基于Matlab的CCD激光损伤仿真设计
2018-01-17 00:52程高峰王顺李强杨建昌闫宗群
长春理工大学学报(自然科学版) 2017年6期
程高峰,王顺,李强,杨建昌,闫宗群
(陆军装甲兵学院 控制工程系,北京 100072)
电荷藕合器件(CCD)因其具有电路简单和体积小等优点,被广泛应用于军用和民用的探测、摄象等领域。在现代战争的光电对抗领域中常需要研究强激光对某CCD器件造成损伤时激光器参数和激光作用距离对激光损伤的影响。Matlab是一款可用于算法开发、数据分析、数值计算以及数据可视化的优秀仿真软件。它以强大的数值计算和图形显示功能,可开放式,简单易用等特点,被广泛应用于众多科技领域中。本文借助Matlab仿真软件强大的数值计算和图形显示功能建立了一个具体良好人机交互功能的CCD激光损伤仿真平台。
本文以一个特定的CCD激光损伤仿真模型为基本结构,采用Matlab仿真软件对传输到CCD处基模高斯光束的三维光强分布、CCD位置处光斑二维光强分布以及不同位置处的激光中高于CCD损伤阈值的能量所占比曲线图进行了仿真。在Matlab GUI中,可以通过灵活设置激光器结构参数以及激光作用距离来对比分析不同的CCD激光损伤仿真结果,以此来促进了光电对抗中对激光损伤仿真以及毁伤评估的研究。
1 理论模型
1.1 基模高斯光束
沿着z轴方向进行传播的基模高斯光束可以通过任何结构的稳定腔生成(如图1),并且其空间任意位置光场强度E00(x,y,z)均可由如下的一般形式表示[1]:

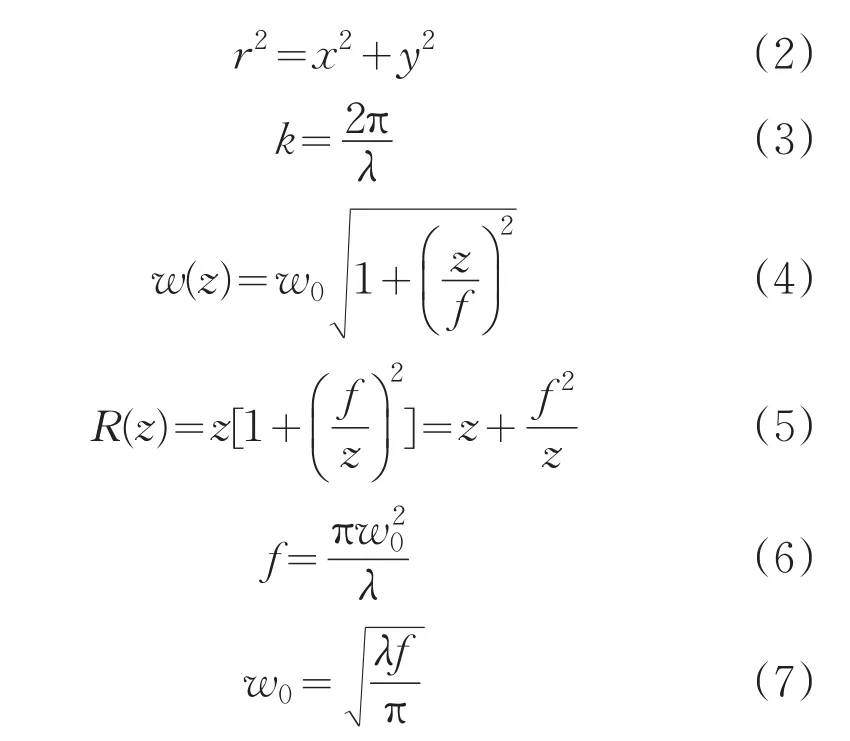
式中,λ是激光波长;k是波数;a表示常数因子;w0是基模高斯光束的束腰半径;R(z)表示与传播轴z轴相交于z点的基模高斯光束等相位面的曲率半径;w(z)表示与传播轴z轴相交于z点的基模高斯光束等相位面上的激光光斑半径;f表示基模高斯光束的共焦参数。在式(1)中,参数w0(或f)可以描述基模高斯光束的具体波形,这就能够深入研究基模高斯光束本身的特性以及传播规律,而不管它是由何种稳定腔所产生的。
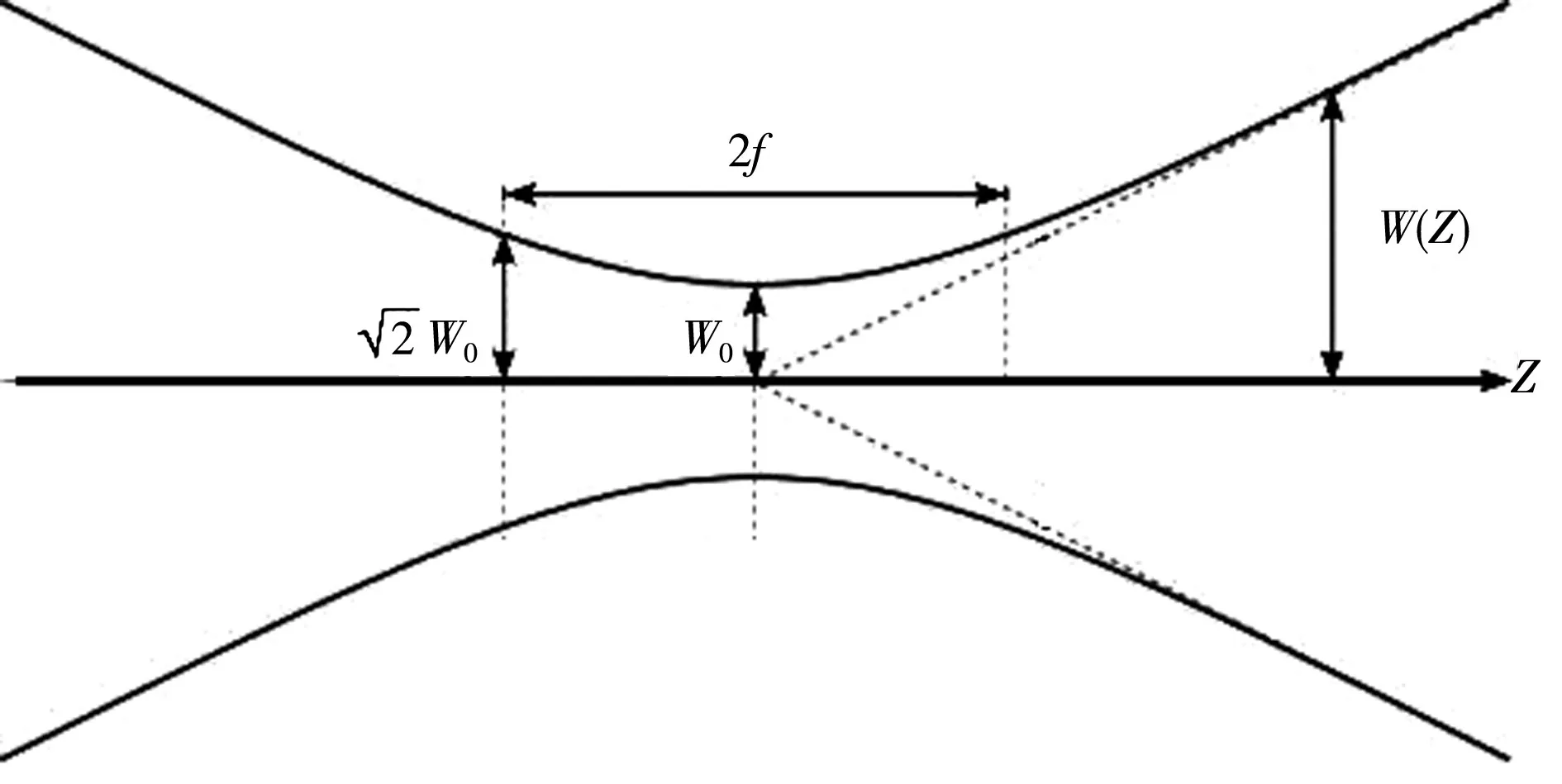
图1 基模高斯光束图
对于通过一般稳定球面腔(如图2)所产生的基模高斯光束,其参数f以及w0与R1、R2、L的关系为[1]:
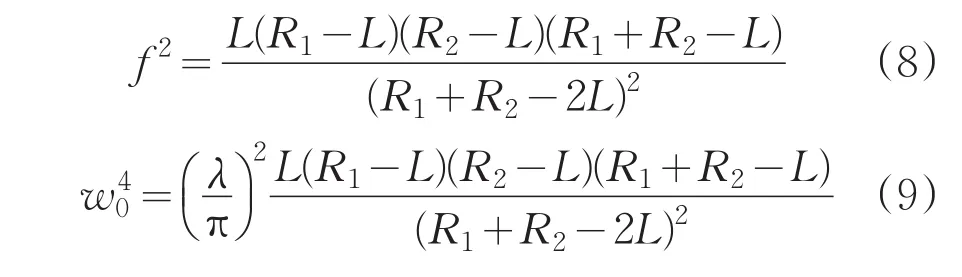
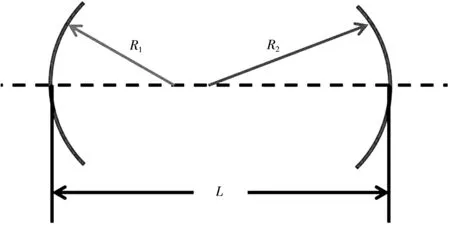
图2 激光谐振腔结构图
1.2 大气衰减效应对激光光强的影响
大气衰减效应是指由于大气组分(各种气和分子溶胶)对光波的散射和吸收作用而造成辐射能量衰减的现象。大气衰减效应的存在导致了激光在大气中传输时激光福射强度的衰减。根据布格尔—朗伯特定律,激光大气衰减系数μ与光强之间的关系为[2]:

式中,L为激光的传输距离,μ是激光大气衰减系数,I0为激光初始光强。由于空气分子大小相对于激光波长来说微小程度可以忽略不计,所以可以采用瑞利散射理论解释大气对激光的散射影响。然而由于其计算量巨大,在科研生产中人们对其做了简化,主要根据如下经验关系式:

式中,λ为激光波长;Rv为大气能见度(km);q为修正因子,根据能见度Rv的不同而采取不同的值,能见度小于6km时,,一般情况下,q=1.3,在能见度特别好时,q=1.6。
1.3 激光损伤阈值光强
在光学实验和应用中,在选择光学元件时,光学元件是否能够承受光辐射作用是一项很重要的参考因素,这一点在高功率激光的应用中尤为重要。光辐射损伤光学元件主要包括三种形式:一是光吸收导致的热效应;二是短脉冲激光辐射形成的介质击穿;三是超短脉冲激光下,极高峰值功率辐射直接导致的物质化学键破坏。激光损伤阈值是衡量一个光学元件承受激光辐能力的参数,代表光学元件能够承受的最大光功率密度(连续光源W/cm2)或最大能量密度(脉冲光源J/cm2)[3-9]。
根据研究[3],用连续波YAG激光器照射CCD器件时,CCD能量阈值光强为4.5×10-5W/cm2。本文对CCD进行激光损伤的仿真时采用4.5×10-5W/cm2作为CCD的激光损伤阈值。
2 仿真模型
此CCD激光损伤仿真系统根据图3的基本结构进行仿真。此系统结构由激光谐振腔和CCD器件两部分组成,分别执行生成特定激光光束以及激光损伤的仿真。其中激光谐振腔两个反射镜M1,M2的曲率半径分别为R1、R2,激光谐振腔的腔长为L1,CCD距反射镜M2的距离为L2。由激光谐振腔的结构参数R1、R2、L1,采用束腰半径计算公式(8)能够计算出谐振腔出射激光的束腰半径大小,然后根据束腰半径w0这一重要参数进行接下来的高斯光束损伤的仿真。
