全自动运行系统发展趋势及建议
2018-03-13 06:19郜春海贾庆东
都市快轨交通 2018年1期
郜春海,王 伟,李 凯,贾庆东
1 全自动运行系统发展概况1
全自动运行(fully automatic operation,FAO)系统:基于现代计算机、通信、控制和系统集成等技术实现列车运行全过程自动化的新一代城市轨道交通系统。如图1所示,国际公共交通协会(UITP)将列车运行的自动化等级(GoA)划分为4级[1]。
GoA3级和GoA4级统称为FAO,正常情况下,GoA 3与GoA 4由设备自动完成各项操作;故障条件下,GoA 3由车上的乘务员处置故障,而GoA 4等级则需由地面派人到车上进行处置。

图1 GoA等级划分Fig. 1 GoA gradation
近年来地铁自动化在全球轨道交通领域日渐升温,巴黎、新加坡、洛桑、迪拜、纽伦堡、哥本哈根等城市地铁都已引入全自动运行系统,目前运行情况良好。根据国际公共交通联合会(UITP)的统计,截至2017年3月份,全球UTO运营线路共56条,里程达到850 km。国外75%新线将采用FAO技术,40%的既有线改造时将采用FAO技术。预计2025年全球将有2 300 km全自动运行线路。
2000年以前,我国城市轨道交通建设相对滞后,轨道交通运营总长度、密度及负担客运比例均远低于世界平均水平,2000年后迅猛发展,截至2016年底,我国城市轨道交通运营总里程已经达到3 687 km。全自动运行系统在客运、维护维修、行车控制方面与既有轨道交通系统相比均有大幅度提升,实现了高可用、高可靠和高安全,是必然的技术发展趋势[2]。目前,我国已有多座城市计划应用,北京后续规划的地铁3、12、17、19号线,新机场线均按照GoA4等级设计,上海、成都、南京、南宁等地也在按照全自动运行设计规划后续部分线路。
鉴于当下我国的轨道交通建设速度迅猛,建设运营模式也随着PPP案例的增加趋于复杂化,如何在如此高速发展的建设和运营过程中,保证并稳步提高服务水平、运营安全和效率等,特别是如何运营全自动运行系统,通过何种运营方式才可以节省人力和成本,成为FAO技术推广应用急需解决的首要任务。
2 自主化全自动运行系统
目前,全自动运行系统仍是少数发达国家掌握的复杂技术,系统综合最佳化全自动运行系统更是极少数国家刚刚开始研究的技术,具有很大的技术挑战性,只有系统地进行研究探索,在核心技术、关键设备、系统设计与集成等方面持续攻关并取得实质性突破,才能实现集成创新,填补国家空白,达到国际领先的地位。因此,研制一套自主知识产权的全自动运行系统,打破国外公司在该领域的技术垄断和技术封锁,提升我国在国际合作中的技术和经济地位,通过示范应用,推动具有自主知识产权的全自动运行系统的国产化、系统化、工程化和产业化发展尤为重要[2-3]。北京地铁燕房线为我国第一条自主研发的全自动运行系统国家级示范应用线。
2.1 工程概述
全自动运行系统国家示范工程——北京地铁燕房线工程由主线、支线两部分组成(见图2),主线长约14.4 km;支线长约6.1 km,初、近期采用4辆编组,信号、综合监控、车辆、通信等全部国产化,已于2017年年底开通试运营。

图2 燕房线线路Fig. 2 Yanfang Line
组织形式由信号系统牵头,组织各专业进行整体的设计、研发、测试,实现全自动运行场景的验证和接口标准化。
2.2 系统概述
应用于北京地铁燕房线示范工程的自主化全自动运行系统,是由7大专业、31个子系统,数十万个驱动采集点组合实现安全高效运输的复杂巨型系统[4]。如图3所示,系统架构分为3层,包括中心系统、车站系统和车载系统,红框标注为相对于传统CBTC系统新增的设备,包括:控制中心增加乘客调、车辆调、维护调;车站增加人员防护和控制开关;车载增加休眠唤醒模块。
