
手推式电动拖地小车设计*
2018-03-13 09:43梁泽芬林小军闫国强吴国明
机械研究与应用 2018年1期
梁泽芬,林小军,闫国强,吴国明
(1.兰州工业学院 机电工程学院,甘肃 兰州 730050; 2.四川职业技术学院 机械系,四川 遂宁 629000)
0 引 言
拖把作为清洁工作的必需品,是生活中不可缺少的帮手[1]。要对大型广场、车站、码头这些场所进行清洁, 传统拖地方式劳动强度大、效率低, 已难以满足要求。传统的吸尘器也难以将粘连在地上的尘土打扫干净[2-3]。传统的拖布和带脱水装置的拖布,脱水效果并不好,擦完的地面仍留有水渍,还需用干抹布进一步擦拭,否则很容易被踩脏,也很容易滑倒,存在一些安全隐患[4-7]。笔者设计的手推式电动拖地小车由曲柄连杆机构带动齿轮齿条传动带动扇形齿做120°摆动,带动拖布来回摆动实现拖地功能,后置刮板在小车重力作用下与地面接触,对地面进行二次清洗。该拖地车能对大面积场地进行拖、洗,大大的提高了劳动效率。
1 总体方案的确定
该手推式电动拖地小车主要由驱动系统、托板装置、曲柄摇杆机构和齿轮齿条传动装置、托板、刮板等组成,其结构示意图如图1所示。驱动装置各部件安装固定在车架体的架面上,托板装置安装在车体下面;主动轮经连接件固定在车架体的下部。齿轮齿条传动带动扇形齿做120°摆动带动拖布来回摆动实现拖地功能,后置刮板在小车重力作用下与地面接触,对地面进行二次清洗。
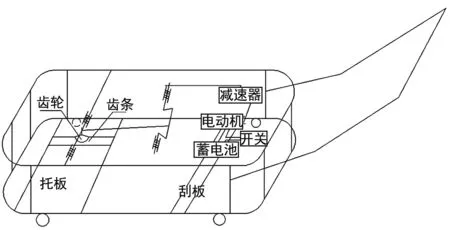
图1 手推式电动拖地小车结构示意图
1.1 传动装置设计
手推式电动拖地小车工作原理是:拖地小车的作用是人推着拖地小车在地面行进,由一台1.5 kW电动机作为动力源,电动机输出转速为1 400 r/min经蜗轮蜗杆减速器减速后输出,再通过齿轮传动带动曲柄连杆机构转动,进而带动扇形齿轮来回摆动(连杆与扇形齿轮链接为一个整体)使得齿条带动托板来回摆动,托板上的拖布与地面接触从而达到了拖地的功能。传动装置传送原动机的动力、变换其运动,以实现拖地装置预定的工作要求,该拖地小车传动装置简图如图2所示。
实验证明人用普通拖把拖地时摆动一个来回大概需要2 s,既人的拖地速度为0.5次/s,要提高拖地的效率就要提高拖把来回摆动的速度,此次设计的手推式电动拖地小车上托板的摆动速度设定为120 r/min,即0.5 s一个来回。而电动机的转速为1 400 r/min,现需要通过减速器减速,选用传动比i=10的蜗轮蜗杆减速器,这样输出的转速就为140 r/min,然后再通过改变带轮的大小就可以使托板的摆动速度达到120 r/min。
1.2 运动机构设计
曲柄连杆机构的设计(如图3所示)为拖地小车实现拖地功能的关键执行机构,构件1为曲柄,2为连杆,3为摇杆。通过曲柄1的回转运动,带动摇杆3作往复摆动,摇杆3带动下面的扇形齿轮来回摆动,与所啮合的齿条形成拖地动作。

图3 曲柄连杆机构设计简图
现讨论构件1相对于构件4作整周转动的条件,即A为转动副的条件。当AD>AB,显然构件上的B点应能通过以A为圆心、AB为半径的圆周上的任意一点,如图3中的B′点和B″点,否则A就不是整转副。 当到达B′点时,A、B′ 、C′和D形成△B′C′D′,这时B点和D点之间的距离达到最大值BDmax=AB+AD。显然,由△B′C′D存在的几何条件可知,四杆的长度必然满足:
AB+AD≤BC+CD