当谐振腔的三个结构参数R1、R2、L1满足稳定性条件时,与其等价的共焦谐振腔就可以唯一的确定下来。等价共焦谐振腔的位置的确定采用如下公式:
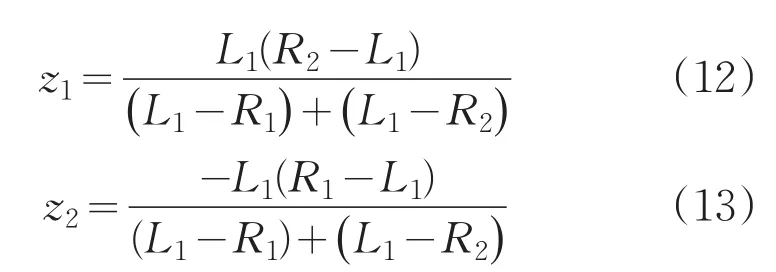
其中,z1,z2分别为反射镜M1,M2与等价共焦谐振腔中心的距离,也就是与生成的激光光束束腰之间的距离(距离为负时,在束腰左侧,距离为正时,在束腰右侧),然后根据稳定谐振腔反射镜M2与CCD之间的距离为L2就可以计算出基模高斯光束作用于CCD时CCD与稳定谐振腔生成的基模高斯光束束腰之间的距离z3。
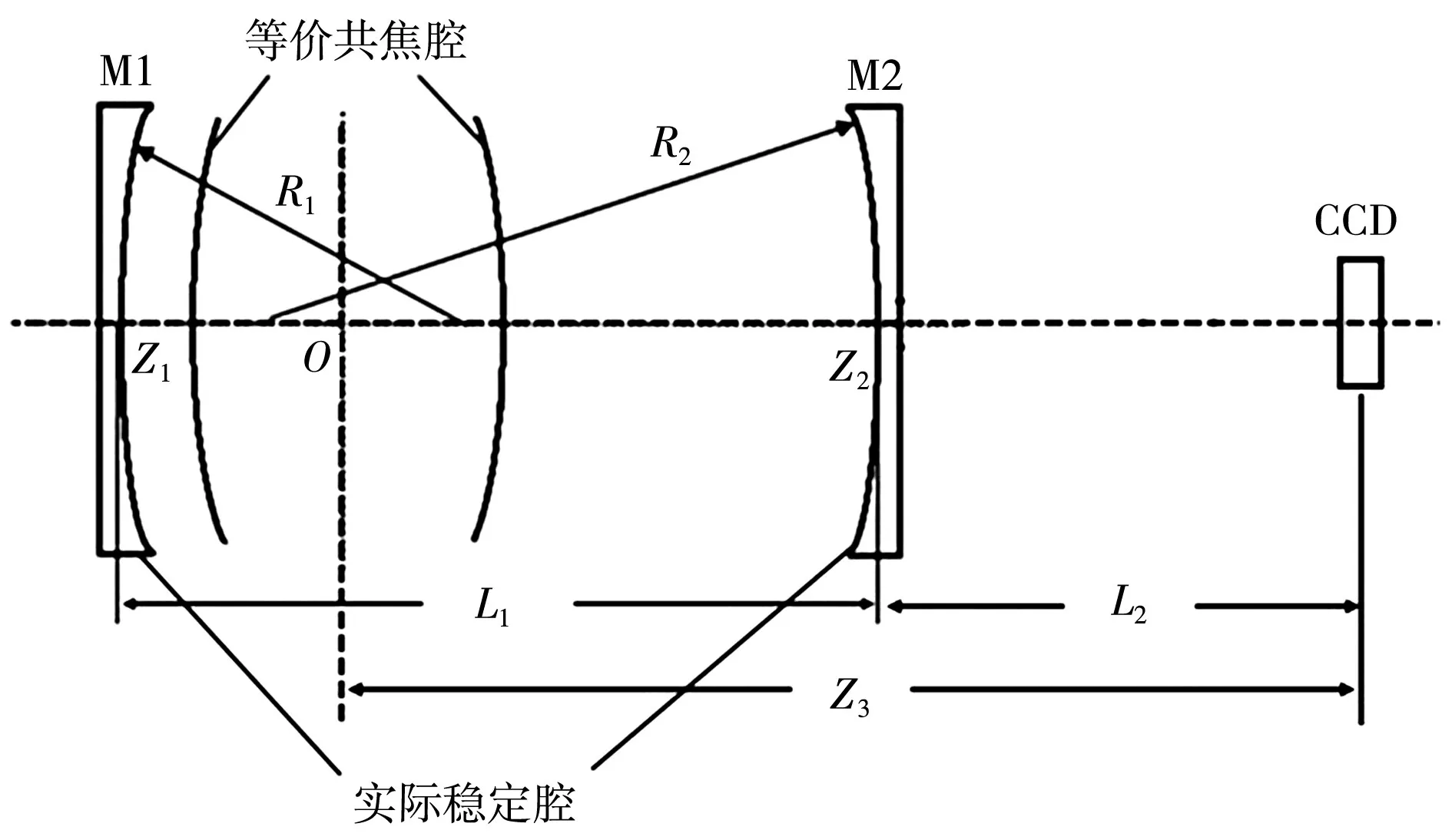
图3 激光损伤仿真结构模型
3 仿真算法流程
3.1 仿真主要步骤
本文设计的CCD激光损伤仿真平台的主要功能为对传输到CCD处高斯光束的三维光强分布、光斑二维光强分布以及激光光斑中高于CCD损伤阈值的能量所占比曲线图进行仿真。用MATLAB GUI设计的CCD激光损伤仿真平台设计的主要步骤为:
合理设计GUI用户界面上各控件的布局分布。界面上的控件主要包括涉及激光损伤仿真的各个实验参数、用户界面上显示的激光损伤仿真结构模型图以及各个激光损伤仿真结果触发按钮。
合理设置各个控件大小、颜色、位置、文字等属性。
设计编写激光损伤仿真初始界面函数(OpeningFcn)和各个触发按钮控件的回调函数(Callback)代码。
3.2 回调函数编程方法与流程
