
载机大机动条件下空空导弹弹射发射动力学研究
2018-02-10 02:43:55张士卫
振动与冲击 2018年2期
刘 浩, 周 军, 张士卫
(1.西北工业大学 航天学院,西安 710072;2.中国空空导弹研究院,河南 洛阳 471009)
隐身战机(如美国F-22)一个新的标志性的作战性能就是在圆周大机动高过载条件下实现空空导弹的弹射发射,对大机动高过载条件下的发射动力学特性进行研究具有重要的理论价值和工程应用价值。在现阶段,相关文献主要集中在载机平飞状态条件下空空导弹的发射动力学研究[1-5],在大机动高过载条件下的机载内埋弹射发射动力学研究还鲜见报道,相关研究文献很少。陈全龙等[6]通过MSC /Dytran有限元分析软件,建立飞机机体-导轨发射装置-导弹系统的有限元模型,分析了在战机典型飞行条件下和大机动条件下的导轨式发射方式的相关发射动力学特性,但还未涉及内埋弹射发射技术;许斌等[7]通过simulink软件和adams软件建立气动式弹射发射系统的发射动力学模型,其重点在气动弹射的驱动力数学模型研究,并未涉及载机大机动和机构柔性多体动力学效应。
针对目前隐身战机大机动条件下内埋弹射发射动力学理论特性研究的严重不足,本文基于柔性多体动力学拉格朗日乘子法、构件级模态试验和载机大机动条件,提出了一种隐身战机大机动内埋弹射刚-柔-液耦合的动力学建模方法,该方法考虑了弹射发射装置柔性机构大范围高速运动、柔性变形以及液压作动三者之间的耦合,最后通过数值模型仿真分析了大机动发射时的高过载离心力对发射动力学特性的影响,为隐身战机大机动发射安全性研究以及空空导弹初始弹道研究提供理论依据。
1 大机动发射动力学模型建立
隐身战机内埋弹射发射装置采用高度轻量化设计思想,弹射速度高,弹射过载大,为了保证发射安全性对导弹分离参数的精度要求非常高。内埋发射装置的弹射机构在大幅度的高速运动过程中柔性变形非常显著,且在液压作动耦合下其发射动力学特性更为复杂。多刚体动力学理论和运动-弹性动力学理论(Kineto-Elastodynamic Analysis, KED)已无法模拟其动力学特性。因此,本文采用刚-柔-液耦合动力学模型对大机动条件下的内埋弹射发射动力学特性进行研究。
1.1 载机大机动发射工况
隐身载机在进行圆周大机动时,将产生高过载离心力,该高过载离心力对导弹的弹射发射分离姿态将产生影响。图1为战机俯冲大机动弹射示意图。导弹在弹射时受到的离心力:
Fg=mRω2
式中:m为导弹质量;R为大机动半径;ω为大机动角速度。

图1 载机大机动弹射发射示意图Fig.1 Launching under large maneuvering flight
1.2 内埋弹射发射装置构型
以AMELT构型弹射发射装置为研究仿真对象,其基本构型和构件连接关系如图2所示。工作时,由液压动力系统推动水平活塞及活塞杆向前滑动,由双y字型机构将水平运动转换成对导弹的竖直向下运动,最终实现导弹以良好的分离姿态与发射装置弹射分离。
在仿真模型中,液压动力缸和导弹作为刚体处理,上梁、水平活塞杆、各摆臂、各支臂均作为柔性体处理。

1.上梁;2.液压动力缸;3.水平活塞杆;4.摆臂1;5.支臂1;6.摆臂2;7.支臂2;8.导弹。图2 AMELT构型发射装置结构示意图Fig.2 AMELT configuration launcher
1.3 液压缸弹射驱动力数学模型
隐身战机内埋弹射发射装置多采用气液混合动力系统提供弹射动力(如美国F-22),其基本原理是气压蓄能液压传动,从而实现弹射机构的高速作动。
1.3.1 蓄能器压强数学模型
机载弹射发射系统作用时间短,约0.1 s,因此蓄能器采用理想气体绝热方程。
(1)
式中:p1为蓄能器初始压强;v1为蓄能器初始气腔体积;p2为蓄能器弹射过程中的压强;v2为蓄能器弹射过程中的气腔体积。
1.3.2 液压阀门流量数学模型
阀口液压流量数学模型:
(2)
式中:QL为流经阀口的液压流量;cd为流量系数,一般取0.6;A阀口有效通径面积;p3液压缸内的压强;ρ油液的密度,一般取900。
1.3.3 液压作动缸压强数学模型
在研究机构动力学时,文献大多将液压系统作为不可压缩对象进行处理,但这与实际不符,尤其是在研究高压快速作动的动力学模型时。本文考虑液压的可压缩性,认为液压系统是依靠液压体积的压缩实现液压压强的建立,其压强变化由以下公式建立:

(3)
式中:QL为流经阀口的液压流量;A1液压缸有效作用面积;v弹射机构液压活塞运动速度;VL进油腔体积;Eh油液的体积弹性模量,一般取700×106Pa;p3液压缸内的压强。
1.3.4 弹射机构液压活塞加速度
弹射机构液压活塞为整个弹射机构的运动驱动元件。液压活塞在受到液压压强作用同时也输出弹射作用力,从而推动整个柔性弹射机构高速运动。弹射机构液压活塞的加速度方程为:
(4)


1.4 柔性多体动力学坐标系建立
在研究多柔体系统时,合适的坐标系是非常重要的。多柔体动力学研究一般采用惯性坐标系+浮动坐标系的方法[8-11],该方法理论成熟、计算精度较高且便于数值计算。柔性体系统中的坐标系如图3所示,包括惯性坐标系(er)和浮动坐标系(eb)。前者不随时间而变化,后者是建立在柔性体上,随着柔性体的变形而变化,该坐标用于描述柔性体的运动和变形。浮动坐标系可以相对惯性坐标系进行有限的移动和转动。

图3 柔性体坐标系描述Fig.3 Flexible body coordinate system
1.5 柔性体上任意位置点运动描述
发射装置柔性体上任意位置点p在绝对坐标系er下的运动可分解为相对绝对坐标系原点的刚性平动、刚性转动以及相对于浮动坐标系的变形运动。质点p的位置运动可表述[10]为:
r=r0+A(sp+up)
式中:r为点p在惯性坐标系中的向量;r0为浮动坐标系原点在惯性坐标系中的向量;A为转换矩阵;sp为柔性体未变形时p点在浮动坐标系中的向量;up为p点相对变形向量,up可以采用不同的方法进行离散化。本文采用模态坐标来描述,有:
up=Φpq
式中:Φp为模态矩阵;q为模态坐标。
发射装置柔性体上任一点p的速度向量及加速度向量可以对r求对时间一阶导数和二阶导数得到:

1.6 发射装置多柔体动力学模型建立
1)动能T
考虑节点p变形前后的位置、方向和模态,柔性体的广义坐标可以表示为:
ξ=[xyzψθφqi]T=[rψq]T, (i=1, 2, …,n)
系统的动能包括弹射装置运动构件的动能和空空导弹的动能,表示为:
式中:质量矩阵M(ξ)为3×3维的方阵,表示为:
式中:下标t,r,m分别表示平动、旋转和模态自由度。
2)势能W
势能分为弹射发射机构的重力势能和变形产生的弹性势能两部分,可用下列二次项表示:
在弹性势能中,K是对应于模态坐标q的结构部件的广义刚度矩阵。重力势能Wg表示为:
其中g表示重力加速度矢量,重力fg可对Wg求导得:
3)能量损耗
弹射机构弹射过载大,机构柔性变形显著且迅速,其由阻尼力导致的能量损耗对机构的柔性变形需要考虑。能量损耗可由如下公式求得:
式中:D为阻尼系数矩阵。
4)多柔体动力学方程
多柔性体的运动方程从下列拉格朗日方程导出[12-13]:
式中:C为约束方程;λ为拉格朗日乘子;ξ为广义坐标;Q为对ξ应的广义力;L为拉格朗日项,定义为L=T-W;T和W分别表示动能和势能。
最终的动力学微分方程为:
C=0
1.7 发射装置构件自由模态试验
机载内埋弹射发射装置主要由三维形状复杂的运动构件组成,在进行多柔体动力学仿真时采用模态法对各构件进行离散,为了提高各构件模态离散化精度,本文提出对数值模型中涉及到的主要构件进行自由模态试验,通过模态试验频率和模态仿真频率的对比,优化模态数值模型,为弹射发射装置整机级数值仿真模型精度提供保障。
模态试验时用橡皮绳将各构件悬吊,达到“自由-自由”的边界条件状态,在构件布置多个响应点并选择好激励点[14]。本文采用“猝发随机”激励方法,利用SCADAS 316系统QDAC模块输出激励信号,响应测量采用单向加速度传感器,采用SCADAS 316系统的PQFA模块对所测数据进行采集。利用多参考最小二乘复频域法(PolyMax)对所测数据进行分析处理,最后得到各构件的模态参数。图4~图6为内埋弹射发射装置部分典型构件的模态试验图。

