基于偏振技术的水下探测器光学系统设计
2018-03-29 05:12杨帆王春艳庞广宁刘欢
长春理工大学学报(自然科学版) 2018年1期
杨帆,王春艳,庞广宁,刘欢
(长春理工大学 光电工程学院,长春 130022)
研究表明,海水中也存在着一个类似“大气窗口”的“海洋窗口”,即波段在470nm~580nm之间的光波在海水中传播衰减的程度最小[1]。因此,可以选用这个波段的激光器作为光源来进行水下探测。
但是由于水介质的复杂性,以及光在水中传播的复杂性,水下探测的距离、精度、可靠性都会受到极大影响,客观上使得水下难以实现“透明化”,本文考虑利用光的偏振特性来进行探测。偏振探测的优势在于能够提供关于目标的表面粗糙度、纹理走向、表面电导率、材料的理化特性、含水量等信息[2]。
光的偏振性就像光的波长、强度、频率一样,也是光的基本属性。不同被测物体受到相同辐射,表面很可能会含有不同的偏振信息,因此可以通过检测被测物体反射光的偏振特性来了解物体表面的一些固有属性,从而达到分辨材质的目的[3]。
1 水下探测器工作原理
Stokes参量是描述偏振光的常用方法之一。Stokes参量既可以表示全偏振光,又可以表示部分偏振光甚至是自然光,并且较为容易直接或者间接探测到[4],使用范围广泛。Stokes参量用矢量的表示方法为,其定义如下:

在全偏振光中,S0与其它三个参量的关系为:

其中,S0是总光强;S1描述的是0°方向与90°方向的差值;S2描述的是+45°方向的光强与-45°方向的差值;S3描述的是光束中左旋或者右旋圆偏振光占优势的量[5]。由以上几个参数就可以求出最后要得到的偏振度P,偏振度的表示方法为:

所以,全偏振光的偏振度为1;部分偏振光的偏振度在0到1之间;自然光的偏振度为0。
比较传统的测量Stokes参量的方法是单光路调制法,即用偏振器件绕光轴旋转不同角度,分别测量不同偏振角度下的偏振光强,得出Stokes参量。这种方法的优点在于光路容易搭建,结构也比较简单,但是必须分时复用,不能测量光强变化很快的光束,而且使用起来较复杂。
本文提出了一种基于分振幅原理的测量偏振光的方法,如图1所示,将待测光束先通过前面的光学系统,分解成4个不同偏振方向,用4个探测器同时完成对某一瞬时的各个Stokes参量的测量[6]。这种装置的结构更加紧凑,测量更加方便。

图1 水下探测器测试原理平面示意图
本文中光学系统是一个主动照明成像系统,用532nm的激光器作为光源从水面以上向水下目标发出激光,将水下探测器放在水面以下接收被照射目标的反射光,这样省去了距离选通技术,也同样可以很好地将水面反射光和水下物体的反射光区分开来[7]。被照射目标的反射光进入光学系统,经过前面的透镜组后,被分光棱镜分为2束光,再分别进入到摆放位置为0°和45°的偏振分光棱镜中,这样就能得到偏振棱镜透光轴与参考方向成0°,45°,90°,135°的4个方向的偏振光,再同时分别用4个光电二极管或者CCD图像中的灰度值测量出4个方向上的光强。通过电路进行光电转换,将4个光强信号转化为电信号输出。其中S0,S1,S2根据公式(1)-(3)很容易计算出,而S3由于在实际偏振探测中,在仪器检测范围内,相对于仪器误差来讲,圆偏振分量可以忽略,况且,由于可见光的频率极高,设备无法检测其瞬间的方向,所以通常假设S3≡0。因此,只要求出前3个Stokes参量,就能求出被照射物体的偏振度,区分出不同材质,达到测试目的。
2 光学系统设计
2.1 光学系统指标的确定
根据测试要求,测试水深为10m以内,即可以将物体反射光视为从无穷远入射进入光学系统。光学系统光波波长由激光器出射光波长决定,考虑激光在水中衰减特性和激光器成本,选择使用532nm波长的激光器,因此光波为532nm单色光;探测器拟选用日本滨松某型号硅光电探测器,该探测器有效探测面积为10mm×10mm,即像面边长为10mm;根据测试原理,激光垂直向水中物体照射,探测设备也几乎垂直接收反射光,但是由于激光在水中会发生散射,经查阅资料,大部分反射光能量集中在发散角度5°之内,因此视场角定为5.2°,再根据像面边长10mm,可以算出焦距为110mm;在测试过程中,激光经过水中传输导致反射光相对微弱,所以要求通光孔径要大一些保证接收足够的能量,在这里将FNO.定为2~3;在设计中要先设计前面的光学系统,再添加分光棱镜及偏振分光棱镜,所以系统后截距也要留有足够余量。最后确定基本的光学系统指标,如表1所示。

表1 光学系统指标
虽然这个光学系统对于尺寸没有做硬性规定,但是从成本和实际使用方便情况来考虑,决定光学总长要控制在200mm之内,镜片最大口径控制在65mm之内。
2.2 初始结构的选取及优化
根据经验,设计一个这种指标的光学系统,不算上棱镜,最少可以采用5片镜片的结构,光阑位置在中间即可。
本次设计中光波为单色光,则不需要考虑色差,那么光学系统中可以不需要双胶合镜片。
根据设计指标,视场角较小,相对孔径较大,光阑前面可以采用三片分离的镜片,这样能更好地矫正球差,增加自由度,但是光能可能会损失稍微多一些,而且装调时要注意镜片倾斜和面偏的问题。
根据以上分析,可以直接从lensview软件数据库中寻找初始解。按照一定条件筛选,找到一个符合需求的美国专利,作为初始解。按照所需指标更改波长,视场角,一点点放大口径,同时进行优化。对于这个系统的优化来说,难点主要在于在焦距固定、总长不能太长的前提下,要尽量去扩大通光口径,而且要在通光口径增大的同时保证像质。需要注意的是光路最后部分的棱镜的添加会使整个光路发生很大的变化,棱镜材料的选择并没有选择常用的K9玻璃,而是根据工厂的实际加工能力,采用HZF2成都光明环保玻璃作为分光棱镜和偏振分光棱镜的材料。
2.3 优化设计结果及像质评价
考虑指标,工艺,成本,结构设计等多方面因素,对初始结构反复优化,(在这个光学系统中因为4束光路除了方向不同,偏振特性不同,其它均为一样,为方便起见,这次设计只优化其中1条光路)最终得到结果,如图2所示。