同理,当AB处在AB″时,B″ 、C″和D形成△B″C″D,这时B点和D点之间的距离达到最小值BDmin=AD-AB。由△B″C″D存在的几何条件可知,四杆的长度满足:
BC+AB≤CD+AD
或AB+CD≤BC+AD
上式各等式中的等号表示当B点到达B′点和B″点时,刚好形成整转副。
将前几式两两相加,得:
AB≤BC
AB≤CD
AB≤AD
由已知条件AB=120 mm,AD=400 mm,CD=180 mm,BC≤CD+(AD-AB),带入,得BC≤460 mm,取BC=380 mm。
分析上述数据,满足铰链四杆机构中连接两构件的运动副成为整转副的条件,即最短构件与最长构件长度之和小于或等于其余两构件长度之和;被该运动副连接的两构件中必有一构件是四杆中长度最短的构件。
由于A、D两点位置不变,B、C两点距离不变,所以B绕A点,C绕D点转动形成的圆弧B′BB″=弧C′CC″。
弧B′BB″=弧C′CC″
式中:∠B′BB″=180°,AB=120 mm,CD=180 mm
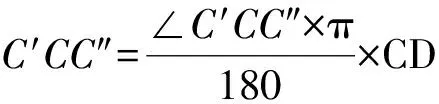
解得∠C′CC″=120°,则对应的扇形齿轮是120°;以此确定齿条长为265 mm。 齿轮齿条设计结构如图4所示。
图4 齿轮齿条结构图
依据前述设计与计算,设计运动机构的三维图如图5,手推式电动拖地小车整体结构如图6所示。

图5 运动机构三维设计图 图6 手推式电动拖地小车 三维结构图
2 结 论
设计的手推式电动拖地小车在人力作用下推动前进,曲柄摇杆机构控制扇形齿做120°摆动,同时带动托板上的齿条来回摆动进而使得托板做来回摆动,托板下的拖布实现拖地功能。拖地小车整体设计重心靠后,后部的万向轮起负重与驱动的作用,前导轮辅助行走,刮板在小车重力作用下与地面紧密接触,
对地面进行二次刮洗。托板下面的拖布采用可装卸式的,随时可以清洗,提高了拖地效率,减轻了操作者劳动强度,本小车价格低廉,清洁效率高,值得推广。
[1] 袁新梅,蔡 飞,王行江,等.一种家用清洁扫地拖地机的设计[J].长江大学学报(自科版),2014, 11(4):60-61.
[2] 刘 洋,陈义厚.新型电动拖地车的设计与研究[J].装备制造技术,2007(8):145-146.
[3] 刘英旋.速干拖地装置设计[J].河南科技,2014(24):129-130.
[4] 张杜鹊,苏楚奇,欧阳海.前装卸式真空清扫车吸尘系统仿真与优化[J].机械研究与应用,2009(3):68-70.
[5] 汤学华,夏晨晨,蒋 政.一种人力式垃圾清扫车的结构设计与分析[J].上海电机学院学报,2014(5):259-262.
[6] 王 琳.一种多功能清扫装置机械结构设计与研究[J].机械工程师,2013(8):54-56.
[7] 陈晓勇.新型保洁清扫自行车[J].机械研究与应用,2004(3):85.
猜你喜欢
数学小灵通(1-2年级)(2022年3期)2022-03-17
学苑创造·A版(2022年2期)2022-01-29
施工技术(中英文)(2021年2期)2021-04-07
发明与创新·中学生(2020年1期)2020-08-03
水运工程(2020年2期)2020-02-26
上海大中型电机(2019年4期)2019-12-31
小星星·阅读100分(低年级)(2019年10期)2019-11-26
物流技术与应用(2019年6期)2019-07-16
煤矿安全(2019年4期)2019-05-07
重型机械(2016年1期)2016-03-01
