
基于PID的高随动性绕线系统控制方法设计*
2018-03-13 09:43王振宏
机械研究与应用 2018年1期
王 磊,王振宏
(长春理工大学 机电工程学院,吉林 长春 130022)
0 引 言
自动绕线机是用漆包铜线绕制线圈的一种专用机器,是现代电器行业中常用的一种加工设备[1]。其工作原理是绕线电机带动线圈骨架按照规定的方式旋转,将漆包铜线缠绕在线圈骨架上[2]。随着加工制造行业的发展,在很多生产领域都是需要多台设备之间紧密配合才能完成生产实践的,显然仅靠1台设备已经无法满足高新技术的发展需求。高随动性绕线机就是能直接把打标完的漆包铜线缠绕成需要线圈的一种加工设备。
要想实现绕线机的高随动性,实质上是绕线线轮的电机跟随放线线轮的实时速度反馈进行动态调节的过程。由于PID控制方法存在一定的时滞性,笔者利用PID和bang-bang相结合的方式设计了放线跟随控制系统。该控制系统可以使得系统出现大的波动时调节时间变短,加快系统的响应速度,在系统的稳定性和响应速度方面相对于单纯使用PID控制时的控制效果有较大提高,能够满足生产需求[3-5]。
1 绕线机控制系统的组成
在绕线机的入线口与绕线轴之间设计一个滑轮组型式的储线机构,该机构以拉线位移传感器作为动滑轮的位置反馈来实时调节绕线电机的转速,实现绕线电机随入线电机的速度同步运行,其结构图如图1所示。
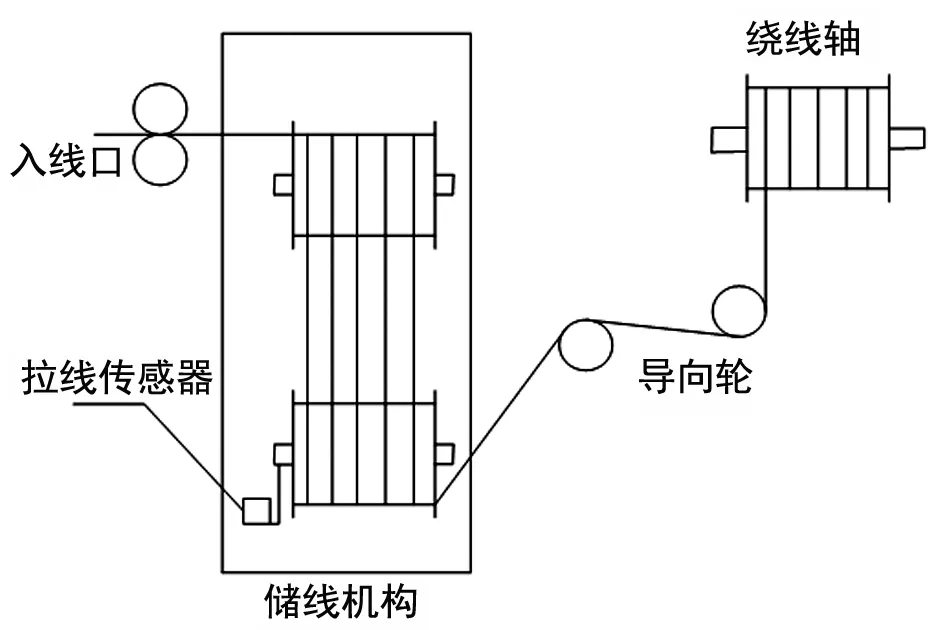
图1 绕线机的结构
1.1 收线轴的控制系统设计
PID控制器在控制系统中是一种应用最为广泛的控制方法,它不只原理简单、容易实现、适用范围广,而且对于控制过程中的滞后系统具有很好的控制性能。图2为PID控制系统的结构框图。
本绕线机的储线机构根据砝码配重块的重量调节系统的线张力,在系统运行过程中利用动滑轮和静滑轮之间的距离对绕线线轮的速度进行实时调整。其系统的输入量为给定砝码配重块悬浮位移量r(t)与砝码配重块实际悬浮位移量s(t)的偏差值为:
e(t)=r(t)-s(t)
(1)
输出偏差e(t)的比例、积分和微分的线性组合:
(2)
式中:Kp为比例系数;KI为积分时间常数;KD为微分时间常数。
