基于混合学习的工业机器人实践教学模式研究
2018-03-21 01:39刘敬露王国超
实验科学与技术 2018年1期
刘敬露,王国超,杨 晓
(重庆理工大学 工程训练与经管实验中心,重庆 400054)
近年来,随着信息技术的不断发展,网络化教学(E-Learning)在教学领域迅速走红,与传统教学模式相比,其在培养学习者信息素养等方面优势明显。但E-Learning在实施过程中教学监控难度较大,相对忽视了教师的主导作用。鉴于传统教学和网络化教学各有利弊,混合式(B-Learning)教学的概念应运而生。国内首次正式倡导混合式教学概念的是北京师范大学何克抗教授,他的观点是:混合式教学模式把传统教学方式的优势和网络化教学的优势结合起来,既发挥教师引导、启发、监控教学过程的主导作用,又充分体现学生作为学习过程主体的主动性、积极性与创造性[1]。
1 工业机器人应用实践教学
1.1 人才培养必不可少的重要环节
据国际机器人联合会(简称IFR)统计,自2010年开始我国机器人需求量进入高速增长期。2013年我国已取代日本成为世界最大工业机器人销售市场,迄今中国已经连续多年成为全球工业机器人销量最大的国家。
工业机器人自动化生产线成套设备已成为自动化装备的主流及未来的发展方向。工业机器人的普及是实现自动化生产,提高社会生产效率,推动企业和社会生产力发展的有效手段。作为未来智能制造必不可少的基础装备之一,对于普通工科类高校而言,工业机器人实践应用能力的培养已经成为当下人才培养必不可少的重要环节之一。
1.2 软硬件配套均显不足
工业机器人技术涉及的学科相当广泛,归纳起来是机械学和微电子学的结合——机电一体化技术。工业机器人本体及相关成套硬件设备价格不菲,特别是一些有特殊应用需求的工业机器人工作站(柔性线)(如喷涂)更是价格高昂。综合资金投入、场地和使用安全性等一系列因素,目前多数普通工科高校在工业机器人应用实践环节均呈现硬件设备严重不足的情况。
配套软件资源方面,其离线编程软件品牌针对性较强,通用性差,适用于高校的数字化教学资源相对匮乏,教师队伍整体素质还有待进一步提升。
1.3 重在应用,可分层次项目式教学
实践教学是在一定理论指导下,通过引导学习者的实践活动,从而传承实践知识,形成技能,发展实践能力,提高综合素质的教学活动[2]。工业机器人应用实践教学属于实践教学环节,其教学内容的重点在于培养学生利用已有理论知识,应用工业机器人解决生产过程中的问题的能力。本文认为可将高校工业机器人应用实践教学分为以下5个层面[3-4],如图1所示。
1)了解工业机器人的结构、控制原理、软件编程流程;
2)能够操作工业机器人实现预设动作;
3)能够利用离线编程软件模拟工业机器人工艺过程;
4)能够制定工业机器人加工工艺方案;
5)能够制定工业机器人工作站集成配套方案。
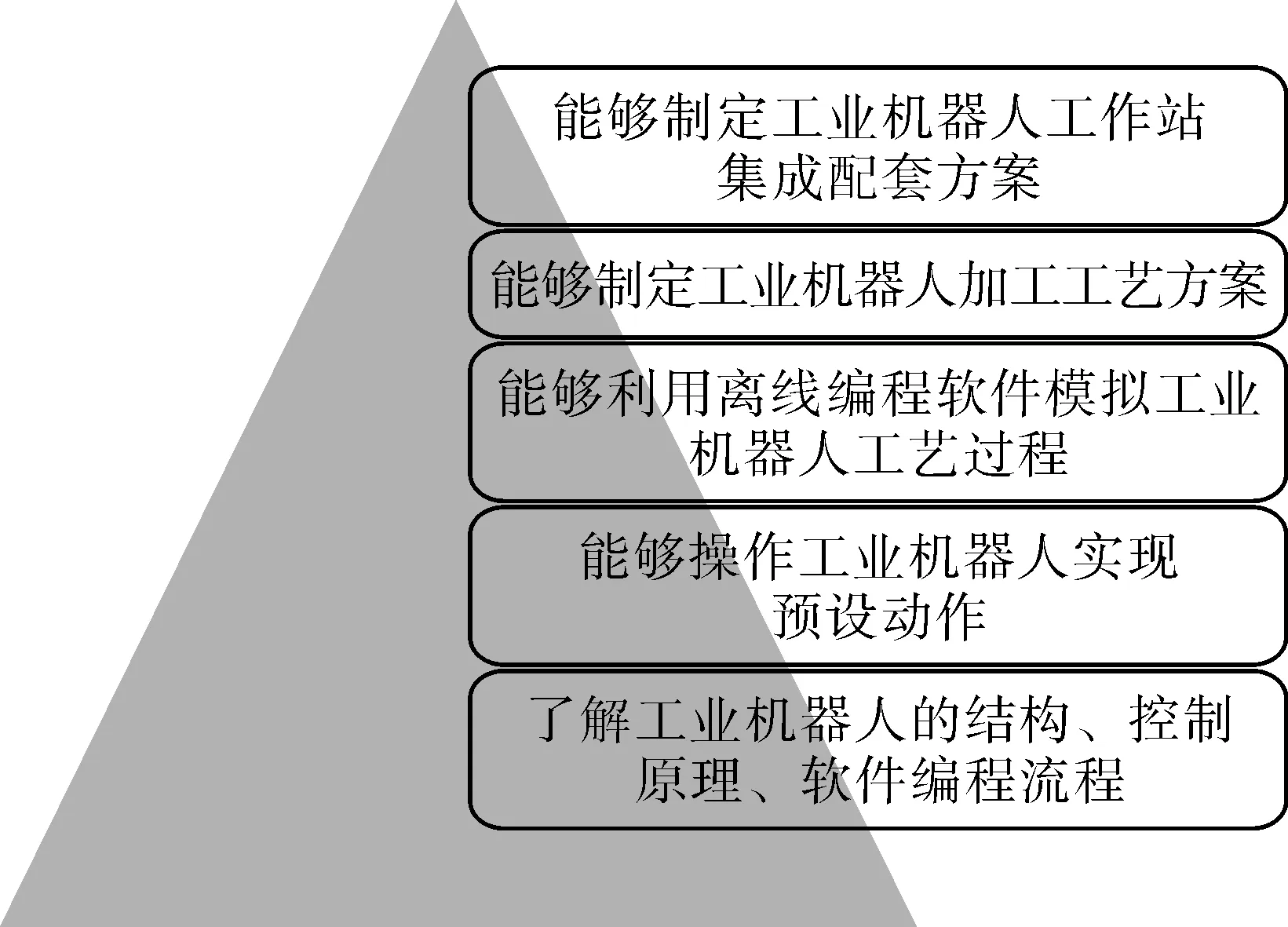
图1 工业机器人应用实践教学层次关系
每个层面都可以分解成若干实训项目进行项目式教学。
2 基于项目的混合式工业机器人应用实践教学模式
2.1 构建混合式工业机器人应用实践教学模式的先决条件
2.1.1 混合式的师资队伍
需要一支兼具一定专业知识、技能水平和教学实践经验的师资队伍,该团队负责制定教学目标,提炼知识点[5],划分实训项目,制作教学视频、课件及其他数字化教学资源。建议挑选工业机器人第三方集成企业进行深度合作,充分结合校内实践课程教师与校外专业技术人员各自的优势,打造一支综合素质较高的师资队伍,首先要实现指导教师队伍上的混合。
2.1.2 交互式的网络教学平台
交互式的网络教学平台是承载数字化教学资源,实现学生在线学习的必备基础。