回调函数代码是整个仿真设计中的关键,是对界面控件触发时的事件响应函数。各触发按钮的回调函数编程方法如下:
在初始激光功率为P的情况下,采用光强来进行高斯光束CCD位置处的三维光强分布仿真[1]。仿真中,在CCD的z3位置处xy平面内与光轴轴线相距r处的采样点的光强值为这样在GUI中,通过surf(x,y,I)函数,就可以进行在CCD位置处的三维光强分布仿真。在三维光强分布的基础上,画出光强等于CCD阈值光强Im的阈值平面,通过这个阈值平面,就可以看出三维光强中大于CCD阈值光强的范围。CCD位置处的三维光强分布仿真流程如图4所示。
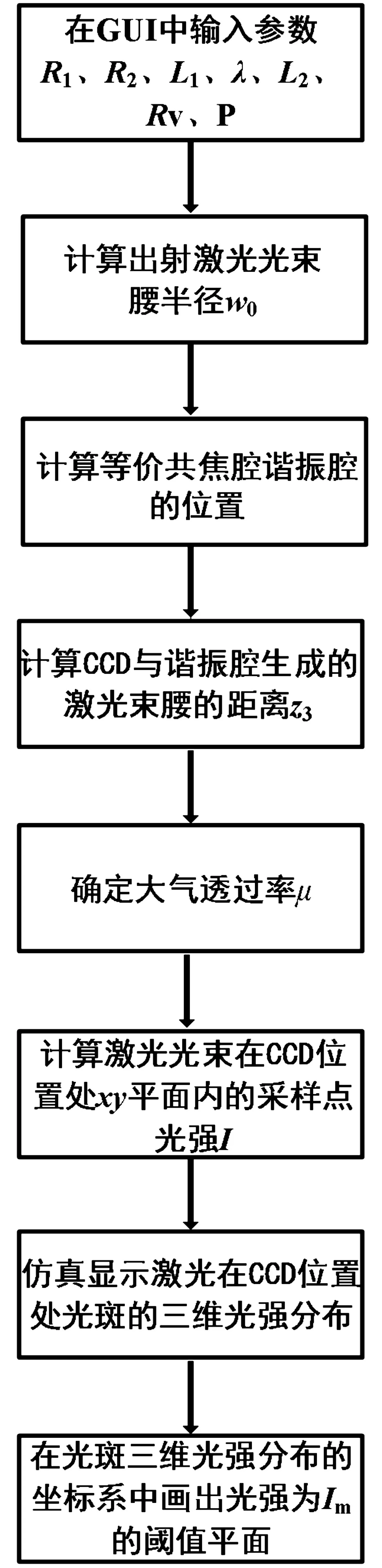
图4 CCD位置处的三维光强分布仿真流程图
在稳定谐振腔出射的激光功率为P的情况下,采用光强计算公式来进行基模高斯光束CCD位置处的二维光斑光强分布仿真。仿真中,在CCD的z3位置处的xy平面内与光轴轴线相距r处的采样点的光强值为I=然后在GUI中,用imagesc函数就可以进行CCD位置处xy平面的激光光斑光强分布的仿真。在仿真出的光斑二维光强分布的基础上,根据计算公式R=,计算出激光传播轴z轴z3位置处xy平面内光强大于阈值光强Im的区域半径R。通过这个半径,就可以仿真出光斑中大于阈值光强Im的光强分布范围。CCD位置处高斯光束光斑二维光强仿真流程如图5所示。
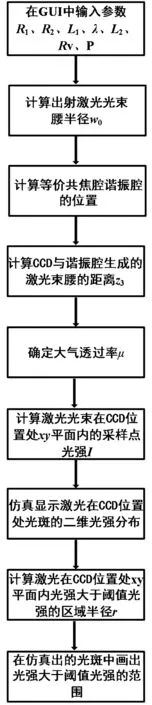
图5 CCD位置处基模高斯光束光斑二维光强分布仿真流程