各层级设备的功能分工有:中心系统负责监控列车运行和服务乘客;车站系统负责监控站内设备;车载系统负责列车的全自动运行。
全自动运行系统根据列车运行的场景,代替人员操作,由系统根据计划自动触发控制,实现列车上电、自检、段内行驶、正线区间行驶、车站停车及启动、清客、列车回段、休眠断电、洗车等全过程自动控制。整个过程遵循IEC—62267/62290等标准,结合中国轨道交通特点,形成全自动运行场景[5],如图 4所示,共包含41个场景,正常运行场景18个,异常运行场景23个,使得系统自动化水平整体提升,障碍物检测、雨雪模式,车门故障,站台火灾等故障场景下,实现各系统联动的自动处理。
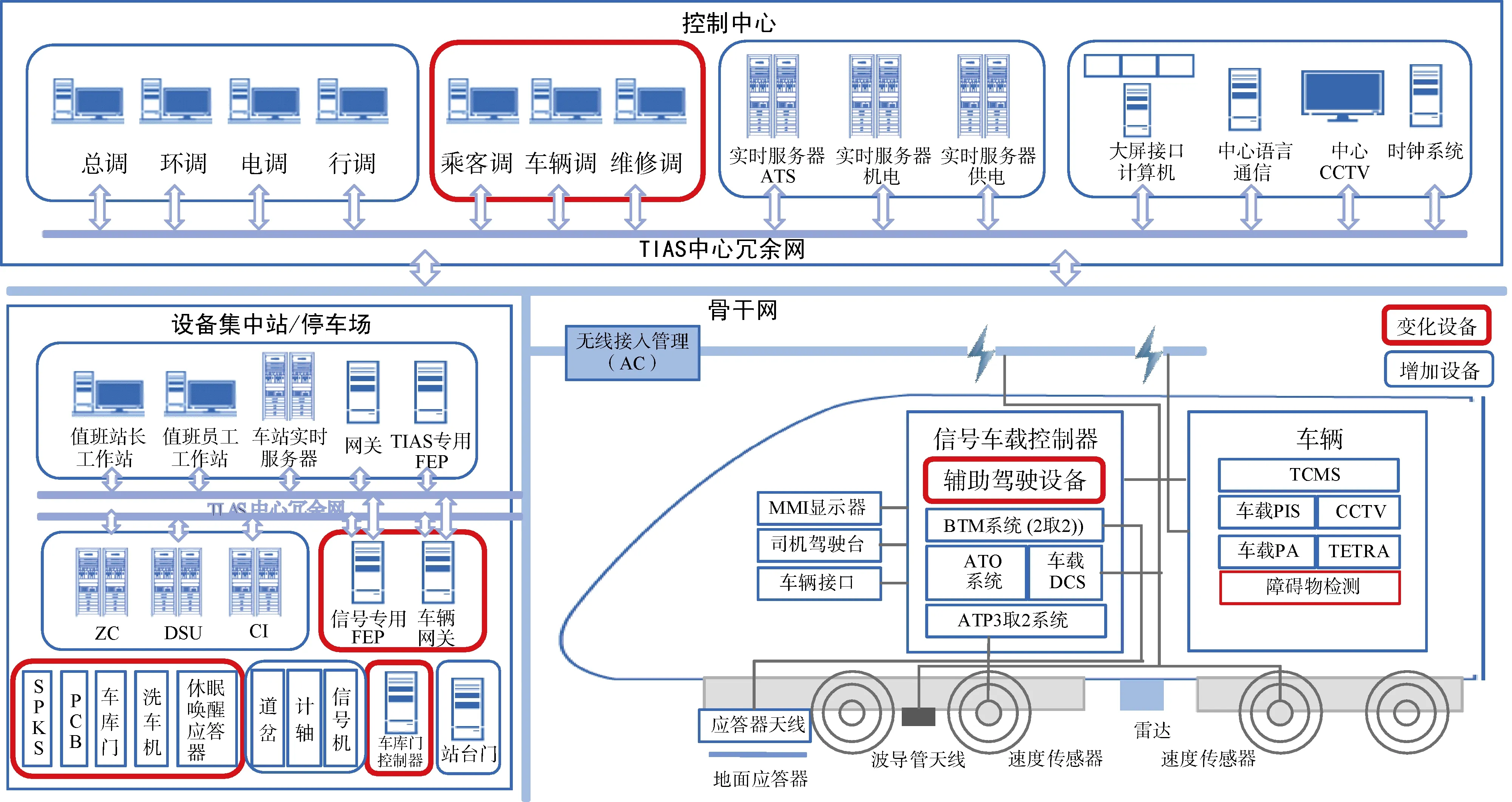
图3 全自动运行系统架构Fig. 3 Architecture diagram of FAO system

图4 全自动运行系统场景Fig. 4 Scene graph of FAO system
2.3 FAO系统与传统CBTC的区别
全自动运行系统不再设置司机,CBTC有人驾驶系统由司机进行操作,在FAO系统中,有计划的操作由系统自动联动控制,需要人工判断或突发情况由中心远程控制完成。全自动系统与传统CBTC的主要区别如下[6]:
1)设备组成:控制中心增加乘客调、车辆调、维护调;车站增加人员防护和控制开关;车载增加休眠唤醒模块。
2)车辆段土建:停车列检库长度增加,实现库内动态测试及自动入库停车;车辆段划分全自动/非全自动区域,增加隔离设施。
3)自动化程度提高:ATS与综合监控深度集成为TIAS,实现综合自动化联动控制;原来由司机操作的功能,转为系统自动实现,包括列车自动休眠、唤醒、全自动运行、全自动洗车等。
4)运营人员职责变化:司机角色转换为乘务员,工作由驾驶列车变为服务乘客;中心增加调度人员,进行远程车辆控制和乘客服务。
全自动运行相对于传统的CBTC系统有更高的性能指标要求,如表1所示。

表1 全自动运行与传统CBTC系统性能指标对比Tab. 1 Comparison of performance between FAO and traditional CBTC system
2.4 小结
FAO系统在国内最早翻译成无人驾驶,或者全自动驾驶系统,通过燕房线的工程实施经验,体会到“全自动运行”系统更能准确地描述FAO系统的内涵。
FAO系统是一套高度自动化的系统,其节省的成本来自于重复性劳动的降低,而非简单地去掉司机,其最有可能优先被优化掉的岗位是类似于信号楼值班员等计划性高、工作重复性高的岗位。诚然,司机的驾驶职责重复度高,但是仍然有很多类似于故障处理等重复度低的工作,这些工作需要通过提高设备可靠性来逐步优化直至可以完全替代,因此“无人驾驶”容易让人产生误解。“全自动驾驶”的翻译来源于ATO译为“自动驾驶”的思路,但是FAO不仅仅是针对列车的,而是包含车站机电设备、电力设备等在内的一系列系统的自动化,因此全自动运行可以确切地阐述FAO系统的内涵。
3 FAO的特点与发展趋势
3.1 自动化程度提高,重复性工作减少
在系统自动化程度上,与非全自动运行线路进行对比分析,全自动运行系统主要解决了以下三大问题[7]:
1)解决多专业高效协同的问题。采用行车指挥为核心的综合监控系统,提供更全面的列车监控、乘客服务、综合维修调度及辅助决策功能,解决了“7个专业、31个子系统复杂交互,各个专业分属不同平台部署,数据不完全共享;各专业中间环节多,应急情况时不能快速及时响应;人机界面多,降低人员监控以及处理的办公效率等问题”。