图2 优化后光路
系统焦距110.1mm,光学总长181.343mm,视场角为5.2°,FNO.为2.1。
图3-图5分别是系统点列图、以及衍射能量分布图、MTF曲线图。结果显示:点列图中有轻微的弥散斑,弥散斑直径的均方根值极小,不到1μm,适合能量探测;由系统衍射能量分布曲线可以看出,在弥散斑范围内衍射能量大于95%,因此该系统的能量集中度高,光能利用率非常好;如果考虑用CCD作为探测器,光学系统MTF曲线很接近衍射极限,成像质量较好。
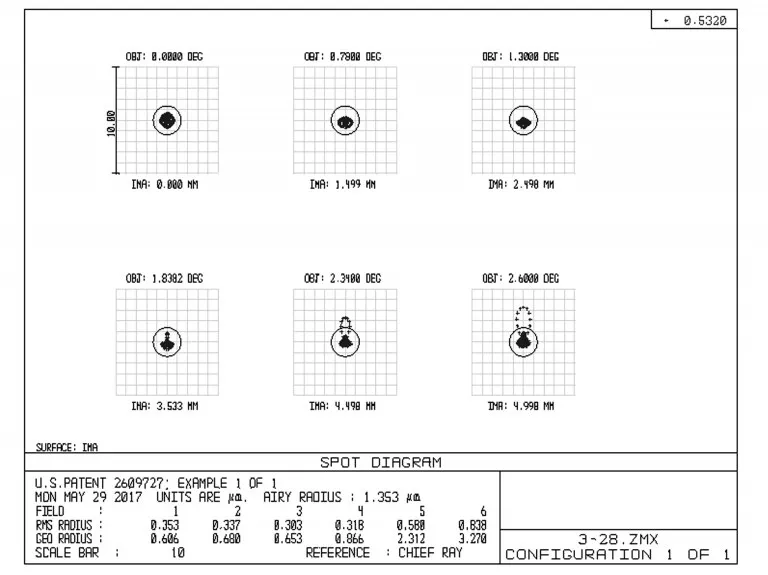
图3 点列图

图4 衍射能量分布图

图5 MTF曲线
从结构设计方面考虑,该光学系统采用“两头装”的方式,前3片透镜之间间隔较大,且3片透镜均有1面为平面,这在一定程度上降低了结构设计难度,后两片透镜高度改为相同,这些都为后续工作带来极大便利,提高可行性。
3 实验结果与结论
对本文设计的光学系统进行结构设计并加工后,整个设备实物图如图6所示。

图6 探测器实物图
在实验室中模拟10米水深环境,如图7所示,用波长为532nm的激光器进行测试。
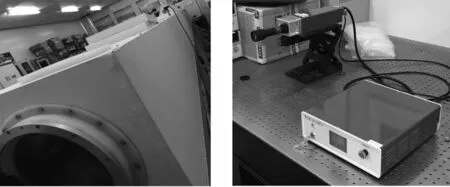
图7 10m长水箱和532nm波长的激光器
被测物体有塑料,瓷砖,铝板,合金,它们材质不同且表面光滑度相差很多。对以上几种物体分别在1m,3m,5m,7m,9m水深下进行测试,根据前文的测试流程,测得的偏振度如表2所示。

表2 偏振度测试结果
其中,铝板,合金为金属且表面光滑,偏振度较高,塑料表面极为粗糙且因为材质特性,偏振度很低,与理论相符。
本文设计的光学系统在光学指标,工艺,成本,结构等方面均达到要求,最后实测结果也和理论相符,因此可以满足激光水下偏振探测的需求。
[1]杨华勇,梁永辉.机载蓝绿激光水下目标探测技术的现状及前景[J].光机电信息,2003(12):6-10.
[2]都安平.成像偏振探测的若干关键技术研究[D].西安:西北工业大学,2006.
[3]周馨雨.Stokes空间中的偏振解复用技术研究[D].成都:西南交通大学,2016.
[4]赵永强,潘泉,程咏梅.成像偏振光谱遥感及应用[M].北京:国防工业出版社,2011:28-40.
[5]DennisGoldstein.Polarizedlight[M].New York:Marcel Dekker,2003:51-61.
[6]程敏熙,何振江,黄佐华.分振幅法偏振光斯托克斯参量测量系统[J].光电工程,2008,35(5):93-97.
[7]王智,杨简,金光.激光主动照明成像技术[J].长春理工大学学报:自然科学版,2004,27(2):31-34.
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
山西大同大学学报(自然科学版)(2020年1期)2020-04-02
空间电子技术(2020年5期)2020-03-11
少儿美术(快乐历史地理)(2020年4期)2020-02-24
学苑创造·A版(2019年4期)2019-05-10
现代职业教育·中职中专(2018年11期)2018-06-11
艺术科技(2016年9期)2016-11-18
光学精密工程(2016年3期)2016-11-07
计算机时代(2016年5期)2016-05-21
中国中医药现代远程教育(2014年14期)2014-03-01