基于Adams的棉田残茬废膜收集打捆机分析
2018-03-28 00:49张爱民廖培旺刘玉京
农机化研究 2018年3期
张爱民,廖培旺,李 伟,刘玉京
(滨州市农业机械化科学研究所,山东 滨州 256600)
0 引言
黄河三角洲棉区是中国重要的棉花种植区之一,地膜覆盖种植技术因能够大幅提高农作物的单产而被广泛应用[1]。2015年,山东棉区种植面积已达51.6万hm2,占全国植棉面积的13.6%[2],2003-2012年,10年内棉田累计投入地膜25万t以上 ,20年以上棉田的土壤地膜残留量为18.84~53.53 kg/hm2。而黄河三角洲地区是山东省的棉花主产区,其种植面积超出全省的1/3[3]。残膜积累在土壤中,不仅会严重影响棉花产量,还会影响农机具的田间作业质量[4-5]。因此,必须采取措施将残留在地里的残膜回收。目前,回收残膜的方法主要有人工和机械两种。由于人工回收存在劳动强度大、效率低等问题,因此目前我国普遍使用机械回收的方式回收残膜。
目前,中国已经研制了多种残膜回收机具,根据回收时间的不同可分为3类:苗期残膜回收机械、秋后残膜回收机械和播前残膜回收机械[6]。由于棉花采摘后,当年的地膜不仅在地表残留比较完整而且强度也比较高,因此秋后是残膜回收的最佳时机[7-10]。用于秋后残膜回收的机械有很多种。由新疆农业科学院农业机械化农业机械化研究所研制的1SM-1.8(2.0)型牵引式棉田残膜回收机将回收的残膜收集到残膜收集箱内,后期处理和运输不方便[11]。由新疆农业大学机械交通学院研制的钉刺式残膜回收机不能够把埋在地里的根茬一起回收[12]。
针对上述问题,本文提出了一种能将残膜和根茬一起回收并打捆的棉田残茬废膜收集打捆机。该机主要用于秋后残膜的回收,并能将废膜(当年的新膜和往年的大部分旧膜)和埋在地下的根茬一起回收并打捆。
1 结构和工作原理
1.1 结构
由滨州市农业机械化科学研究所研发的棉田残茬废膜收集打捆机主要由限深地轮、悬挂机架、变速箱及传动机构、残茬废膜清理齿辊、挑膜齿、刷膜轮、松土铲、导流板、圆捆机及护罩等组成,如图1所示。
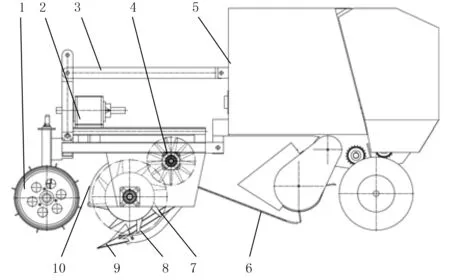
1.限深地轮 2.变速箱及传动机构 3.悬挂机架 4.刷膜轮 5.圆捆机 6.导流板 7.残茬废膜清理齿辊 8.挑膜齿 9.松土铲 10.护罩 图1 棉田残茬废膜收集打捆机结构示意图Fig.1 Schematic diagram of structure of cotton stubble collecting waste film bundling machine
