
车联网GPS/SINS组合定位分析研究
2018-03-23 01:00陈闽涛赵红霞杨璟陈永喜
江科学术研究 2018年1期
陈闽涛,赵红霞,杨璟,陈永喜
(江西科技学院信息工程学院,江西南昌 330098)
汽车移动物联网简称为车联网,它将车载导航定位系统、网络信息平台,移动通讯技术及智能终端设备相结合,一方面实现了车与车、车与城市、车与路之间的信息互联互通;另一方面实现了对路、车、位置、人等信息进行全面的管理和监控,目前主要应用于防盗报警、车辆调度、节约能源和医疗救助等方面。
国外对于车联网中车辆盲区定位的研究虽然很早,但是目前在市面上用于解决盲区车辆定位的惯性导航产品,因其功能单一、价格昂贵、不能二次开发,所以无法满足实际需求。而国内在该领域的起步相对较晚。目前,关于车联网中车辆盲区定位的研究在国内还没有形成规模,大部分研究还处在对于基础算法的探索上,还没有形成一套完整的研发与商用体系,还有许多问题亟需解决,比如:寻找出精确度更高的测距方法、解决车辆盲区自主定位时存在的误差积累的问题、解决一些相关定位与通讯设备在应用中的相互串扰与各自损耗问题等。本文根据当前GNSS盲区中的车辆定位要求,重点研究了盲区中车辆自主定位的误差积累问题,提出了一种车联网GPS/SINS相组合的新的定位导航技术。
1 GPS/SINS组合定位的优点
车联网系统的中心部分即车载定位导航系统。而车辆导航定位领域的两大技术分别是捷联惯性导航系统(SINS,strapdown intertial navigation system)和全球定位系统(G PS,globa positioning system)。捷联惯性导航系统(SINS)在丢星条件下运用牛顿第一定律测算出载体在惯性参考系中的加速度信息,然后再对其进行积分变换,从而获得车辆在具体位置的定位参数信息。但SINS因惯性测量平台固定漂移率所产生的误差具有时间累积性无法实现高精度长时间的定位。GPS之所以可提供实时、全天候车辆载体的高精度速度信息和位置信息,且误差不随时间积累,是因为采用测距、多星、髙轨体制。但GPS也有它的缺点,即在隧道和城市高楼等卫星被遮挡区域易受干扰,甚至因丢星而无法定位。因此,结合GPS与SINS系统存在的优缺点,文中提出了一种车联网GPS/SINS相组合的新的定位导航技术。令惯性导航系统(INS)和卫星导航系统(GPS)相互组合可扬长避短,发挥各自的优势,弥补各自的缺点。总结起来两者组合的优点主要体现在如下几个方面:
1.1 提高可靠性正确性
众所周知,捷联惯性导航系统(SINS)的系统误差将伴随时间的积累而不断累加,而卫星导航系统的系统误差则不会随着时间的推移而累加,且GPS定位精度较髙,所以当卫星导航系统(GPS)处于有效状态时,可解决捷联惯性导航系统(SINS)的保持系统稳定运行和空中校准的难题。如果GPS信号受到干扰,组合定位系统仍旧可以通过捷联惯性导航系统在较短时间内计算出相对准确的状态、位置、速率等定位信息。因此,组合定位系统的可靠性和正确性一定优于单独使用卫星导航系统或者捷联惯性导航系统。鉴于此,在实际应用中便提出了将SINS设备当中嵌入GPS用户接收机电路板即组合导航一体机的方案,即一方面可以有效节约经济成本;另一方面又可以提髙导航设备的便携性。
1.2 提高输出速度减少校准时间
