基于马氏距离的夜间车灯检测方法
2016-05-21 16:25李姣徐向华
计算机时代 2016年5期
关键词:反射光
李姣+++徐向华


摘 要: 针对监控场景下夜间车辆的车灯检测过程中存在地面反光干扰的问题,提出一种基于马氏距离分类和梯度特征的车灯检测算法。该方法与通过几何约束过滤、基于亮度差异过滤等方法相比,具备较好的检测性能及亮度适应性,本算法实现了夜间车辆检测所需的较高检测准确度以及实时性能。
关键词: 前车灯检测; 车辆检测; 反射光; 马氏距离; 梯度特征
中图分类号:TP391.4 文献标志码:A 文章编号:1006-8228(2016)05-70-03
Abstract: For the problem of the interference of reflection in the ground in the detection of headlight in night traffic surveillance, this paper proposes an algorithm based on Mahalanobis distance classification and the gradient features for headlight detection. Compared with the current algorithms such as geometric constraints filtering and luminance filtering, the proposed algorithm has reached a better detection rate and luminance adaptability, and has higher accuracy and real-time performance.
Key words: headlight detection; vehicle detection; reflection; Mahalanobis distance; gradient features
0 引言
智能交通监控系统中的车辆检测系统在白天场景下的研究已比较成熟,但在夜间亮度较暗的场景下,仍需进一步研究。夜间车辆检测中,前车灯检测是主要检测方式。在已有方法中,文献[1]提出基于形态学的方法,利用形状等形态特征为判断条件,筛选出车灯,根据车灯的亮度信息[2-4]检测的方法,首先进行阈值分割,再利用空间聚类法检测车灯区域。已有方法中也有基于机器学习算法[5],但现有算法通常不能达到实时检测效果。同时,检测过程存在路面上的反射光干扰问题。对于反光问题,Wei Zhang[6]提出通过大气散射和LOG滤波,提取出可区分车灯和反射光的特征,再以MRF方法将反光剔除的方法,但该方法采用的MRF方法,计算量大,适应性不强。
本文提出一种基于马氏距离分类法的夜间路面反射光检测方法,解决夜间道路车辆检测中的反射光干扰问题。首先,根据图像中车灯区域与反射光区域之间的梯度变化不同,利用大气散射原理和LOG滤波构建区分车灯和反射光的统计特征;然后,利用马氏距离实现车灯与反光的分类,检测出车灯。
1 特征提取
本文根据分析提取出一个能较好描述车灯和反光的三维特征,依据其特征,进一步使用分类方法检测出车灯区域。三维特征的每一维度为:灰度图(I)、反射光(RI)、反射弱光图(RS)。灰度图I特征是使用直方图双峰法对原图的灰度图进行阈值分割得到;反射光RI特征是根据大气散射原理处理得到;反射弱光图RS是通过将图像进行LOG滤波器处理得到。
1.1 夜间车灯与反射光的梯度分布特征
通过观察实验,灰度化处理后的车灯和反射光区域均很亮,若仅根据亮度特征,并不能准确区分车灯和反射光。通过数据统计发现,车灯和反射光区域周边的亮度梯度有较明显的差异,该特征可作为区分车灯和反射光的特征。从选取的亮区域边缘外层值为255的像素开始,从亮区域内部往外进行扩展,以三个像素为跨度选取出对应像素点的值X,通过上述步骤随机选取正负样本各八百个来进行亮度梯度值计算。
本文使用LOG函数处理图像得到反射弱光图(RS),来进一步区分车灯和反射光信息。如图1,利用光源的直径值描绘对应的亮度程度。可知,图像近似指数型的形状。图像I进行高斯滤波处理后,车灯区域的亮度程度在指数减少处呈现较高值。而反过来,则较低。
LOG公式如下:
⑴
σ为标准偏差。先对图像I进行反色处理,再与拉普拉斯高斯定理实行卷积,定义S为上述处理后的结果,则:
⑵
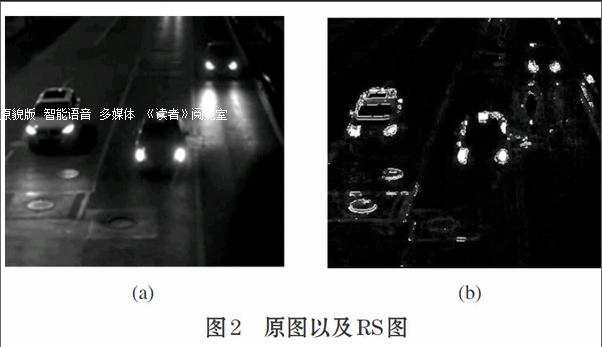
拉普拉斯高斯滤波的处理结果图如图2,最终得到反射弱光图如图2(b)所示,和图2(a)对比可知车灯区域几乎不变,而反射光被处理成了背景。
1.2 车灯和反射光的反射图
夜间场景中,车灯光会照射到路面上形成反光,摄像头再从地面上采集回来反光的信息,从而,车灯与反射光的光是两种有差异的光源。基于Bouguer衰减指数定律:
⑶
I0(λ)是对应光源辐射强度值;γ(λ)是光源波长λ的总散射系数,d是光源与摄像头之间的范围。图像I中的一个像素点,设其为(x,y),为该像素点划定出两个区域,分为内区域和外区域
⑷
在里进行最值的计算,定义最小值为,最大值为,定义一个光源为,该光源的散射光是。则散射系数为:
⑸
