基于莫尔条纹误差信号的多编码器故障诊断遥测系统
2018-01-17 00:51高旭邱伟何峰谢春雨
长春理工大学学报(自然科学版) 2017年6期
高旭,邱伟,何峰,谢春雨
(1.长春理工大学 光电工程学院,长春 130022;2.上海航天控制技术研究所,上海 201109;3.中国石油西南油气田公司安全环保与技术监督研究院,成都 610041)
光电轴角编码器是以光栅莫尔条纹为信息转换载体,集光、机、电为一体的角位移精密测量传感器。航空航天技术的发展,对绝对式光电轴角编码器的环境适应性要求越来越高,国内外科研人员不断尝试将其应用在恶劣条件下,测试环境适应能力,来致力于研究高可靠性的智能编码器。而目前当编码器测量精度出现问题时,大多数工程人员采用示波器、灯排显示等方式观测信号形态对光电信号处理电路中的器件进行调节,耗费大量人力、物力,且操作复杂。尤其在石油地下探测系统、经纬仪通信等系统中,由于光源扩散角非常小,通信距离远,仅靠姿态参数难以直接建立连接,因此需要高精度、无线传输的控制系统,通过捕获、瞄准、跟踪信息来实现通信链路的建立与保持。而光电编码器作为伺服系统的反馈测量元件,其精度决定了整个终端的指向精度,同时其工作状态、故障诊断的手段也成为了通信系统正常运转以及工作站在故障情况下可快速自动恢复的关键硬件基础。
尤其当机器人系统/伺服系统应用多个光电编码器的情况下,需要建立描述各个传感器输出信号之间交叉关系和冗余关系的事实,应用一定的故障检测逻辑系统,抽取测量同一系统中不同编码器单元信号物理量参数模型及关系,用以实现编码器故障检测和信号恢复。鉴于当前多编码器智能诊断无法实现的局限性,设计多编码器故障诊断遥测系统,根据误差信号、误码信息遥测编码器单元并对其进行补偿控制,对保证编码器在恶劣条件下的测量精度、节省人力、物力以及方便工程技术人员对传感器故障的快速调节与诊断具有重要意义和实用价值[1-3]。
针对高精度编码器光电信号质量偏差的补偿,提出莫尔条纹光电信号稳定性偏差、等幅性偏差、正交性偏差、正弦性偏差等自动补偿算法,并建立了基于DSP28335的编码器光电信号自动补偿系统,如文献[4]-[8]所示,在此基础上,改进补偿系统数据输出模式,建立该补偿系统控制器与数据中继站、总控计算机三级通信结构组成形成远程控制。将基于莫尔条纹光电信号自动补偿系统采集到的莫尔条纹信号数据经无线传输到PC机,并采用VC++编写了莫尔条纹误差信号故障分析系统,完成信号参数、质量指标、测角精度、误码信息在界面上的显示。