全自动运行系统地铁车辆关键技术
2018-03-13 06:19张艳兵徐成永郭泽阔
都市快轨交通 2018年1期
李 猛,张艳兵,徐成永,郭泽阔
(1. 北京城建设计发展集团股份有限公司,北京 100037;2. 北京市轨道交通建设管理有限公司,北京 100068)
1 全自动运行系统概述
根据国际公共交通协会(UITP)的统计数据,截至2016年7月,全球共有37座城市55条全自动运行地铁线路投入运营,总里程达到803 km。运营里程相比2014年增长了14.2%,预计到2025年全球运营里程将增至2 200 km[1-2]。
近期,国内各大城市对于新建城市轨道交通线路是否按全自动运行系统建设和运营进行了热烈而广泛的讨论,讨论的焦点集中在采用全自动运行系统对工程造价及建设工期的影响、全自动运行系统技术的成熟性、全自动运行系统运营管理模式及紧急运营场景应对等方面[3-5]。
目前,国内已经开通运营的全自动运行地铁线路(仅指系统建设自动化等级)包括上海10号线、首都机场线、香港迪斯尼线等。根据最新正在设计、在建的线路情况了解到,北京城市轨道交通建设规划(2016~2021)中的至少4条线路拟采用全自动运行系统进行建设[6],宁波、成都、天津、济南、杭州、哈尔滨、昆明等城市也在近一两年内开始研究应用全自动运行系统。
从国内外目前应用情况及增长数据来看,采用全自动运行系统进行建设的地铁线路相比常规线路具备诸多优势[7],剩下关注的重点在于线路开通运营时采用何种自动化等级进行运营,以及对应的运营管理模式、应对乘客随机性引起意外的处理措施等[8]。
全自动运行系统的发展和应用主要看全自动运行系统技术的成熟度,包括土建系统和设备系统,其设备系统关键技术包括车辆、信号、通信、综合监控等。
全自动运行系统关键技术所起作用如表1所示。
全自动运行系统关键设备包括调度、车站、轨旁、车载等关键子系统,如图1所示。
相对于常规线路,全自动运行车辆系统功能需求和技术存在较多区别[9],技术的产生缘于功能需求和运营场景的改变。本文从 IEC62290规范[10]对全自动运行系统的功能需求出发,对全自动车辆关键技术进行逐一论述。
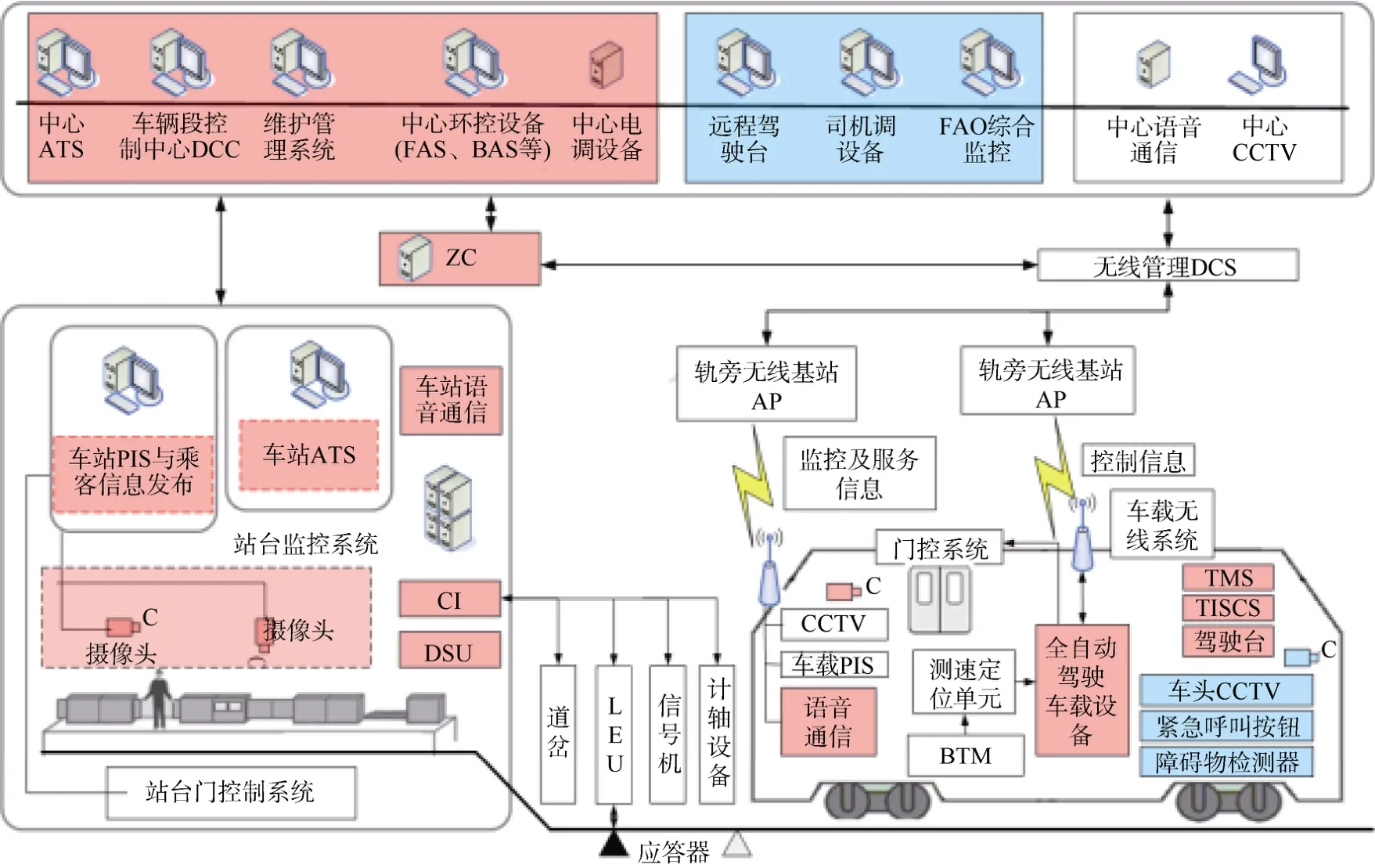
图1 全自动运行系统组成示意Fig. 1 Composition of FAO system
2 全自动运行系统的功能需求
根据IEC62267[11],列车运行的基本功能需求包括确保列车安全运行、驾驶列车、监控轨道、监控乘客上下车、管理列车、确保紧急情况的检测和管理等部分,这些功能需求的实现可由设备系统完成,亦可由人工完成,不同自动化等级(grade of automation,GOA)的运行系统功能完成情况如表2所示。
上述 6种基本功能需求中保证列车安全运行由ATP(列车自动保护)完成,驾驶列车由ATO(列车自动运行)完成,这在目前常规GoA2自动化等级线路中已经实现,下面重点讨论监控轨道、监控乘客上下车、监控列车、紧急状态的检测与处理这4种功能需求下车辆的关键技术。

表2 不同自动化等级下列车运行功能需求Tab. 2 The mandatory basic functions of train operation for a given grade of automation
