
双雷齐射时前雷航行噪声对后雷主动声自导检测的影响分析与对策
2022-09-07 04:05:58邓新文
水下无人系统学报 2022年4期
邓新文,谢 勇
(中国人民解放军91388 部队,广东 湛江,524022)
0 引言
潜艇反潜是反潜作战的重要方式,随着世界各国潜艇减振降噪技术的发展及其在工程实践中的深入运用,当前潜艇辐射噪声水平多为低噪声与安静型,且噪声特征不明显,导致潜艇对潜攻击存在发现距离近、识别判型时间长与目标运动要素解算误差大的客观现实[1]。因此潜艇通常采用主动声自导鱼雷双雷齐射的方式实施对潜鱼雷攻击,以扩大鱼雷搜索带与遮盖较大的目标散布[2],达到先敌攻击与首攻奏效的目的[3]。
目前关于潜艇双雷齐射研究主要是围绕避免双雷互导展开的[1-5],但对邻雷航行噪声干扰与对策的研究还较少。文中针对主动声自导鱼雷双雷齐射时,前雷航行噪声对后雷自导检测的影响进行了理论建模与仿真计算分析,进而讨论了在实际作战中的应对策略。
1 主动声自导双雷齐射组织实施方法
1.1 双雷齐射方法
鱼雷齐射有扇面齐射和平行航向齐射2 种。扇面齐射如图1 所示,两雷主航向成一定夹角,使两雷自导扇面在齐射中线与目标航向线交点处相衔接[4],两雷只需一次转角,组织实施较为简单,但齐射效果依赖于目标运动要素的解算准确程度。图中:W为发射点;M为目标艇位置;Vw为发射艇航速;Vm为目标艇航速;Qm为目标艇舷角;α为鱼雷主航向与齐射中线夹角;λ为自导扇面角;R为自导作用距离。

图1 扇面齐射示意图Fig.1 Diagram of spread salvo
平行航向齐射如图2 所示,两雷按齐射时间间隔先后依次出管,先执行一次转角按齐射散角在主航向两侧展开,走完预定航程后再执行二次转角转入与齐射主航向平行的航向上,以一定的齐射间距平行向前搜索目标,组织实施相对扇面齐射多了二次转角。随着鱼雷控制技术水平的不断提高,平行航向齐射因具有较好的攻击效果,成为主动声自导鱼雷双雷齐射的主要组织实施方法[5]。
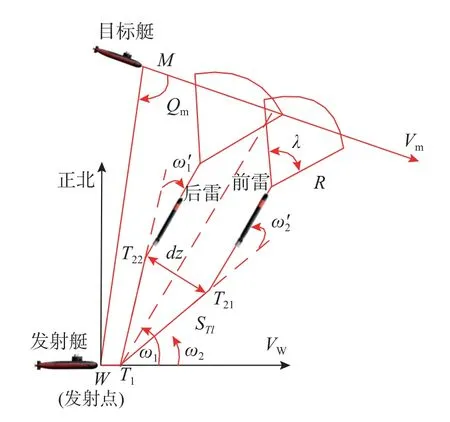
图2 平行航向齐射示意图Fig.2 Diagram of parallel salvo
1.2 平行航向齐射的组织实施
如图2 所示,发射艇实施双雷平行航向齐射时位于W点,目标艇位于M点,两雷按照齐射时间间隔dt依次出管执行初始弹道后,沿发射航向直航一段距离[6],在T1点按一次转角ωi(i=1,2)转向直航展开,航行直航距离STl后两雷到达T21、T22两点[7],随后执行二次转角[8],鱼雷转向至主航向后间距为dz,待到达自导开机距离后自导开机搜索目标。此时前雷在主航向上与后雷距离为 ∆d,鱼雷航速为Vt,两雷斜距为ds,如图3 所示,∆d与ds计算如下


图3 对后雷检测影响示意图Fig.3 Diagram of the impact on the latter torpedo ’s detection
2 对后雷主动声自导检测的影响分析
2.1 影响模型构建
因两雷按齐射时间间隔依次出管,先发射出管鱼雷将位于后发射出管鱼雷的侧前方,虽然鱼雷自导系统具有发射/接收指向性,但由于有旁瓣的存在,前雷航行噪声仍将被后雷自导系统接收[9],从而提高后雷自导系统对探测的背景噪声[10],降低后雷主动声自导作用距离,如图3 所示。
主动声呐方程是基于能量准则,由一个基本等式来定量反应水声系统的设备性能、信道影响与目标特性三者之间的数量关系[11],分为噪声掩蔽下的主动声呐方程与混响掩蔽下的主动声呐方程。考虑前雷航行噪声干扰,文中基于噪声掩蔽下的主动声呐方程进行分析

式中:SL为鱼雷主动声自导声源级;TL为传播损失;TS为潜艇目标强度;NL为鱼雷干扰噪声级;DI为鱼雷声自导接收指向性指数;DT为鱼雷自导检测阈。
鱼雷在某一具体的海洋战场时空环境下进行对潜攻击时,SL、DI、DT与NL是相对固定不变的,将常量左移,变量右移,得

由式(3)可知,若确定了鱼雷干扰噪声级,则可计算出传播损失TL,进而由传播损失与距离的关系换算出自导作用距离。通常可假定鱼雷搜索深度与目标艇航行深度相差不大,工程上可用球面扩展加吸收损失估算传播损失,即