沿激光光束传播轴z轴不同位置处高于阈值的能量占此位置处总能量的百分比曲线的仿真方法为:首先根据上一步计算出的激光在光束传播轴z轴z位置处xy平面内光强大于阈值光强Im的区域半径R=以及积分公式求出沿光束传播轴z位置处高于CCD损伤阈值的功率P1,接着求出沿光束传播轴z位置处高于CCD损伤阈值的能量占此位置处总能量的百分比,这样在Matlab中就可以用plot(z,M)函数仿真出沿光束传播轴z轴不同位置处高于阈值的能量占此位置处总能量的百分比曲线。沿光束传播轴不同位置处的高于CCD损伤阈值的能量占此位置处总能量的百分比仿真流程如图6所示。
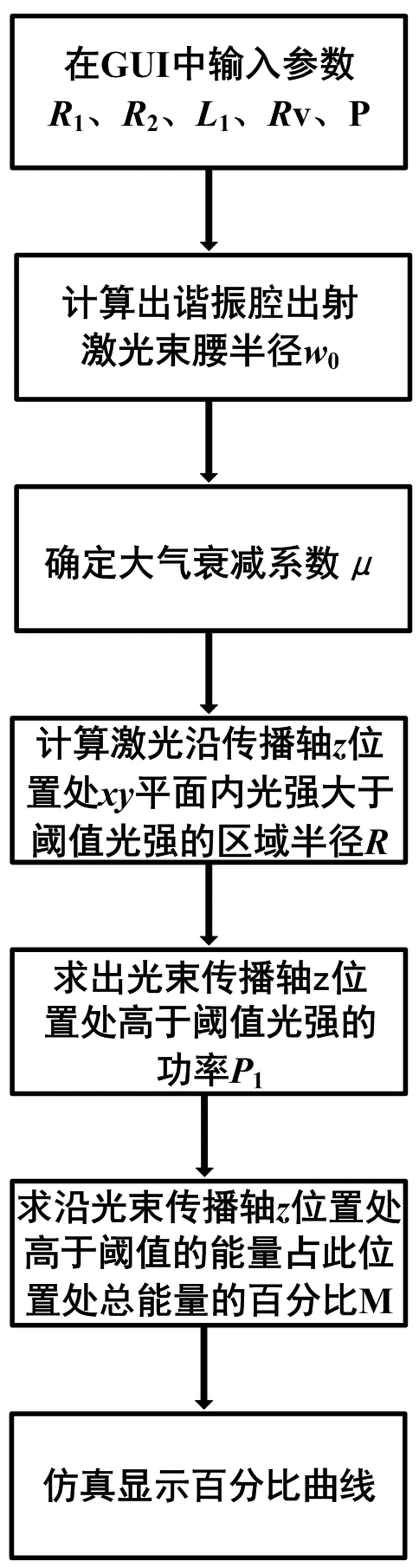
图6 沿光束传播轴不同位置处高于阈值的能量占总能量的百分比
4 仿真结果
在Matlab GUI图形用户界面中输入各参数,R1=2000mm,R2=2000mm,L1=300mm,L2=3.5km,激光谐振腔出射激光波长λ=1060nm,激光功率P=400W,L2=3.5km,空气能见度为10km,此条件下CCD激光损伤的仿真结果如下:
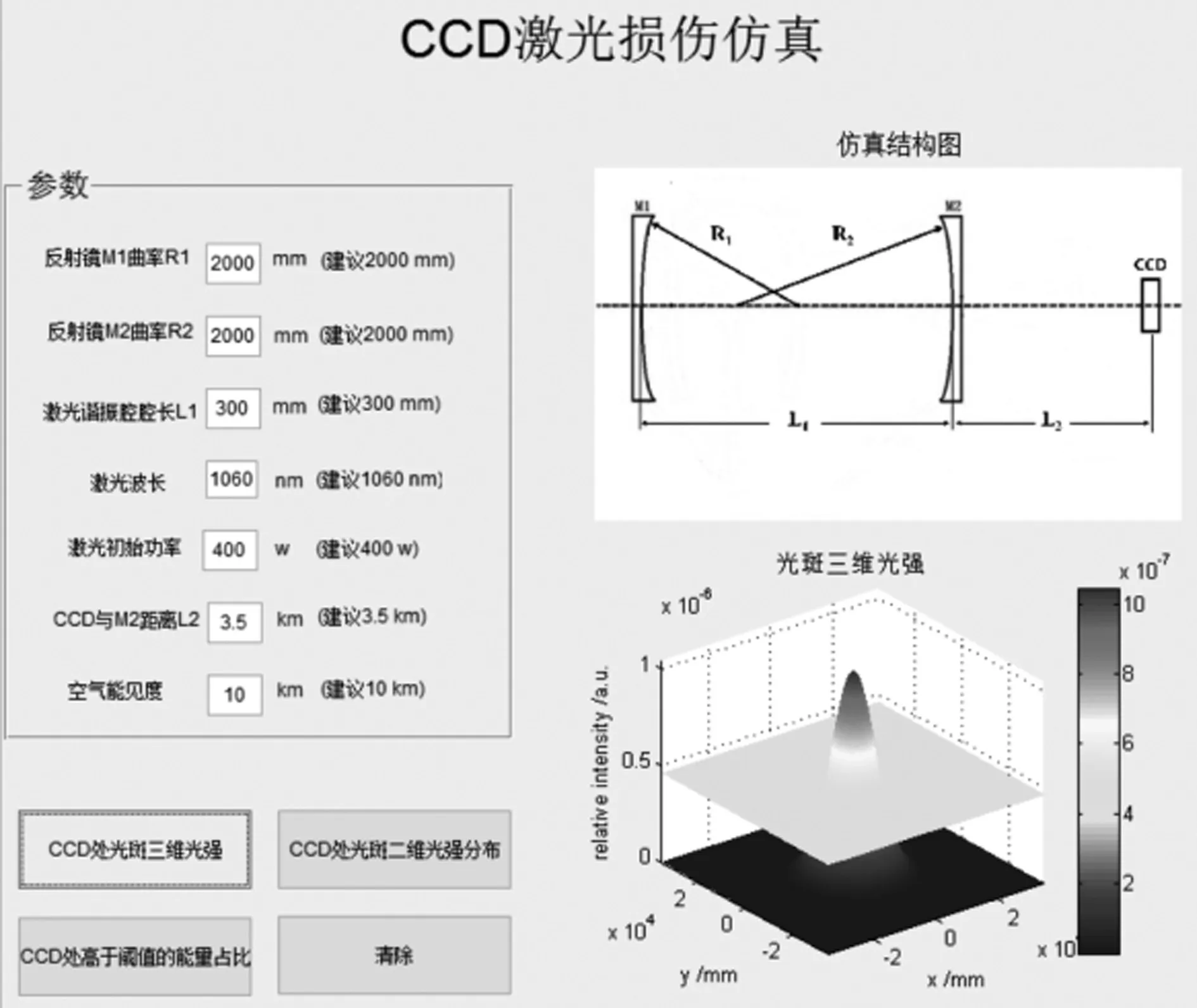
图7 CCD处激光三维光强分布
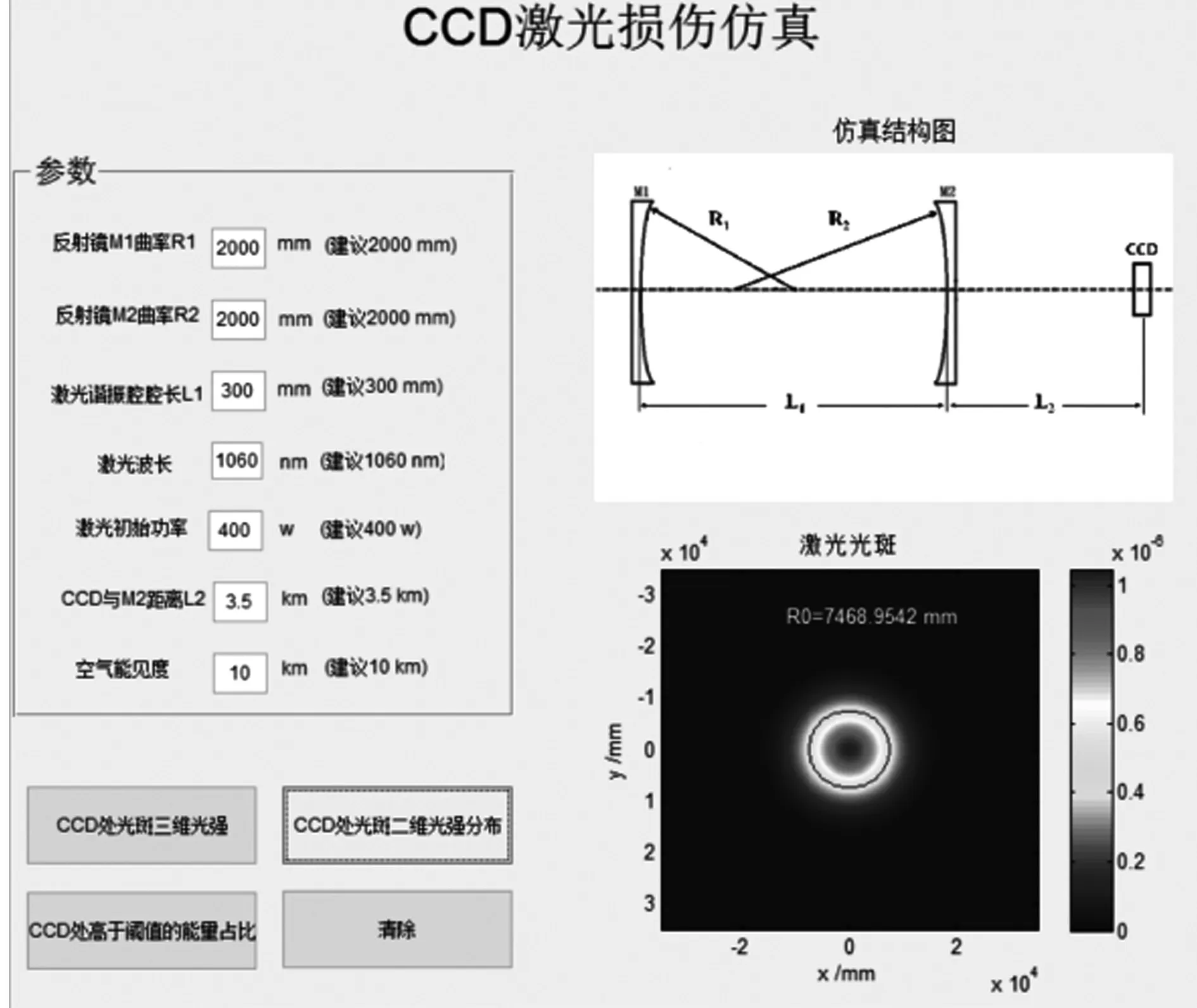
图8 CCD处激光光斑二维光强分布
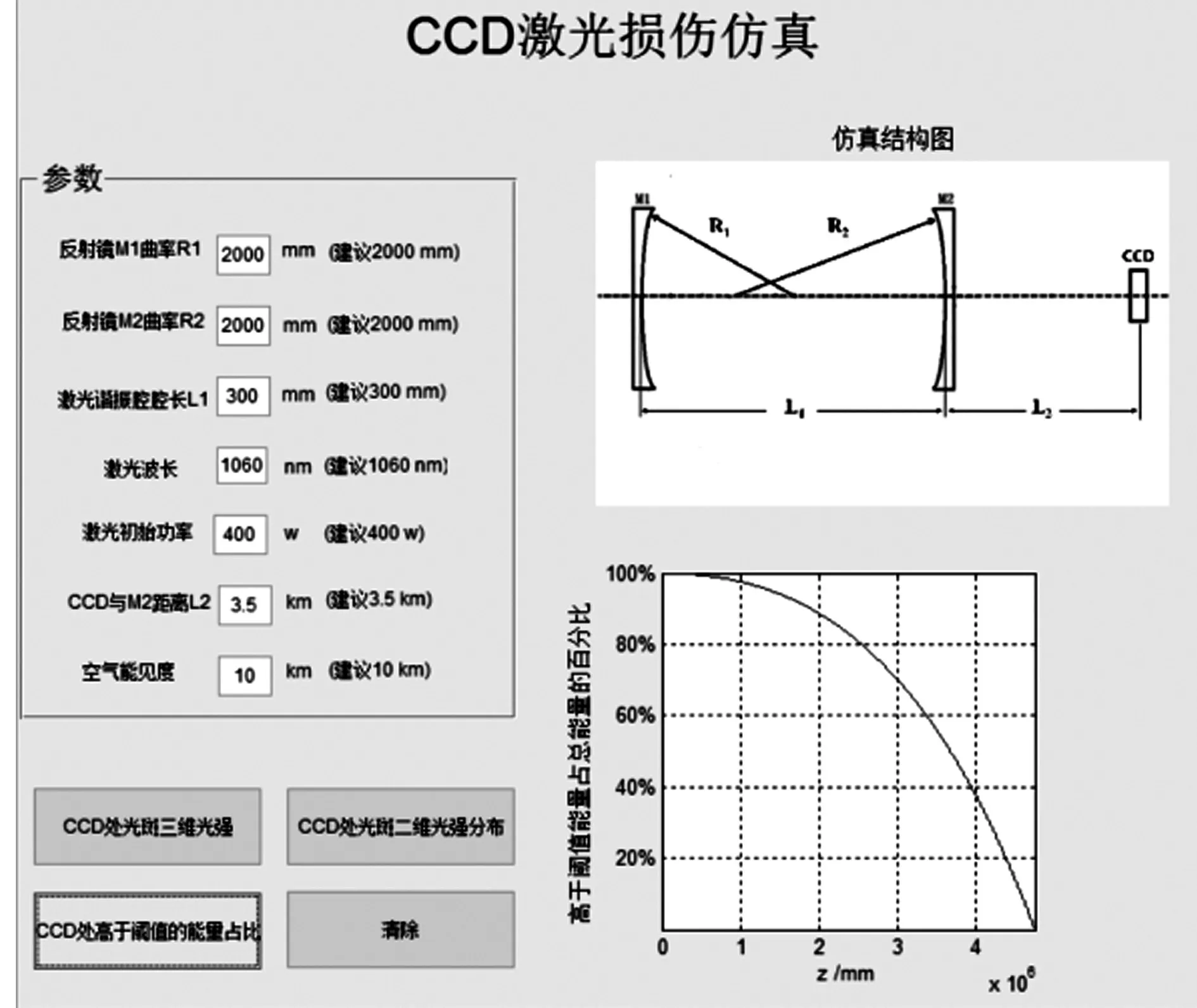
图9 不同位置处的激光中高于CCD损伤阈值的能量占总能量的百分比