教师可在网络教学平台上以“项目”为单位制作各类教学资源,并可依据教学对象,将“项目”组合成课程,以支撑不同的教学需求。教学资源的形式可包括PPT、操作视频、文档资料、3D虚拟实验等[6-7]。同样,建议挑选工业机器人第三方集成企业进行深度合作,将教师从繁琐的技术劳动中解脱出来,依据教学需求将第三方集成企业已经制作完成的教学资源进行组织,使其适用于教学“项目”。
学生可通过网络教学平台中的“项目”进行自主学习,并通过平台互动功能与教师或学生进行交流,记录学习及项目完成历程。
2.1.3 必要的硬件条件
工业机器人应用实践教学是实践教学环节,一定的硬件设备是必不可少的,如工业机器人综合实训台、编程室(离线编程软件)等,可依据各学校实训条件和能力建设规划及配备。
2.2 混合式工业机器人应用实践教学模式的基本框架
在具备以上基础条件后,基于项目的混合式工业机器人应用实践教学模式框架构建如图2所示。其中,又可分为集中课堂教学和实训室开放式课堂教学两部分,前者是在集中进行一讲二练三考核的课堂教学的基础上,结合网络教学平台以丰富教学内容;后者则是学习者通过网络自主学习发布的项目后,再进行实训室及教师预约,完成项目操作[8-10]。

图2 基于项目的混合式工业机器人应用实践教学模式框架构建
2.3 混合式工业机器人应用实践教学模式的具体实现
以本校工业机器人应用基础实训为例,教师依据教学大纲将课程内容分割为若干个实训项目,方便教学资源的制作及学生自主学习,具体项目划分如表1所示[11-12]。
表1项目规划示例

项目项目类型工业机器人手动运行基础工业机器人零点标定基础工具坐标系的建立基础工件坐标系的建立基础精确定位和直线运动编程基础I/O信号操作基础复杂曲线编程综合写字练习设计
实训教师依据项目需求,将工业机器人第三方集成企业制作的PPT、操作视频、3D虚拟实训等教学资源与其他数字化教学资源相结合,与企业专业技术人员一起在本校现有实验教学云平台上构建网络教学“项目”资源,并进行平台发布,供学生课外学习。
其中,基础型实训项目学习者如有课程安排,也可选择通过集中实训环节进行学习,并完成考核。其他实训项目均需要学习者首先进行网络平台自主学习后,在平台上进行实训室(设备)或教师预约,然后再进行实践操作并考核。设计型实训项目可以在平台上进行作品发布,从而进一步激发学生学习的积极性。
实践教学环节的考核评价主要还是从实践操作的正确性、规范性以及是否以最优方案解决了项目问题为主,为避免抄袭或拷贝等现象,可以在具体项目的细节上稍作变动。增加课堂或网络交流评价模块,可进行作品展示的设计型实训项目,还可加入作品展示评价模块构成评价标准,使得对学习者的评价相对更加客观和准确。
3 实施效果
同样以本校工业机器人应用基础实训课程为例,目前对表1的前5个基础类项目实施混合式教学取得了良好的教学效果,单个项目在线教学平台教学资源点击量一学期约300次,教师课堂讲授时间比例降低了约60%,相应学生课堂实践应用操作时间得到了增加,项目考核完成情况由之前的50%~70%提升到了90%~100%,具体数据详见表2所示。
表2课堂讲授时间对比

项目实施前/min实施后/min工业机器人手动运行155工业机器人零点标定207~8工具坐标系的建立3010工件坐标系的建立100精确定位和直线运动编程3010
由表中数据可见,进行混合式实训教学,增强了学生的学习兴趣,提高了学生的自主学习能力以及分析和解决问题的能力,真正体现了实践教学环节中学生的主体地位。
4 结束语
混合式(B-Learning)教学作为当今教学改革的重要研究方向,将传统教学与网络化教学进行优势互补,使教师的主导作用和学习者的主体地位在教学过程中都得到了良好的体现。工业机器人应用实践教学环节注重实践动手能力的培养,提倡与社会生产实际紧密结合。基于项目的混合式工业机器人应用实践教学模式在传统混合式教学的基础上,引入了学校教师与企业专业技术人员优势互补的指导师资队伍“混合”思想,首先
