输出的有功功率之比和无功功率之比为:
(8)
由于在稳态情况下,线路阻抗上电压降落较小,因有Em≈En,φm≈φn,因此可知逆变器输出的有功功率和无功功率与线路阻抗成反比,可通过设定虚拟电感值来实现线路阻抗值的选择。通过式(9)实现分布式发电单元更精确的负载分配:
(9)
式中,Xvirm和Xvirn分别为分布式单元m和n的虚拟电抗值;Sm和Sn分别为分布式单元m和n的视在功率。
2.3 主动同步控制
当系统采用下垂控制时,由于输出电压的幅值和负载无功功率存在对应关系,输出电压的角频率和负载有功功率存在对应关系,这就使得在负载功率固定的情况下,输出电压的幅值和频率是固定的,增加了系统与大电网同步的难度[13]。

图6 下垂控制电压调节原理Fig.6 Regulation principle of droop control voltage

通过获得补偿量Δω和ΔE可实现采用下垂控制时分布式单元输出电压频率与电压幅值的跟踪,然而要想达到独立运行向并网运行的平滑切换,还必须消除并网时刻的相角差。然而采用下垂控制时,系统的可控参量只有通过有功功率下垂控制获得的角频率和通过无功功率下垂控制获得的电压幅值两个量。由于通过对频率的控制可以间接地控制相角,因此可以在频率补偿量Δω中包含相角的控制信息,从而获得主动同步控制表达式:
(10)
式中,ωg和ωDG分别为电网角频率和分布式单元端口角频率;θg和θDG分别为电网相角和分布式单元端口相角;Eg和EDG分别为电网电压幅值和分布式单元端口电压幅值;Gω(s)为角频率跟踪控制器;Gθ(s)为相角跟踪控制器;GE(s)为幅值跟踪控制器。
为了使得分布式单元端口输出电压与电网电压做到无差跟踪,Gω(s)、Gθ(s)和GE(s)都采用比例积分控制器。在进行角频率补偿量的求取时可根据叠加原理分别进行角频率控制器和相角控制器的设计。由于角频率不同时才能进行相角同步,因此设计中应使相角控制器的响应速度快于角频率控制器。
2.4 双模式运行平滑切换控制
通过下垂控制实现电压型并网,则可保证在独立和并网运行两种模式下都控制分布式单元为电压源,这样就实现了运行模式切换过程中,公共耦合点电压的平滑切换。然而采用传统的下垂控制进行并网运行时,在并网时刻会产生一定的电流冲击,这对双模式平滑切换是不利的;同时稳态运行时还会产生无功交换,不满足对接入配电网分布式单元的要求。因此要实现采用下垂控制多机逆变器在运行模式切换过程中电压和电流无冲击的平滑切换,且具有运行模式的自适应性,需要对传统的下垂控制进行改进[14]。