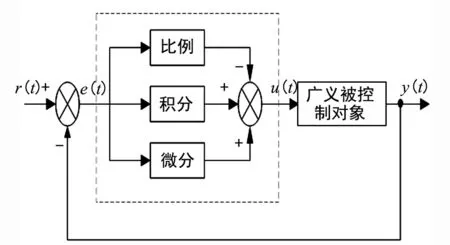
图2 PID控制系统结构框图
在系统运行过程中,当被控量的数值接近与给定的数值时,积分产生的作用受到比例反向作用的影响,从而使得系统的震荡减小,提高系统的稳定性;当给定值与被控量的值偏差较大时,由于比例和积分之间的作用关系,使系统的调节过程变得缓慢,从而出现砝码配重块降到最低位置,产生松线现象,或者砝码配重块快速冲到顶部,使得线缆被拉断。
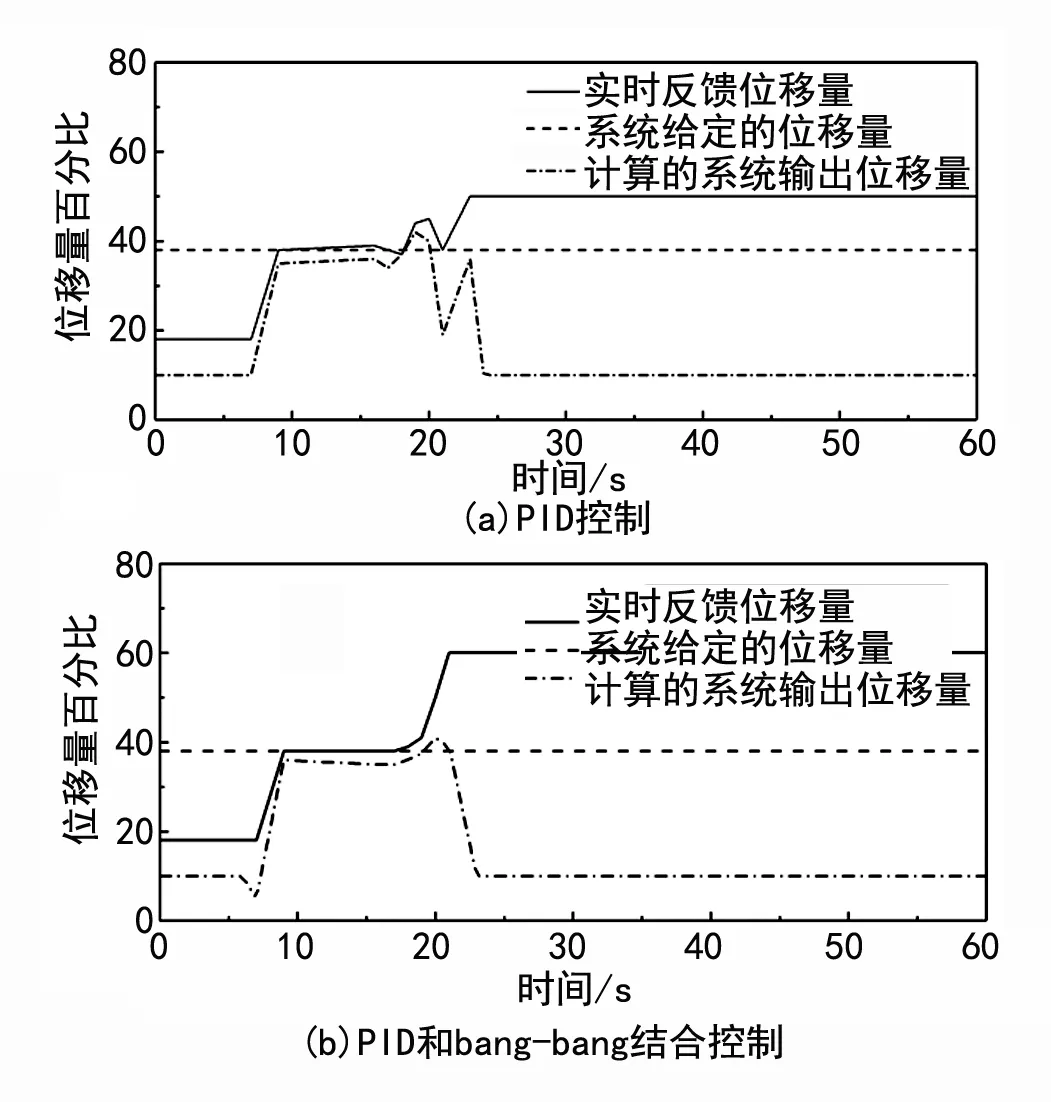
为了提高系统开始的动态调节过程,利用bang-bang控制的方法,设置一个动滑轮移动范围α1和α2,当α1 图3 PID与bang-bang控制的绕线机收线电机控制框图 Kp、KI和KD对系统性能的影响:Kp越大,则系统越灵敏,但随着比例系统变大,系统的振荡次数增多,系统的调节时间增长,稳定性变差;Kp偏小,系统的反应速度缓慢。KI的作用会使得系统的稳定性降低,KI越小会使系统的稳定越差,但可以消除系统的稳态误差,提高系统的控制精度。KD的作用可以提高系统的动态性能,KD偏大时,会使系统的超调量增大,缩短系统的调节时间;KD偏小时,会使系统的超调量也增大,增长系统的调节时间;在调试过程中实时检测储线机构上的拉线位移传感器,如果在上升过程中出现大的脉冲波形,可以适当减小Kp,如果上升时间比较慢,可以适当增加Kp,调节好Kp后可以适当变化KI和KD,改变系统动态和静态性能。 该高随动性绕线系统的结构包括伺服控制系统、变频控制系统和一个PLC控制器作为系统的外环控制器,以拉线位移传感器作为系统的速度反馈,触摸屏作为系统的人机交互界面,一些上下限位开关作为系统的保护装置。该系统的电动机采用异步电机,线径的范围为0~4 mm。 图4 两者控制方法的位移量和输出控制量的曲线 图4为绕线机与打标机系统联动时仅PID控制时和PID结合bang-bang控制时两种控制方法的位移给定量、反馈量和输出量的曲线图。图中反映了系统的启动过程、稳定运行阶段以及系统停止运行的过程。