基于搜索引擎结构的多传感器管理机制
2018-01-12 06:54:07
探测与控制学报 2017年6期
(重庆工商大学融智学院大数据研究所,重庆 401320)
0 引言
传感器管理是数据融合[1]的反馈环节,包括多传感器提示和传感器控制两个方面,主要解决多个传感器探测(包括检测、识别、跟踪)多个目标时的资源调度问题[2]。传感器管理具有集中式、分散式和混合式三种结构[3],管理机制有基于英式拍卖协商协议的传感器管理机制[4],管理方法有决策论、信息论、规划论等多种[5],管理理念上引进动态联盟的思想[6],其最终目的是确定多目标多传感器分配方案并根据战场态势实时调整,以达到传感器网络的最佳探测效能。在传感器管理方法方面:文献[7]介绍了一种基于能量感知的传感器节点选择算法,参考传感器节点的信息效用、通信能耗和剩余能量进行传感器分配。文献[8]提出了一个带整数线性规划的多项式时间三阶段启发式算法来求取传感器分配方案。文献[9]建立了传感器提示过程中无线传感器的能耗模型,提出了一种蝙蝠算法优化神经网络算法。文献[10]提出一种利用目标战术重要性函数量化求解目标优先级的方法。文献[11]研究三目标任务分配问题,基于0-1非线性规划理论建立代价函数,用离散粒子群优化算法求解传感器分配方案。
上述模型存在两方面缺点:一是在研究传感器管理时,对传感器的实时性探测跟踪问题考虑较少,仅仅研究静态的传感器分配问题而不结合动态需求;二是传感器管理过程中仅仅考虑分配方案综合效能的高低,而不考虑是否满足单个目标的探测精度和能耗需求。本文针对此问题,提出了基于搜索引擎结构模型的传感器管理机制,用改进人工狼群算法在此机制下求解多传感器对多目标跟踪联盟方案。
1 多传感器管理机制
传感器管理的开展是建立在对传感器网络中的传感器信息已知和对来袭目标信息进行了一定预判的条件下进行的。当传感器网络同时对多个目标进行跟踪时,由于传感器资源有限和没必要对威胁度低的目标保持较高跟踪精度,对目标的跟踪精度并不是越高越好[12]。在此提出一种基于搜索引擎结构模型的多传感器管理机制,在满足对目标的跟踪精度需求和能耗需求的条件下,寻找适应度最佳的传感器跟踪联盟方案。
1.1 搜索引擎结构模型
搜索引擎一般定义为:以信息检索的方式寻找网络中用户所需信息资源的数据库服务系统[13],基本结构如图1所示。
各部分名称及其功能:
搜集器:搜集、整理并向数据库上传信息;
搜集端数据库:接收并保存搜集器上传的信息,向挖掘器提供参考信息;
分析器:分析查找用户所需信息,并向索引器上传信息;
索引器:接收分析器上传的信息,分析整理好的数据,建立索引,并向检索端数据库上传信息;
检索端数据库:接收索引器上传的信息,保存与检索相关的信息;
检索器:接受用户请求,对用户的检索请求作出响应;
挖掘器:提取和分析用户检索信息,提高用户检索效率;
用户信息库:记录有关用户检索的信息。
1.2 多传感器管理结构
基于搜索引擎模型的传感器管理机制如图2所示。
搜集器:搜集有关传感器网络和目标的信息,包括传感器类型、位置和性能等,以及目标属性、速度、类型等,将搜集到的信息上传给传感器信息数据库和目标信息数据库;
传感器信息数据库:接收、整理并保存搜集器搜集的关于传感器网络的信息;
目标信息数据库:接收、整理并保存搜集器搜集的关于来袭目标的信息;
分析器:对分配多传感器,建立分配方案,将分配方案上传给分配方案数据库;
索引器:根据给定的分配方案评价方法,计算各个分配方案的评价指标值,并把该评价指标值作为索引上传到索引数据库;
检索端数据库:接收、整理并保存索引器上报的索引;
检索器:对用户的检索请求作出响应,搜索检索端数据库为用户提供传感器管理方案;
用户界面:输入对目标的跟踪精度和能耗需求,显示传感器分配结果。
1.3 传感器管理流程
传感器网络中共有个m传感器,某时刻有目标t来袭。当各数据库建立完成后,开始对传感器资源进行管理并组建针对该目标跟踪任务的动态联盟。
在对多目标建立传感器跟踪联盟过程中,对目标t提出跟踪精度需求α和能耗需求β,然后建立传感器跟踪联盟,传感器初步联盟方案为以下几种类型:
①不存在满足目标跟踪精度需求或能耗需求的传感器跟踪联盟方案;
