
基于MEMS器件的客船防倾覆应急气囊系统设计
2018-01-18 03:27马全党刘佳佳
自动化与仪表 2017年5期
马全党 ,刘佳佳 ,胡 义 ,刘 森 ,苏 昂
(1.武汉理工大学 航运学院,武汉430063;2.武汉理工大学 能源与动力工程学院,武汉430063)
目前,全球客船旅游市场快速发展,客船旅游市场占有量一直以8.6%左右的速度增长,客船数量也在不断增加。但由于近年来全球环境恶化,龙卷风、强对流天气等气象灾害频发且难以预测,内河客船倾覆事故频发[1-3],这逐渐引起人们对其运行安全问题的高度关注。因此针对内河客船瞬时倾覆问题,实现对客船的姿态预判断与应急防瞬时倾覆是十分必要的。现阶段如何减缓船舶倾覆速度,为应急救援争取更多的时间,成为了提高内河客船安全性、促进客船旅游业持续发展的主要问题。
1 防瞬时倾覆系统研究现状
国内外学者均开展了关于减缓船舶倾覆问题的研究[4-8],这些装置虽然具有防倾覆效果,但均根据经验判断来控制,且成型较慢,难以满足紧急情况下系统迅速生效的应急需求和复杂多变的水上环境,归纳研究方法,大致有以下几种,如表1所示。

表1 船舶防倾覆的方法及比较Tab.1 Method and comparison of ship capsizing
基于已有的研究,结合客船本身特性,本文设计了一种基于MEMS器件的内河客船应急气囊系统。首先基于MEMS技术的高性能三维姿态传感器可实时获取船舶漂浮姿态,经姿态解算,可获取船舶横倾角、角速度与角加速度,结合卡尔曼滤波算法和以姿态传感器测量值为输入值的预测系统,设计内河客船应急气囊系统;然后以横倾为例,分析船舶在外加载荷作用下,控制系统的响应时间,实验表明该系统预测结果准确,可为气囊释放提供数据支持。此外采用DFBI模型,对船体倾覆进行了数值模拟,实时监控船体受力,在运动稳定后得出船体的航行姿态及相应数据。仿真表明气囊具有显著的防瞬时倾覆的作用。
2 船舶姿态监测
2.1 船舶姿态预测模型
船舶在内河中的运动与船舶在海洋中的运动大有不同,内河中受突风吹袭产生的波浪较小,经统计侧翻等致命事故主要由横摇导致,故本文建立横摇预测模型,其传递函数为

式中:Y(s)、X(s)分别为输入象函数与输出象函数。
船舶受突风作用产生横摇,由船舶原理[9]可知,该作用的惯性矩、回复矩以及阻尼矩的合成与船舶所受总力矩—扰动力矩相等,其表达式为

式中:MG、MH、MZ分别为船舶的惯性矩、回复矩以及阻尼矩;MBG、MBH、MBZ分别为由于波浪影响而产生的惯性扰动力矩、回复扰动力矩以及阻尼扰动力矩。求解式(2),可得到船舶横摇的传递模型为

式中:θ(s)、αθ(s)分别为输入倾角与横摇倾角;ωθ、ξθ分别为无阻尼自振角频率与阻尼比。
为了预测算法的研究,将式(3)转化为空间状态模型:

预测算法为卡尔曼滤波算法[10],该递推算法适用于线性、离散和有限维系统,并以动力学方程为基础,该方法已有相关的学者进行研究,本文不再赘述,通过卡尔曼滤波算法预测出船舶的运动信息,为气囊的释放提供数据支持。
2.2 姿态传感器工作原理与安装
在本文描述中,主要由主控制芯片、三轴陀螺仪和倾角传感器构成姿态传感器。其工作原理主要为主控制芯片首先采集三轴陀螺仪和倾角传感器的原始数据[11],而其具体的姿态角度信息将由2个传感器的数据综合分析得出。根据实际应用要求,尽可能采取2种传感器的优点,以载体的运动速度为判别依据,来更好地实现数据融合。当测量系统单独运行时,为了给预测模型数据提供一定的数据支撑,系统将通过采集传感器的数据直接进行误差补偿来输出姿态角度。姿态传感器工作原理如图1所示。