1.2 工作原理
棉花残茬废膜收集打捆机采用三点悬挂方式与拖拉机连接。工作时,动力经拖拉机输出轴传递给变速箱,经变速箱变速后分别由侧输出轴传递给残茬废膜清理齿辊和刷膜辊,由后输出轴传递给圆捆机;限深地轮上的带刃齿板在滚动过程中将地膜埋边切断,松土铲入土10cm,通过正对行膜边覆土位置,将边膜与外侧覆土有效分离,同时残留在土壤里的残茬与土壤分离;残茬废膜清理齿辊在转动的过程中将废膜和残茬同时挑起,被残茬废膜清理齿辊带动沿顺时针方向移动,移动过程中土壤分离下落;残茬和残膜移动至刷膜轮位置被刷膜轮刷到导流板上,最后残茬和残膜沿导流板进入圆捆打捆机进行打捆。
2 理论分析
2.1 残茬废膜清理齿辊和刷膜轮的转速比分析
在机具工作过程中,残茬废膜清理齿辊上的挑膜齿板入土20mm,在机具以一定速度前进的同时,残茬废膜清理齿辊和刷膜轮的转向如图2所示。由图2可知:要想让挑起的残茬和废膜每次都能从残茬废膜清理齿辊上的挑膜齿板上刷下,残茬废膜清理齿辊上的挑膜齿板和刷膜轮上的齿必须在A处“啮合”。因此,为了使两者能够始终在A处“啮合”,必须保证残茬废膜清理齿辊和刷膜轮具有一定的转速比。
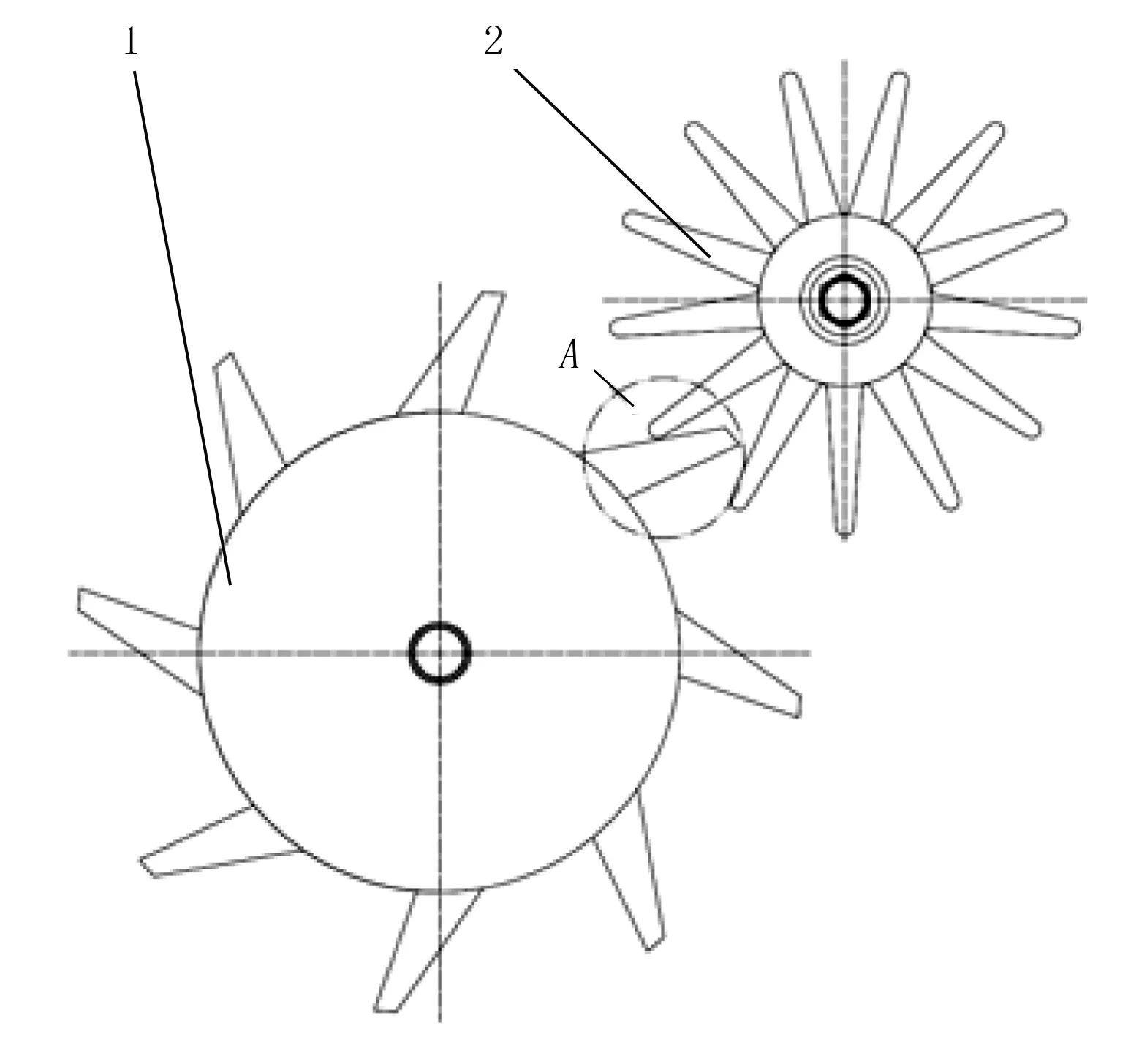
1.残茬废膜清理齿辊 2.刷膜轮 图2 挑膜和刷膜示意图Fig.2 Schematic diagram of picking the film
由圆周旋转的线速度公式V=πrn/30(r为旋转圆周的半径,n为旋转圆周的转速),可分别得到残茬废膜清理齿辊上的挑膜齿板和刷膜轮上的齿的线速度,再由弧长公式L=2πr/z(z为齿数),可分别得到残茬废膜清理齿辊上相邻两个挑膜齿板和刷膜轮上相邻两个齿的长度,最后由公式T=L/V,可分别得到残茬废膜清理齿辊上相邻两个挑膜齿板和刷膜轮上相邻两个齿到达A处的时间。
因始终在A处“啮合”,所以残茬废膜清理齿辊上的相邻两个挑膜齿板和刷膜轮上相邻两个齿到达A处的时间T相等。最终,推出残茬废膜清理齿辊和刷膜轮的转速关系为
(1)
式中n1—残茬废膜清理齿辊的转速(r/min);
z1—残茬废膜清理齿辊的齿数;
n2—刷膜轮的转速(r/min);
z2—刷膜轮的齿数。
2.2 残茬废膜清理齿辊齿尖的运动轨迹分析
残茬废膜清理齿辊的结构图如图3所示。