2.4.1 有功下垂控制的改进
逆变器输出电流在并网时刻的冲击是由其输出有功功率在并网时刻存在超调导致的。因此为了降低系统在并网时刻的功率超调,需要增加系统的阻尼,为此在下垂控制方程中引入微分项,如式(11)所示:
(11)
建立系统的小信号模型来分析引入微分项对系统性能的影响。对式(11)进行拉普拉斯变换后得到小信号模型为:
Δω(s)=Δω*(s)-(kp+kds)ΔP(s)+kpΔP*(s)
(12)
对式(2)进行拉普拉斯变换得:
(13)
式中,Eo、Vgo分别为静态工作点逆变器端口电压、电网电压;X为线路感抗值。
已知
(14)
由式(12)~式(14),并考虑功率计算中由瞬时功率获得平均功率时加入的低通滤波器,可以获得改进有功控制的小信号模型,如图7所示。其中ωn为获取平均功率低通滤波器截止频率。

图7 改进有功控制小信号模型Fig.7 Small-signal model of improved droop control
由图7可得ΔP(s)的表达式为:
(15)
由式(15)可得改进有功下垂控制的特征方程为:
s2+(ωn+ωnkdK)s+ωnkpK=0
(16)
根据式(16)绘制系统的根轨迹,如图8所示。随着kd的增加,系统特征根虚部逐渐减小,即系统阻尼增大,这必将导致系统振荡减小。当系统特征根移动到实轴上时,可达到无超调。由图8中还可知,随着kd增加系统的稳定性降低。因此可以通过引进微分环节,增加系统的阻尼,从而消除并网时刻的功率超调,达到入网电流的平滑过渡。
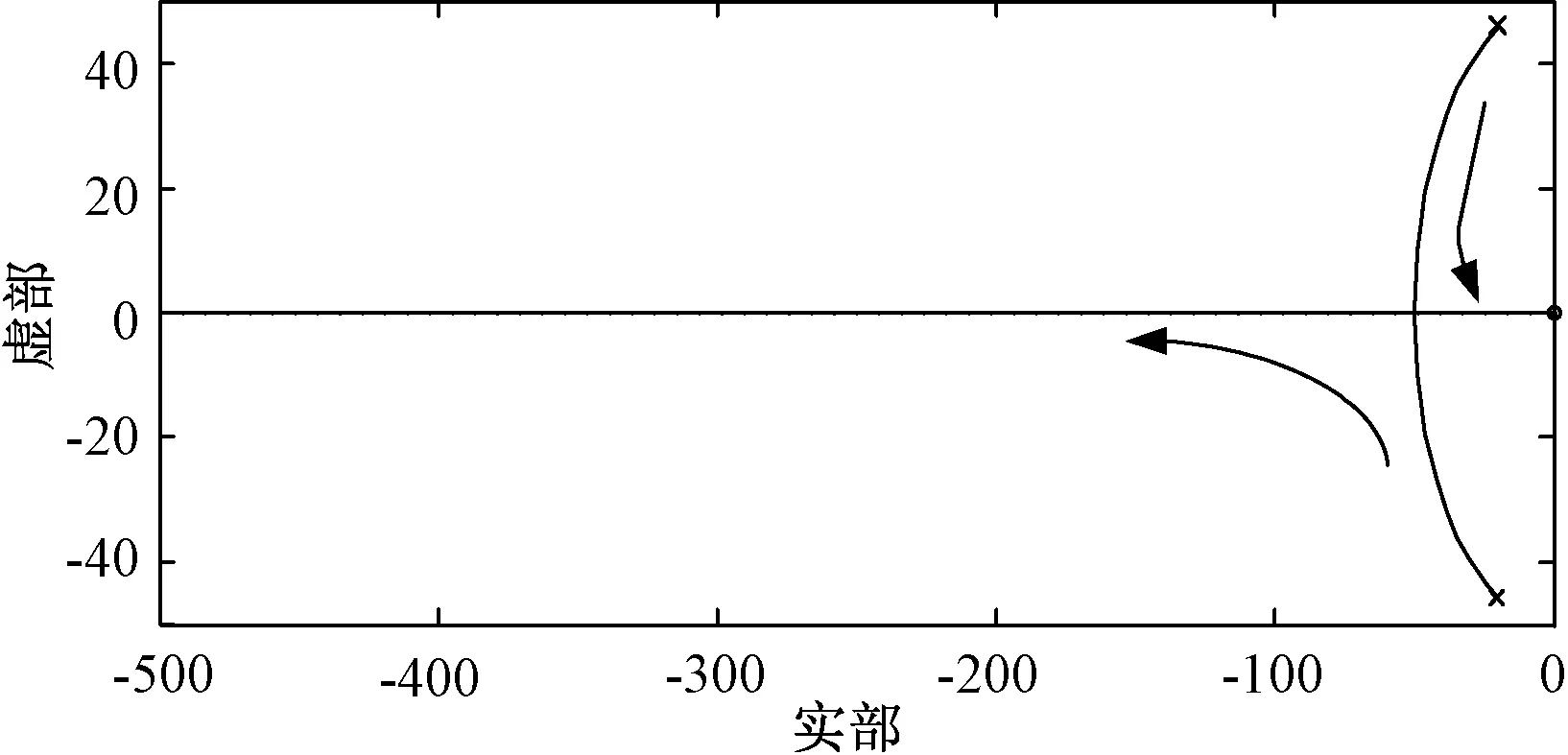
图8 ki=0.001时kd变化系统的根轨迹Fig.8 Root locus of improved droop control
2.4.2 无功下垂控制的改进
在现行规定下,不需要分布式电源参与电网无功功率的调节,因此必须使得分布式微源在并网运行时与电网间不存在无功交换。然而采用传统下垂控制并网时,产生无功交换的原理如图9所示[15]。当分布式微源与电网间存在有功功率传输时,必将在线路阻抗上产生压降。根据有功功率的流向,使得端口电压高于或低于电网电压,无功下垂系数较小,从而产生较大的无功交换。