3 全自动运行车辆职责与关键技术
3.1 监控轨道
3.1.1 车辆职责
早期的城市轨道交通线路一般没有设置站台门系统,这对乘客安全和轨行区安全存在双重隐患。这就要求自动运行的车辆做到两点,一是防止和轨道障碍物碰撞,再是防止和轨道上的人碰撞。
3.1.2 关键技术
基于上述对车辆的需求,车辆需新增障碍物检测装置与脱轨检测装置。当车辆在接收到障碍物、脱轨检测信息后,触发紧急制动,同时将此信息发送至列车控制和管理系统(TCMS),这就引出下列3步:
1)触发紧急制动:车载VOBC收到TCMS汇报的障碍物或脱轨信息后,上传至 TIAS车辆调和行调控制台;同时VOBC输出紧急制动、切除牵引指令;
2)报警信息上传:TIAS车辆调和行调界面进行报警,同时联动区间CCTV,查看现场情况,通知人工到事发地点处理;
3)障碍物/脱轨传感器复位:人工现场清除障碍物,并确认轨道上没有遗留障碍物时,复位障碍物、脱轨检测传感器,人工确认故障解除以及轨道上没有作业人员且具备继续全自动驾驶条件后,车辆、信号自动缓解紧急制动,等待人工按压确认按钮后可以FAM模式发车。
3.2 监控乘客上下车
3.2.1 车辆职责
由于在UTO(无人驾驶)模式中,列车上或者车站没有运营人员监督乘客上下车,在控制乘客上下车方面,必须采取措施降低关闭和开启车门时伤害乘客的风险。在防止乘客在车厢之间或者在列车与站台之间受伤方面,应采取措施降低乘客掉入站台和车厢间或者掉入车厢间连接区而受伤的风险。在确保安全启动条件方面,应采取措施,降低一个或多个车门开着时列车突然启动,或乘客身体某部分或行李被卡在车门中或者站台门中造成乘客受伤的风险。
3.2.2 关键技术
1)基于上述对车辆的需求,在车门/站台门对位隔离方面,包括下列关键技术:
自动发车条件确认:自动驾驶车载VOBC检查以下条件满足后发车:停站计时到时;车门、站台门关闭且锁闭;紧急停车按钮未按下;出站信号开放;区间SPKS开关设置为非防护位;
车门故障提示:当车门发生故障时,对乘客进行提示,车辆通过车载 PA系统触发相对应的隔离车门上方的动态地图 LCD显示器上显示此门不打开的信息并点亮红色指示灯,进行车门隔离故障广播。站台门系统应点亮故障车门对应站台门的故障指示灯;
故障对位隔离:在列车进站停稳后,车载VOBC自动打开车门,故障车门由车辆控制不打开,同时向联锁发送开站台门指令,CI控制打开站台门,故障车门对应的站台门由站台门控制,不打开关闭车门和站台门并发车;
故障信息传递:车辆 TCMS→车载 VOBC→联锁→站台门;站台门→联锁→车载VOBC→车辆TCMS。
根据上面列出的功能需求,车辆需新增车门故障隔离控制装置及TCMS与站台门联锁控制装置。
2)在清客/再关车门控制方面,包括下列关键技术:
发送清客指令:车载VOBC根据电子地图在折返站和终到站(含临时清客站台)停车后,车载VOBC向车辆TCMS发送清客工况指令,并通过硬线给车辆维持发送门使能指令直到清客完成;
自动车辆广播:车辆 TCMS接收到车载 VOBC的“清客”工况指令后,自动触发车辆广播,提醒乘客下车,同时联动车载PIS提示乘客下车;