图3 残茬废膜清理齿辊的结构图Fig.3 Structure diagram of waste-film-cleaning-tooth-roller
因该残膜回收机是由拖拉机牵引前进,因此残茬废膜清理齿辊自身在做匀速圆周运动的同时,还随拖拉机向前行走。因此,残茬废膜清理齿辊齿顶点C处的运动方程为
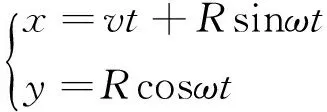
(2)
式中v—拖拉机前进速度;
t—机具运动时间;
ω—残茬废膜清理齿辊的角速度;
R—残茬废膜清理齿辊齿顶点C到辊子中心的距离。
残茬废膜清理齿辊齿顶点C处的运动轨迹L1如图4所示。
3 基于Adams的运动学和动力学分析
分析可得,在残膜回收机具中挑膜部件和脱膜部件是最关键的部件[13]。因此,本章节主要利用Adams虚拟样机技术对残茬废膜清理齿辊和刷膜轮进行运动学分析。又因为在残膜回收机具中挑膜部件是主要的受力部件,因此利用Adams虚拟样机技术对残茬废膜清理齿辊进行动力学分析。
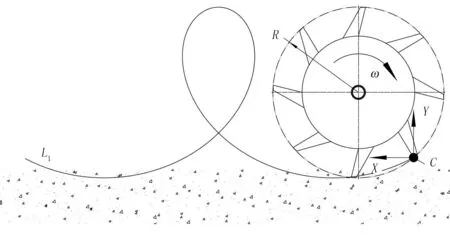
图4 残茬废膜清理齿辊齿的运动轨迹Fig.4 Trajectory of tooth of waste-film-cleaning-tooth-roller
对挑膜和刷膜部件利用SolidWorks建模[14],然后导入Adams中,定义约束和驱动,得到如图5所示的Adams分析模型。
3.1 运动学分析
3.1.1 残茬废膜清理齿辊和刷膜轮齿数分析
选取残茬废膜清理齿辊的一个齿和在刷膜轮上与这个“啮合”的一个齿,并分别在这两个齿的外部建立
标记点POINT_M点和POINT_N点作为研究对象。由理论分析可知,残茬废膜清理齿辊和刷膜轮的转速应与相应的齿数成反比。
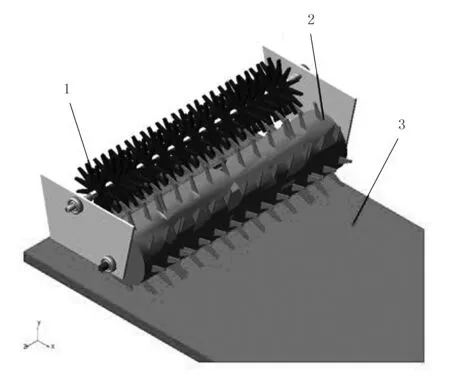
图5 Adams分析模型Fig.5 Adams analysis model
设刷膜轮的齿数为13个,残茬废膜清理齿辊的齿数为8个,因此选取残茬废膜清理齿辊和刷膜轮的角速度分别为1 300°/s和800°/s。分别得出POINT_M点和POINT_N点随时间变化的位置图,如图6所示。
设刷膜轮的齿数为8个,残茬废膜清理齿辊的齿数为13个,因此选取残茬废膜清理齿辊和刷膜轮的角速度分别为800°/s和1 300°/s。分别得出POINT_M点和POINT_N点随时间变化的位置图,如图7所示。