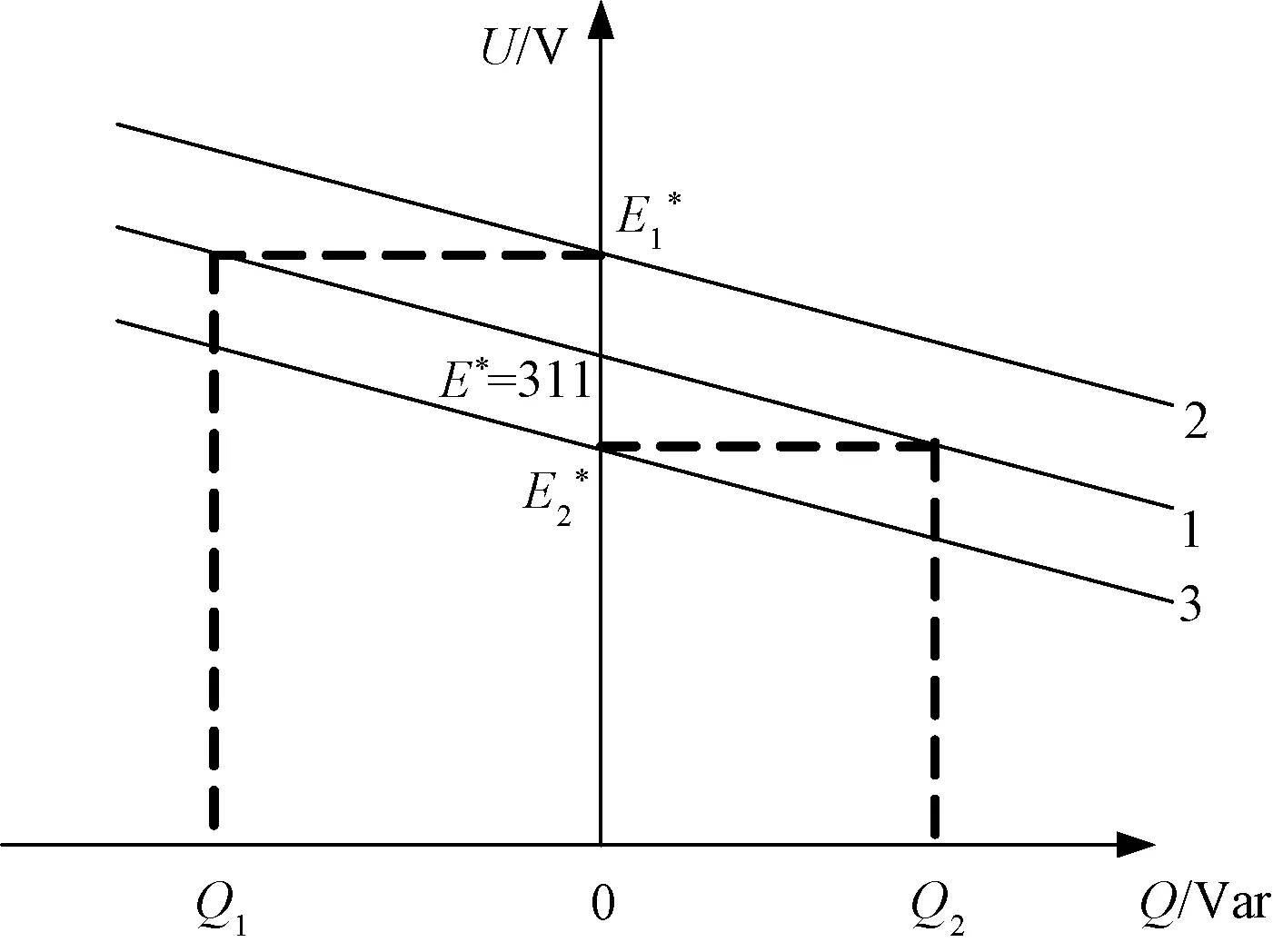
图9 传统下垂控制并网无功交换产生原理Fig.9 Principle of reactive power exchange in grid-connected mode with conventional droop control
因此当逆变器带有无功本地负载时,并网运行时只输出负载所需的无功功率即可。由于入网有功功率一定,端口电压是固定的,因此可以通过下垂曲线的上下平移达到输出固定无功功率的要求。根据上述分析提出并网运行时改进的无功控制策略,如式(17)所示:
(17)
式中,Qload为分布式单元按容量应承担的无功功率;ki为无功下垂积分系数。
3 仿真与实验
3.1 仿真分析
利用Matlab/Simulink仿真软件对文中提出的控制方法进行验证。图10为加入主动同步控制策略时多机组网系统的端口电压、电网电压和两者之差的波形。由图10可知,分布式单元开始为独立运行,其输出电压与电网电压的差值随时间变化。在0.2s时刻接收到并网信号,开始加入主动同步控制策略,此时分布式单元端口电压逐渐向电网电压靠近,两者差值逐渐减小,在0.7s时两者差值已经接近于0,达到了并网标准。从接收到并网信号时刻起,0.5s内即可完成对电网电压的跟踪。

图10 主动同步控制的仿真Fig.10 Simulation of active synchronization control
图11为多机逆变器双模式运行时的仿真结果。由图11(a)可知,独立运行时各分布式单元按照容量分配负载功率,即P1=4kW,P2=2kW;加入主动同步控制后0.8s闭合并网开关,并网时刻有功功率无超调,分布式单元输出各自的额定功率,即P1=8kW,P2=4kW。由图11(b)可知,独立运行时无功功率均分效果较好,并网运行时与电网无无功交换,稳定输出为0。由图11(c)可知,在并网过渡时刻,逆变器输出电流无超调。由图11(d)可知,入网电流和电网电压同频同相,系统实现了单位功率因数并网。

图11 多机逆变器双模式运行Fig.11 Simulation of multi-inverter in two-modes operation
3.2 实验验证
对所提出的控制策略进行了单机情况下的实验验证。实验中线路阻抗按照低压电网下的特性取Rline=2Ω、Lline=1mH。本次实验在60V电压等级下完成,负载为18Ω的三相阻性负载。
