
基于相似度网络融合的极化SAR图像地物分类
2018-02-07 06:50邹焕新邵宁远秦先祥周石琳计科峰
系统工程与电子技术 2018年2期
张 月, 邹焕新, 邵宁远, 秦先祥, 周石琳, 计科峰
(1. 国防科学技术大学电子科学与工程学院, 湖南 长沙 410073; 2. 空军工程大学信息与导航学院, 陕西 西安 710077)
0 引 言
极化合成孔径雷达(synthetic aperture radar, SAR)能够全天时全天候工作,受到了广泛的关注,极化SAR图像解译也变得更加重要。而极化SAR图像分类是极化SAR图像解译的关键步骤之一,因此更加迫切需要对极化SAR图像分类方法进行研究。
根据处理单元的不同,可以将极化SAR图像的分类算法分为基于像素的算法[1-2]和面向对象[3-4]的算法。基于像素的算法是比较传统的算法,该类算法的优势在于能够有效地保留地物的边缘和细节,但是,该类算法会受极化SAR图像中相干斑噪声的影响从而影响分类精度,并且计算效率较低。而面向对象的分类算法是以区域作为处理单元的,能够有效地克服相干斑噪声的影响,进而获得较高的分类精度,并且相比于基于像素的分类算法具有较高的计算效率。因此,本文基于超像素开展极化SAR图像地物分类方法的研究。
根据分类时是否需要标记样本数据,又可以将极化SAR图像分类算法分为两类:监督分类算法和非监督分类算法。学者们已经提出了很多监督分类算法[5-9],这些方法能够达到较高的分类精度,但是训练过程需要大量的标记数据,而标记数据的过程非常耗时,而且自动化程度很低。相反,非监督分类算法不需要标记数据,因此,极化SAR图像的非监督分类算法的研究越来越重要。
在多种非监督分类方法中,谱聚类因其能够在任意形状的地物特征空间上取得较好的结果、且具有完善的数学框架[10]而应用较多。目前也已经提出了很多用于极化SAR图像的改进谱聚类算法,文献[11]基于谱聚类提出了利用模糊C均值聚类的隶属度构建模糊相似度矩阵的算法;文献[12]基于Wishart距离构建相似度矩阵进而对谱聚类算法进行改进;文献[13]基于解析信息论散度构建相似度矩阵改进了谱聚类算法。以上所有算法着眼于构建相似度矩阵时的距离度量或核函数的选择,而几乎忽略了不同特征向量之间的有效结合。
通常,将从极化SAR图像中提取的多种特征向量直接首尾堆叠从而形成一个高维特征向量,再基于距离度量构建相似度矩阵。然而,这样容易导致某些特征向量减弱甚至丧失对某些地物的分类能力[14]。多视学习[15]能够有效地结合多个不同视角数据的优点,使得多个视角数据的分类能力达到“强强联合”的效果。基于此,从极化SAR图像中提取的每个特征向量可以看作一个视角数据,从而可以将多视学习的方法引进到极化SAR图像的地物分类中。一致相似度网络融合(consensus similarity network fusion,CSNF)[16]是一种有效的多视学习算法,该算法通过网络交叉扩散的方式有效地结合多个不同视角数据生成一个融合了多个视角数据优点的相似度矩阵。相对于由每个视角数据独立形成的相似度矩阵来说,该融合后的相似度矩阵具有更强的地物判别和分类能力。
针对利用多种不同特征向量堆叠形成一个高维特征向量而导致部分原始特征向量分类能力减弱或丧失的问题,本文提出了一个基于CSNF的极化SAR图像非监督地物分类框架:首先,采用Pol-IER算法[17]对极化SAR图像进行超像素分割,从而利用区域信息克服相干斑噪声的影响;其次,基于超像素提取Krogager特征向量[18]、Yamaguchi4特征向量[19]、Cloude-Pottier’s 特征向量[20]、HSI颜色空间特征向量、由散射功率熵和同极化率堆叠的特征向量[2],并采用高斯核分别构建5个相似度矩阵;然后,采用CSNF通过网络交叉扩散的方式生成融合的相似度矩阵;再基于此相似度矩阵进行谱聚类获得初始聚类;最后,利用提出的分类后处理策略对初始聚类进行后处理操作,以修正误分的像素。