分析图6和仿真过程可知:当残茬废膜清理齿辊的转速比刷膜轮的转速大时,刷膜轮齿到达起始位置要滞后残茬废膜清理齿辊齿到达起始位置,这样容易导致还没到达“啮合”点A处(见图2)时,残茬废膜清理齿辊齿上的残膜就在B处被挂在刷膜轮齿的上端(见图8),最终导致脱膜困难。

图8 挑膜和刷膜示意图Fig.8 Schematic diagram of picking the film and brushing film
分析图7和仿真过程可知:当残茬废膜清理齿辊的转速比刷膜轮的转速小时,刷膜轮齿到达起始位置要超前残茬废膜清理齿辊齿到达起始位置,这样能够使残茬废膜清理齿辊齿上的残膜在“啮合”点A(见图2)处被刷膜轮刷下。
综上所述,因为残茬废膜清理齿辊和刷膜轮的转速应与相应的齿数成反比,又因为残茬废膜清理齿辊的转速必须比刷膜轮的转速小时残膜才能被顺利的刷下来,因此残茬废膜清理齿辊的齿数应该大于刷膜轮的齿数,即z1>z2。
3.1.2 残茬废膜清理齿辊的运动轨迹验证
通过Adams分析模型,验证理论分析的残茬废膜清理齿辊齿的运动轨迹是否正确。同样,在Adams分析模型中标记如图4所示的C点,通过仿真分析,得到C点的运动轨迹如图9所示。

图9 残茬废膜清理齿辊齿的运动轨迹Fig.9 Trajectoryof tooth of waste film cleaning tooth roller
通过观察图4和图9可知:理论分析的残茬废膜清理齿辊齿的轨迹与Adams分析模型的仿真结果是一致的,因此可得出残茬废膜清理齿辊齿的运动轨迹是正确的。
3.2 动力学分析
棉田残茬废膜收集打捆机的动力选择约翰迪尔的N850拖拉机,该拖拉机的行进速度为3~27.9km/h。通过Adams分别分析拖拉机行进速度和残茬废膜清理齿辊的转速对残茬废膜清理齿辊齿与地面的碰撞力的影响。
3.2.1 拖拉机行进速度对碰撞力的影响
保持残茬废膜清理齿辊的转速不变,利用函数step建立拖拉机行进速度函数为[15]
833+step(time,0.1,0,0.101,1000)+step(time,0.2,0,0.201,1000)+step(time,0.3,0,0.301,1000)+step(time,0.4,0,0.401,1000)+step(time,0.5,0,0.501,1000)+step(time,0.6,0,0.601,1000)+step(time,0.7,0,0.701,917)
选择仿真时间为0.72s,仿真结果如图10所示。在图10中,实线代表拖拉机的行进速度,虚线代表残茬废膜清理齿辊齿所受的碰撞力。