式中:R为传播距离;β为对数吸声系数。
随齐射时间间隔的不同,前雷与后雷的态势也不同,从而对后雷的主动声自导作用距离缩短程度不一。若已知鱼雷在干扰噪声级NL0(含自噪声和环境噪声的总噪声级)时对应的主动声自导作用距离为R0,则可由式(5)计算出干扰噪声级NL1时对应的自导作用距离R1,即

鱼雷航行噪声具有方向性,通常呈蝴蝶形,雷头与雷尾方向较弱,记不考虑前雷噪声影响时的后雷干扰噪声级为NLt20、前雷航行噪声级为NLth1、噪声声压分布系数为F(θ2),θ2为后雷方位与前雷航向的夹角。假定前雷航行噪声传播到后雷的传播损失按球面扩展加吸收损失来估算,鱼雷声自导接收指向性指数为DI(θ1),θ1为前雷方位与后雷雷顶平面的夹角,则后雷接收到前雷航行噪声干扰噪声级为

可得后雷主动声自导系统接收到的总干扰噪声级为[12]

2.2 案例计算分析
以意大利“黑鲨”鱼雷为例,其航行速度Vt为52 kn,假定其鱼雷干扰噪声级NL0为52 dB 时对应的主动声自导作用距离R0为1 000 m、在鱼雷声自导接收频段内宽带航行噪声级NLt为150 dB、齐射间距dz为700 m,对数吸声系数 β为3 dB/km。假设主动声自导接收指向性指数与发射指向性指数一致并采用文献[13]中的测量数据,航行噪声声压分布系数采用文献[14]中计算模型,计算得到主动自导作用距离随齐射时间间隔变化规律如图4所示。
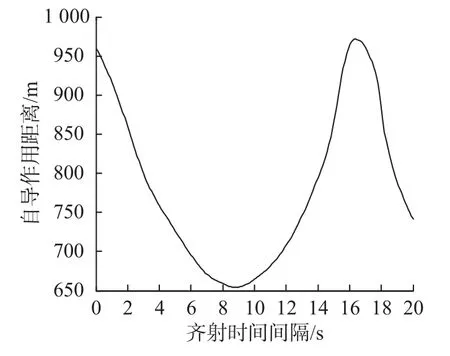
图4 后雷主动声自导作用距离随齐射时间间隔变化曲线Fig.4 Curve of the active acoustic homing acquisition range of the latter torpedo changing with the interval between two launches of torpedoes
由图4 可知,主动声自导作用距离先随齐射间隔时间增大而减少,在9 s 时下降至最小值655 m后随齐射间隔时间增大而增大,在齐射时间间隔大于16 s 后,又随齐射间隔时间增大而减少。主要原因是齐射时间决定前后两雷的纵向间距,使得前雷方位与后雷轴向的夹角随之变化,进而因后雷接收指向性与前雷航行噪声指向性综合导致后雷自导作用距离随齐射时间间隔呈曲线变化。因此,在其他条件一定时,齐射时间间隔决定了前雷航行噪声对后雷主动声自导作用距离的影响程度,使得后雷主动声自导作用距离缩短,导致不能发现目标潜艇,达不到预期的齐射作战效果。
3 作战使用建议
综合前文分析可知,前雷航行噪声将被后雷声自导系统接收从而降低后雷主动声自导作用距离,当某一齐射时间间隔使前雷相对后雷的方位恰好处于后雷声自导旁瓣轴方位,将会对后雷自导检测有较大的影响,因此可通过控制齐射时间间隔与雷速来调整前后雷态势并降低前雷航行噪声级,达到降低影响的目的。具体建议有以下2 点:
1) 由于两雷存在航行速度误差、航向误差,两雷态势很难通过增大齐射时间间隔来实施精准控制,使前雷处于后雷声自导接收波束相邻旁瓣中间,且齐射时间间隔的增大也很难达到两雷同时捕获目标的预期目的,因此可在前雷发射出管不对后雷产生干扰影响的前提下,尽可能地缩短齐射时间间隔,实现两雷近似同时出管;
2) 可视情降低两雷搜索速度,采用低速搜索接敌的方式,降低前雷航行噪声,减少其对后雷自导检测的干扰,同时也有利于增大自导作用距离,提高齐射发现概率。
4 结束语
通过分析声呐方程与主动声自导检测原理,基于双雷齐射运动态势构建了相应的计算模型,算例表明:前雷航行噪声对后雷主动声自导作用距离有较大的影响,影响程度随齐射时间间隔的变化而不同。最后就实战中如何降低前雷航行噪声对后雷的影响给出了作战使用建议。文中所做研究可为潜艇指挥员实施主动声自导鱼雷双雷齐射与设计人员进一步研究双雷齐射提供参考。
猜你喜欢
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27 09:22:30
小哥白尼(军事科学)(2021年8期)2021-11-22 07:58:22
智能计算机与应用(2021年5期)2021-10-05 12:45:18
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
军事运筹与系统工程(2017年1期)2017-07-31 18:19:00
计算机测量与控制(2017年6期)2017-07-01 16:23:53
电子制作(2017年24期)2017-02-02 07:14:16
法大研究生(2015年2期)2015-02-27 10:13:55
