基于飞行过载的低速旋转弹箭章动特性研究*
2018-02-21 10:01齐竹昌毕艳超王天明
弹箭与制导学报 2018年5期
张 意,齐竹昌,毕艳超,王天明
(西安现代控制技术研究所,西安 710065)
0 引言
中小型弹箭多采用尾翼稳定、低速旋转方案以提高飞行的稳定性和弹道的一致性[1],而在弹箭旋转并存在一定的攻角时,弹体附近流场相对于攻角平面不对称而产生垂直于攻角平面的力和力矩,即马格努斯力和马格努斯力矩[2],从而影响航向的动稳定性,如发生大幅度的章动飞行,严重影响弹箭的飞行距离和命中精度[3]。为了提高低速旋转弹箭的飞行稳定性和命中精度,需要设法抑制甚至消除飞行的章动。因此迫切需要掌握诱发弹箭发生章动飞行的现象及内在机理进行描述。
在分析旋转弹飞行章动的过程中,目前普遍采用高速摄像法、雷达测试法、地磁测试法等进行章动测试,测试设备要求高、成本大,且后续处理复杂[4],而常规测量姿态的惯性导航装置难于测量低速旋转弹箭的姿态振荡,因此在飞行试验中仅通过搭载的转速传感器及过载传感器进行飞行稳定性判断,当发现转速异常、过载信号增大等信号特征,只能说明章动发生的时间和现象,而无法对章动的幅度、规律进行定量的描述。文中通过对旋转弹箭弹体系下的过载传感器信息进行频率特性分析,对姿态章动过程进行定量解算,重构了无控飞行、滑翔飞行的章动过程,并通过试验数据和弹道仿真进行了验证。