图12为主动同步控制实验波形。与仿真波形图10相对应,验证了主动同步控制的可行性。图13(a)为并网时刻逆变器输出电压和电流波形,可知系统运行稳定,输出电压、电流无冲击,实现平滑切换。图13(b)为逆变器输出功率波形,可知并网时刻逆变器输出有功功率无超调,并网运行按照额定值输出,且无无功交换,与仿真波形图11(a)、图11(b)相对应。图13(c)为入网电流与电网电压波形,与仿真波形图10相对应,可知系统实现单位功率因数并网。

图12 主动同步控制实验波形Fig.12 Experimental waveforms of active synchronization control
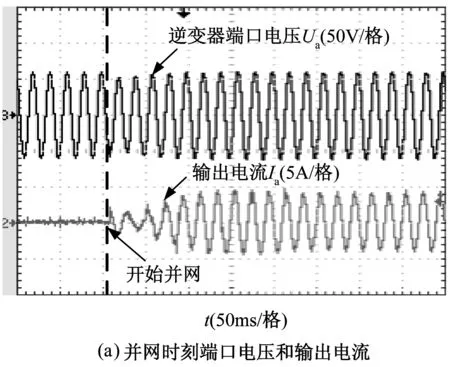


图13 自适应下垂控制实验波形Fig.13 Experimental waveforms of active droop control
实验波形与仿真分析相一致,验证了所提出的自适应下垂控制的有效性,实现了两种运行模式的自适应调整,且模式切换过程中无电压和电流冲击,达到了平滑切换。
4 结论
本文根据多机逆变器双模式运行的要求提出了自适应下垂控制策略。首先改进了传统的虚拟阻抗控制,引入低通滤波器改善线路阻抗特性的同时,降低对输出电压质量的影响,实现了不同容量分布式微源的无互联线并联。主动同步控制的提出使得采用下垂控制的分布式单元快速跟踪电网电压,保证电压的平滑过渡。最后对传统下垂控制的改进能够抑制并网时刻功率超调,实现逆变器输出电流的平滑过渡,同时消除并网时刻的无功交换,实现了单位功率因数并网。仿真与实验都证明了所提出控制策略的有效性。
[1] 陈国呈,蔡立清,周勤利,等(Chen Guocheng, Cai Liqing, Zhou Qinli, et al.).电力电子在微电网、智能电网、智能社区中的应用动向(Trend of power electronics in micro grid, smart grid and smart community)[J].电工电能新技术(Advanced Technology of Electrical Engineering and Energy),2014,33(11):1-12,34.