从师资队伍建设和教学资源的建设上实现了混合式教学。然后依据实践教学环节自身特点,提出以项目为单位的教学模式框架构建,使学习者可以在项目引导下根据自身需要进行自主学习,突破了传统的一讲二练三考核的灌输式三步实践教学法,体现了教学的层次性,为工业机器人应用实践教学环节教学质量的提升奠定了良好的基础。
[1]何克抗.从Blending Learning看教育技术理论的新发展(上)[J].电化教育研究,2004(3):1-6.
[2]张英彦.实践教学的理论基础探析[J].中国大学教学,2006(6):50-52.
[3]LIU Jinglu,WANG Guochao,YANG Xiao,et al.Research on the construction of industrial robot practical teaching bases in ordinary universities of technologies[C]//Proceedings of the 11thInternational Conference on Modern Industrial Training.Beijing,China:Beijing Institute of Technology Press,2015:718-722.
[4]LI Yanglin,WANG Guochao,YANG Xiao,et al.The exploration of industrial robot teaching in engineering training system[C]//Proceedings of the 11thInternational Conference on Modern Industrial Training.Beijing,China:Beijing Institute of Technology Press,2015:189-193.
[5]张其亮,王爱春.基于“翻转课堂”的新型混合式教学模式研究[J].现代教育技术,2014,24(4):27-32.
[6]胡克满,张臻,胡海燕.虚拟现实技术在工业机器人教学中的应用研究[J].机械工程师,2013(2):77-78.
[7]邵长春.项目式教学在《工业机器人技术》课程中的应用[J].亚太教育,2015(13):127-127.
[8]敖谦,刘华,贾善德.混合学习下“案例—任务”驱动教学模式研究[J].现代教育技术,2013,23(3):122-126.
[9]吴南中.混合学习视域下的教学设计框架重构——兼论教育大数据对教学设计的支持作用[J].中国电化教育,2016(5):18-24.
[10]林雪燕,潘菊素.基于翻转课堂的混合式教学模式设计与实现[J].中国职业技术教育,2016(2):15-20.
[11]叶晖,管小清.工业机器人实操与应用技巧[M].北京:机械工业出版社,2010.
[12]叶晖,何智勇,杨薇.工业机器人工程应用虚拟仿真教程[M].北京:机械工业出版社,2014.
猜你喜欢
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
甘肃教育(2020年14期)2020-09-11
学生天地(2020年15期)2020-08-25
意林·少年版(2020年2期)2020-02-18
劳动保护(2018年5期)2018-06-05
冰雪运动(2018年6期)2018-05-23
海外华文教育(2016年4期)2017-01-20
中国教育技术装备(2016年15期)2016-03-01
成人教育(2015年7期)2015-12-21