1 低速旋转弹箭过载传感器测量建模
在弹箭飞行过载测试中,过载传感器一般安装在弹体质心附近与弹体的Y轴和Z轴正交安装,如图1所示,测量弹体系下Y轴和Z轴方向的加速度,即除去重力外,Y轴和Z轴方向所受外力与弹体重量之比,而弹体在飞行过程中(无助推发动机)所受到的外力仅有气动力,因此过载传感器所测量的结果直接表征弹体所受的气动力大小。
飞行过程中弹体Y向和Z向上受到的力主要包括:攻角及侧滑角产生的气动升力、气动不对称产生的干扰力及弹体旋转引起的马格努斯力等[5],其中Y方向上以攻角产生的升力为主,Z方向上以侧滑角产生的升力为主,所以在分析过载传感器的测量信号时,主要考虑由攻角和侧滑角产生的气动力。
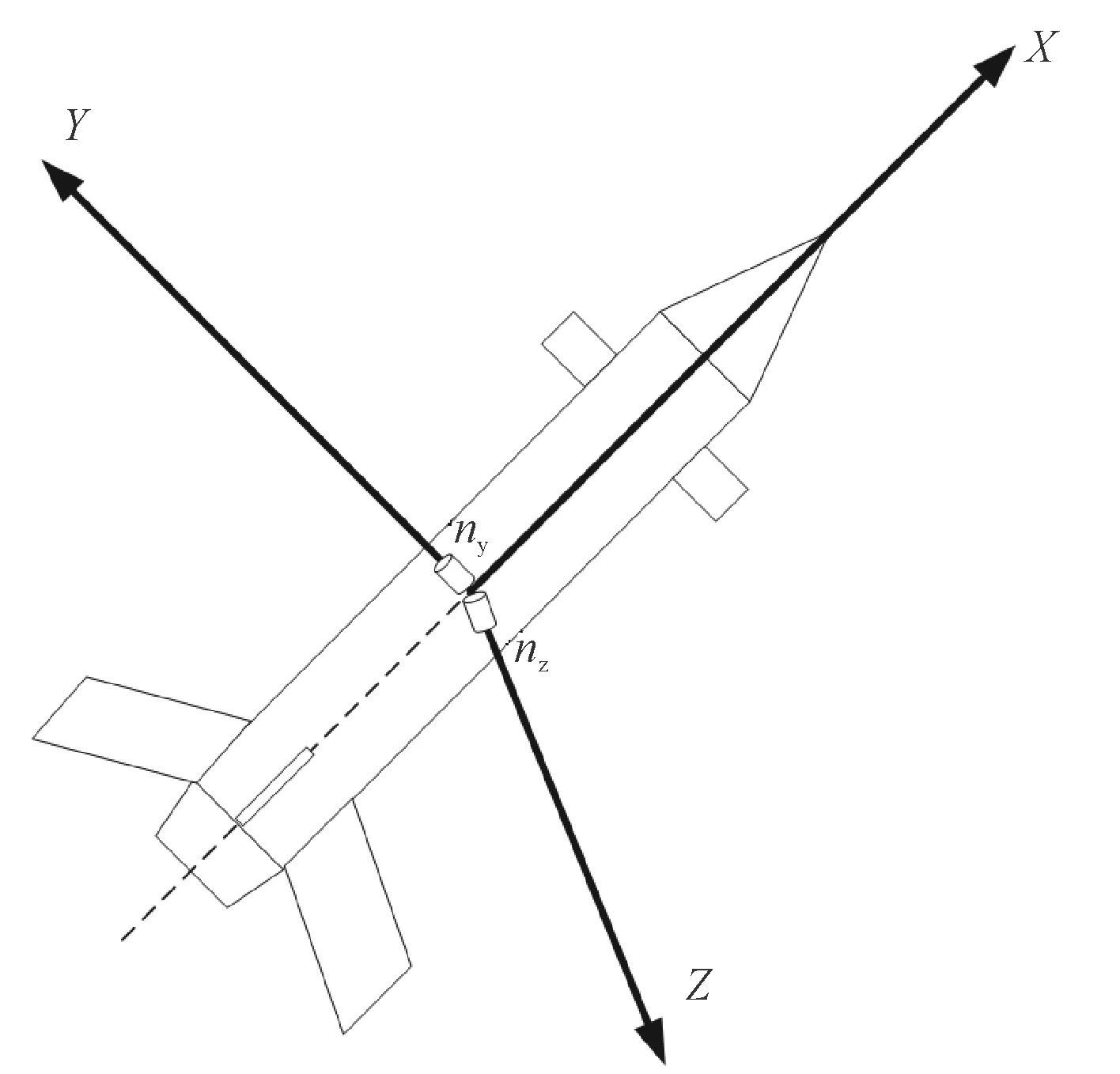
图1 过载传感器安装图
对于旋转弹,气动力计算一般选取在准速度系,而过载为弹体系下的比力,需要将气动力变换至弹体系下,才能反映出过载传感器上测量的力。
弹体系下测量的过载为:
(1)
准速度系下的气动力为:
(2)
准弹体系下的气动力为:
(3)
一般弹箭飞行过程中,攻角α和测滑角β均为小量(α<10°,β<10°),所以Y4≈Y5,Z4≈Z5,此时Y向和Z向的过载可表示为:
