
手机和Matlab相结合测量牛顿环的曲率半径
2018-03-27 05:09张晓旭吴天安
物理实验 2018年3期
张晓旭,吴天安,李 达
(信息工程大学 a.理学院;b.指挥军官基础教育学院,河南 郑州 450001)
牛顿环干涉测量透镜的曲率半径实验是大学物理实验中重要的实验之一,一般采用移测显微镜测量数据,不但费时费力,还会由于视觉疲劳引起条纹位置和计数错误. 为了提高效率,在不影响测量精度的情况下,已有研究者将CCD图像采集和软件图像处理应用到该实验中[1-4]. 在实际教学中,软件采集数据的高度自动化对学生综合动手能力培养不足,没有达到应有的教学效果;CCD图像采集的硬件条件并不是每所学校都具备. 为此,笔者设计了将手机和Matlab相结合测量牛顿环曲率半径的方法. 该方法利用手机拍摄牛顿环干涉图像,借助Matlab软件对图像进行分析和处理,实验效果较为理想.
1 实验原理
1.1 牛顿环干涉原理
将曲率半径R很大的平凸透镜的凸面放在光学平板玻璃上,凸面和平板玻璃相接触,构成牛顿环干涉装置. 当用平行的准单色钠光垂直照射时,在空气膜上表面反射的光束和下表面反射的光束在膜上表面相遇,形成以接触点为圆心的明暗相间的环状干涉图样,称为牛顿环干涉图样.
1.2 牛顿环干涉图像
实验采用牛顿环曲率半径的理论值为R0=1.000 0m,钠光波波长λ=589.3nm. 实验采用成像效果良好的JCD型移测显微镜,其视场直径为4.8mm,即当图像充满整个视场时,该圆视场的直径所代表的实际物理距离为4.8mm.
实验借助智能手机拍摄得到清晰的牛顿环干涉图像如图1所示. 智能手机型号为小米note,拍摄像素为宽3 120pixel,高4 160pixel.

图1 智能手机拍摄的牛顿环干涉图像
2 Matlab图像处理
2.1 像素的定标
为真实反映像素和实际物理距离的关系,必须进行定标,一般采用的方法是拍摄游标卡尺的刻度、微尺的刻度或狭缝进行定标[1,3],这将使实验更加繁琐,也会引入不必要的误差. 本文采用显微镜出厂参量视场直径进行定标.