捷联惯性导航系统(SINS)的初始化时间较长,一般需要十几分钟才能完成,但其比GPS有着更快的导航信息输出速率,并且接收导航信息没有延迟时间;卫星导航系统(GPS)的导航信息的输出速率较慢,一般为1-50HZ且导航信息接收时间一般会拖延0.1~0.5秒钟,而用户接收机的初始化时间一般在2分钟之内。由于航行载体的设计对卫星导航系统的导航数据精确度和系统性能的影响都很大,实时性要求很难达到。因此,有效的结合GPS与SINS系统,一方面可以解决导航信息的接收时延问题,提髙导航信息的输出速度问题;另一方面可以减少系统的初始化校准时间。
1.3 提高抗干扰能力
在GPS和SINS系统的超紧组合可实现GPS用户接收机对卫星星座的实时跟踪,有效地提髙用户接收机抵御外界干扰的能力。
综合上述分析,得出如下结论:将GPS/SINS组合定位导航系统应用于车联网中,一方面解决惯性导航系统随时间积累的误差増长问题,提高车联网系统的精准度;另一方面可使车联网系统的导航定位信息更加实时可靠。
2 GPS/SINS组合定位系统设计
本系统建立了多级客户中心,采用以客户机/服务器结构(C/S)为主、浏览器/服务器结构(B/S)为辅的架构。系统由4部分组成:卫星导航系统(GPS)、车载模块、GPRS网络、车辆网系统服务器.系统如图1所示。本系统采用GPS/SINS组合定位方法,联系相关的数据处理技术、汽车电子技术、电子地图技术等,将GPRS网络作为基本通讯平台,以此有效地监控车载设备返回的数据。
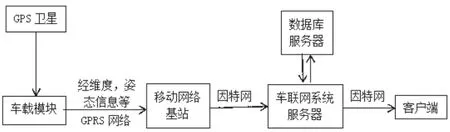
图1 车联网GPS/SINS组合定位系统
该系统的车载模块主要包括语音部分、移动通信终端和GPS终端。语音部分和移动通信网负责实现车辆驾驶人员与服务器中心的实时互动;GPS终端的职能是接收卫星导航系统送出的定位信息,然后计算出车辆的具体位置,最后再通过移动通信部分发送到车联网系统服务器。
2.1 GPS卫星导航系统
GPS可以提供行驶路线监控,车辆定位、防盗、反劫以及呼叫指挥等功能。卫星导航系统(GPS)构成结构如图2所示。包括空间部分、地面控制系统和用户设备3个主要元素。
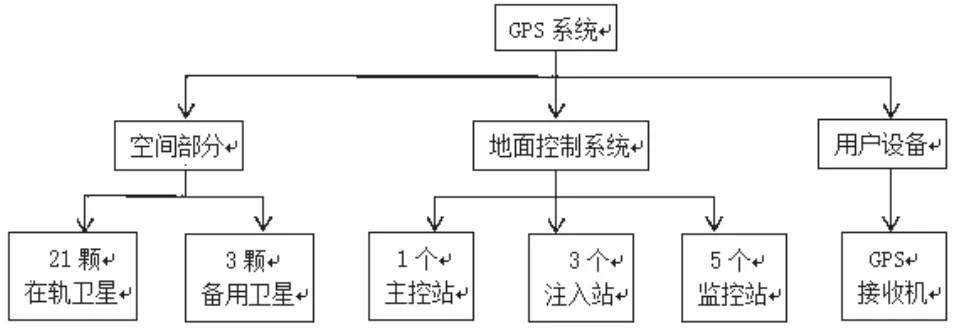
图2GPS卫星系统
该系统中GPS接收机包括主机、电源、天线、图形显示界面和数据处理软件,它是GPS系统的最重要的设备。GPS接收机的主要功能是将接收到的GPS定位信息进行信号放大和变换,并计算出卫星到载体接收机天线的传播时间,最后实时地计算显示出载体的三维位置(经度、高程和纬度)、时间和速度。5个监控站、3个注入站和1个主控站构成了地面控制系统。该地面监控系统的功能包括三个方面:一是监测卫星上的各种装备能否正常运转;二是接收每颗GPS卫星所发送的星历,三是对没有沿着预定轨道运行的卫星进行控制更改。空间部分包括备用卫星3颗、导航的卫星21颗,即总共24颗GPS卫星。该24颗卫星构成GPS卫星星座,它们均匀分布在6个轨道平面内,平均每一轨道平面上分配有4颗卫星,每颗GPS卫星都送出定位信息。
GPS系统利用高轨、多星测距体制,当来自不同方位的4颗卫星发出的星历参数和时间信号到达用户接收机时,先将其进行计算与距离测量,然后再将接收机所在的时间、速度和三维位置显示出来。