车站联动处理:TIAS联动车站广播,提醒站台乘客不能上车,同时联动站台PIS提示本站清客,乘客请勿上车;站台人员进行清客完成确认后,关闭车门和站台门。
远程再关车门控制:FAM模式下,车辆调给车载VOBC发送再关门指令,车载VOBC再次发出关门指令;TIAS预留远程再关门功能:联动站台CCTV及车上CCTV人工远程确认可以关门时,通过车辆调下发关门命令,按压站台关闭车门时,仅关闭未关闭的车门,已关闭的车门不再打开重新关闭。
根据上面列出的功能需求,需新增列车远程广播装置及车门防夹精度提示及状态上报装置。
3.3 监控列车/自动化列车运营
3.3.1 车辆职责
由于在 UTO 模式中,在投入/退出运营方面,列车上或车站没有运营人员来准备列车投入运营或退出运营,所以必须采取措施减少对那些需要帮助且滞留在即将退出运营的列车上的乘客造成伤害的风险。在监控列车状况方面,车上或者车站没有运营人员监督列车以便检测故障,应采取措施减小因未发现的列车故障直接或者间接导致事故对乘客造成伤害的风险。
3.3.2 关键技术
基于上述对车辆的需求,在自动列车唤醒/休眠方面,包括下列5个部分的关键技术:1)低压上电/休眠指令接收:通过TIAS远程或人工;2)列车设备自检/整车延时断电:车载各设备对状态进行自检;
3)静调测试、动态测试条件确认:若库内列车满足列车级静态测试和动态测试的条件,执行列车级静态测试和动态测试;
4)自动换端测试/休眠状态测试及上报:一端完成后,自动换端,另一端继续进行列车级静态测试和动态测试;
5)唤醒完成/休眠完成:两端VOBC均动态测试完成且测试通过,VOBC向TIAS汇报唤醒成功总标记,则唤醒成功进入FAM模式待命工况。
根据上面列出的功能需求,车辆需新增车辆自检模块,车辆唤醒模块,辅助驾驶模块以及整车延时断电控制模块4个部分。
3.4 紧急状态的检测与处理
3.4.1 车辆职责
由于在 UTO模式中,列车上或车站没有运营人员来识别车上或站内发生的紧急状况,应采取防护措施降低因未辨识出的紧急状况而对乘客造成伤害的风险。车辆应针对辨识出的危险状况有相应的安全措施,来弥补紧急状况下没有运营人员的情况。值得注意的是,确定的安全措施有时也用在DTO和STO模式。
3.4.2 关键技术
1)基于上述对车辆的需求,在远程故障复位控制方面,关键技术包括远程复位(合闸)和远程旁路两部分。中心车辆调根据TIAS的提示信息人工确认后,采取远程复位和旁路措施。车辆TCMS周期将车辆故障信息、状态信息、里程信息发送给车载VOBC。车辆需新增车载设备复位控制装置,车辆可远程复位设备表如表3所示。
2)在远程紧急制动/呼叫方面,包括下列关键技术:
乘客按下紧急手柄:单车的TCMS采集到手柄被拉下信息,车辆直接施加紧急制动,并同时发送给车载VOBC和车载CCTV实现联动;
触发紧急制动并报警:车载VOBC将紧急手柄拉下信息转发TIAS车辆调,TIAS车辆调显示此信息,并输出报警;车载CCTV将视频信号通过PIS通道将紧急手柄拉下报警区域的画面主动推送给地面乘客调CCTV监视器;

表3 车辆可远程复位设备Tab. 3 Remotely reset device of the vehicle