(4)
2 弹箭无控飞行章动特性分析
2.1 传感器测量无控飞行章动建模
旋转弹箭在发生陀螺运动时存在着三种角运动:一是绕其自身纵轴线的转动;二是绕弹道切线方向的转动,称为进动或者锥动,此时弹体纵轴与弹道切线间的夹角称为进动角或锥动角;三是弹箭轴线相对于弹道切线做的摆动运动,两线间的夹角由大到小,再由小到大,做周期性的变化,此种摆动称为章动,摆动的角度称为章动角。
考虑到尾翼稳定的旋转弹箭在飞行过程中受到的侧向力矩、马格努斯力矩等,弹体会发生绕弹道切线的周期性章动,其章动频率主要取决于静稳定力矩值,章动频率:
(5)
一般右旋尾翼稳定弹箭在正攻角飞行情况下,马格努斯力矩产生左旋的扭转力矩,弹轴绕弹道切线逆时针旋转,设章动角为φ,则攻角平面的发散运动可以描述为如图2所示。
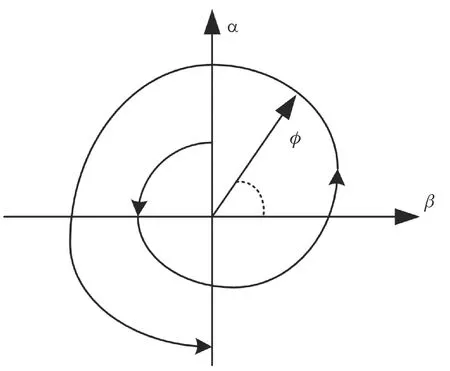
图2 无控飞行章动示意图
则可以把攻角及侧滑角近似为:
(6)
可以推导出过载传感器测量的弹体系下的受力为:
(7)
从式(7)可以看出,无控飞行章动时,过载信号的频率特性为弹体频率与弹体旋转频率之和,过载信号的幅值反应的是章动幅度的大小。
2.2 无控飞行章动试验数据分析
