主动自导水下航行器的高分辨宽带信号检测技术
2018-02-07 05:45许则富张绍阳
舰船电子工程 2018年1期
许则富 张绍阳
(中国船舶重工集团公司七五〇试验场 昆明 650051)
1 引言
主动自导水下航行器是具有自我航行能力、主动探测和目标搜索的水下的航行体,常见的如鱼雷、水下载人航行器以及无人水下航行器等。主动自导水下航行器能够完成水下勘探、侦测甚至是军事上的进攻防守等任务,特别是鱼雷等攻击性的水下航行器能实现主动搜索目标、控制雷体接近目标并攻击摧毁目标的功能,水下航行器在海洋开发、军事作战以及情报搜集等领域都具有很好的应用价值[1]。
主动自导水下航行器的目标识别过程是通过发射主动脉冲进行回波探测的过程,航行器发射主动声呐或者电磁脉冲信号,通过目标回波发射进行信号检测和目标识别,然而由于水下背景复杂,海水混响等干扰影响较大,导致对目标回波信号的检测准确性不好,水下航行器的目标检测是建立在高分辨波达方向(DOA)估计方法基础上的[2],传统方法中,对目标回波宽带信号检测方法主要有FFT检测方法、小波分析方法、分数阶傅里叶变换检测方法等[3-5],以局部平稳高斯色噪声混响模型为测试训练样本信号,结合相应的时频处理方法进行信号检测,取得了较好的检测性能,但上述方法在强干扰背景下的检测准确性不好,特别是对水下航行器目标回波宽带信号检测的分辨率不高。
针对上述问题,本文提出一种基于自小波变换的主动自导水下航行器的高分辨宽带信号检测技术,首先构建主动自导水下航行器的回波信号模型,在海水混响干扰下采用自相关匹配滤波器进行信号滤波处理,对滤波输出的宽带信号采用自小波变换进行时频分解,然后对水下航行器的回波探测信号作WVD-Hough变换,采用二维谱峰搜索方法实现高分辨的目标信号检测。最后进行仿真实验,展示了本文方法的优越性能。
2 宽带信号模型及信号滤波预处理
2.1 宽带信号模型构建
为了实现对主动自导水下航行器的目标识别和信号检测,首先构建目标回波模型,假设水下航行器的发射平台与主动存在相对运动的情形下,主动自导水下航行器看作为一个匀速运动点目标,得到水下航行器发射脉冲信号后宽带回波模型为

其中,f(t)为水下航行器的主动脉冲发射信号,s=(c-v)/(c+v)为回波信号时延尺度,表征了水下航行器发射信号的伸缩变化;τ=2R c,R为发射主动脉冲与打击目标之间的径向距离, s是归一化因子。
采用平方可积函数y(t)作为基函数,利用小波函数族ψa,b作为母小波,对发射的宽带信号进行自适应分离,其中ψ(t)的连续小波变换为

小波函数族ψa,b是由ψ(t)经过如下仿射变换得到

其中,因子1 ||a保证了宽带目标模型与小波变换之间的关联性,复杂运动目标回波在一段短的时间里,常可用LFM作为其一阶近似,使得该酉变换的能量归一化。
将发射信号 f(t)作为母小波函数ψ(t),并作变量代换a=1 s,b=τ,当目标回波发射系统与目标之间有相对运动,得到:

根据上式可见,宽带目标模型与小波变换有紧密的内在联系,可以根据采集的宽带目标回波模型,对目标进行检测、跟踪和成像处理。
2.2 信号滤波预处理
在海水混响干扰下采用自相关匹配滤波器进行信号滤波处理[6],海水混响采用正弦调频信号表示,混响的瞬时频率为时间的正弦函数:

式中β为正弦调频周期参数,K为正弦调频幅度参数,K=B/2,B为多普勒调制带宽。
在高信噪比条件下,使用SFM信号表示目标回波的宽带信号,其复指数形式为

设T为混响持续时间,水下航行器探测脉宽为Tp,分段数据段宽度TB。考虑信号的时间散布性和局部平稳性,输入脉冲信号的宽度TB必须与需检测信号的脉宽Tp相当,且TB>TP,对非平稳时变信号进行时频分析,相邻数据段的偏移量∆T≤TB-Tp。对数据进行分段后,对第k+1段信号进行匹配滤波,构造匹配滤波器如图1所示。
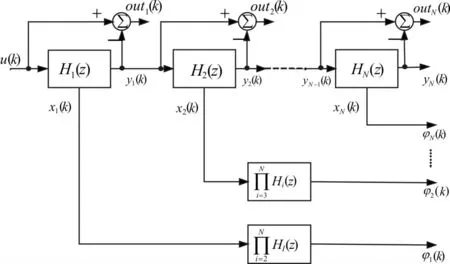
图1 自相关匹配滤波器
其中,滤波器的系统传递函数为