2)解决车辆段运行效率低的问题。非全自动运行系统,每日发车前需人工上电唤醒列车,人工完成繁琐的日检作业,耗费人力,效率低下;需要人工执行开关列检库车库门的操作;需要司机手动驾驶列车回库,人工驾驶列车进行清扫/洗车作业。全自动运行系统能够自动远程唤醒列车,自动进行静态测试和动态测试,列车自动回库,自动洗车作业,远程休眠列车,自动发车。
3)解决正线自动化程度低的问题。非全自动运行系统下,若ATO未精确停车,需退出ATO模式,司机手动对标;司机需人工执行中心或计划好的清客任务;若某个车门或站台门单独发生故障,不能区别处理;自动折返仍需要司机进行相应操作。全自动运行系统根据列车运行的场景,有计划地操作,由系统自动根据时间触发,需要人工判断或突发情况由中心远程控制。实现列车上电、自检、段内行驶、正线区间行驶、车站停车及启动、清客、端站折返、列车回段、休眠断电、洗车等全过程自动控制。FAO系统可以有效减少重复性工作人员的投入。
3.2 设备可用性提高,损失成本降低
相比于传统的CBTC线路,有些原本由人完成的职责转变为由设备完成,因此全自动运行线路对信号、综合监控、车辆、站台门、通信等系统的技术装备水平提出了更高的要求[8]。通过增加系统自动检测以及闭环验证,解决检测检验手段有限的问题;通过采用设备冗余方案,解决单套设备无法满足FAO系统对设备可靠性要求高的问题。
FAO系统的应用倒逼各设备自身的功能和可靠性变得更为强大,原先系统存在的会降低服务质量但不至于中断运营的故障将会大大减少。如车辆发车前进行30多项上电自检和测试,一项不通过禁止发车,使系统始终处于健康状态。另外,FAO系统的调试周期比传统CBTC长并不是FAO系统的调试复杂度上升了很多,而是传统 CBTC线路各专业系统相对孤立,无法交叉验证,开通时问题暴露不够充分,作为尾工遗留到载客运营阶段,影响运营。在FAO线路系统调试时,系统联调联试大纲覆盖多专业联动场景,问题暴露手段大大提升,极大地减少了尾工遗留的数量,从而保证了系统开通试运营后整体的可用性水平提高。
FAO系统的应用可以倒逼可靠性水平提升,设备可用性大大提高,设备可用性的提高使系统运行更加稳定,损失成本显著降低。
3.3 系统集成度提高,维护成本降低
以行车为核心,信号与车辆、综合监控、通信等多系统深度集成,提升轨道交通运行系统的整体自动化水平。在系统集成度上,与非全自动运行线路相比,全自动运行系统主要解决了以下两大问题:
1)解决统一维护的问题。如采用IMS(综合维修维护系统)可减少信息误报、漏报,获取信息不及时,维护流程繁冗耗时,对用户支持不友好等问题。
2)解决不同需求及场景的应急处理问题。采用云平台构建综合大数据中心,实现智能调整维护库存备件、故障历史数据分析、故障趋势预警、地铁客流拥挤指数,解决维修库存数量不清、故障原因难定位、故障趋势难掌握、地铁客流量变化无法统计等问题(见图5)。

图5 基于大数据的运营维护管理系统Fig. 5 Operation and maintenance management system based on big data
3.4 小结
信号系统从早期的固定闭塞制式,经过准移动闭塞制式,正式进入以CBTC为代表的移动闭塞制式,实现列车自动控制技术,为城市轨道交通自动化水平的进一步提高奠定了基础。全自动运行系统也逐步开始备受关注,并成为城市轨道交通未来的发展趋势[9](见图 6)。今后随着智能化水平的提高,整个信号系统也必将在FAO技术的基础上进一步提高智能化、信息化、自动化水平。