编码器系统与工作站间采用Zigbee通信协议,该协议采用IEEE802.15.1规范,实现无线个人局域网的物理层和接入协议是全世界公开通用使用的无线频段,用于一定距离范围内的无线传输,供开源使用。要求发射功率小于1W,一般传输距离在100m左右。数据传输速率最高可达250kbps。IEEE开放了2.4GHz至2.4835GHz频带,工作在此频带的设备有蓝牙、Zigbee、Wi-Fi等。蓝牙功率小、传输距离小,不会对系统构成电磁干扰。Zigbee的底层标准把2.4GHz的ISM频段划分为16个信道,每个信道带宽为2MHz。当Zigbee和Wi-Fi同时使用相同频段通信时,产生噪声干扰,导致传输分组冲突。采用功率控制技术是克服相互干扰的有效手段,可以从降低无线系统发射功率来削弱相互干扰考虑,尽量避免在最大有效的作用距离(100m)内同时有Zigbee源和Wi-Fi源工作。Zigbee源在多传感器系统的自由组网、电磁兼容性、传输距离等方面有着广泛应用。
因此,通过人机交互软件界面,根据编码器理论设计指标,可直观地根据信号误差来分析并诊断编码器的工作状态,并根据分析结果对测量故障类型进行遥测诊断[9-14],直接控制莫尔条纹光电信号自动补偿系统,进而保证光电轴角编码器在复杂工作条件下的测量精度。
1 故障特性分析理论及方法
高精度光电编码器主要由光机结构与电信号处理两部分组成。它常采用散装或整装结构,将码盘直接固定在总体的主轴上,读数狭缝组件等其它部分通过基板固定在总体的基座上,如图1所示。在测量时,只有码盘随机械主轴旋转运动,因为码盘上刻有贮存轴角绝对位置的代码信息,所以照明系统射出的光线透过码盘、狭缝盘入射到接收系统后,将携带绝对位置信息的莫尔条纹光信号转换为微弱电信号,最后由DSP处理系统对电信号进行综合处理后输出角度代码[7-8]。
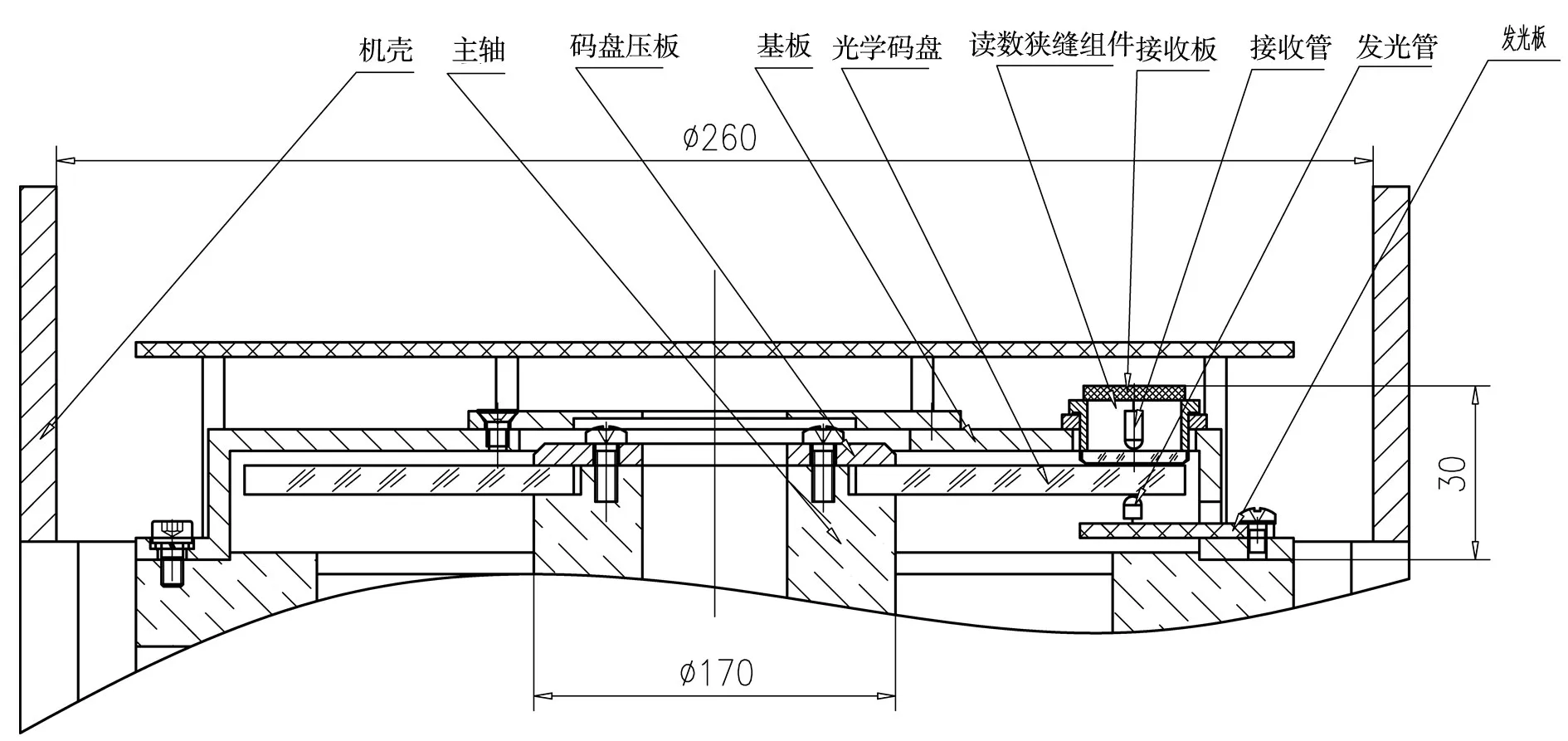
图1 某24位高精度编码器结构示意图
编码器莫尔条纹光电信号是位移信息转换的载体,其质量也是决定测量精度的主要因素,它实质是一种空间信号,根据栅距刻线密度不同,原始莫尔条纹信号波形可以是梯形波、近似三角波、近似正弦波。若栅距相等、缝宽和线宽均相等的两光栅叠加在一起,且不考虑光栅的衍射作用,则根据莫尔条纹产生机理,光通过光栅副后的能量分布为一个三角波。