首先对图像进行二值化处理,并调整二值化阈值为0.15(此处设置为0.15的目的在于将拍摄图像的亮圆视场和暗视场分割开),如图2所示. 为反映视场直径像素的大小,进一步做梯度处理,可得到阈值为0.15的直径直方图如图3所示,其中横轴的2代表图1白色亮圆视场的直径,纵轴y代表像素的大小,此时可求出视场直径像素大小为2 604 pixel. 由显微镜视场直径4.8 mm,可求出每个像素所代表的实际物理距离约为0.001 8 mm.

图2 阈值为0.15的二值化图
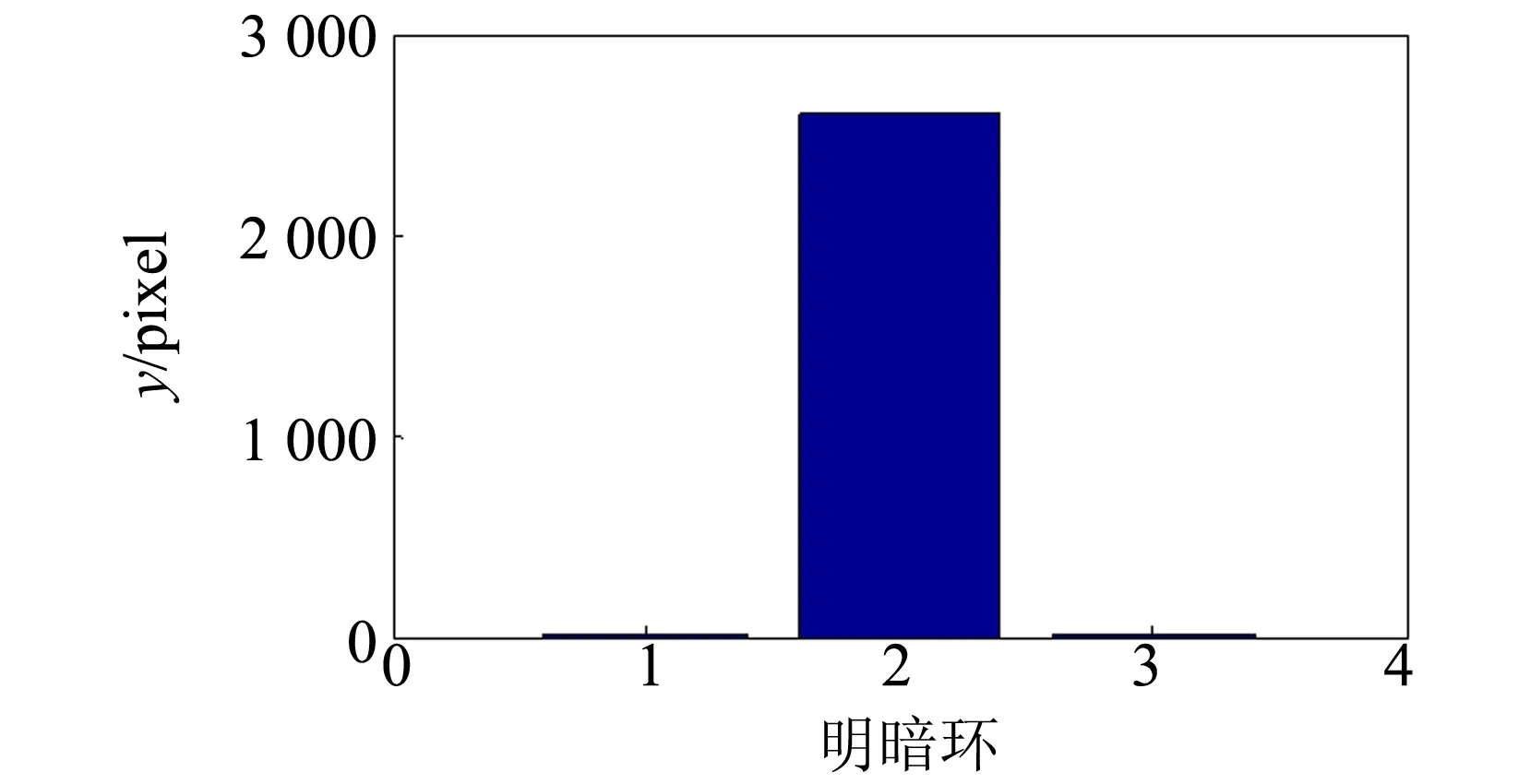
图3 阈值为0.15的直方图
2.2 明暗环像素的大小
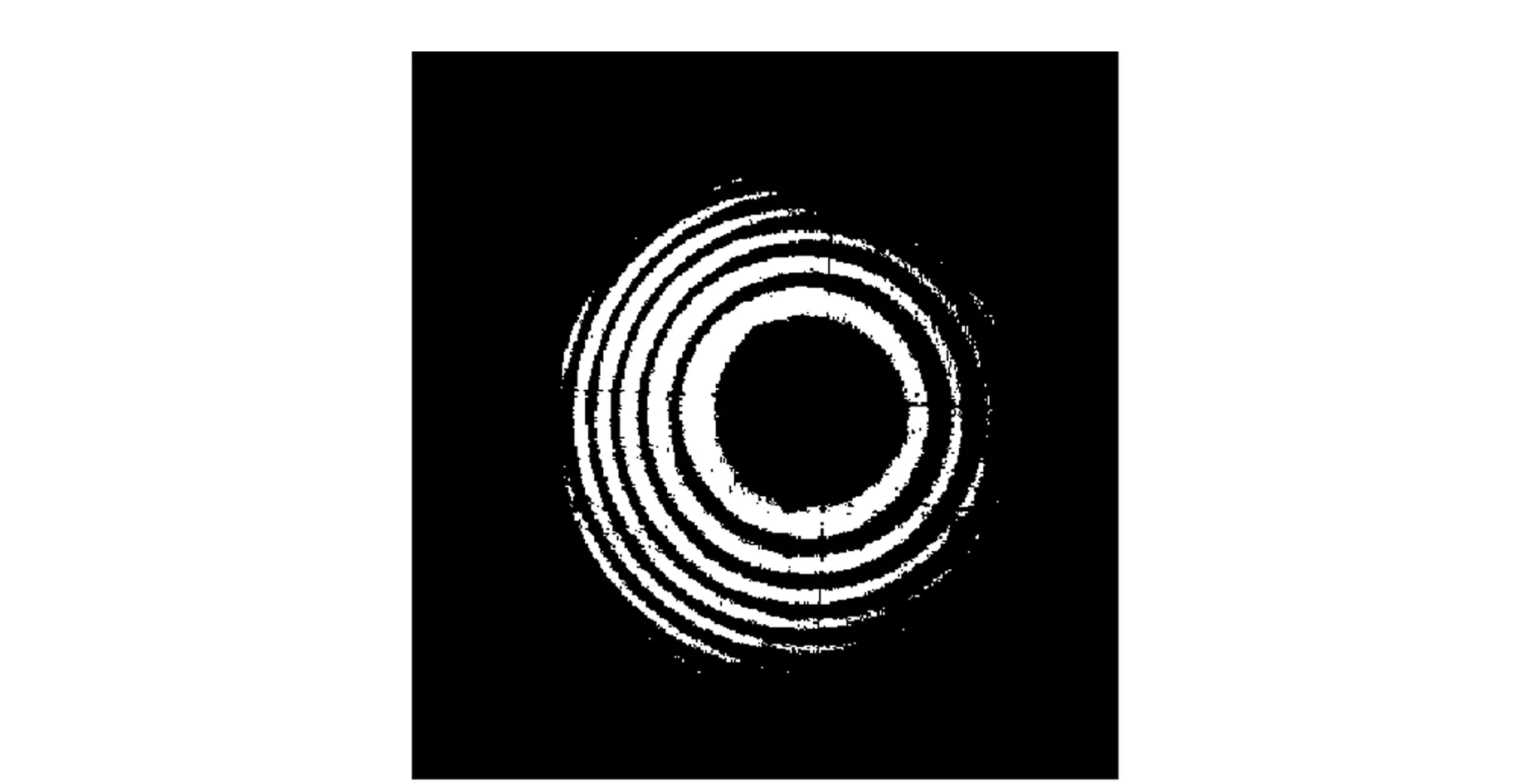
图4 阈值为0.54的二值化图
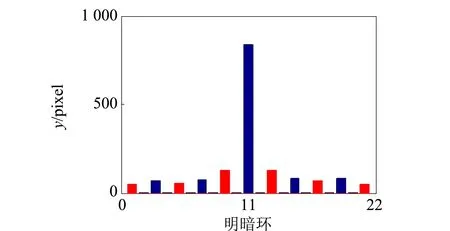
图5 阈值为0.54的直方图
为使二值化处理后的明暗环分开,调整图像二值化阈值为0.54,如图4所示. 从该图可知,手机拍摄导致横向光强分布不均匀,因此在以下讨论中,在纵向测量明暗环的像素大小. 进一步做梯度处理后,可得到图像纵向条纹的直方图如图5所示,其中横轴的11代表中心暗斑的直径,红色代表明环的宽度,蓝色代表暗环的宽度,从中心暗斑处向两侧级次依次升高1,此图给出了最高3级明环和最高2级暗环. 由图5可知第1级和第3级明纹半径像素的大小为:r1=498.5 pixel,r3=795.5 pixel. 由定标可求出第1级和第3级明环半径所代表的实际物理距离为r1=0.919 mm,r3=1.466 mm.
2.3 牛顿环曲率半径的计算
牛顿环装置测量曲率半径R的计算公式为
(1)
其中rm和rn为第m级和第n级明环或暗环半径.
将第1级、第3级的明环半径r1,r3和λ=589.3 nm代入式(1),求出牛顿环曲率半径的Matlab图像处理值为RMatlab=1.108 0 m. Matlab图像处理值和理论值的相对偏差为Er=10.80%.