2.2 车联网系统服务器
服务器中心的定位系统是整个车联网定位系统能否实现的核心要素。它由车辆调度子系统、信息管理子系统和地理信息子系统组成。(1)车辆调度子系统的功能如下:一是查询车辆位置,并通过监控终端在电子地图上显示出来;二是设置区域报警并在监控终端指挥中心的电子地图上显示相应范围。当区域范围报警设置完成后,一旦车辆离开或进入设置的区域后将发出报警信号;三是调度中心用人工语音或短信息的方式对目标车辆进行实时调度。如果在车辆不受指挥或出现异常,调度中心可以自动对车辆执行遥控指令。除此之外,调度中心不但可以广播的形式同时自动向多台车发出调度命令,还可向单个或部分车辆发送命令,并在车载单元的显示器上显示出来;(2)信息管理子系统的主要功能如下:一是对不同人员访问、操作不同模块的权限进行修改和设置;二是对日常操作如车辆定位、消息接收发送等进行统计、查询等等简单操作;三是对驾驶员信息和车辆信息进行机器化、自动化、智能化管理。(3)地理信息子系统的职能即对地图进行任意开窗漫游、放大、缩小等,调整GIS比例。当图形开窗缩小与放大时,为了使屏幕承载度合理,避免屏幕显示过密,可根据图形缩放比例的不同,显示不同详细程度的地图内容。为了掌控全局,主窗口右下角另开一个小窗口显示全局,显示车辆当前的运动方向、速度和位置,同时主窗口显示放大的局部地图内容。
2.3 GPRS网络
GPS接收器采集到的数据通过GPRS网络与服务器建立连接并进行数据传输。而数据传输过程中需要遵照必要的网络传输协议。因为TCP协议为网络中的各个主机提供面向连接的可靠通讯服务,所以选择TCP协议。
2.4 车载GPS/SINS定位模块
硬件电路和软件设计两部分构成了GPS/SINS组合定位系统。该系统的硬件电路部分主要包括GPS接收模块、加速度传感器、中央处理器、陀螺仪传感器单元等。在丢星的情况下由陀螺仪传感器和加速度传感器实时完成车辆的位置、速度和航向信息采集,经转换后将数据传递给中央处理器进行计算处理。整个系统算法流程如图3所示。
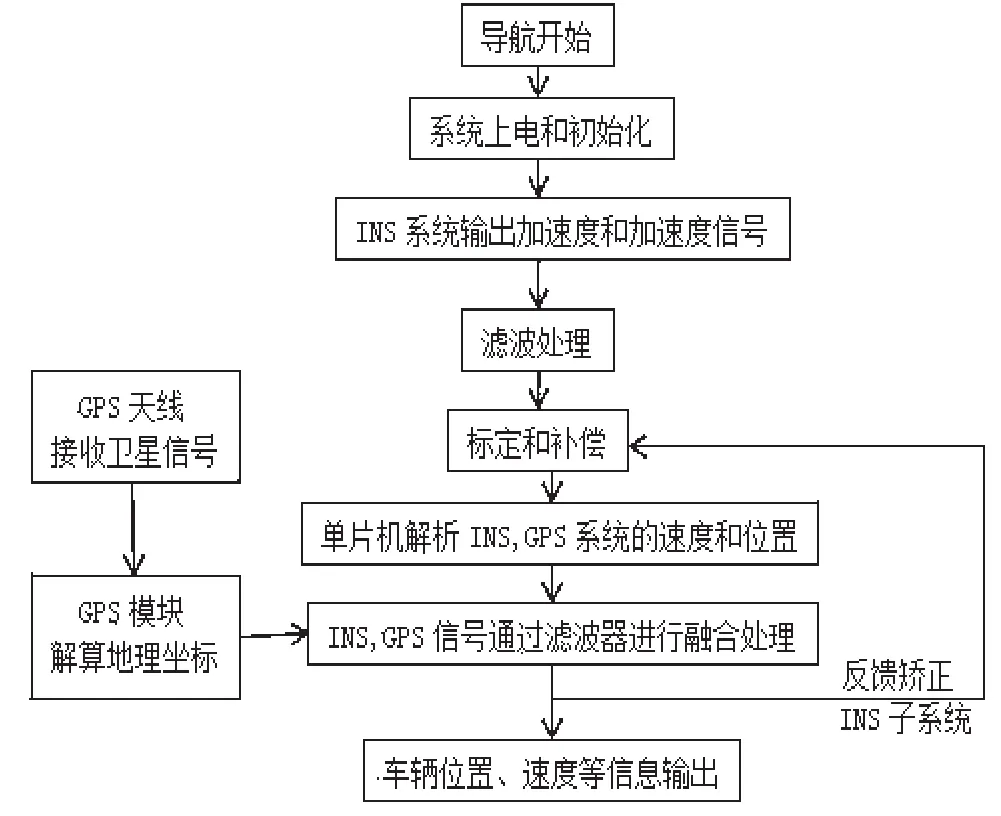
图3 系统算法流程图
3 系统实验
在城市内随机选择某一道路,比如社区小道、主干道和快速道,然后分别使用GPS/SINS组合车辆定位系统和普通GPS定位系统记载沿路位置坐标,然后分别标注在地图上,如图4.1和4.2所示。

图4.1 GPS定位
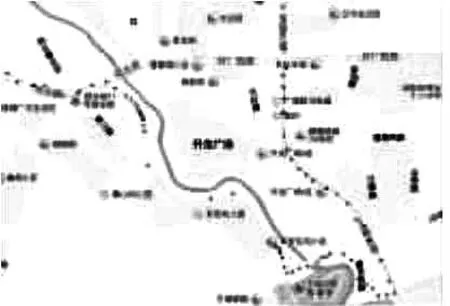
图4.2 GPS/SINS组合定位
通过实验对比可得出结论:对于距离建筑物近的社区小路,如果采取普通GPS定位系统则会出现大量GPS信号丢失,无法准确定位的问题,因此采用组合定位可达到精确定位的要求。
4 结语
本文通过对测试过程中试验车辆的位置信息数据进行提取分析,验证得出GPS/SINS组合车辆定位系统可以得到连续的定位信号,并同时提髙位置信息采集的覆盖率,可以解决城市中由于信号反射和建筑物群遮挡造成的无法连续定位或定位不精确的问题,改进了普通车辆GPS定位系统。鉴于此,本文验证了GPS/SINS组合定位方式可有效地为车联网提供定位信息以及GPS/SINS组合定位技术在车联网系统中应用的适用性。
