
基于Matlab的电阻炉温度模糊控制系统设计及仿真
2018-01-25 10:21张立众马永翔
哈尔滨商业大学学报(自然科学版) 2017年6期
张立众, 马永翔
(陕西理工大学, 陕西 汉中723003)
温度控制一直以来就是工业生产过程中一个非常重要的环节.以前都是采用传统控制结合比较简单的控制算法,从而达到实现自主调节温度的要求.而温度的单向升温性以及滞后大惯性大等特点则使得传统控制理论已经无法满足控制要求.为了克服以上缺点,在温度控制系统中引用了模糊控制,用模糊控制器代替经典控制器,控制效果得到了明显的改善.
随着现代工业(像机械、化工以及冶金等工业)制造的迅速发展,电加热炉在许多领域中也有了更加普遍的运用.但是温度控制存在滞后、惯性大、非线性大等不利因素,传统控制无法解决这些问题,而自适应积分分离PID控制不仅算法简单,控制结果简单,效果显著,就连计算量也小,而且静动态性能指标好,完全可以解决上述问题.
当系统是非线性时变系统时,单纯的PID算法就能够得到比较理想的效果.可是,当系统模型为参数时变系统时,运用参数已经调整好的PID控制器,不仅系统控制性能会变差,更可能导致系统不稳定.模糊控制器虽然能够应用于被控对象为非线性与时变性的系统,并拥有较好的鲁棒性,但是稳态控制精度比较差,很难实现精确控制,尤其在平衡点附近.模糊控制器没有积分控制,系统静差难以消除.因此,单纯的采用模糊控制同样不能得到想要的控制效果.于是,工业过程控制中大多都是把模糊控制器和其他控制器结合使用,本文所采用的所用的本文将模糊控制和PID控制结合起来,构建自适应模糊PID控制器,来控制电阻炉温度就能够很好地弥补上述两个方法的缺陷[1-3].本文通过使用Matlab/SIMULINK这个软件来搭建传统PID温度控制系统与自整定模糊PID温度控制系统的模型,对其进行仿真分析,从仿真结果可知模糊PID控制系统相比传统PID控制系统,控制速度要快,稳定性要高,更有应用价值.
1 模糊控制系统的组成及被控对象
模型确立
如今的工业控制控制过程中普遍存在着时滞现象.但是许多的时间常数特别大的系统可以运用纯滞后环节与一些时间常数去近似.电加热炉温度控制系统就可以用阶跃响应来表示.被控对象的数学模型所用传递函数可以用式(1)表示:
(1)
由于电加热炉具有时变,非线性以及分布参数等特性,因而作为被控对象是非常复杂的.
工作原理:被热电偶检测到温度值变成毫伏的电压信号值,被温度变送器放大然后进入A/D转换器,并将其转换成数字量再送入计算机,通过与与设定值进行比较,经PID调节后,输出驱动信号,从而控制光控可控硅的导通与否.如果检测所得实际值比给定值要高就报警,如果比给定值要低那么就继续加热,以此来实现温度的控制[4-5].
采用对过程对象施加阶跃输入信号,测取过程对象的阶跃响应,然后根据阶跃响应曲线确定过程的近似传递函数[6],得到电阻炉模型为
由于模糊控制算法也属于计算机数字控制算法当中的一种,所以它的系统组成与数字控制系统结构形式基本相同,模糊控制系统通常有5部分:模糊控制器、I/O接口装置、执行机构、被控对象和检测装置.
1.1 建立温度模糊控制器
模糊控制器的输入变量是温度偏差,是指实际测量温度与给定温度之差e及偏差变化率ed.输出脉冲宽度调制信号控制发热电阻的功率大小,从而调节温度箱内温度的高低升降,形成双输入单输出二维的模糊控制器 .
模糊控制器建立过程:
随着当前医疗技术水平的不断发展,剖宫产已经成为了一种比较常见的分娩方式,能够降低患者的疼痛,排除一些其他的危险因素,保证产妇以及新生儿的生命安全,目前的应用十分广泛[1]。在这种情况下,疤痕子宫产妇的数量出现了显著的增加,再次分娩当中方式选择更为重要,这是因为与非疤痕子宫产妇来说,疤痕子宫产妇进行再次剖宫产的过程中,会存在比较大的危险性,对产妇的生命安全产生了一定的威胁[2]。因此,本研究于收治的剖宫产产妇中进行抽样,选取108例疤痕子宫再次妊娠二次剖宫产作为对照组,同期选取108例非疤痕子宫剖宫产作为观察组,对疤痕子宫再次妊娠二次剖宫产与非疤痕子宫剖宫产的情况进行对比探究。
1)首先运用Matlab中的FIS编辑器 ,来建立温度箱的Mamdani型模糊控制器.温度偏差e和温度偏差变化率ec及输出变量u的语言变量E,EC,U都一律选择为{NB,NM,NS,Z,PS,PM,PB},其中P表示正和N分别表示负,B,M,s分别表示大、中、小,z表示0 .