在某型低速旋转弹箭的无控飞行试验中,测量弹体系下的飞行过载如图3所示,过载值为1~2g,出现了弹体姿态章动现象,造成飞行速度降低及近弹现象。

图3 弹体系下测量的过载值
对弹体飞行测量的过载信号进行快速傅里叶变换,结果如图4所示,飞行章动的过载信号处理出的主频率为弹体的旋转频率ωx与弹体频率ωc的叠加,与理论推导出的结论一致。
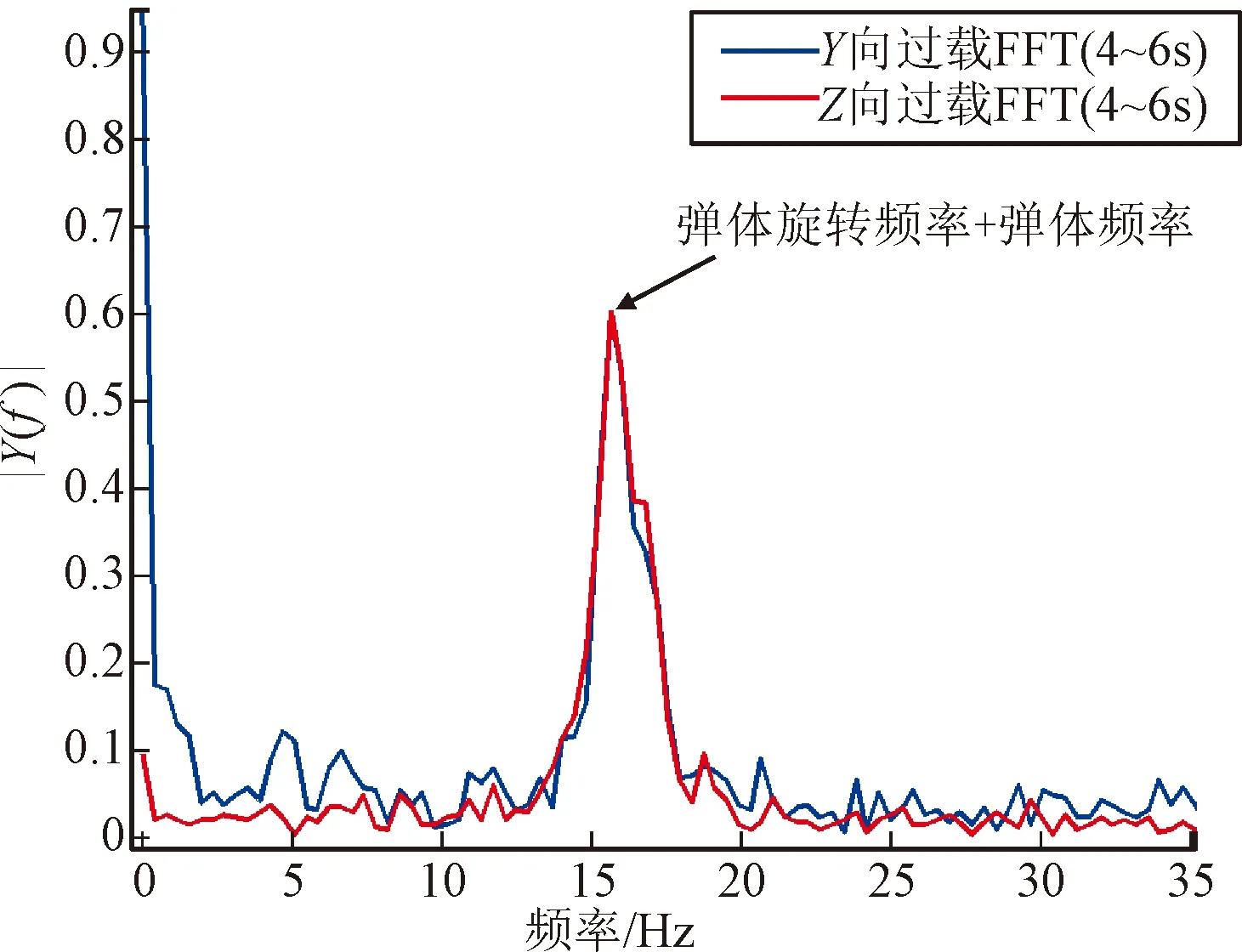
图4 过载信号快速傅里叶变换
2.3 无控飞行章动重构
通过飞行过程中的受力分析,投影至弹体系下传感器测量值,测量的过载为:
(8)
采用上面的飞行过载曲线进行反算后,可得到实时的飞行攻角,即无控飞行段的弹体姿态章动的整个过程,如图5所示。

图5 弹体姿态章动过程
3 惯性滑翔段飞行章动特性分析
3.1 传感器测量弹箭滑翔飞行章动建模
惯性滑翔段通常控制弹箭按照一定的姿态角飞行,飞行过程中存在一定的平衡攻角αP,在正攻角飞行情况下,马格努斯力矩产生左旋的扭转力矩,弹逆时针旋转,设章动角为φ,则攻角平面的发散运动可以描述为如图6所示。
图6 攻角平面发散过程
攻角和侧滑角可以表示为:
(9)
与无控飞行章动建模一致,推导出弹体系下的过载传感器测量数据为:
(10)