图4 构件1 模态试验图Fig.4 Model test of part 1

图5 构件2 模态试验图Fig.5 Model test of part 2

图6 构件3 模态试验图Fig.6 Model test of part 3
从表1和表2中可以看出,模态仿真频率和模态试验频率在1阶和2阶均具有相当高的精度,保障了发射动力学整机数值仿真模型的仿真精度。事实上试验测试出的前3~5阶模态频率和仿真频率均具有较高的匹配度。限于篇幅,本文对其他各阶模态以及其他构件的模态不一一罗列对比。

表1 1阶模态试验与仿真频率

表2 2阶模态试验与仿真频率
2 发射动力学特性仿真分析
为了保持空优作战性能,美国F-22能在8个过载的大机动条件下发射空空导弹,本文将仿真分析8个过载大机动条件下的高过载离心力对内埋弹射发射动力学特性的影响。
2.1 大机动对弹射分离参数影响特性分析
导弹弹射分离参数直接影响到隐身战机的发射安全性和导弹的初始弹道。以下弹射分离参数均是相对于载机坐标系,即是空空导弹相对于战机的分离参数。
图7为导弹弹射分离速度曲线,如图所示:在载机无机动发射时,弹射分离速度为8 m/s,分离时间为110 ms;在载机过载为4时发射导弹,弹射分离速度为9.1 m/s,分离时间为90 ms;当载机过载为8时,弹射分离速度为10.4 m/s,分离时间为77 ms。因此,随着载机大机动时过载的增加,导弹弹射分离速度将明显增加,分离时间将明显缩短。

图7 弹射分离速度曲线图Fig.7 Eject separating velocity
原应分析:弹射时导弹受到载机大机动离心力作用,离心力对导弹作功,增加导弹弹射分离速度。弹射分离速度的增加将有利于导弹迅速穿越气动干扰区域的影响,因此有利于发射安全性。
图8为导弹弹射分离加速度曲线。从图中可以看出在载机无机动发射时,弹射分离最大加速度为-105 m/s2;在载机过载为4时发射导弹,弹射分离最大加速度为-130 m/s2;当载机过载为8时,弹射分离最大加速度为-167 m/s2。弹射分离加速度的增加主要是由于导弹受到载机大机动圆周运动的离心力作用。弹射分离加速度的增加将有利于导弹迅速脱离载机,有利于发射安全性。
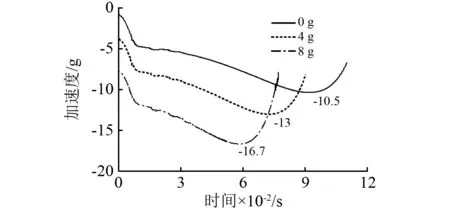
图8 弹射分离加速度曲线图Fig.8 Eject separating acceleration
图9为导弹弹射分离角速度曲线,导弹发射时要求相对载机具有向下倾斜的低头角速度,以保证载机的安全。从图9中可以看出在载机无机动发射时,弹射分离低头角速度为32.3°/s;在载机过载为4时发射导弹,弹射分离低头角速度为30°/s;当载机过载为8时,弹射分离低头角速度为26°/s。因此可以看出,战机大机动高过载发射时,导弹弹射分离低头角速度会出现一定程度的降低,降低约20%。