本文的主要贡献如下:①将从极化SAR图像中提取的每个特征向量看作为描述极化SAR图像的一个不同视角的数据,从而可以利用多视学习算法来处理这些数据;②首次将多视学习算法中的一致相似度网络融合算法引入到极化SAR图像非监督地物分类方法研究中;③提出了一种新颖的分类后处理策略来修正误分类的像素,从而提高了地物的分类精度。最后,基于一幅仿真和一幅实测极化SAR数据,将本文算法与其他5种性能较优的算法进行了对比实验,验证了本文算法性能的优越性。
1 算法描述
本文算法可以分成5个步骤,主要包括:①超像素分割;②特征提取和相似度矩阵构建;③融合相似度矩阵生成;④谱聚类;⑤分类后处理。整个算法的流程如图1所示。
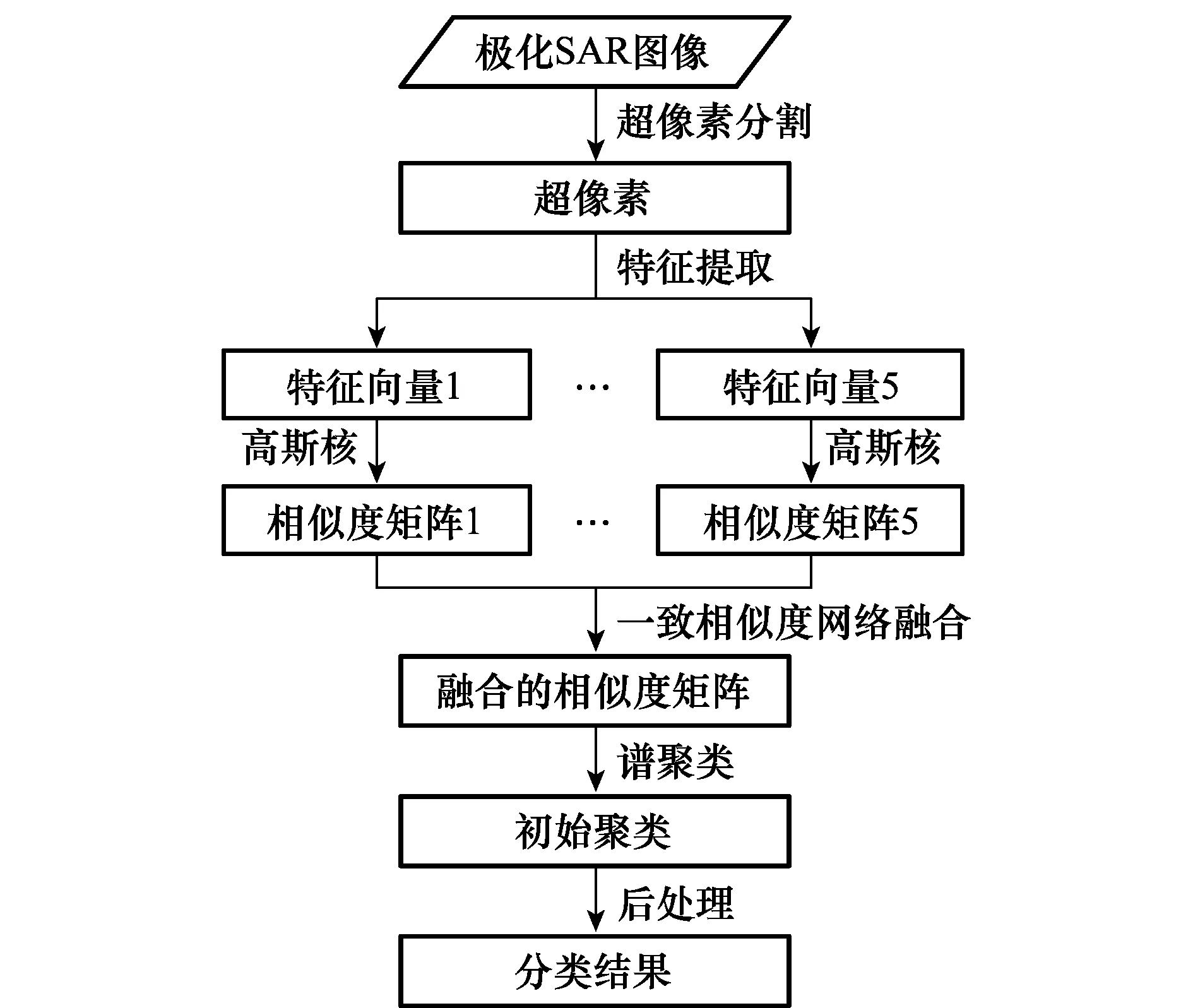
图1 本文算法流程图Fig.1 Flowchart of the proposed method
1.1 超像素分割
Pol-IER[17]算法是用于极化SAR图像的超像素快速分割算法,包括4个主要步骤:①初始化;②不稳定点局部K均值聚类;③更新超像素模型和不稳定点集;④分割后处理。Pol-IER算法的计算效率高,生成的超像素具有较高的边缘贴合度,且同质区域中超像素的形状比较规则。关于极化SAR图像的超像素快速分割算法的详细过程请参阅文献[17],在此不再赘述。
1.2 特征提取和相似度矩阵构建
在利用Pol-IER算法对极化SAR图像进行超像素过分割后,可以得到大量的超像素。为了更好地对每个超像素进行特征表示,采用了如下步骤:①计算极化SAR图像中每个像素点处的5个特征向量:Krogager特征向量[18]、 Yamaguchi4特征向量[19]、Cloude-Pottier’s 特征向量[20]、 HSI颜色空间特征向量以及由散射功率熵和同极化率堆叠的特征向量[2];②计算处于同一个超像素内的每个像素点的平均特征向量作为表示该超像素的特征向量。需要特别说明的是,本文目前仅考虑了5个特征向量。依据实际应用情况的不同需要,也可以提取其他不同数量的特征向量。因此,每幅极化SAR图像可以由5个M×L的特征矩阵表示,其中M表示图像中超像素的数目,L表示每个特征向量中的分量数目。利用高斯核函数,可以由这5个M×L的特征矩阵构建5个相似度矩阵。具体过程参见第1.3节。
1.3 一致相似度网络融合
CSNF是为了研究微生物之间的相互作用机制而提出的,其能够很好地集成和融合多视(多特征)数据的判别能力。本文将从极化SAR图像中提取的每个不同类型的特征向量作为一种不同视角下的数据,由于不同类型的特征向量对地物具有不同的判别和分类能力,因此,为了更好地实现极化SAR图像的地物分类,可以将CSNF引入到极化SAR图像的非监督地物分类方法研究中,从而可以通过CSNF算法将由多个视角数据独立形成的多个相似度矩阵融合成一个具有更强地物判别和分类能力的相似度矩阵。
假设从一幅极化SAR图像的每个像素点处均提取了N个不同类型的特征向量,在预先对极化SAR图像进行超像素过分割的基础上,处于同一个超像素区域内的每个像素点的特征向量的平均值可以作为表征该超像素的特征向量,因此,图像中的每一个超像素均可以用N个不同类型的平均特征向量来表示。进一步,极化SAR图像过分割得到的各个超像素之间的亲近关系可以用图模型G=(V,E)的形式来表示,其中V表示图的顶点(在此表示超像素),而E则表示连接任意两个顶点的边的权值。如前所述,由于图像中的每一个超像素均可以用N个不同类型的平均特征向量来表示,因此,可以构建N个不同的图模型G(v)=(V(v),E(v))(1≤v≤N),其中顶点V(v)对应于超像素的第v个平均特征向量,E(v)表示当超像素用第v个平均特征向量来表示时,任意两个超像素之间的亲近程度。由此,针对一幅给定的极化SAR图像,可以以这种方式构建N个相似度网络,而每一个相似度网络是由不同类型的特征向量构造的,因此具有不同的判别能力。如果将这N个相似度网络进行融合,则可以使得最终融合得到的相似度网络集成了每个相似度网络的强判别能力部分,从而对多种地物均具有很强的判别能力。对于极化SAR图像地物分类来说,也就是通过充分利用不同类型特征向量的判别和区分能力,达到提高地物分类精度的目的。