报警确认并发车:乘客调通过CCTV监视器确认后可通过 Tetra对列车进行广播,并由中心乘客调确认后通知行调可以发车;行调执行发车确认操作;
紧急呼叫功能:客室内设置紧急呼叫按钮,当乘客触发客室内的紧急呼叫按钮后,可与中心调度台通话。
根据上面列出的功能需求,车辆需新增车载广播通信装置以及车载PIS与紧急按钮联动装置。
3)在车辆火灾方面,包括下列关键技术:
火灾检测:车辆通过网络和硬线方式给车载VOBC提供火灾报警信息,同时车辆通过硬线的方式给车载VOBC提供火灾报警信息,车载VOBC将火灾报警上报TIAS。
车辆PIS系统将火灾报警区域的画面推送给地面车辆调、乘客调CCTV监视器和司机台CCTV监视器。
应急反应:停站期间列车发生火灾时,列车打开车门不关闭,疏散乘客。TIAS本站邻线站台提示行调设置跳停。
在区间运行时列车发生火灾,列车不自动打开车门,运行至下一站对标停车,打开车门不关闭,疏散乘客。行调调度员人工设置上下行相邻车站的扣车;行调对相邻区间内正在接近的列车,实施紧急制动。
火灾确认:车载VOBC保持在站台打开车门不关闭状态,待站台人员上车后确认火灾情况(中心可通过 CCTV辅助确认),如确实有火灾,车辆调向车载VOBC发送火灾确认,由车载VOBC触发TCMS预录广播对乘客进行广播,车辆自行触发预录制的PIS信息提示乘客。
根据上面列出的功能需求,车辆需新增火灾探测装置,火灾信息上传装置,火灾信息与PIS联动装置以及远程复位FAS报警装置。
4)在车辆制动系统故障方面,包括下列关键技术:
故障上传:当车辆制动系统故障时,车辆通过MVB网络将车辆的紧急制动损失程度(损失的转向架个数)告知VOBC;
故障信息采集:当VOBC与TCMS网络通信故障后,VOBC将采集制动力故障硬线(制动重故障)输入,如制动力故障硬线输入有效,则输出紧急制动;当网络正常时,VOBC将不采集制动力故障硬线,通过MVB网络获取制动状态;
故障控制:①损失1/8(以4辆动车、8台动力转向架列车为例)转向架紧急制动的时候,列车可以精确停车,维持运行完本次上下行服务后退出运营。车辆采取限速措施(超过70 km/h时切除牵引)并保证可保证的紧急制动率(GEBR)。信号超过该速度后切除牵引,不需要降低牵引和制动率保证精确停车;②损失1/4转向架紧急制动的时候,列车继续运行到站台停车,人工上车,退出FAM模式,须以CM或RM模式驾驶,车辆采取限速措施(65 km/h)并保证GEBR,信号超过该速度后切除牵引;③损失3/8转向架紧急制动的时候,VOBC直接采取紧急制动,等待人工救援(若网络故障,制动硬线汇报有故障,则认为损失3/8以上紧急制动)。
根据上面列出的功能需求,车辆需新增制动系统状态监测装置,制动力损失情况上报装置以及制动力损失信息与限速联动装置。
4 全自动运行车辆的可靠性
4.1 可靠性指标
以北京燕房线为例,列车运营可靠性指标:
1)服务故障:每组车平均无故障时间6 000 h;
2)大晚点故障:每组车平均无故障时间4 500 h;(常规驾驶为3 000 h)
3)碎修、列检故障:每列车平均无故障时间200 h。(常规驾驶为150 h)