通过式(10)分析,当飞行过程中的章动角φ较小时,则主要反映出平衡攻角下的受力对滚转角度的调制,其主频率特性为ωx;当章动角度较大时,主频率除了旋转频率ωx外还有ωx+ωc频率。
3.2 滑翔段飞行章动试验数据分析
在某型低速旋转弹箭的滑翔段飞行试验中,测量弹体受到的过载值为1.5~2g,正常飞行时其飞行过载约为1g,如图7所示,其振荡的幅值与频率均与正常飞行弹不同,造成飞行速度降低及近弹现象。
图7 滑翔段振荡与正常飞行的过载信号对比
通过对低速旋转弹箭滑翔段进行分析,正常滑翔时测量的过载曲线主频率基本与弹体旋转频率一致,而滑翔段振荡的过载信号频率为弹体转速频率和弹体频率之和与转速频率两个主频率,与3.1中分析的结论基本一致。
图8 滑翔段过载信号快速傅里叶变换
4 弹道仿真验证
通过上述对无控及滑翔飞行段的章动特性描述,定量分析了弹体在飞行过程中的章动幅度及频率特性,重构了无控飞行的整个章动过程,对滑翔过程中的章动现象进行了频率分析。
根据章动过程的分析,建立马格努斯力矩干扰的动态弹道仿真模型,完成了低速旋转弹无控段、滑翔段的飞行章动过程的复现。
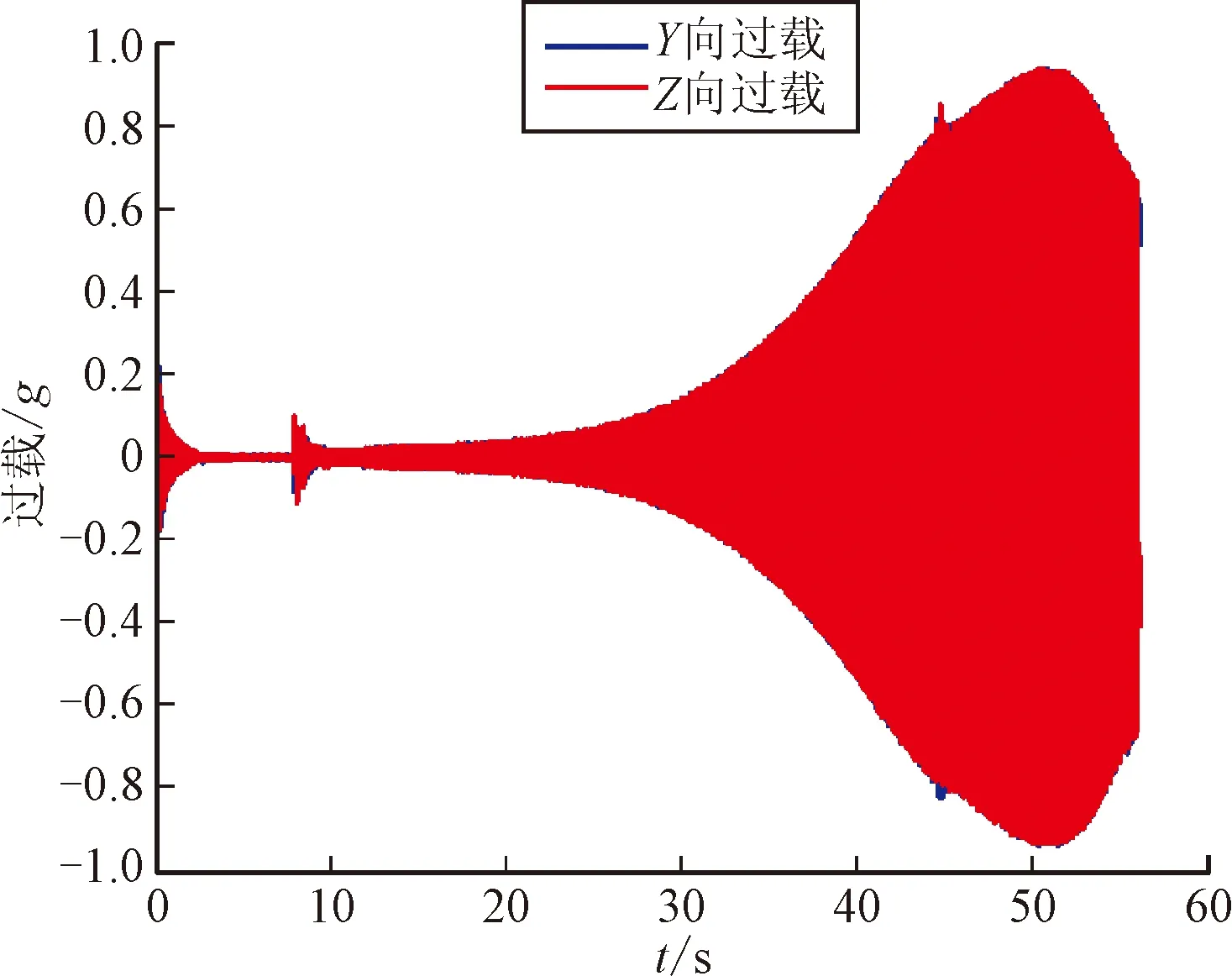
图9 无控飞行过载仿真曲线
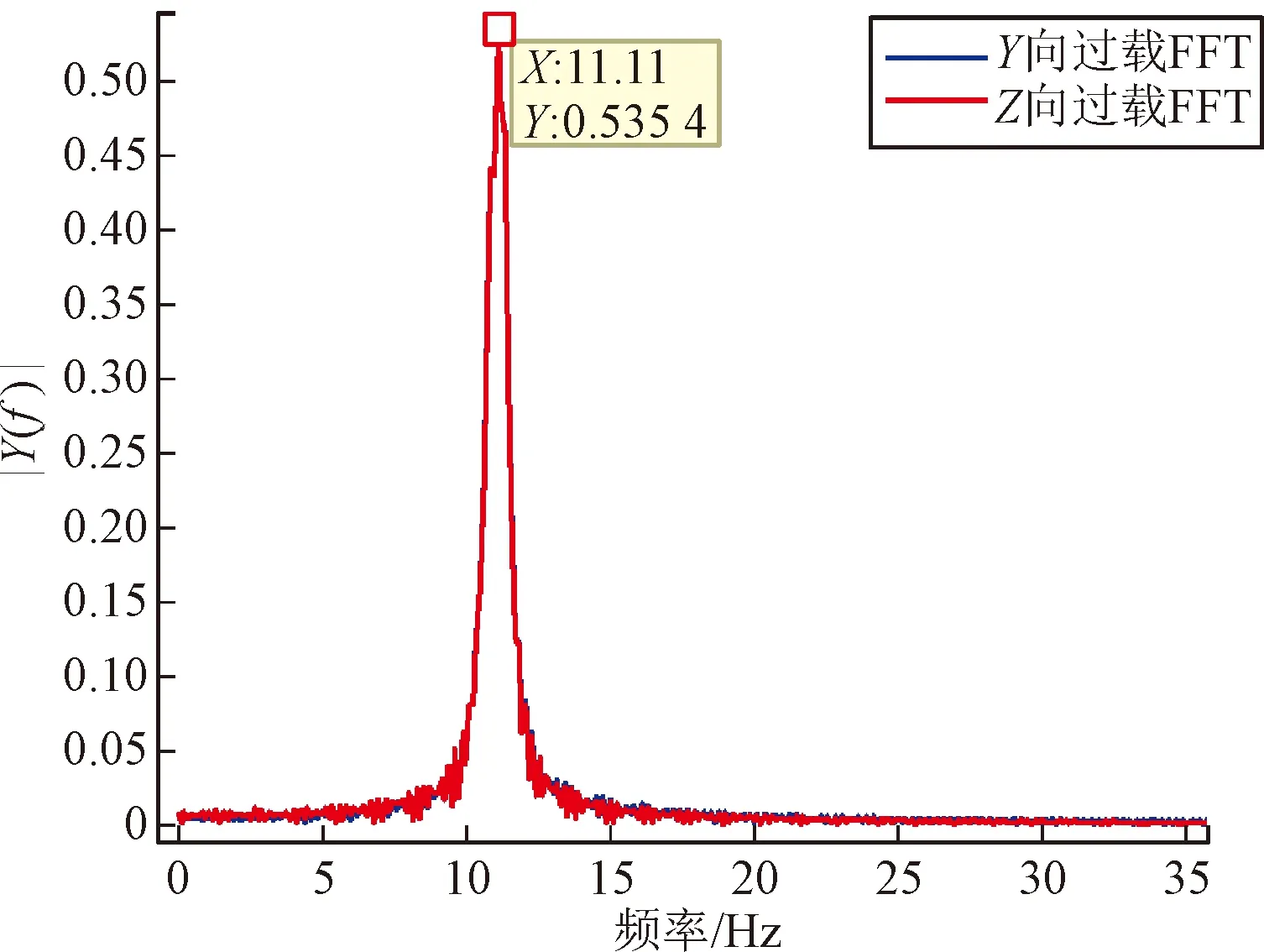