通过e、ec和u实际的基本论域,E、EC和U论域都设定为[-3,3],从而确定出量化因子Ke、Kc和比例因子Ku.
2)控制决策隶属函数的建立
采用系统默认值来处理模糊控制决策及解模糊方法的问题,就是极大极小合成运算与重心法解模糊的方法.输出变量的模糊集合是由模糊控制决策公式求出:U=(E×EC)R.
隶属函数一律采用三角形,E和Ed和EC的量化论域都是[-3,3];不同的系统有着不同的模糊集的隶属函数是, 要根据具体情况而定.
本次模糊控制器采用Mamdani推理型. 它属于双输入、单输出结构: 输入量E是设定的电阻炉温度值与采样值之间的偏差 和温度偏差值的变化率EC;输出量U为温度控制量.
4)系统模糊控制规则建立的基本原则
当温度偏差e较大时,以尽快消除误差为主选择控制量;当温度偏差e较小时,要注意遵守防止超调的原则选择控制量,主要出发点以系统的稳定性为主.具体包括:①精确量的模糊化过程. ②模糊控制算法. ③模糊判决.
1.2 进行Matlab的仿真
在检验温度模糊控制器设计的性能中, 及时调整模糊控制器的控制规则和各项参数, 这是在Matlab 软件仿真中进行的.本次设计利用Matlab 软件中的Fuzzy Logic Too box 和Simulink 图形化工具平台, 实现电阻炉模糊控制设计与仿真.
首先建立好被控对象的数学模型.然后进行温度控制系统的仿真, 电阻炉温度控制系统的传递函数数学模型通常采用阶跃响应法来获得的,近似等效为带纯滞后的一阶对象.
(2)
模糊控制仿真的过程中, 温度箱模糊控制器的建立是通过Matlab的模糊逻辑工具箱来完成的,通过Simulink环境下把模糊控制器加载进相应模块, 完成仿真.量化因子Ke=0.005,Kec=0.05,Ku=-200,模糊控制器的封装以及阶跃响应曲线分别如图1、2.
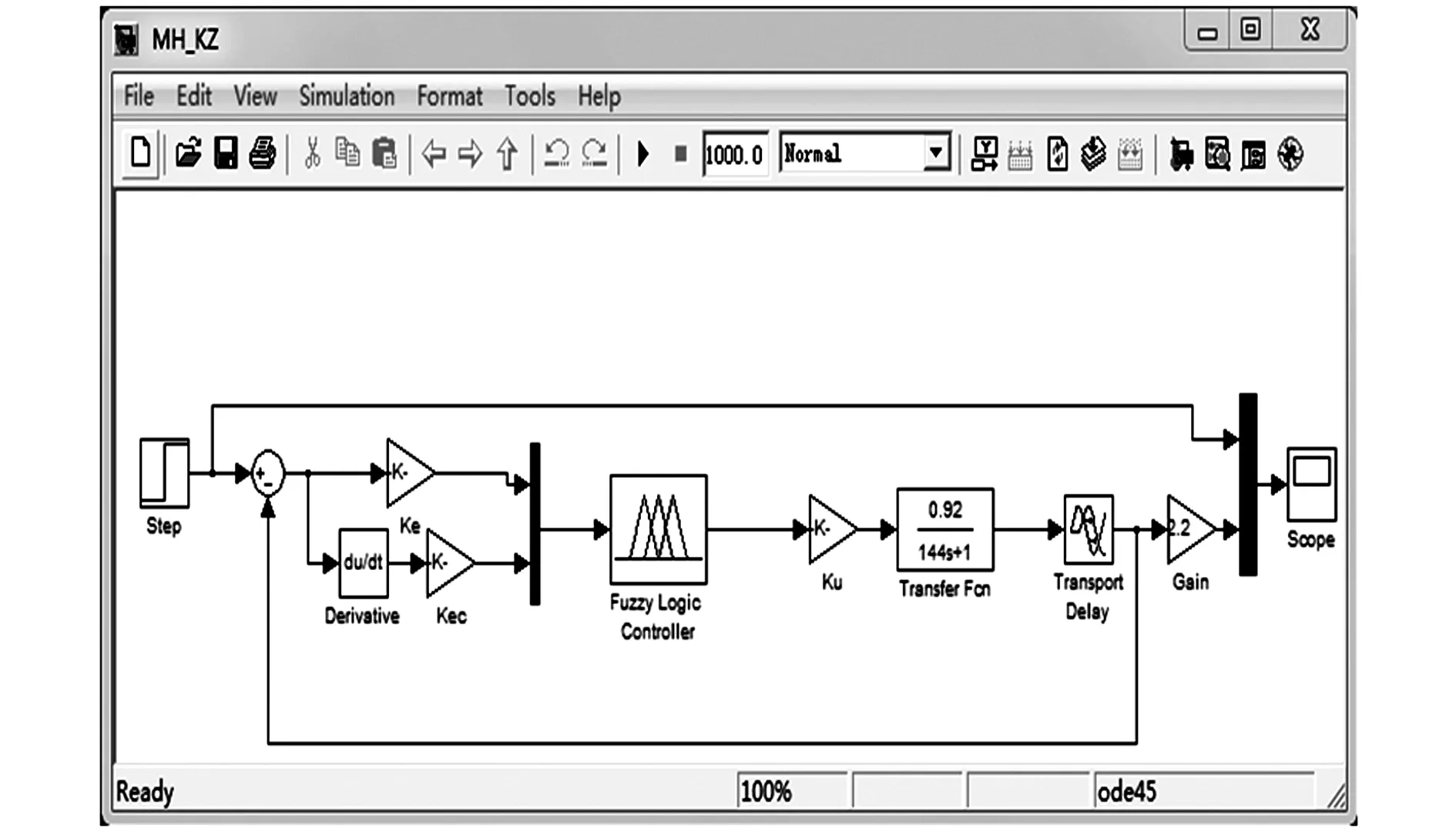
图1 系统仿真模型图

图2 阶跃响应曲线
由图2可知, 在超调量和抗干扰能力方面的性能指标都好于PID 控制器, 动态性能和稳态精度更好.
1.3 与传统PID控制系统的比较
PID控制是偏差比例(P)、偏差积分(I)、偏差微分(D)控制的简称.PID控制器传递函数的一般表达式为:
Gc(s)=Kp+Ki/s+Kds
(3)
Kp为比例放大系数;Ki为积分放大系数;Kd为微分放大系数.控制器的关键是确定三个放大系数值,在Simulink 中搭建PID系统控制模型如图3.PID仿真结果见图4.

图3 PID系统控制模型

图4 PID控制仿真
经过对PID控制和模糊控制两种方案的仿真研究和分析,从下表中明显看出:模糊控制和 PID控制相比,调节时间基本相等,但PID控制超调为2%,而模糊控制无超调.
2 结 语
通过使用Matlab/SIMULINK这个软件来搭建传统PID温度控制系统与自整定模糊PID温度控制系统的模型,并对它们进行仿真分析,从仿真结果可知模糊PID控制系统相比传统PID控制系统,控制速度要快,稳定性要高,更有应用价值.
[1] 汤红成,李著信,王正涛.一种模糊PID控制系统[J].电机与控制学报,2005,9(2):136-138.
[2] 吴为明,王仁丽.温度控制系统的发展概况[J].工业炉,2002,24(20)18-20.
[3] 耿 瑞.基于Matlab的自适应模糊PID控制系统计算机仿真[J].信息技术,2007(1):43-46.
[4] 邓 玮,张宝平.模糊温度控制器的设计与Matlab仿真[J].郑州轻工业学院学报,2009,24(2):50-52
[5] 宋立芳,张永利.杨 庄,等.基于预测的模糊自整定PID温度控制系统[J].科学技术与工程,2006,6(14):2142-2147.
[6] 陈孝趋.中药材干燥设备设计及其控制系统仿真[D].杭州:浙江工业大学,2005,15-16.
猜你喜欢
环球时报(2020-08-11)2020-08-11
意林·全彩Color(2019年8期)2019-09-23
机电工程技术(2018年10期)2018-12-06
天津教育·下(2018年9期)2018-07-13
自动化仪表(2017年8期)2017-08-30
小学生作文(低年级适用)(2017年4期)2017-07-07
学生天地(2017年10期)2017-05-17
唐山文学(2016年11期)2016-03-20
探测与控制学报(2012年1期)2012-08-27
Biophysics Reports(2011年2期)2011-10-11