另一方面,牵引系统、制动系统、辅助电源系统、通风空调系统、车门系统、TCMS系统具有自诊断功能,可实现系统设备运行状态、故障及操作指令自动信息采集和记录功能,并可将影响运营的故障信息、主要状态信息及能耗记录发送至车载VOBC用以统一记录和显示。
4.2 提高可靠性指标措施
4.2.1 车上设备状态远程检测
车载VOBC系统和车辆TCMS系统通过增加与TIAS、IMS系统的接口,将列车状态、诊断信息汇总到控制中心(车辆调和设备管理系统),强化远程监测功能。车辆TCMS周期将车辆故障信息、状态信息和里程信息发送给车载VOBC。车辆TCMS与地面服务器通道传输车辆故障信息和维护信息。
4.2.2 列车控制与诊断系统自动控制
TCMS故障诊断和监控;增强TCMS的数据记录和传输系统;提升TCMS系统可靠性;TCMS远程安全修复和故障安全自愈技术。
4.2.3 走行部安全监测和故障诊断
车辆走行部若发生严重故障而未及时采取措施,容易造成运营安全事故,比如轴承烧损。
传统车辆走行部监测诊断未实现控车,严重故障应急措施依靠诊断信息和司机人工决策的方式,全自动驾驶车辆需要研究高实时性的走行部故障诊断和自动分级报警决策技术。
严重故障实时报警通过列车网络与调度系统实时远程连接用于监控,从而保障全自动驾驶模式下的车辆运行安全。
4.2.4 采用以太网+MVB双网结构
关键系统均冗余设计,如图2所示。

图2 关键系统均冗余设计示意Fig. 2 Key systems are redundant design
4.2.5 车地通信大数据处理
全自动驾驶车辆的车载子系统和传感器多,需要实时把控制数据、运行状态数据和故障信息实时记录并发送给地面控制中心,为列车的运行和维护检修提供支撑。
1)数据记录要确保数据记录的完整性和实时性。
2)数据记录系统为TCMS通过MVB与各系统进行通信,采用大容量进行记录,记录芯片固化在设备内部,且在列车两端均冗余设置有快速存储器。
3)数据传输系统为TCMS通过MVB和以太网与各系统进行通信,传输TCMS控制信息以及各系统运行数据、故障信息等,并通过校验及安全传输技术确保数据的发送的安全性、准确性。
4)信号系统可通过TCMS反馈数据实时监控关键系统如牵引、制动、车门等关键运行状态,最终实现数据传输系统服务全自动驾驶车辆大数据量处理的需求。
5 结论
1)根据IEC62290的相关规定,全自动运行系统需由设备自动化实现监控轨道、监控乘客上下车、监控列车、紧急情况下的处理等,而车辆是全自动运行系统关键的子系统,本文从车辆需求与职责出发,阐述了全自动运行车辆的关键技术。
2)全自动驾驶车辆在可靠性、可用性、可维护性以及智能化程度方面相对与常规车辆全面性升级。在GoA2模式下,全自动驾驶车辆也具有更高的可用性,可以有效提高整个系统的稳定性。
[1] UITP Statistics Brief. World report on metro automation [EB/OL]. [2017-06-25]http://metroautomation.org/publications/.