图1 姿态传感器工作原理Fig.1 Principle of attitude sensor
本文采用在船舶的艏、舯、艉3个区域的中线面上分别安装1个姿态传感器的方案。多个传感器协同工作可有效防止安装位置松动、船体碰撞、挤压后骨材或板材变形导致安装部位扭曲、货物或人员碰触等情况下,船舶未发生横倾而某个传感器捕捉横倾角度,误测船舶发生横倾等情况。利用实船进行试验获得输出的信号时差最大时传感器的间距,进行传感器的布设。
3 系统整体设计
本文研究并设计了一种基于MEMS的内河客船应急气囊系统。该系统是由船舶姿态预判断模块、信号处理模块、应急控制模块三大部分组成。其中船舶姿态预判断模块由姿态传感器、数据采集卡组成,信号处理模块使用微型处理器,应急控制控制模块主要由气体发生器以及气囊组成。系统总体设计如图2所示。
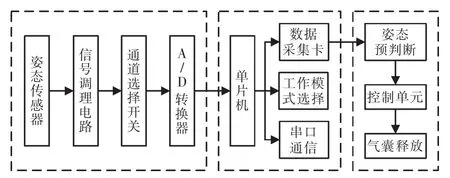
图2 系统总体结构Fig.2 Structure of overall system
姿态传感器选用基于MEMS技术的高性能三维运动姿态测量系统的GY9250-MPU9250型,通过内嵌的低功耗ARM处理器输出校准过的角速度、加速度及磁数据等运动姿态数据,将信息存储于LMSSCADAS III数据采集端,为船舶姿态预判断做好准备。该数据采集端具有16通道,每通道最高采集频率为 204.8 kHz,量程 PQA:(±62.5 mV~±10 V)、PQMA:(±10 mV~±25 V)、PQCA:(±5 pc~±51200 pc),采样带宽:(16位∑Δ、92 kHz)。数据采集前端与微型处理器连接,微型处理器实时对信号进行分析处理,若船体出现横倾趋势,应急模块触发气体发生器,气囊释放。
3.1 气囊设计与布置
在船体外壳设计专门的凹槽放置固定气体发生器,凹槽设计为喇叭状开口。气囊分为主体部分和连接部分。平时,连接部分反折、主体部分环形折叠,存放于凹槽并加以饰盖,充气后可冲破饰盖;成型后,连接部分与凹槽内壁完全贴合,减小应力;主体部分近似圆柱体,为船体提供恢复力矩。
本文所研究的基础是将气囊安装在主甲板层,气囊安装位置设计在重心以上高度;气囊结构类比蜂窝的六边形,结合汽车安全气囊的设计[12],船用气囊的结构采用多气室设计。
3.2 应急处理系统原理
本系统利用STM32单片机,基于MEMS的姿态传感器,实时获取船舶运动姿态,根据基于姿态解算的气囊释放预判断算法来编写程序。当船舶出现横倾且横倾角度达到进水角时,并预测船舶具有继续倾覆横倾的运动,自动触发点火装置,主甲板气囊在0.5~2 s释放。控制方法流程如图3所示。