本文以长春光机所研制的21位以上的高精度绝对式编码器为研究对象,其码盘刻有四条精码道,四条码道相位互差90°,每条精码道由16384对线/周的光栅码道构成,每对线对应转角79.1",则莫尔条纹光电信号的节距为79.1"。当非平行光通过刻线密度小于20lp/mm的光栅时,才有可能获得三角波。因此对于较高精度编码器而言,输出的莫尔条纹信号波形为近似正弦波[9]。
与此同时,莫尔条纹光电信号各项质量指标直接反映编码器工作状态信息[10-12]。即:光电信号的节距、波形、幅值、相位、对比度等不仅反映测角精度信息、可靠性信息,且其动态变化及特征也反映编码器工作情况,通过信号参数还可诊断编码器故障及其动态附加误差。
综上,在莫尔条纹光电信号自动补偿处理的基础上,针对多工作编码器,改进补偿系统,附有无线通讯功能的传输设计,遥测控制补偿系统进而提高角度测量的可靠性和完善性。
2 故障数据遥测分析系统
系统采用三级通信方式,利用协调器选通通道选择控制系统中的编码器单元,针对各个单元,遥测系统采用多头读数提取各个位置的精码莫尔条纹信号,当编码器精码光电信号出现偏差或者测量产生误码时,故障分析系统作为监测窗口,可作为编码器信号自动补偿系统的故障诊断系统开始启动控制,尤其当编码器应用在航天系统或地面系统中时,系统会有两种工作模式:正常监测模式和误差诊断模式,当测量出现偏差时,计算误差信号偏差的信息量,控制莫尔条纹光电信号补偿系统进入补偿模式时,对编码器光电信号实行遥测控制,其控制速度及测量精度不会长时间影响整个应用系统的精度。
2.1 改进的光电信号补偿处理系统
光电信号传输处理的硬件原理框图如图2所示。原补偿系统的核心处理芯片选用TI公司推出的浮点型TMS320F28335处理器,专门针对精码莫尔条纹光电信号设计;TMS320F28335的捕获单元,是数据采集部分的关键单元,每个捕获单元都有对应的定时器作为时钟基准且有对应的捕获引脚,当捕获引脚检测到处理器指定跳变时,定时器值将一同捕获并自动输入到对应两级FIFO堆栈中,由此计算捕获引脚所接外部信号矩形脉冲的变化频率。
采用AD5254数字电位计作为精码信号光电流/电压转换元件,通过给滑动端控制寄存器分配赋值调控端子位置,来调节电位计阻值的大小。选择14位的并行A/D转换器AD7865-1系列对精码莫尔条纹信号进行采集,因4个通道间具有同步采样功能,所以模拟输入信号间的相位信息可以存留,其输入管脚均有过压保护功能,增强了器件工作的稳定性和抗干扰性。同时,芯片转换后的并行数据可与3V处理器直接进行连接,并与控制器数据存取时序相同,提高了两芯片间的通信速率。