[1]李兴.GPS/DR/MM车辆组合导航定位系统研究[J].湖北汽车工业学院学报,2014(2):66~69.
[2]Zhu Yi-yun,Liu You-rong.Application of GPS Technology in High Cut Slope SafetyMonitoring[J].Hydro-Science and Engi⁃neering,vol.3,Sep,2016:103~105.
[3]秦永元.惯性导航[M].北京:科学出版社,2014:170~1734.
[4]刘晶璟.采用加速度传感器技术实现盲区定位的研究和开发[J].计算机应用与软件,2015(3):274~277.
[5]Van Dierendonck,A.J.The GPS Navigation Message.GPS Pa⁃pers Published in Navigation,Vol.I,Washington D.C.Insti⁃tute of Navigation,2016.
[6]Chiou Y S,Tsai F,Yeh S C.A Dead-Reckoning Positioning Scheme Using Inertial Sensing for Location Estimation[C].IEEE International Conference on Intelligent Information Hid⁃ing and Multimedia Signal Processing(IIH-MSP),2016:377-380.
[7]丁承君,李根,苑光明等.面向消防、救援、治安的无盲区定位系统的研究[J].天津工业大学学报,2014(01):59-64.
[8]李秀菊.我国交通运输经济发展现状及发展对策[J].中国管理信息化,2014(17):112-113.
[9]Rouhi R,Jafari M,Kasaei S,et.Benign and malignant breast tu⁃mors classification based on region growing and CNN segmen⁃tation[J],ExpertSystemswith Applications,2015,42(3):990-1002.
[10]University of California,Berkeley.Caffe/Deep Learning Framework://caffe.Berkeley vision.org/.2015-10-18.
猜你喜欢
趣味(数学)(2022年4期)2022-07-02
军民两用技术与产品(2021年7期)2021-10-13
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
湖北农机化(2020年4期)2020-07-24
铁道通信信号(2018年12期)2019-01-31
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
资源再生(2017年4期)2017-06-15
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
中国惯性技术学报(2015年1期)2015-12-19