图7、图8、图9分别是CCD处高斯光束三维光强分布、CCD位置处光斑二维光强分布以及不同位置处的光斑中高于CCD损伤阈值的能量所占比仿真结果的GUI界面图。在三维光强分布图中,CCD激光损伤阈值平面的出现使仿真更加直观,明确地指出了能够损伤CCD的能量范围。在高斯光束的光斑二维光强分布仿真中,显示出了此仿真条件下大于CCD激光损伤阈值光强的光斑区域半径为7468.9542mm,也就是说指出了能够损伤CCD的范围。在图9中,此仿真平台计算出了不同位置处的激光中高于CCD损伤阈值的能量所占比,形象的展现了此条件下激光损伤能力随着激光传输距离变大而减小。从仿真结果可以看出在Matlab GUI中输入参数后,CCD仿真平台成功地对CCD处高斯光束三维光强分布、CCD位置处光斑二维光强分布以及不同位置处光斑中高于CCD损伤阈值的能量所占比进行了仿真,仿真结果符合理论计算值。
5 结论
本文利用Matlab仿真软件成功的对CCD处高斯光束三维光强分布、CCD位置处光斑二维光强分布以及不同位置处光斑中高于CCD损伤阈值的能量所占比进行了仿真。通过在Matlab GUI用户交互界面中修改变动激光器关键参数以及出射激光辐射作用距离,得到了不同条件下的仿真结果,动态形象直观地展现了CCD激光损伤于各参数物理量之间的关系,为光电对抗中的激光损伤仿真与毁伤评估的提供了新的研究手段。
[1]周炳琨.激光原理[M].北京:国防工业出版社,2000.