图2 莫尔条纹光电信号硬件采集处理框图
对连接A/D转换器控制引脚的芯片采用Xilinx公司生产的XC95144-10PQ160I型号的工业级可编程逻辑器件CPLD,I/O引脚可承受3.3V或5V,主要完成粗码信息、精粗码信息间的译码与校正;对信号的调理采用OP27GP放大器和LM139比较器,放大器将编码器光机头部输出的四路精码信号差分放大后生成正、余弦信号送入AD7865;比较器将一路正弦信号整形为方波信号,直接送入DSP28335的捕获引脚,则由于粗码方波频率与原始精码正弦信号的频率相同,因此DSP可以自适应的获取精码光电信号。
在此基础上,遥测系统的通讯接口控制器的主控芯片采用STM32F103RBUT6芯片,该芯片由意法半导体生产,基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM Cortex-M3内核;无线通信的器件采用成都无线龙二次开发的CC2530模块,统一采用20帧扩展接口。其中CC2530由TI公司生产,该芯片工作在2.4GHz频ISM频段上,遵守IEEE802.15.1、ZigBee通信协议,无线传输距离在50m以外,具有ARM7内核,信道带宽为2MHz,具备串行数据无线通信功能,可满足在温度控制器与控制芯片的有线通信,在协调器组与中继计算机有限通信的功能。CC2530模块的软件开发平台采用IAR Embedded Workbench,具备C/C++交叉编译器和调试器,是目前最完整和最容易使用的专业嵌入式应用开发工具。
2.2 无线通信结构设计
通常情况下,机器人系统、伺服系统会在各关节或者俯仰方向、方位方向上各使用多个编码器,其各个编码器单元的补偿系统均采用了CC2530模块作为通信终端,为提高单元补偿系统控制器与总控计算机的数据传输的实时性,编码器单元模块与中继站采用双通道数传结构,其Zigbee组网的拓扑结构图如图3所示。

图3 Zigbee组网络拓扑结构图
Zigbee组网络系统有1台协调器,1台路由器(可管理15个编码器单元终端),协调器与路由器安装在中继站上,协调器负责组网,总控数据经协调器发向各个终端,各终端执行状态由终端经路由器发回总控计算机,这样,将下行数据与上行数据分开形成两个独立信道,可解决Zigbee组网中中低速网络阻塞的问题,提高系统的通信性能。所有协调器与路由器芯片集成在中继站的外围设备上。