比较图4(a)和图4(b),可以看出图4(b)中加入bang-bang控制方法的系统在启动和稳定运行阶段的稳定性要比只有PID控制时的稳定性更好。 设计了一种高随动性绕线系统的控制方法,在联机运行的过程中,该控制方法通过控制收线电机的速度,以放线打标机为基点,根据放线线轮和收线线轮的速度差,来控制系统的随动运行。设计了只有PID控制的收线随动系统和PID与bang-bang相结合的收线随动系统。根据实验调试过程中实际运行的效果,对比两种控制方法发现,由于PID控制存在一定的时滞性,加入bang-bang控制后当系统出现较大波动时的调节时间缩短,系统的响应速度提高。该系统 改进后的控制方法提高了系统的稳定性和响应速度,对于后面绕线机的进一步性能提高研究具有参考意义。 [1] 陈迎国.自动绕线机的设计与实现[D].西安:西北工业大学,2004. [2] 庞佳涵.电脑自动绕线机的研究与开发[D].大连:大连理工大学,2004. [3] 高 雅,朱秦岭.基于PLC的绕线系统控制方法研究[D].西安:西安工业大学,2017. [4] 毛建鑫,刘 伟,周广锋.高精度自动绕线机控制方法的研究[J].计算机测量与控制,2012,20(1):95-97. [5] 柯 良,冯关明,章建军,等.缝纫机绕线机自动控制系统的设计[J].现代制造工程,2014(11):117-120.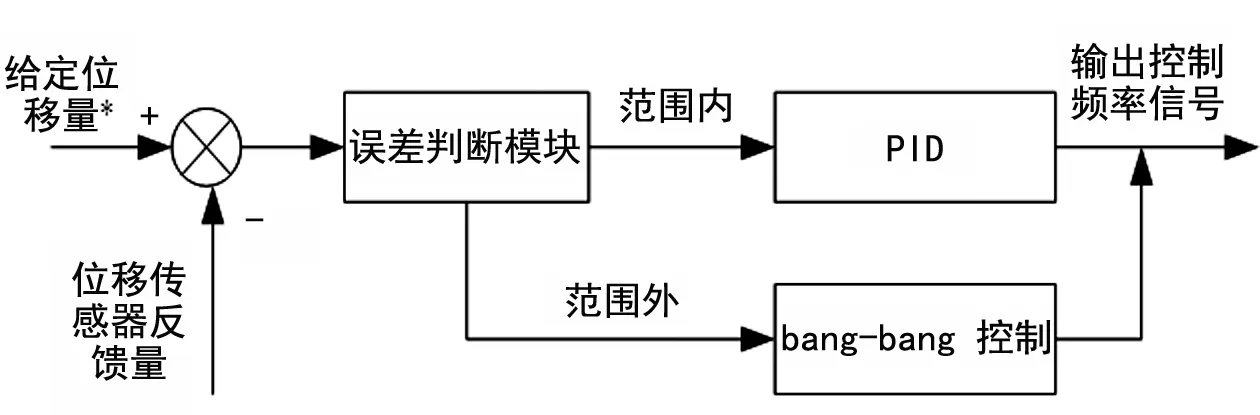
1.2 PID参数整定
2 实验分析
3 结 论
猜你喜欢
防爆电机(2021年6期)2022-01-17
商品与质量(2021年7期)2021-04-02
电子技术与软件工程(2020年10期)2020-02-01
制造技术与机床(2019年11期)2019-12-04
数学小灵通(1-2年级)(2018年6期)2018-06-28
天津冶金(2018年2期)2018-06-14
作文周刊·小学四年级版(2018年6期)2018-03-15
电子制作(2017年20期)2017-04-26
智能建筑与智慧城市(2016年7期)2016-08-18
数学大王·中高年级(2015年6期)2015-06-26