图6 信号技术发展趋势Fig. 6 Development trend of signal technology

图7 全自动运行系统下人员配置Fig. 7 Staffing of FAO system
4 建设FAO系统的若干建议
全自动运行系统使得系统自动化水平整体提升,障碍物检测、雨雪模式,车门故障,站台火灾等故障场景下,将实现各系统联动的自动处理,与非全自动运行系统有较大区别。应用全自动运行系统不是简单的采用新技术、新设备,运营规则与系统的匹配度会大大影响系统的可用性[10]。FAO系统通过技术的进步,带来的运营管理规则,特别是使人员的配置发生了重大变化。如图7所示,运营人员的配置地点、配置数量、工作职责、工作环境等,相对于传统的CBTC系统均有了较大的变化。
4.1 制定相匹配的运营规则
在制定运营规则时应遵循“遵循标准、形成场景、应对变化”的步骤来进行。首先针对遵循IEC-62267/62290等标准,结合本地轨道交通特点,形成符合专用的全自动运行场景说明书,场景说明书必须涵盖运营出现的正常场景和故障场景。通过场景分析识别出哪些岗位职责发生了变化,从而整编成为新的行之有效的运营规则。
4.2 分步骤推进FAO线路的应用
全自动运行系统是轨道交通信号系统发展的必然趋势,首条FAO线路可选择客流量较小的线路。同时建议在后续全自动运行线路规划时,按照GoA4设计,GoA3运营,通过3~5年的磨合,再逐步过渡到GoA4,使得建设、运营、维护、乘客等人员适应新的全自动运行系统,从而发挥FAO系统的最大优势。
在各方面水平达到时,可进行进一步的推广,采用FAO将全面提升线路的运营能力。
4.3 提高系统集成度实现多专业联动
现阶段 FAO系统的定义对系统集成并无明确规定和要求,但是随着城市轨道交通自动化水平的提高,全自动运行系统对多系统间的信息交互的准确性、及时性等会提出更高的要求。因此,通过将信号、综合监控、视频监视、乘客信息、广播、站台门等多专业系统深度集成,实现系统间的数据流向简洁化,达到统一数据源、加快系统信息化,结合云平台构建以行车为核心、面向乘客服务的综合行车控制系统,将是全自动运行系统技术发展的必然趋势。
4.4 建议设立独立的运营团队
与传统CBTC相比,全自动运行的运营场景及运营理念有明显不同,为避免混淆,建议组建相对独立的运营团队,针对FAO制定相应的运营规则,从而更好地发挥FAO系统能力,真正为线路运营能力的提升做出贡献。
5 结语
综上所述,全自动运行系统是轨道交通信号系统发展的必然趋势,全自动运行系统并不是简单的新设备应用,而是新技术应用带来的运营管理模式的改革。只有结合今后运营的具体场景和规则来建设,才能实现全自动运行系统自动化水平提升所带来的人力和各项成本的显著降低。
我国FAO应用前景广阔,有必要在既有丰硕成果的基础上规范FAO的具体要求,可将包括信号、综合监控、PIS(乘客信息系统)、CCTV(视频监控系统)、PA(通信广播系统)、站台门等系统在内的更多行车控制系统集成进来,实现数据源统一、集成度高、联动功能强大的综合行车控制系统,进一步提升总体自动化水平。
[1] Railway Applications-Urban Guided Transport Management and Command/Control Systems Part 1: System Principles and Fundamental Concepts: IEC. IEC 62290-1[S]. Geneva:IEC, 2007.