在该CC2530的通信过程中采用串口转换芯片MAX485,MAX485是用于RS-485与RS-422通信的低功耗收发器,每个器件中都有一个驱动器和接收器,具有限摆率驱动器,可以减少EMI,并降低由不恰当的终端匹配电缆引起的反射,实现最高250kbps的无差错数据传输。
中继站配置16通道RS485串行卡,每一路与对应的路由器与协调器形成串行通信总线信道。每一路对应的终端、路由器、协调器采用不同信道频率与组网IP值,避免信号相互干扰。
2.3 无线传输通讯接口
伺服控制系统中常利用多个编码器进行不同视角及空间位置信息的传输,因此数据传输系统由总控计算机、数据中继站、各个编码器等三级通信结构组成远程遥测。查找控制指令由总控计算机发出,经TCP/IP网络协议传送至中继站,考虑到伺服系统里独立通讯的器件数较多,为减少传输假设的复杂性以及减少通信间的相互串扰,故障分析系统采用无线Zigbee协议进行通信。同时由于Zigbee通信方式能实现网络节点的灵活组合,组网时没有空间架设上次序要求,同时无线的工作模式可大量减少系统中的数据传输链路。其无线传输距离在100m内有效。
数据传输系统的结构图如图4所示。

图4 系统数据传输结构图
中继站部分由中继计算机与Zigbee协调器组组成,之间采用RS485串行总线方式进行通信。独立编码器的数据处理电路内部设计了Zigbee终端的收发器件,中继站可利用Zigbee协调器将伺服系统总控计算机的各控制数据发送至独立编码器的控制器;独立编码器的控制器测量数据及莫尔条纹光电信号测量数据也可反向经此数据传输通道传至总控计算机,从而实现总控计算机到独立编码器的双向数据传输。
中继站与总控计算机采用TCP/IP有线网络数据传输,主控计算机计算不同编码器单元的执行情况,对不同温度下编码器单元光电信号的数据进行偏差计算,通过中继站将修正控制量发送至各个编码器单元,根据计算值实时控制光电信号自动补偿系统,实现编码器单元的高精度修复控制。
3 人机交互界面设计
当编码器工作的旋转速度稳定时,由采集系统将自适应采集的精码光电信号数据传到PC机,在莫尔条纹信号质量偏差计算辨识研究的前期工作基础上,为了快速地对工作条件下的光电信号进行分析,以方便对编码器系统进行遥控,本文采用VC++编写了莫尔条纹信号自动分析系统[8],完成算法的编写并将信号参数、质量指标、温度测量信息在界面上进行一并显示,如图5所示。