一致相似度网络融合的具体过程描述如下:假设过分割极化SAR图像得到的超像素个数为M。首先采用式(1)为极化SAR图像基于超像素的每一个不同类型的特征向量采用高斯核函数构建一个相似度矩阵W(v)(1≤v≤N)来衡量超像素之间的相似程度:
(1)

1≤i,j≤M
(2)
式中,mean(d(v)(i,Ni))是超像素i和其k近邻(knearest neighbors,k-NN)邻域超像素Ni之间的平均欧式距离,本文实验中根据经验取k=5。mean(d(v)(j,Nj))的意义与mean(d(v)(i,Ni))相似。
基于式(1)计算得到的W(v)(1≤v≤N),利用式(3)可以构建相应的归一化权重矩阵:
(3)
由式(3)可以看出,此归一化方法能够免受矩阵对角线元素所表示的自相似度的干扰,并且可以避免数据元素的不稳定性。

(4)
通过上述操作,所构建的C(v)可以滤除低相似度的边缘,消除噪声边缘的影响,且通过一致信息选择保留更稳定的局部信息。

; 1≤t≤Itermax
(5)

(6)
最终融合生成的相似度矩阵PFinal可以通过求取经过t次迭代后的N个平均特征矩阵所对应的归一化权重矩阵P(v)的均值获得,其表达式为
(7)
1.4 谱聚类
谱聚类算法是基于相似度矩阵的特征分解进而利用K均值算法进行聚类的,该算法能够在任意形状的(地物)特征空间上取得较好的结果,并且该算法的数学框架[10]比较完善。因此,本文将一致相似度网络融合生成的融合相似度矩阵作为谱聚类算法的输入,从而获得初始聚类结果,该算法的详细过程请参阅文献[10]。
1.5 后处理
基于CSNF生成的相似度矩阵进行谱聚类,尽管得到的初始聚类能够较好地区分出不同的地物类别,但是仍然可能存在一些误分的像素,尤其是地物边缘像素需要重新检验分类的正确性。基于此,本文提出了一种基于不相似度[17]的分类后处理策略。不相似度的计算公式如下:
(8)

本文提出的分类后处理策略是一个迭代的过程,在实验中最大迭代次数取值为20。在每次迭代中,对图像中的每个像素进行如下操作:首先,找出第i个像素的8-邻域像素的标签并将其存储到NLabel中;如果NLabel中只有两个不同的标签值:p和q,并且这两个标签值的数目相同,则计算第i个像素与聚类p的不相似度DS(i,Rp)以及第i个像素与聚类q的不相似度DS(i,Rq),其中Rp和Rq分别表示聚类p和聚类q。如果DS(i,Rp) 为了评估本文算法的性能,基于一幅仿真图像和一幅实测极化SAR图像进行了两组实验:分类后处理策略评估实验和6种分类算法的对比实验。参与对比的6种算法包括:基于像素的非监督K均值Wishart分类算法[1](unsupervised K-means wishart classification algorithm based on pixels,UKWC-P)、基于超像素的非监督K均值Wishart分类算法(unsupervised K-means wishart classification algorithm based on superpixels,UKWC-S)、面向像素的基于散射功率熵和同极化率的非监督分类算法[2](unsupervised classification based on scattering power entropy and