[2]王英俭,范承玉,魏合理.激光在大气和海水中传输及应用[M].北京:国防工业出版社,2015.
[3]王世勇.激光对CCD探测器干扰损伤的研究及模糊评估[D].长春:长春光学精密机械与物理研究所,2002.
[4]孙华燕,张廷华,韩意.军事激光技术[M].北京:国防工业出版社,2011.
[5]张卫山,尚剑锋,刘雪林,等.基于MATLAB GUI的波动光学仿真平台[J].大学物理实验,2013,26(03):85-87.
[6]邓昌瑞.基于MATLAB GUI的多功能计算系统设计及实现[D].南昌:南昌大学,2012.
[7]曲伟娟.基于Matlab的光学实验仿真[D].西北工业大学,西安:2004.
[8]蔡德芳,史晓华,文建国,等.CCD探测器的饱和阈值的光谱特性研究[J].激光杂志,2000,21(3):14-15.
[9]江继军,罗福,陈建国.CCD在fs激光辐照下的损伤研究[J].强激光与粒子束,2005,17(4):515-517.
猜你喜欢
物理学报(2022年23期)2022-12-14
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
采写编(2017年2期)2017-06-29
数学学习与研究(2016年18期)2017-01-07
现代远程教育研究(2015年2期)2016-01-15
长春理工大学学报(自然科学版)(2015年6期)2015-10-12
中国医疗美容(2015年1期)2015-07-12
管理科学(2015年5期)2015-06-27