[2] Wang Chengshan, Yang Xianshen, Wu Zhen, et al. A highly integrated and reconfigurable microgrid testbed with hybrid distributed energy sources[J]. IEEE Transactions on Smart Grid, 2016, 7(1): 451-459.
[3] Chamana Manohar, Bayne Stephen B. Modeling, control and power management of inverter interfaced sources in a microgrid[A]. Proceedings of 2011 IEEE 33rd International Telecommunications Energy Conference (INTELEC) [C]. 2011. 1-7.
[4] Micallef Alexander, Apap Maurice, Spiteri-Staines Cyril. Single-phase microgrid with seamless transition capabilities between modes of operation[J]. IEEE Transactions on Smart Grid, 2015, 6(6): 2736-2745.
[5] 王成山,肖朝霞,王守相(Wang Chengshan, Xiao Zhaoxia, Wang Shouxiang).微网中分布式电源逆变器的多环反馈控制策略(Multiple feedback loop control scheme for inverters of the micro source in microgrids)[J].电工技术学报(Transactions of China Electrotechnical Society),2009,24(2):101-107.
[6] 张庆海,周乐明,陈燕东,等(Zhang Qinghai, Zhou Leming, Chen Yandong, et al.).感性逆变器并联动态性能分析及多环控制策略(Dynamic performance analysis and the multiple loop control strategy for parallel inverters using perceptual output impedance)[J].电力电子技术(Power Electronics),2015,49(12):88-91.
[7] Guerrero Josep M, Vasquez Juan C, de Vicua Luis García, et al. Hierarchical control of droop-controlled AC and DC microgrids - A general approach toward standardization[J]. IEEE Transactions on Industrial Electronics, 2011, 58(1): 158-172.
[8] 王明玥,罗安,陈燕东,等(Wang Mingyue, Luo An, Chen Yandong, et al.).三相逆变器的双模式及其平滑切换控制方法(The dual-mode control and seamless transfer control method of three-phase inverter)[J].电工技术学报(Transactions of China Electrotechnical Society),2016,31(16):124-134.
[9] Lee C T, Jiang R P, Cheng P T. A grid synchronization method for droop-controlled distributed energy resource converters[J]. IEEE Transactions on Industry Applications, 2013, 49(2): 954-962.
[10] 施永,赖纪东,苏建徽,等(Shi Yong, Lai Jidong, Su Jianhui, et al.).微网系统运行模式平滑切换控制策略(Control strategy of seamless transfer for microgrid operation mode)[J].电力系统自动化(Automation of Electric Power Systems),2016,40(8):85-91.
[11] 郑竞宏, 王燕廷,李兴旺,等(Zheng Jinghong, Wang Yanting, Li Xingwang, et al.).微电网平滑切换控制方法及策略(Control methods and strategies of microgrid smooth switchover)[J].电力系统自动化(Automation of Electric Power Systems),2011,35(18):17-22.
[12] Chen Zhongwei, Zhang Wei, Cai Jiuqing, et al. A synchronization control method for micro-grid with droop control[A]. 2015 IEEE Energy Conversion Congress and Exposition (ECCE) [C]. 2015. 519-524.
[13] Chao Changhee, Jeon Jin-Hong, Kim Jong-Yul, et al. Active synchronizing control of a microgrid[J]. IEEE Transactions on Power Electronics, 2011, 26(12): 3707-3719.
[14] 张纯江, 王晓寰,薛海芬,等(Zhang Chunjiang, Wang Xiaohuan, Xue Haifen, et al.).微网中三相逆变器类功率下垂控制和并联系统小信号建模与分析(A quasi-power droop control of three-phase inverters and small signal modeling and analysis of parallel system in micro-grid)[J].电工技术学报(Transactions of China Electrotechnical Society),2012,27(1):32-39.
[15] Kim Jaehong, Guerrero Josep M, Rodriguez Pedro, et al. Mode adaptive droop control with virtual output impedances for an inverter-based flexible AC microgrid[J]. IEEE Transactions on Power Electronics, 2011, 26(3): 689-700.
猜你喜欢
机电信息(2018年6期)2018-03-05
制造技术与机床(2017年2期)2017-05-04
现代工业经济和信息化(2016年8期)2016-05-17
电测与仪表(2016年24期)2016-04-12
西部广播电视(2015年10期)2016-01-18
电测与仪表(2015年8期)2015-04-09
电测与仪表(2015年19期)2015-04-09
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
电子测试(2013年19期)2013-09-13