[2] 张艳兵, 王道敏, 肖衍. 城市轨道交通全自动驾驶的发展与思考[J]. 铁道运输与经济, 2015, 37(9): 70-74.ZHANG Yanbing, WANG Daomin, XIAO Yan, Development and thoughts on full-automatic operation of urban rail transit[J]. Railway transport and economy, 2015, 37(9): 70- 74.
[3] 李中浩. 浅析城市轨道交通信号系统的发展趋势[J]. 城市轨道交通研究, 2016, 19(Z1): 1-3.LI Zhonghao. A brief analysis of the development trend of urban rail transit signaling system[J]. Urban mass transit,2016, 19(Z1): 1-3.
[4] 肖培龙. 全自动驾驶技术分类及系统设备等配置要点[J].铁路通信信号工程技术, 2016, 13(6): 45-47.XIAO Peilong. Key point of technical classification and system equipment configuration of full automatic system[J].Railway signaling & communication engineering, 2016,13(6): 45-47.
[5] 金华. 城市轨道交通全自动无人驾驶信号系统功能分析[J]. 铁路计算机应用, 2014(1): 61-64.JIN Hua. Analysis for function of full automatic unmanned signal system of urban transit[J]. Railway computer application, 2014(1): 61-64.
[6] 宗明, 郜春海, 何燕. 基于CBTC 控制的全自动驾驶系统[J]. 都市快轨交通, 2006, 19(3): 34-36.ZONG Ming, GAO Chunhai, HE Yan. Full automatic operation system based on CBTC control[J]. Urban rapid rail transit, 2006, 19(3): 34-36.
[7] 朱翔, 王大庆 . 城市轨道交通无人驾驶技术的若干应用问题[J]. 城市轨道交通研究, 2006, 9(12): 36-38.ZHU Xiang WANG Daqing, Application problems of driverless technology in Urban Rail Transit[J]. Urban mass transit, 2006, 9(12): 36-38.
[8] 杜薇. 全自动运行燕房线工程七大核心设备系统独立RAMS评估研究[J]. 铁路技术创新, 2015(4): 22-28.DU Wei. Research on independent RAMS evaluation of seven core equipments for automatic operation of Yan Fang railway project[J]. Railway technological innovation,2015(4): 22-28.
[9] 宁滨, 刘朝英 . 中国轨道交通列车运行控制技术及应用[J]. 铁道学报, 2017, 39(2): 1-7.NING Bin, LIU Chaoying.Technology and application of train operation control system for China rail transit System[J]. Journal of the China railway society, 2017, 39(2):1-7.
[10] 武长海. 城市轨道全自动无人驾驶技术应用探讨[J].铁路通信信号工程技术, 2016, 13(5): 54-58.WU Changhai. Application of full automatic driverless technology in urban rail transit[J]. Railway signal &communication engineering, 2016, 13(5): 54-58.
猜你喜欢
机械工业标准化与质量(2022年3期)2022-08-12
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
快乐语文(2021年15期)2021-06-15
装备制造技术(2020年3期)2020-12-25
童话世界(2020年13期)2020-06-15
小学生学习指导(低年级)(2019年6期)2019-07-22
故事大王(2019年4期)2019-05-14
城市轨道交通(2019年2期)2019-04-04
智能建筑电气技术(2015年5期)2015-12-10