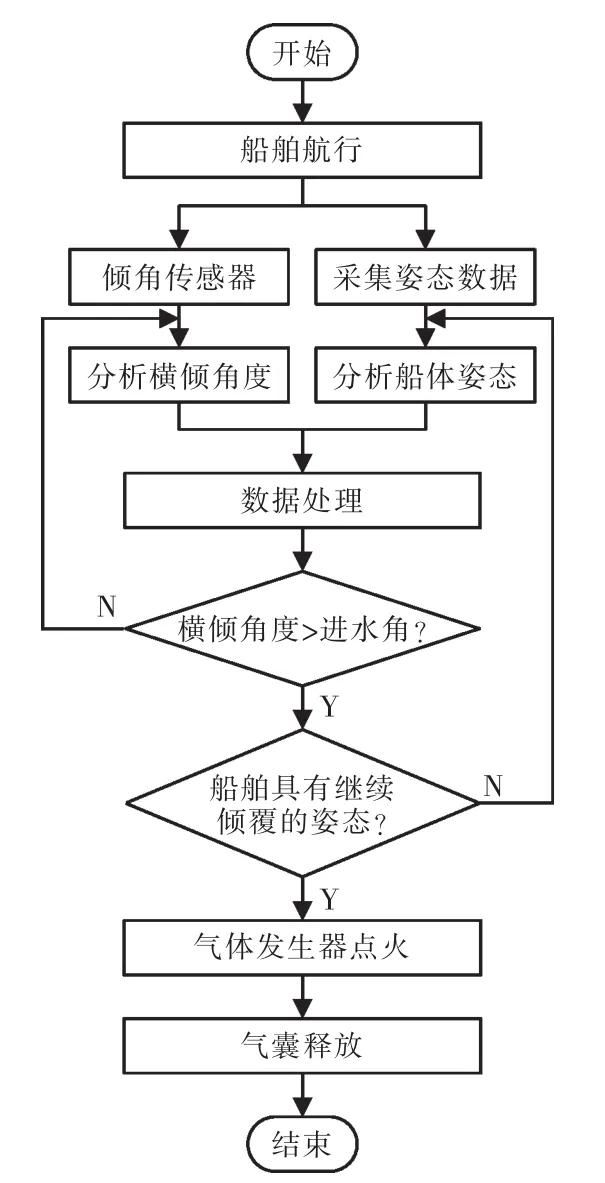
图3 系统控制流程Fig.3 Flow chart of system working principle
3.3 系统试验
为进一步论证研究成果,需对试验船舶进行试验。因直接在实船上进行试验危险系数较大且成本高昂,纯模拟又不能为研究成果提供确切的论证,所以采用半物理仿真方法进行试验,其不仅能够有效降低试验成本,还可以显著缩短设备的研发周期,仿真采用的船体基本信息如表2所示。该方法利用计算机对船舶的横摇状态进行模拟,用于测量参数的一系列传感器、芯片等设备采用实体,有效保证了试验数据的准确性。
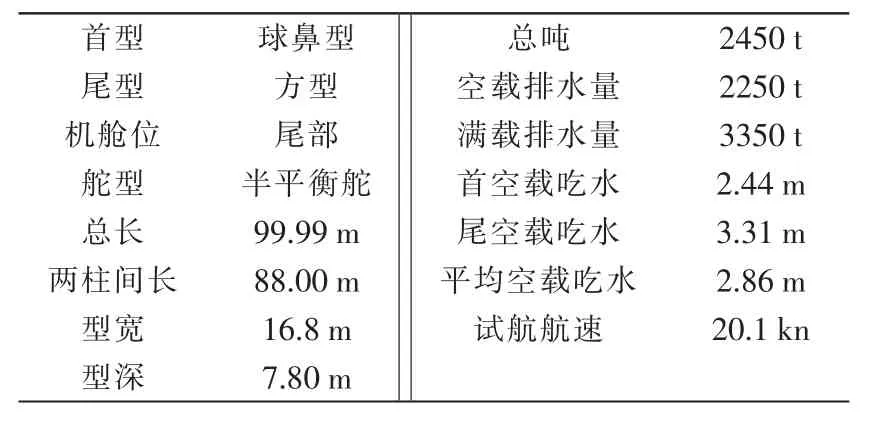
表2 试验船舶参数Tab.2 Experimental ship parameter
船舶横摇预测系统预测的横摇角度误差的均值仅为0.2065 rad,当船舶横倾至进水角时,且船舶具有继续运动的加速度,主甲板层气囊瞬间释放。
角速度误差的均值仅为0.0226%,可见该预测系统预测结果准确,可为气囊释放控制提供有效的数据支持。
3.4 气囊效果仿真
运用STARCCM+软件,采用重叠网格方法,建立各重叠网格间的耦合关系,为各区域流场计算提供边界信息的传递服务;采用DFBI模型,对船体倾覆进行了数值模拟,将船舶缩小25倍,在6.5~20 s时间段内,通过对船体施加60 N·m的力矩,模拟客船运动。对模型1(未安装气囊)、模型2(安装气囊)进行数值模拟,实时监控船体受力,在运动稳定后得出船体的航行姿态及相应数据。提取2种工况下船舶运动的位移、力矩以及转角等相关参数。
经过对比分析船舶重心相对于水平面的位移(图 4),在外加约束作用 5.3 s后(即 11.46 s),无气囊的模型位移瞬间增大,船舶开始下沉,故气囊的合理布设可提高船舶抗沉性。
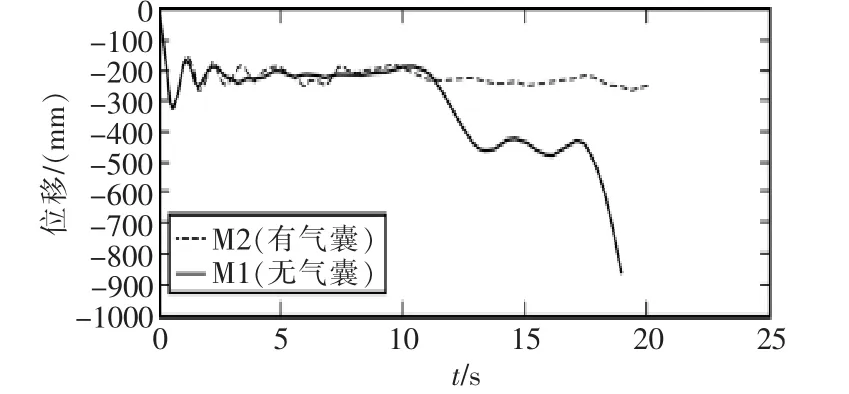
图4 位移对比Fig.4 Comparison diagram of displacement
经过对比分析船舶倾斜角度(图5),在即将倾覆时,模型1在气囊所提供的恢复力矩的作用下倾角未超过进水角。模型2在外加约束作用5.3 s后,达到并超过进水角,船舶稳性丧失,发生倾覆。故气囊的合理布设可提高船舶稳定性。