copolarized ratio based on pixels,UCSC-P)、面向超像素的基于散射功率熵和同极化率的非监督分类算法(unsupervised classification based on scattering power entropy and copolarized ratio based on superpixels,UCSC-S)、基于特征堆叠的谱聚类算法(spectral clustering based on feature concatenation,FC) 以及本文算法(proposed method,PM)。为保证对比实验的公平性,所有实验中的类别数目均根据先验知识给定,前4种算法的实验参数根据相应论文的参数设定。在评估分类后处理策略时,虽然该策略对以上所有算法都有效,但是前4种算法的整体分类精度较低,因此我们着重评估了分类后处理策略对FC算法和本文算法性能的影响。 本文根据蒙特卡罗算法[22]仿真生成的极化SAR图像大小为500×700像素,其中9种地物类别的中心协方差矩阵取自参考文献[4],相应的Pauli-RGB图像和真值图分别如图2(a)和图2(b)所示。仿真图像采用Pol-IER算法进行过分割生成超像素时的初始网格边长S设置为10。 图2 仿真极化SAR图像Fig.2 Simulated Polarimetric SAR image 2.1.1 分类后处理策略的评估 针对FC算法(该算法没有分类后处理策略)和本文算法,对本文提出的分类后处理策略进行实验评估。在实验中采取4个度量来评估分类后处理策略的影响:用户精度(user accuracy,UA,表示在分类为第i类的所有像素中,其实测类型也是第i类的像素所占的比例)、制图精度(producer accuracy,PA,表示在所有实测类型为第i类的像素中,被正确地分类也是第i类的像素所占的比例)、总体精度((overall accuracy,OA)表示在所有样本中被正确地分类的像素比例))和Kappa系数((Kappa coefficient,K)综合了UA和PA用来评价分类图像的精度),实验结果如图3所示。其中,图3(a)和图3(b)中的横坐标表示图2(c)中的9种地物类别,图3(c)和图3(d)中的横坐标的“-P”表示未加分类后处理,“+P”表示进行了分类后处理。 图3 仿真图像后处理策略评估结果Fig.3 Evaluation results of the post-processing method based on the simulated image 观察图3(a)可以看出:经过分类后处理后,大部分地物类别的用户精度提高了,也有少数地物类别的用户精度降低了,但是提高的幅度远高于降低的幅度,观察图3(b)也能得到相似的结论。如图3(c)和图3(d)所示,这些变化导致整幅图像的总体精度和Kappa系数的提高。通过比较FC算法和本文算法未加分类后处理和进行分类后处理的4个评估度量参数,验证了本文提出的分类后处理策略是有效的。因此,后续实验中的FC算法都添加了本文提出的分类后处理策略,以进一步验证本文算法的优越性。 2.1.2 6种分类算法的评估 为评估本文算法的性能,将UKWC-P、UKWC-S、UCSC-P、UCSC-S、FC和本文算法共6种非监督分类算法在仿真极化SAR图像上进行了对比实验,其实验结果仍然基于UA、PA、OA和K 4个度量进行评估,结果如图4所示。 图4 仿真极化SAR图像6种算法的实验结果Fig.4 Results of the six methods based on the simulated Polarimetric SAR image 从图4(a)中可以看出:UCSC-P、FC和本文算法的用户精度曲线远高于其他3种算法的,并且UCSC-P的用户精度值普遍低于FC和本文算法的。