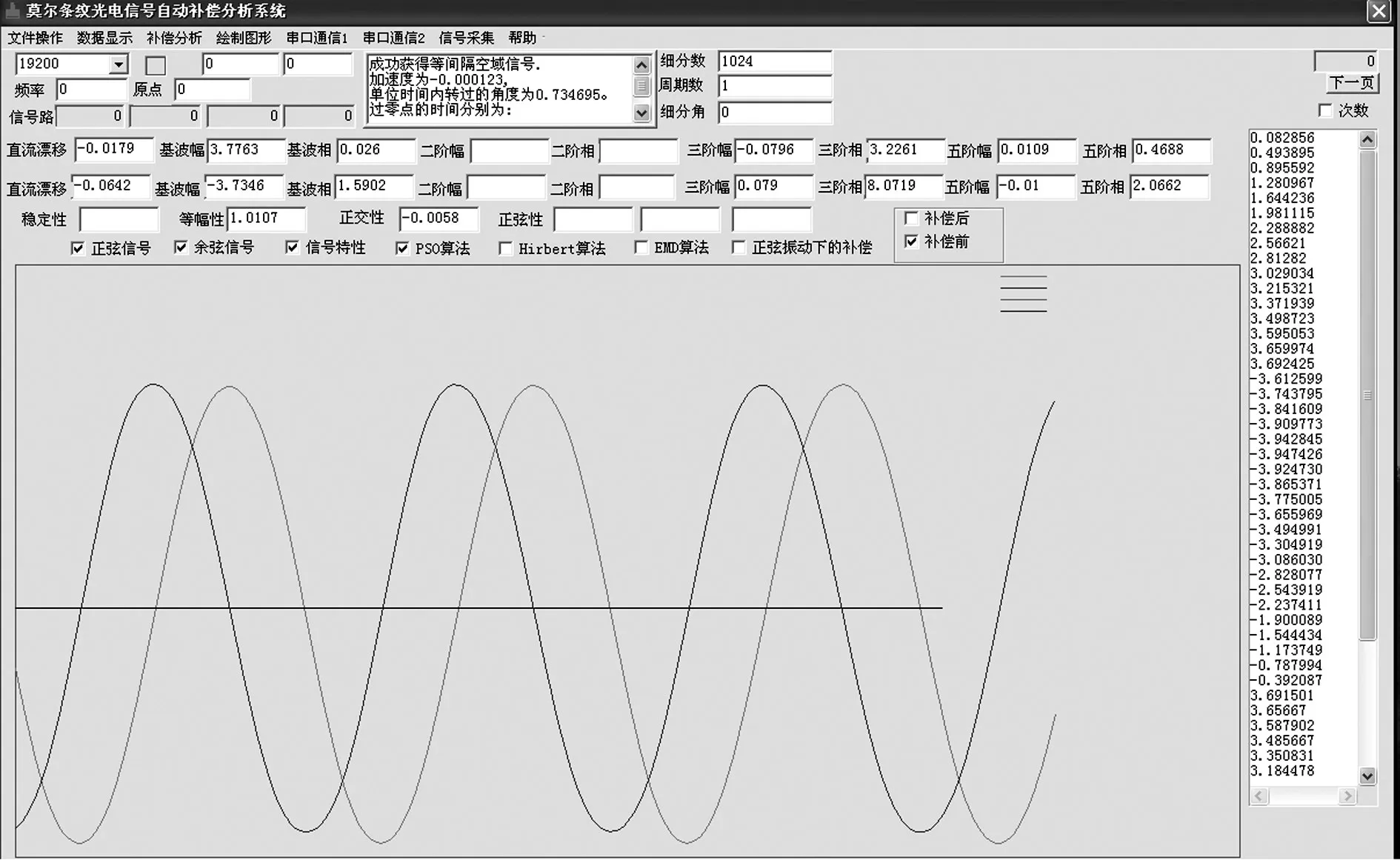
图5 莫尔条纹自动分析软件系统
以采集的某24位光电编码器为例,图中右侧竖排窗口显示的是周期莫尔条纹信号时域内自适应采集数据,即可成功获得等间隔空域信号;通过辨识算法的处理,可直观显示信号的直流漂移、基波幅值与相位、二阶幅值与相位等信息,同时可自动计算稳定性偏差、等幅性偏差、正交性偏差、正弦性偏差等偏差量,目前该界面设计了五阶以下的波形信息,可直接与所设计的编码器性能指标做对比;同时采集的信号波形以及合成的李沙育图在界面上可直观显示,如图5中的精码正弦波、精码余弦波[14-15]。
中继站通过协调器逻辑选择伺服系统中的各个编码器单元,进而采集莫尔条纹光电信号,总控计算机通过人机交互软件界面,可直观地根据编码器信号质量来分析并诊断各个编码器单元不同温度下的工作状态。尤其在恶劣工作环境下,可监控采集不同温度下的信号数据,且在应用系统容忍响应时间较小的场合,可利用该自动分析系统直接观测信号质量,通过遥测并将计算好的参数直接经无线传输送到数据处理系统,对独立编码器进行远程控制,尤其适用于编码器在外场工作环境下的调试和远距离的传感器数据传控。
4 实验及数据分析
根据上述描述,采集某系统中各编码器单元头部上、下、左、右四路信号在不同温度条件下的数据的示意图如图6所示。
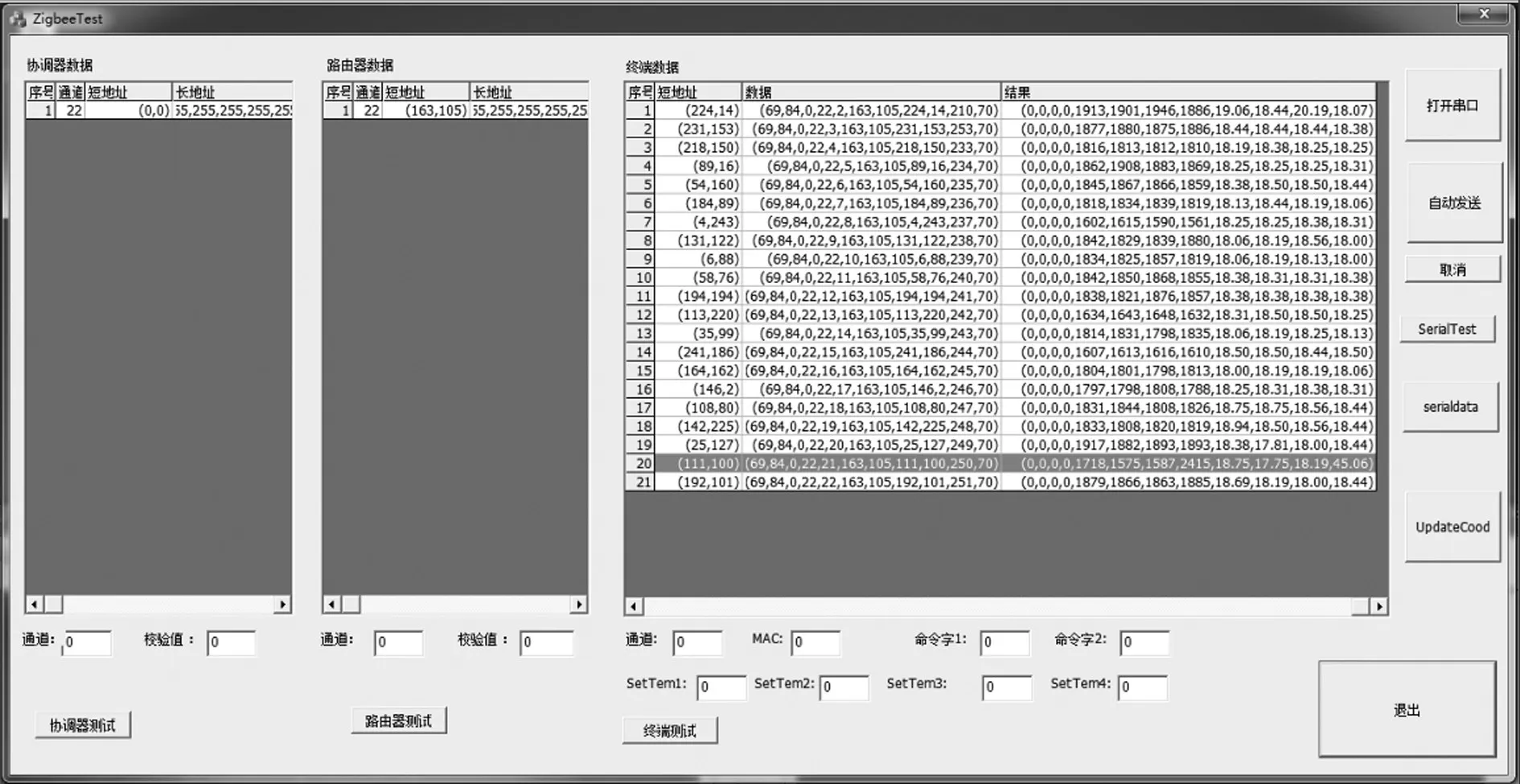
图6 各个编码器单元工作的温度数据传输界面
系统以某实验过的23位光电编码器为实验对象,通过机械装调改变莫尔条纹光电信号的正交性。在20°C温度下,利用本文的故障分析系统采集0°、90°、180°、270°等四路精码波形,并对差分后的两路正余弦信号进行谐波分析,同时采用粒子群算法对5阶以内谐波进行参数分析,采集的某周期光电信号信息及图形如图7所示。

图7 23位编码器光电信号分析图
可见,该周期内,光电信号的参数信息通过该软件界面可直接读取。且正交性偏差较大,约为0.18弧度;同时存在较小的等幅性偏差及直流漂移误差,其偏差量也可直接计算,进而通过无线通讯传输将偏移信息传递给补偿系统。由此可以分析,在不同温度条件下,采集不同的光电信号值也可以通过该软件计算出细分误差峰峰值,并在右侧文本框中直接显示,以此细分误差来评估编码器工作状态下的测量精度。
5 结论