为、间的距离。在区域中找到对应的最值和,两最值间范围是。基于大气散射原理,图像I通过该原理计算得出对应的反射光图RI:
⑹
根据前面公式,车灯周围区域的RI结果图结果值会较低。在像车灯这样的区域, RI值会较小,反射光区域RI值较大。
按照图3中的原图3(a)和反射强光图3(b)的结果可知,在RI图里,原图处于高亮状态的车灯区域变得较暗,融入了背景,而反射光反而呈现凸显的效果。
1.3 车灯和反射光的灰度特征
已有算法中常用直方图双峰法则来实行图像的初步处理,在本场景下我们将要处理的图像的直方图展现的是两个峰顶一个谷底的形状,刚好符合双峰法则。双峰法则功能是进行前景与背景的分离,主要方式是选取谷底的像素值作为分割阈值。通过统计夜间车辆图像,得到对应阈值浮动在210与245之间。
通过上述方式计算出阈值T后,对原图像灰度图中像素进行阈值分割计算,图像中那些像素值高于阈值T的,像素值保持,而小于T的,将其值重设为0。
1.4 车灯和反射光的统计特征
我们随机选取不同场景的1500个车灯像素和2200个反光像素的RI、RS、I特征,将像素特征归一化,形成图4所示的统计分布。可以看出,车灯和反光有较明显的区分度,故可利用该特征进行分类。
2 马氏距离判别法
马氏距离,是一种有效计算两个样本集相似度的方法。本文样本有两种:车灯和反光。其定义为G1、G2,其均值分别为μ1,μ2。
判别测试样本是属于车灯还是反光,通过计算测试样本与两样本总体间的距离来决定。一个样本X与总体G的马氏距离为:
⑺
S为样本协方差阵,S={(X-E[X])(X-E[X])T}。
本文的特征为(RI、RS、I),事先准备好训练数据(正负样本的特征向量和对应的标签),输入一个测试样本X,计算X到G1的距离d1和G2的距离d2。若d1>d2,测试样本X离G2更近,属于G2;否则属于G1。
对原灰度图I进行反射光消除处理流程如下。
3 实验
本文的马氏距离与WeiZhang等人提出的马尔科夫随机场(MRF)方法进行对比,利用夜间行车视频作为测试样本,检测结果及时间复杂度如表1。
4 结束语
本文提出的利用梯度特征及马氏距离判别法的前车灯检测算法,利用车灯与地面反光在梯度特征上的差异性特点,并利用马氏距离判别法能进行快速准确分类的特性,解决了已有算法对于检测车灯与消除反光问题在检测率和实时性上存在的问题。实验表明,在不同的亮度场景下的车灯检测,本文提出的算法具备更优的亮度适应性和实时性能。
参考文献(References):
[1] Cucchiara, R. and M. Piccardi. Vehicle Detection under Day and Night Illumination,1999.
[2] Chen, Y.E.A., A Real-Time Vision System for NighttimeVehicle Detection and Traffic Surveillance. IEEE Transactions on Industrial Electronics,2011:2030-2044
[3] Alcantarilla, P.F., et al. Night time vehicle detection fordriving assistance lightbeam controller. in Intelligent Vehicles Symposium,2008 IEEE,2008.
[4] Guo, J., et al., Preceding Vehicle Detection and TrackingAdaptive to Illumination Variation in Night Traffic Scenes Based on Relevance Analysis. Sensors,2014. 14(8):15325-15347
[5] Niknejad, H.T., et al. Vehicle detection and tracking atnighttime for urban autonomous driving.in proceedings of International Conference on Intelligent Robots and Systems(IROS),2011:4442-4447
[6] Zhang, W., et al., Tracking and Pairing Vehicle Headlight in Night Scenes. IEEE Transactions on Intelligent Transportation Systems,2012.13(1):140-153
猜你喜欢
浙江建筑(2022年6期)2022-12-31
大科技·百科新说(2022年6期)2022-05-30
物理与工程(2021年1期)2021-03-19
上海节能(2020年11期)2020-12-07
山西大同大学学报(自然科学版)(2020年1期)2020-04-02
物理与工程(2017年1期)2017-03-23
艺术科技(2016年9期)2016-11-18
人民交通(2015年8期)2015-12-02
安徽文学(2015年8期)2015-09-10
物理通报(2010年1期)2010-03-21