结合图3(a)可以看出,本文算法得到的分类结果中,9种地物类别的用户精度普遍高于FC算法的,说明本文算法分类结果的用户精度最好。图4(b)和图3(b)的制图精度曲线与用户精度曲线相似,因此本文算法分类结果的制图精度最高。6种算法分类结果的总体精度和Kappa系数分别如图4(c)和图4(d)所示,可以看出本文算法分类结果的总体精度和Kappa系数都是最高的,这主要得益于本文算法从极化SAR图像中提取了5种不同类型的特征向量,并采用一致相似度网络融合多视学习算法将5种不同类型的特征向量所具有的判别和区分能力进行了有效的融合增强。综上所述,就制图精度、用户精度、总体精度和Kappa系数4个评估度量标准而言,本文算法的性能优于其他5种非监督分类算法的性能。 为进一步评估本文算法的性能,基于一幅实测极化SAR图像对上述6种算法进行了对比实验。该实测图像为ESAR拍摄的L波段极化SAR图像,拍摄地区位于Oberpfaffenhofen测试区,图像大小为1 300像素×1 200像素,其Pauli-RGB图像如图5(a)所示。因为无法获取该实测极化SAR图像的真值图,因此在展示分类结果时,将每个像素点的颜色用其所分聚类的平均颜色来取代,则所示结果图像与原图像越相近说明分类结果越好,分类结果如图5所示。 图5 实测极化SAR图像上6种算法的分类结果Fig.5 Results of six methods based on the real-world Polarimetric SAR image 从图5(b)中可以看出图中存在很多孤立的小区域,这说明UKWC-P算法的分类结果受极化SAR图像中存在的相干斑噪声影响严重,而图5(c)中很多地物边缘和同质区域呈现破裂不完整的现象,如图中下方中间区域的倒三角区域呈现被破坏的状态,这说明UKWC-S算法不能得到较好的分类效果。观察图5(b)、图5(c)、图5(f) 3幅图像,可以看出右上角的机场跑道被“阻塞”,这说明这3种算法对细长的区域和边缘分类效果较差。为进一步对比实验结果,将图5中的A、B、C 3块区域放大如图6所示。观察图6(a)~图6(g)中的区域A中从上到下浅红、深红、蓝色3个区域块,只有图6(g)分出了这3个区域,且对应的颜色正确,这说明本文算法对相近类别的分类能力强于其他5种算法。对于图6(h)~图6(n)中的区域B,可以看出只有本文算法得到的分类结果与原始图像相似,这说明只有本文算法能将这块区域聚类正确。对于图6(o)~图6(u)中的区域C,图6(p)和图6(u)得到此区域的形状与图6(o)(原始极化SAR图像的区域C)的基本相同,其他4种算法在此区域分类结果的形状已失真,说明较多像素分类错误。但比较图6(o)、图6(p)、图6(u) 3幅图中的C区域,可以看出图6(p)的颜色相较于图6(o)已经很不相同,这说明UKWC-P算法将很多其他类别的像素误分入此类中,而图6(u)中此区域的颜色和图6(o)中相近,说明本文算法较为准确地为此地物类别聚类。结合上述分析,可以看出本文算法相较于其他算法在此实测极化SAR图像上分类效果较好,能够将易于混淆的地物类别分开,而边缘像素也能较好地保留,这是由于本文算法能够较好地结合多种不同类型的特征向量具有不同判别和区分能力的优点,具有较强的分类能力,并且提出的分类后处理策略能够将初始误分的像素类别标签进行修正,从而达到较好的分类性能。 图6 实测极化SAR图像上6种算法分类结果的3块区域局部放大图Fig.6 Three enlarged patches of the results of six methods based on the real-world Polarimetric SAR image 本文针对将多种不同类型特征向量直接堆叠形成一个高维特征向量用于极化SAR图像分类,容易导致某些特征向量分类能力减弱或者丧失的问题,提出了将每种特征向量作为一种不同视角的特征数据,首次采用多视学习中的一致相似度网络融合算法将从极化SAR图像中提取的5种不同类型的特征向量分别形成的5个相似度矩阵进行基于交叉扩散过程的融合,生成判别和分类能力较强的相似度矩阵,进而进行谱聚类,最后,对聚类结果利用提出的分类后处理策略进行处理,较好地修正了误分像素的类别标签,提高了地物分类的精度。