图9 弹射分离角速度曲线图Fig.9 Eject separating angle velocity
图10为导弹弹射分离低头角度曲线,导弹发射时要求相对载机具有向下倾斜的低头角,以保证载机的安全。如图所示:在载机无机动发射时,弹射分离低头角度为1°;在载机过载为4时,弹射分离低头角度为0.84°;在载机过载为8时,弹射分离低头角度为0.7°。可以看出,战机大机动高过载发射时,导弹分离角度会明显减小,减小量达30%,威胁发射安全。为了保证发射安全性,在武器系统设计时对此应予以充分考虑。

图10 弹射分离角度曲线图Fig.10 Eject separating angle
通过以上对弹射分离参数的仿真分析可以看出:载机作大机动高过载发射时,弹射分离速度和分离加速度将增加,有利于发射安全性;但是分离角速度和角度将不同程度的降低,对发射安全性将产生明显影响,在武器系统设计时应予以充分重视。
2.2 大机动发射对结构强度设计影响研究
对导弹弹射分离过程中的战机和导弹受力进行研究,包括载机所受的弹射反作用力和导弹所受的弹射作动力。该研究为载机和导弹的结构强度设计提供理论依据。
图11为载机大梁与发射装置机械接口的Y向受力曲线。导弹在弹射过程中,载机大梁接口受到向上的弹射反作用力,在导弹分离后,发射装置各高速运动构件由于惯性将对载机大梁产生向下的拉力,直至在结构阻尼作用下趋于0。如图所示:随着大机动过载的增加,弹射过程中的反作用力峰值将降低,由16 000 N降低到14 500 N,在分离时,惯性产生的下拉力增加,由-5 800 N增加到-11 100 N。其原应在于:高过载离心力将加大导弹弹射分离速度,因此发射装置构件的运动速度也将增加,在导弹弹射分离后的运动机构缓冲止动阶段势必增大对载机接口的惯性拉力。