式中τ'为一未知量。将实信号s(t)转变为复信号z(t),在近场源中采用时间、相位和速度等三维参量表示目标信号的标量属性,其元素为

式中,“*”表示复共轭,把频率、角度和距离等相互独立取值,通过匹配滤波,得到滤波输出信号模型为

将其写为极坐标形式:

显然有:
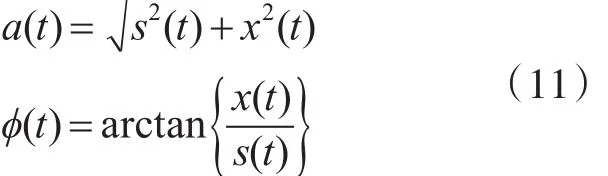
可见,采用匹配滤波检测器进行信号抗干扰处理,提高了信号的纯度,输出宽带信号与给定的实信号 s(t)=a(t)cosφ(t)相同。
3 信号检测算法实现
3.1 自小波变换
在构建主动自导水下航行器的回波信号模型,海水混响干扰下采用自相关匹配滤波器进行信号滤波处理的基础上,进行信号检测算法设计,本文提出一种基于自小波变换的主动自导水下航行器的高分辨宽带信号检测技术,对滤波输出的宽带信号采用自小波变换进行时频分解[7],利用调频规律为双曲函数进行宽带双曲调频信号的时延-尺度耦合,得到:

式中,c4si=cum{| si(t)|4}表示水下航行器探测目标信源si的峰度。若用C4S表示母小波函数的协方差矩阵,即:

知a(t)≥ | s(t)|,这表示a(t)的曲线“包着”代表|s(t)|的曲线,对于输出的宽带信号,奇异矢量满足0≤m,n≤P-1,有:

其中,A是一个维数为P×L的频谱正频流形向量矩阵,通过自小波变换,进行信号的时频分解,其第i列矢量可表示为

同理,采用DOA估计方法,得到水下航行器回波信号的时域与频域一一对应关系,给出各频率分量对应的奇异矢量构成Φ,Ω,Λ分别为

采用自小波变换得到输出信号频域特征的累计量矩阵C2,其元素C2(m,n)为

对于主动自导水下航行器的输出信号,把时域和频域组合在一起,得到输出非平稳信号统计特征量。
3.2 高分辨宽带信号检测
对水下航行器的回波探测信号作WVD-Hough变换,取主动自导水下航行器高分辨宽带信号时频特征两和4阶统计量,计算表达式分别为

其中,x(t)是滤波输出的宽带信号,Ex是信号能量,v是算术中心频率。
采用二维谱峰搜索方法进行高分辨的目标信号检测[8],得到矩形包络HFM信号的自小波变换满足:

对水下航行器的回波探测信号作WVD-Hough变换,写成矩阵形式:

根据时间尺度上的伸缩变化,构造如下的4P×4P矩阵:
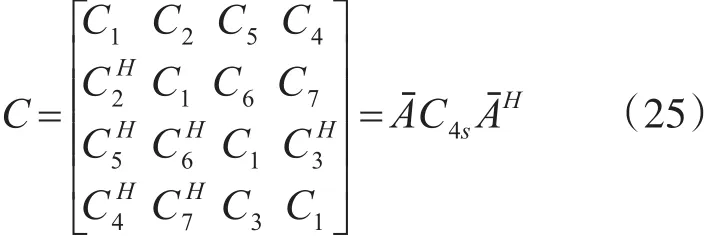
式中 Aˉ=[AH,(A Λ )H,(A Ω )H,(A Φ)H]H,其瞬时频率 fia(t)与母小波瞬时频率存在互相关性,对其进行特征分解:

式中,E=[e1,e2,…e4P]为尺度平移平面上(a,bm)点 处 的 小 波 变 换 酉 矩 阵 ;∑=diag[σ1,σ2,…σ4P]为特征值组成的对角矩阵,且:

由此得到水下航行器的高分辨宽带信号检测输出为

4 仿真实验与结果分析
为了测试本文方法在实现主动自导水下航行器宽带信号检测中的应用性能,进行仿真实验,实验采用Matlab仿真软件设计,信号的形式为矩形包络的线性调频信号,信号的时宽0.01s,相对带宽0.4,采样频率为196.608kHz,基带信号频率为2~6kHz,选取10倍抽取,采样频率降为19.6608kHz,信噪比为SNR=-7dB,根据上述仿真环境和参量设定,进行信号检测仿真实验,得到输入宽带信号的时域波形、频谱及瞬时频率以及滤波输出信号如图2所示。
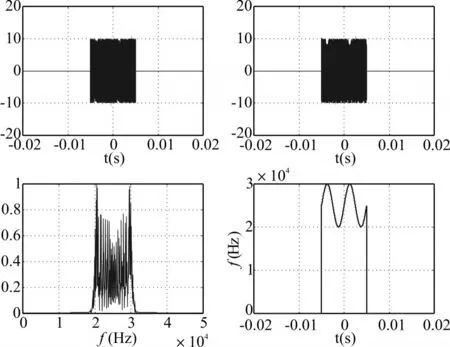
图2 宽带信号的时域波形、频谱、滤波输出及瞬时频率
分析图2得知,采用而本文方法进行主动水下航行器的回波信号检测,采用自相关匹配滤波器进行信号滤波处理,输出信号的分辨能力较高。为了对比检测算法的检测性能,采用本文方法和传统方法进行信号检测,得到信号的输出频谱图如图3所示。
对比图3结果得知,采用本文方法进行信号检测,对旁瓣的抑制能力较强,输出信号频谱的波束集成能力较好,具有较高的信号频谱分辨能力,从而提高了宽带信号检测的准确检测概率,检测性能优于传统方法。
5 结语
本文研究了主动自导水下航行器回波宽带信号检测技术,提出一种基于自小波变换的主动自导水下航行器的高分辨宽带信号检测技术,构建主动自导水下航行器的回波信号模型,在海水混响干扰下采用自相关匹配滤波器进行信号滤波处理,对滤波输出的宽带信号采用自小波变换进行时频分解,对水下航行器的回波探测信号作WVD-Hough变换,采用二维谱峰搜索方法实现高分辨的目标信号检测。研究表明,采用本文方法进行主动自导水下航行器的宽带信号检测的准确检测概率较高,抗旁瓣干扰能力较强,对打击目标的具有高分辨识别能力,在水下目标识别中具有很好的应用价值。

图3 宽带信号检测输出频谱
[1]王洪迅,王士岩,王星,等.瞬时测频系统的线性调频信号分析及改进[J].兵工学报,2014,35(8):1193-1199.
[2]HEY,ZHANGCS,TANGX M,et al.Coherent integra⁃tion loss due to pulses loss and phase modulation in pas⁃sive bistatic radar[J].Digital Signal Processing,2013,23(4):1265-1276.
[3]刘建娟.水下航行器组合导航蔽障控制器的设计与实现[J].舰船科学技术,2017,39(2A):64-66.
[4]宋军,刘渝,薛妍妍.LFM-BPSK复合调制信号识别与参数估计[J].南京航空航天大学学报,2013,45(2):217-224.
[5]陈雯雯,王亚林,周杰.三维统计信道中的多普勒效应及其信号分析[J].计算机科学,2017,44(3):84-88,131
[6]邸珩烨.基于多径码间干扰滤波的短波通信优化[J].物联网技术,2015,5(10):47-48,52.
[7]郑振,王丽媛,周勇.混沌理论研究及其在舰船目标识别中的应用[J].舰船电子工程,2013,33(5):48-50.
[8]闫源江,胡光波.关联维估计在舰船辐射噪声特征提取中 的 应 用[J].科 学 技 术 与 工 程 ,2010,10(27):6756-6759.
猜你喜欢
水下无人系统学报(2022年4期)2022-09-07
计算技术与自动化(2022年1期)2022-04-15
智能计算机与应用(2021年5期)2021-10-05
现代电子技术(2020年13期)2020-08-07
火力与指挥控制(2020年5期)2020-06-28
科技传播(2019年21期)2019-11-12
电脑知识与技术·经验技巧(2019年3期)2019-06-25
现代防御技术(2019年2期)2019-05-06
舰船电子工程(2018年10期)2018-10-23
剧作家(2018年2期)2018-09-10