基于一幅仿真图像对分类后处理策略的性能进行了评估,采用用户精度、制图精度、总体精度和Kappa系数等4个度量参数,验证了本文提出的分类后处理策略的有效性。此外,基于一幅仿真图像和一幅实测极化SAR图像,将本文算法和其他5种较优的极化SAR图像非监督分类算法进行了对比实验,验证了本文算法分类性能的优越性。然而,需要指出的是,由于本文算法提取了5个不同类型的特征向量用于分类,在进行交叉扩散以获得融合的相似度矩阵时,计算效率还有较大的提升空间;此外,如何合理地选择不同数量、不同类型的特征向量以生成判别和分类能力强的融合相似度矩阵,也是需要进一步深入研究的问题。 [1] LEE J S, GRUNES M R, POTTIER E, et al. Unsupervised terrain classification preserving polarimetric scattering characteristics[J]. IEEE Trans.on Geoscience & Remote Sensing, 2004, 42(4):722-731. [2] WANG S, LIU K, PEI J, et al. Unsupervised classification of fully polarimetric SAR images based on scattering power entropy and copolarized ratio[J]. IEEE Geoscience & Remote Sensing Letters, 2013, 10(3):622-626. [3] WU Y, JI K, YU W, SU Y. Region-based classification of polarimetric SAR images using Wishart MRF[J]. IEEE Geoscience & Remote Sensing Letters, 2008, 5: 668-672. [4] LIU B, HU H, WANG H, et al. Superpixel-based classification with an adaptive number of classes for polarimetric SAR images[J].IEEE Trans.on Geoscience & Remote Sensing, 2013, 51(2):907-924. [5] DENG L, YAN Y, WANG C. Improved POLSAR image classification by the use of multi-feature combination[J]. Remote Sensing, 2015, 7(4):4157-4177. [6] ZHANG Y, ZHANG J, HUANG G, et al. Object-oriented classification of polarimetric SAR imagery based on texture features[C]∥Proc.of the International Symposium on Image and Data Fusion, 2011:1-4. [7] JI Y, CHENG J, LIU H, et al. An segmentation-based