为将Matlab图像处理值和实验值进行比较,表1给出了利用移测显微镜直接测量图1的第1级和第3级明环半径的实验值.

表1 明环半径的实验值
利用式(1)求出牛顿环曲率半径的实验测量值为R实验=1.087 2 m. 实验测量值和理论值的相对偏差为Er=8.72%. 由此可见,Matlab图像处理值和实验测量值与理论值的偏差基本接近.
3 结束语
利用手机拍摄牛顿环干涉图像,借助现在应用广泛的Matlab软件,利用显微镜视场直径计算出像素和实际物理距离的对应关系,进而完成对牛顿环曲率半径的测量. 在保持原来测量精度的条件下,通过手机和Matlab图像处理技术相结合,可使该实验更适合现今大学的光学实验要求.
[1] 刘崧,戚小平,钟双英. 用CCD成像系统观测牛顿
环[J]. 江西科学,2005,23(4):405-407.
[2] 马力. CCD在牛顿环实验中的应用[J]. 南昌大学学报(理科版),2001,25(4):393-395.
[3] 贺莉蓉,俞嘉隆,余建波,等. 用CCD成像系统观测透射式牛顿环[J]. 物理实验,2005,25(6):38-40.
[4] 朱竹青. 牛顿环实验数据的采集与处理[J]. 物理实验,2002,22(7):10-13.
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
现代电子技术(2022年18期)2022-09-17
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
科学技术创新(2021年25期)2021-09-11
数学物理学报(2019年5期)2019-11-29
小学生学习指导(中年级)(2019年10期)2019-10-08
中国医疗设备(2019年1期)2019-01-15
小学生学习指导(中年级)(2017年4期)2017-03-20
作文与考试·小学高年级版(2016年7期)2016-05-14