为提高光电编码器的空间适应性、可靠性和可维护性,在莫尔条纹光电信号自动补偿技术的基础上,结合典型石油地下探测系统、机器人系统、伺服控制系统等应用多传感器组网的背景,建立了基于无线通讯的多传感器信号、测量信息采集及数据传输系统,设计了智能诊断的软件系统。具体基于莫尔条纹误差信号建立了多光电轴角编码器的故障诊断遥测系统。在前期莫尔条纹光电信号自动补偿系统建立的基础上,结合中继计算机与总控计算机站的无线通讯传输设计,改进了补偿系统的通讯接口设计,并完成了温度数据、信号波形、采集数据、参数、偏差量信息等软件窗体的显示。同时根据计算的偏差补偿量,总控计算机可远程控制自动补偿系统的修复功能。
该系统尤其适用于多高精度光电编码器的外场工作环境,不仅为工程技术人员快速地对编码器系统工作状态进行诊断提供了有效的信息,节省了大量的人力、物力和财力,同时为卫星通讯系统目标遥测、石油地下探测系统的准确监测奠定了硬、软件基础,具有重要的理论意义和应用价值。
[1]Peter Gregorčič,Tomaž Požar,Janez Možina.Phaseshift error in quadrature-detection-based interferometers[J].Optical Sensing and Detection,2010(77260):1-10.
[2]郭鹤,陈建冬,曹国华.智能矩阵式光电编码器速度加速度测量方法研究[J].长春理工大学学报:自然科学版,2014,37(1):41-44.
[3]李晨冉,曹国华,丁红昌.光电编码器误差补偿及精度校验[J].长春理工大学学报:自然科学版,2013,36(4):20-31.
[4]高旭,万秋华,赵长海,等.莫尔条纹光电信号细分误差的实时补偿[J].红外与激光工程,2013,42(11):1-5.
[5]高旭,万秋华,赵长海,等.莫尔条纹光电信号正交性偏差的实时补偿[J].光学精密工程,2014,22(1):227-234.
[6]高旭,万秋华,卢新然,等.光栅条纹光电信号正弦性偏差的自动补偿[J].光学学报,2013,33(7):1-6.
[7]高旭,万秋华,杨守旺,等.提高光电轴角编码器细分精度的改进粒子群算法[J].红外与激光工程,2013,42(6):1508-1513.
[8]高旭,万秋华,卢新然,等.莫尔条纹光电信号自动补偿系统[J].红外与激光工程,2016,0217002:1-6.