PolSAR image classification method via texture features and color features[C]∥Proc.of the IEEE International Radar Conference, 2015: 83-88. [8] ZHANG Y, ZHANG J, ZHANG X, et al. Land cover classification from polarimetric SAR data based on image segmentation and decision trees[J]. Canadian Journal of Remote Sensing, 2015, 41(1):39-49. [9] 邹焕新,秦先祥,周石琳,等. 基于区域Bhattacharyya相似度的SAR图像地物分类方法[J]. 系统工程与电子技术,2016,38(12):2752-2757. ZOU H X, QIN X X, ZHOU S L, et al. Terrain classification of SAR images based on Bhattacharyya similarity between regions[J]. Systems Engineering and Electronics,2016,38(12):2752-2757. [10] LUXBURG U V. A tutorial on spectral clustering[J].Statistics & Computing, 2007,17(4):395-416. [11] YANG Y, WANG Y, XUE X. A novel spectral clustering method with superpixels for image segmentation[J]. Optik-international Journal for Light and Electron Optics,2016,127(1):161-167. [12] ANFINSEN S N, JENSSEN R, ELTOFT T. Spectral clustering of polarimetric SAR data with the wishart-derived distance measures[J]. IEEE International Conference on Signal Processing, 2007: :830-833. [13] YANG X, YANG W, SONG H, et al. Superpixel-based unsupervised classification of PolSAR imagery using wishart mixture models and spectral clustering[C]∥Proc.of the 11th European Conference on Synthetic Aperture Radar, 2016: 1-4. [14] KUMAR A, III H D. A co-training approach for multi-view spectral clustering[C]∥Proc.of the International Conference on International Conference on Machine Learning, 2011:393-400. [15] WANG B, JIANG J, WANG W, et al. Unsupervised metric fusion by cross diffusion[C]∥Proc.of the Computer