图10 无控飞行50 s时过载傅里叶变换
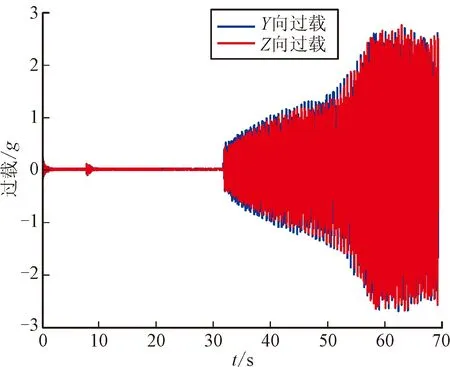
图12 滑翔飞行过载曲线
5 结论
文中提出了一种采用过载传感器对飞行品质进行判断的方法,利用飞行过程中基于弹体系下的过载传感器的信息进行旋转弹箭的频率特性分析,并对姿态章动过程进行定量解算,重构飞行章动过程,为飞行状态及飞行品质提供评价依据。
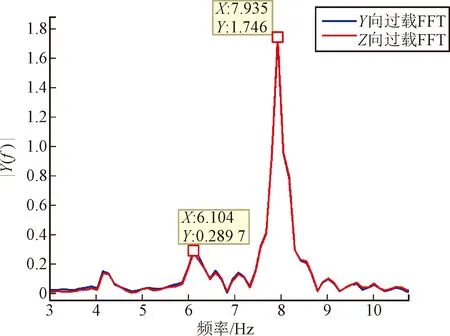
图13 滑翔飞行60 s时的过载傅里叶变换

图14 滑翔飞行章动过程
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10
兵器装备工程学报(2022年4期)2022-05-09
爆炸与冲击(2022年2期)2022-03-17
军民两用技术与产品(2021年7期)2021-10-13
兵工学报(2021年6期)2021-07-29
北京航空航天大学学报(2020年3期)2021-01-14
数字海洋与水下攻防(2019年4期)2019-12-02
宇航总体技术(2019年5期)2019-10-11
兵器装备工程学报(2019年7期)2019-08-13
汽车零部件(2018年8期)2018-09-06