图11 载机接口受力曲线图Fig.11 Force of aircraft mechanical interface
图12为导弹与发射装置机械接口的Y向受力曲线。导弹在弹射过程中,导弹受到发射装置的弹射作用力,在导弹分离后,导弹受到发射装置的作用力为0。如图所示:随着载机大机动过载的增加,导弹所受弹射力基本不变。
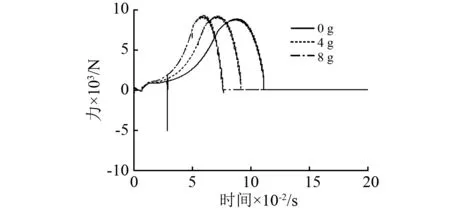
图12 导弹接口受力曲线图Fig.12 Force of missile mechanical interface
通过以上受力特性仿真分析可以看出:随着载机大机动过载的增加,载机接口受到的弹射反作用力将降低,但是高速运动构件产生的止动惯性拉力将增加,载机结构强度设计时应予以考虑。导弹在载机高过载时受到发射装置弹射作用力基本不变,不影响导弹强度安全设计。
3 结 论
针对隐身战机在大机动条件下的弹射发射动力学特性研究的严重不足,且考虑到多刚体动力学理论和运动-弹性动力学理论无法模拟该动力学特性,本文提出了一种大机动条件下的内埋弹射发射刚-柔-液耦合动力学建模方法,并通过该模型对其发射动力学特性进行了数值模拟,为隐身战机发射安全性和空空导弹初始弹道气动研究提供理论依据。本文主要结论如下:
(1)本文提出的刚-柔-液耦合动力学建模方法能够有效模拟隐身战机的大机动内埋弹射发射动力学特性;
(2)本文提出的构件级自由模态试验频率与仿真频率对比的方法能够有效保证整机级数值模型的仿真精度;
(3)大机动发射时,导弹弹射分离速度和加速度将会明显增加,有利于发射安全性;
(4)大机动发射时,导弹弹射分离低头角速度和低头角将会明显降低,威胁发射安全性;
(5)大机动发射时,载机在弹射时所受的反作用力将减小,但导弹分离后载机受到的运动机构惯性拉力将增加,载机结构强度设计时应予以重视;
(6)大机动发射时,导弹所受的发射装置弹射动力几乎与平飞发射相当,导弹强度设计不受影响。
[ 1 ] 刘刚, 肖中云,王建涛,等. 考虑约束的机载导弹导轨发射数值模拟[J]. 空气动力学学报,2015(2): 52-57.
LIU Gang, XIAO Zhongyun, WANG Jiantao, et al. Numerical simulation of missile air-launching process under rail slideway constraints[J]. Acta Aerodynamica Sinica,2015(2): 52-57.
[ 2 ] 王林鹏,王汉平,杨鸣,等. 运动导弹激励下柔性导轨振动的多体动力学分析法[J].航空学报,2014(3): 169-176.
WANG Linpeng, WANG Hanping, YANG Ming ,et al. Multi-body dynamics analysis method for vibration of flexible guide activated by moving missile[J]. Acta Aeronautica ET Astronautica Sinica,2014(3): 169-176.
[ 3 ] 李克睛,谭浩,王瑞凤. 导弹发射瞬时运动安全性分析[J]. 战术导弹技术, 2014(2): 28-33.
LI Kejing, TAN Hao, WANG Ruifeng. The safety analysis for processing of missile launch[J]. Tactical Missile Technology,2014(2): 28-33.
[ 4 ] 王小鹏. 静不稳定空空导弹导轨发射机弹分离数值模拟[J]. 计算力学学报, 2013,30(增刊1): 22-24.
WANG Xiaopeng. Numerical simulation on separation for statically unstable air-to-air missile by rail launch[J]. Chinese Journal of Computational Mechanics,2013,30(Sup1): 22-24.
[ 5 ] 廖莎莎,吴成. 机载导弹发射动力学建模与虚拟样机仿真[J]. 北京理工大学学报, 2011(9): 9-13.
LIAO Shasha, WU Cheng. Launching dynamics modeling of guided aircraft missile and virtual prototype simulation[J]. Transactions of Beijing Institute of Technology, 2011(9):9-13.
[ 6 ] 陈全龙,韩景龙,员海玮. 机载导弹导轨式发射过程安全性分析[J]. 振动与冲击,2013, 32(20): 41-47.
CHEN Quanlong, HAN Jinglong, YUN Haiwei. Security analysis of missile rail-launching from an aircraft[J]. Journal of Vibration and Shock, 2013, 32(20): 41-47.
[ 7 ] 许斌, 杨积东, 刘广, 等. 机载导弹弹射式发射建模与仿真[J]. 系统仿真学报, 2011, 23(7): 51-54.
XU Bin, YANG Jidong, LIU Guang , et al. Modeling and simulation of eject launcher for airborne missile[J]. Journal of System Simulation, 2011, 23(7): 51-54.
[ 8 ] LIKINS P W. Finite element append age equations for hybrid coordinate dynamic analysis [J].Journal of Solids and Structures, 1972(8): 790-831.
[ 9 ] LIKINS P W. Spacecraft attitude dynamics and control a personal perspective on early develop -ments[ J]. Journal of Guidance and Control, 1986, 9(2): 129-134.
[10] 陆佑方.柔性多体系统动力学[M].北京:高等教育出版社, 1996.
[11] 黄文虎,邵成勋. 多柔体系统动力学[M].北京:科学出版社, 1996.
[12] CHEN Wen. Dynamic modeling of multi-link flexible robotic manipulators [J]. Computers and Structures, 2001 (9):183-195.
[13] 刘明治,刘春霞.柔性机械臂动力学建模和控制研究[J]. 力学进展, 2001, 31 (1): 1-8.
LIU Mingzhi, LIU Chunxia. The study on dynamics modeling and contorl of flexible mechnical arms[J]. Advances In Mechanics, 2001, 31 (1): 1-8.
[14] 何辉.多参考最小二乘复频域法在飞行器模态参数识别中的应用[J]. 航空兵器,2010, 12(6): 7-11.
HE Hui. Applications of the polymax method in aerocrafts modal parameter estimation[J]. Aero Weaponry,2010, 12(6): 7-11.
猜你喜欢
航天电子对抗(2022年4期)2022-10-24 13:38:28
南京航空航天大学学报(2022年2期)2022-04-27 01:45:38
数字海洋与水下攻防(2021年5期)2021-11-04 06:06:14
装备制造技术(2020年3期)2020-12-25 05:21:52
装备环境工程(2019年7期)2019-08-21 01:51:10
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
现代防御技术(2016年1期)2016-06-01 12:13:27
火控雷达技术(2016年2期)2016-02-06 02:29:04
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50