Vision and Pattern Recognition, 2012:2997-3004. [16] JIANG X, HU X. Inferring microbial interaction networks based on consensus similarity network fusion[J]. Science China Life Sciences, 2014, 57(11):1115-1120. [17] ZHANG Y, ZOU H, LUO T, et al. A fast superpixel segmentation algorithm for PolSAR images based on edge refinement and revised wishart distance[J]. Sensors, 2016, 16(10):1687. [18] KROGAGEr E. New decomposition of the radar target scattering matrix[J]. Electronics Letters, 1990, 26(18):1525-1527. [19] YAMAGUCHI Y, MORIYAMA T, ISHIDO M, et al. Fourcomponent scattering model for polarimetric SAR image decomposition[J].IEEE Trans.on Geoscience & Remote Sensing,2005,43(8): 1699-1706. [20] CLOUDE S R, POTTIER E. A review of target decomposition theorems in radar polarimetry[J]. IEEE Trans.on Geoscience & Remote Sensing, 1996, 34(2): 498-518. [21] PREMACHANDRAN V, KAKARALA R. Consensus of k-NNs for robust neighborhood selection on graph-based manifolds[C]∥Proc.of the IEEE Conference on Computer Vision and Pattern Recognition, 2013:1594-1601. [22] LEE J S, POTTIER E. Polarimetric radar imaging: from basics to applications[J]. Francis Group Boca Raton Isbn, 2009.2 实验结果与分析
2.1 基于仿真数据的实验
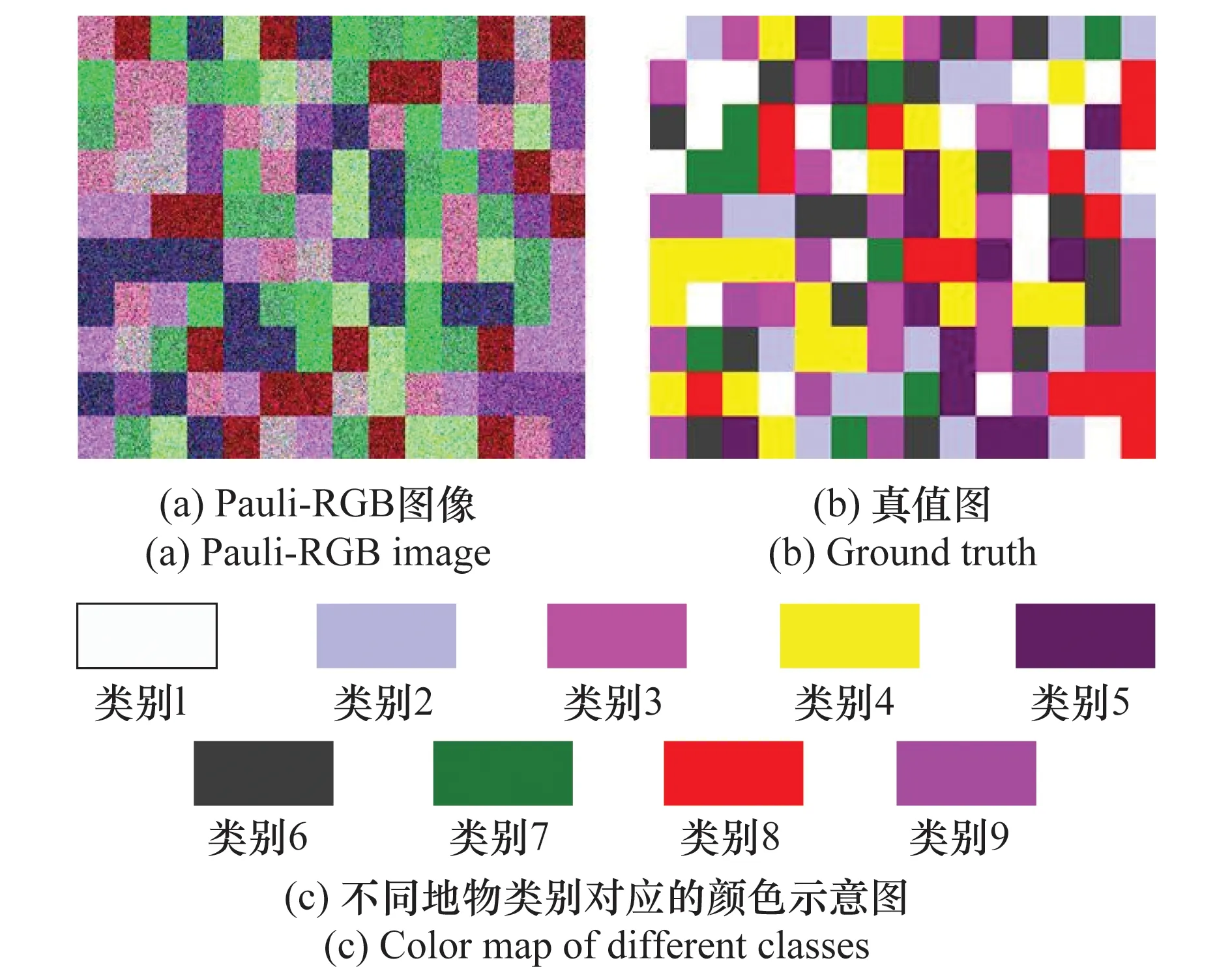

2.2 基于实测极化SAR数据的实验
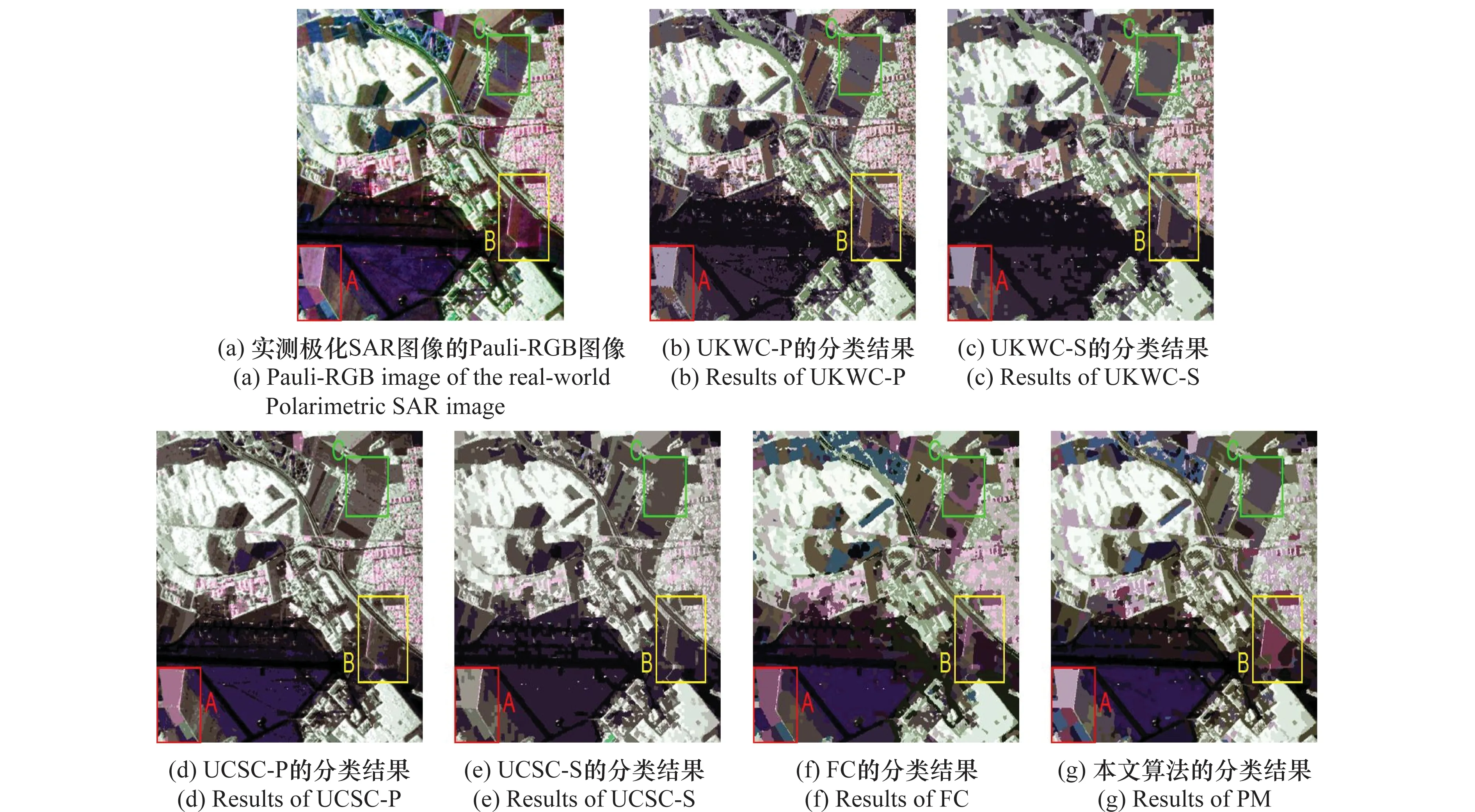

3 结 论
猜你喜欢
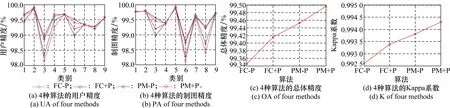
九江职业技术学院学报(2022年1期)2022-12-02
现代财经-天津财经大学学报(2022年5期)2022-06-01
航天电子对抗(2022年2期)2022-05-24
保定学院学报(2022年2期)2022-04-07
北京航空航天大学学报(2021年9期)2021-11-02
今日农业(2020年20期)2020-12-15
航天电子对抗(2019年4期)2019-06-02
数学大世界(2019年7期)2019-05-28
能源(2018年10期)2018-12-08
中华建设(2017年1期)2017-06-07