分析图10和仿真过程可知:在残茬废膜清理齿辊齿入土时受到的碰撞力大,入土之后拖拉机的行进速度对碰撞力的影响很小,因此在考虑碰撞力时可忽略拖拉机行进速度对其的影响。
3.2.2 废膜清理齿辊的转速对碰撞力的影响
保持拖拉机行进速度不变,利用函数step建立残茬废膜清理齿辊的转速函数为
800+step(time,0.1,0,0.101,1000)+step(time,0.2,0,0.201,1000)+step(time,0.3,0,0.301,1000)+step(time,0.4,0,0.401,1000)+step(time,0.5,0,0.501,1000)+step(time,0.6,0,0.601,1000)+step(time,0.7,0,0.701,1000)
选择仿真时间为0.72s,仿真结果如图11所示。图11中,实线代表残茬废膜清理齿辊的转速,虚线代表残茬废膜清理齿辊齿所受的碰撞力。

图10 行进速度对碰撞力的影响Fig.10 Affect advance speed speed of collision force
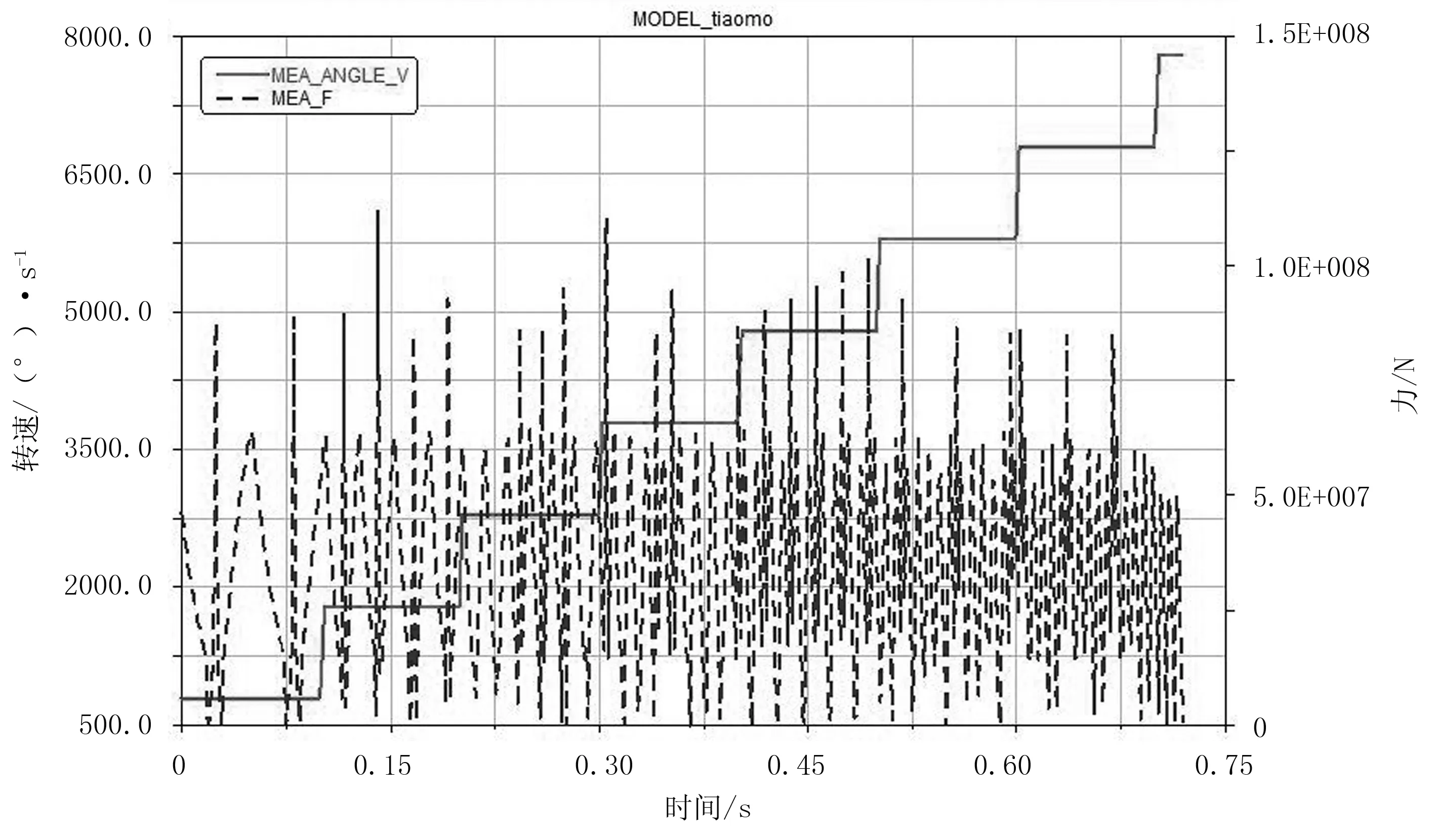
图11 转速对碰撞力的影响Fig.11 Affect the speed of collision force
分析图11和仿真过程可知:残茬废膜清理齿辊的转速对碰撞力的影响要比拖拉机行进速度的影响大很多,且这个影响是折线式的影响。
综上所述,在研究残茬废膜清理齿辊齿的碰撞力时,主要考虑因素因为残茬废膜清理齿辊的转速,可忽略拖拉机行进速度的影响。
4 结论
1)该棉田残茬废膜收集打捆机一次性完成残茬、废膜清理、输送和打捆,打捆后便于收集和运输,能够有效防止堆放于田间地头的残膜被大风吹散造成二次污染。
2)该机具残茬废膜清理齿辊和刷膜轮的转速与齿数成反比关系。
3)该机具残茬废膜清理齿辊的齿数必须大于刷膜轮的齿数。
4)分析得到了该机具的残茬废膜清理齿辊齿的运动轨迹。
5)影响残茬废膜清理齿辊齿与地面的碰撞力主要因素是残茬废膜清理齿辊的转速,拖拉机行进速度对其影响很小。
[1] 张东兴.残膜回收机的设计[J].中国农业大学学报,1999,4(6) :41-43.
[2] 毛树春,李付广.当代全球棉花产业[M].北京:中国农业出版社,2016:545-549.