图5 转角对比Fig.5 Comparison diagram of dip angle
4 结语
本文利用自动控制技术较好地解决了船舶瞬时倾覆的问题,基于MEMS的内河客船应急气囊系统,不仅能提高船舶的抗翻沉能力,还对船舶的安全性提出了新的提高途径;系统对提高客船的安全性能、保障人员的生命安全以及促进客轮旅游业的发展具有较大的推广价值与应用前景。为了将本应急处理系统更好地运用在船舶上,今后还应在提高姿态预判断精确度与处理系统的稳定性2个方面深入地开展试验研究工作。
[1]王新胜,刘大刚.客滚船“辽旅渡7”沉没事故案例分析[J].航海技术,2006(6):2-5.
[2]“东方之星”号客轮翻沉事件调查报告公布[J].消防界:电子版,2016(1):43-46.
[3]四川广元白龙湖库区“6·4”游船翻船事故应急处置工作情况[J].中国应急管理,2016(6):65-66.
[4]Thompson JT.Designing against capsize in Beam Seas:recent advances and new insights.ASME.Appl.Mech.Rev.1997,50(5):307-325.
[5]宋志鹏,戴武会,边疆,等.气胀式附加浮体抑制自卸砂船翻沉的应用[J].船海工程,2015,44(1):78-82.
[6]曹林冲,李孟玲,陈双.船舶抗沉气囊装置专利[P].中国实用新型专利:CN202642053U,2013-01-02.
[7]杨庆勇.船舶自动应急抗沉减摇防倾覆装置[D].大连:大连海事大学,2000.
[8]张奥,李嘉宸,赵良林,等.一种船舶缓沉装置专利[P].中国实用新型专利,CN203714161U,2014-07-16.
[9]贺沅平,危卫,顾兆林.龙卷风风场下水面船舶倾覆的力学机理研究[J].西安交通大学学报,2016,50(5):120-124.
[10]余倩,邓星桥.一种基于实时预测算法的船舶姿态控制器设计[J].舰船科学技术,2016,38(9):49-51.
[11]金鸿章,王帆,綦志刚.小型便携式船舶姿态测量系统研究[J].仪器仪表学报,2008,29(7):1548-1553.
[12]钟志华,杨济匡.汽车安全气囊技术及其应用[J].中国机械工程,2000,11(2):234-237.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
北京航空航天大学学报(2022年5期)2022-06-06
船舶标准化工程师(2019年4期)2019-07-24
东坡赤壁诗词(2019年3期)2019-07-05
中国汽车界(2016年1期)2016-07-18
船舶标准化工程师(2015年5期)2015-12-03
学苑创造·C版(2015年9期)2015-11-26
中国记者(2015年8期)2015-05-09
中国舰船研究(2014年6期)2014-05-14