[9]Michael Warner,Victor Krabbendam,German Schumacher.Adaptive periodic error correction for Heidenhain tape encoders[C].SPIE,2008,7012:70123N.
[10]郭汉洲,宋延嵩.光通信终端中编码器信号正弦性的EMD修正[J].长春理工大学学报:自然科学版,2012,35(3):59-63.
[11]Dario Mancini,Annalina Auricchio,Massimo Brescia,et al.Encoder system design:strategies for error compensation[J].SPIE,2008(3351):380-386.
[12]Tsukasa Watanabe,Hiroyuki Fujimoto,Kan Nakayama,et al.Automatic high precision calibration system for angle encoder[J].SPIE,2003(5190):400-109.
[13]Tan KK,Zhou HX,Tong HL.New interpolation method forquadrature encodersignals[J].IEEE Trans.Instrum.Meas,Oct.2002,51(5):1073-1079.
[14]王显军.光电轴角编码器细分信号误差及精度分析[J].光学精密工程,2012,20(2):379-386.
[15]高旭.莫尔条纹光电信号自动补偿技术研究[D].长春:长春光学精密机械与物理研究所,2014.
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
花火·绘阅读(2021年8期)2021-09-05
哈尔滨轴承(2020年2期)2020-11-06
童话世界(2019年28期)2019-11-23
小福尔摩斯(2019年2期)2019-09-10
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
成都信息工程大学学报(2018年3期)2018-08-29
西安工程大学学报(2016年6期)2017-01-15
探测与控制学报(2015年4期)2015-12-15