[3] 李丽霞,王智华.黄河三角洲地区棉田地膜残留特征研究[J].山东农业科学,2016,48(6 ):84-87.
[4] 侯书林,胡三媛,孔建铭,等.国内残膜回收机研究的现状[J].农业工程学报,2002,18(3):186-190.
[5] 沙吾列,居马汉.有关残膜回收技术的分析探讨[J].农村牧区机械化,2012(3):23.
[6] 李明洋,马少辉.我国残膜回收机研究现状及建议[J].农机化研究,2014,36(6):242-244.
[7] 曹肆林,王序俭,沈从举,等.残膜回收机械化技术的专利技术研究[J].中国农机化,2009(4):48-50.
[8] 于云海,陈学庚,温浩军.秸秆粉碎与残膜集条联合作业机的研制与试验[J].农业工程学报,2016,38(24 ):1-6.
[9] 张学军,吴成武,王旭东,等. 残膜分离筛机构的运动仿真与分析[J]. 农业工程学报,2007,23(7):113-116.
[10] 李斌,王吉奎,胡凯,等. 残膜回收机顺向脱膜机理分析与试验[J]. 农业工程学报,2012,28(21):23-28.
[11] 刘旋峰,张丽,郭兆峰,等. 1SM-1.8(2.0)型牵引式棉田残膜回收机[J]. 新疆农机化,2015(3):13-16.
[12] 靳伟,张学军,李超新.钉刺式残膜回收机的设计及试验研究[J]. 中国农机化学报,2014,35(4):55-57.
[13] 周新星,胡志超,严伟,等.国内残膜回收机脱膜装置的研究现状[J].农机化研究,2016,38(11):263-267.
[14] 王敏,王宏,等.SolidWorks2012机械设计完全自学手册[M].北京:机械工业出版社,2013:56-87.
[15] 郭卫东,李守忠,马璐.ADAMS 2013应用实例精解教程[M].北京:机械工业出版社,2015:88-94.
猜你喜欢
舰船科学技术(2021年5期)2021-07-03
小学生学习指导(高年级)(2021年3期)2021-04-06
今日农业(2020年16期)2020-12-14
环球时报(2020-03-30)2020-03-30
中国金属通报(2020年23期)2020-03-15
农家书屋(2019年4期)2019-03-16
今日农业(2019年4期)2019-01-04
今日农业(2019年5期)2019-01-03
数学大王·中高年级(2018年6期)2018-07-05
中西医结合心血管病电子杂志(2016年27期)2017-06-20