[2] UITP Statistics Brief. Metropolitan railways in the world 2014-outlook and focus on automated metro lines. UITP Statistics Brief[EB/OL]. [2017-06-25] http://www.uitp. org/key-statistics
[3] 郭涛. 全自动驾驶地铁车辆安全性需求分析[J]. 交通世界, 2016(31): 118-119.
[4] 周秀梅, 王永华. 城市轨道交通全自动驾驶的发展与思考[J]. 工程技术(引文版), 2016(7): 00024.
[5] 郭涛. 全自动驾驶地铁车辆的运营功能需求初步研究[J].交通世界, 2016(30): 122-123.
[6] 北京市交通委员会关于轨道交通 4条新线采用全自动驾驶系统的批复: 京交函[2015]565号[A]. 北京, 2015.
[7] 张艳兵, 王道敏, 肖衍. 城市轨道交通全自动驾驶的发展与思考[J]. 铁道运输与经济, 2015, 37(9): 70-74.ZHANG Yanbin, WANG Daomin, XIAO Yan. Development and thoughts on full-automatic operation of urban rail transit[J].Railway transport and economy, 2015, 37(9): 70-74.
[8] Karvonen H, Aaltonen I, Wahlström M, et al. Hidden roles of the train driver: A challenge for metro automation[J].Interacting with Computers, 2011, 23(4): 289-298.
[9] 朱蓓玲, 宋键. 全自动无人驾驶车辆功能与特点[J]. 地下工程与隧道, 2005(4): 33-36.
[10] Urban Guided Transport Management and Command/control Systems–Part 1: System Principles and Fundamental Concepts: IEC-62290-1-2004[S]. Institution B S.Railway Applications, 2004.
[11] Automated Urban Guided Transport (AUGT) –Safety Requirements: IEC-62267: 2009[S]. Association J S.2004.
猜你喜欢
汽车工程师(2021年12期)2022-01-17
快乐语文(2021年15期)2021-06-15
公民与法治(2020年21期)2020-11-26
公民与法治(2020年11期)2020-07-25
童话世界(2020年13期)2020-06-15
上海节能(2020年3期)2020-04-13
故事大王(2019年4期)2019-05-14
城市轨道交通(2019年2期)2019-04-04
下一代英才(酷炫少年)(2018年6期)2018-07-09
工程建设与设计(2016年1期)2016-02-27