②不存在满足目标能耗需求的传感器跟踪联盟方案,而存在满足目标跟踪精度需求的方案。
③存在满足目标跟踪精度需求的传感器跟踪联盟方案,而不存在满足目标能耗需求的方案。
④存在同时满足目标的跟踪精度需求和能耗需求的传感器跟踪联盟方案。
在此,根据作战态势把传感器对目标的跟踪任务类型type分为三类:
A类:执行此类任务时传感器资源充足,对目标的探测跟踪任务紧急,以保证对目标的跟踪精度需求为主导地位。当满足①和②时,优先提高能耗需求以保证跟踪精度需求。当所有传感器均加入到对该目标的跟踪联盟依旧满足不了对该目标的跟踪精度需求时,降低跟踪精度需求;
B类:执行此类任务时传感器资源紧缺,对目标的探测跟踪任务不紧急,以节省传感器资源为主导地位。当满足条件①和③时,优先降低跟踪精度需求以满足能耗需求;
C类:执行此类任务时传感器资源较为充足,对目标的探测跟踪任务不紧急,保证对目标的跟踪精度和节省传感器资源占据几乎同等重要地位,当满足条件①时任意降低跟踪精度需求和提高能耗需求,当满足②时降低跟踪精度需求,当满足③时降低能耗需求。
若A、B、C三类初步联盟方案满足条件④且传感器跟踪联盟方案仅有一种,则选择该方案为最终联盟方案;若不止一种,则采用适应度最佳原则,选择适应度最佳的联盟方案作为对目标t的最终跟踪联盟方案。设同时满足目标t跟踪精度需求和能耗需求的联盟方案共K种,第k种方案Xk的适应度计算公式为:
(1)
式中,传感器分配方案Xk共m个元素,取值为0或1,有:
(2)
其中,pi为传感器si对目标t的跟踪精度;ci为传感器si对目标t跟踪时消耗的传感器资源。
针对目标t建立传感器跟踪联盟,其传感器管理流程如图3所示。
对目标t建立传感器跟踪联盟步骤为:
步骤1:联盟组建开始;
步骤2:对该目标提出并向用户界面输入跟踪精度需求α和能耗需求β,并确定任务种类type(A、B、C);
步骤3:检索器对数据库进行检索;
步骤4:若满足跟踪精度需求和能耗需求的传感器跟踪联盟方案有且仅有一种,则输出该方案,显示器显示该方案,跳到步骤7;
步骤5:若满足跟踪精度需求和能耗需求且传感器跟踪联盟方案有多种,则按照适应度最佳原则,选择适应度最佳的方案输出,显示器显示该方案,跳到步骤7;
步骤6:若没有同时满足跟踪精度需求和能耗需求的传感器跟踪联盟方案,按照任务类型type执行相应操作;
步骤7:回到步骤1。
步骤8:联盟组建结束。
2 多传感器跟踪联盟模型
2.1 基本模型
传感器网络中共有个m传感器,某时刻共有n个目标来袭。
设多传感器联盟方案X为一个m×n阶的0-1矩阵,有:

(3)
传感器对目标的探测精度P为一个m×n阶矩阵,其中pij为传感器si对目标tj的探测精度。
传感器si对目标tj探测能力pij由式(4)计算得出。
pij=(nij×tij)/(N×T)
(4)
式中,nij表示si对tj探测到的特征个数,tij表示si探测到tj的有效时间,N表示所需探测tj的总特征个数,T表示tj在传感器网络中飞行的总时间。
多传感器联盟X对目标tj探测精度为:
(5)
式中,Pj为联盟方案对目标tj的探测精度。
传感器si重要级importanti表征该传感器在传感器网络中的重要程度,其值大小采用归一化后的值。当占用该传感器时,能耗值costi为:
costi=importanti/Ni
(6)
式中,Ni为传感器si可同时探测目标个数,即传感器探测能力。
多传感器联盟X探测目标tj的能耗为:
(7)
式中,Cj为联盟方案对目标tj探测时的能耗值。
在组建联盟过程中,应使联盟方案X对所有目标的总探测精度P最大和总能耗C最小。因此有目标函数:
(8)
(9)
本文讨论的情况传感器可同时对多个目标进行探测,但传感器si实际同时探测的目标个数ni不能超过其可同时探测的最多目标个数Ni。在传感器分配过程中,针对目标tj组建的多传感器联盟中传感器个数nj不能为0。因此有约束条件:
ni≤Ni
(10)
nj≥0
(11)
式中,ni为传感器si实际探测目标个数,nj为针对目标tj组建的探测联盟中的传感器个数。
多传感器联盟X的适应度F(X)表征该传感器方案优劣程度。F(X)应与系统总能耗成反比,与系统总探测精度成正比,因此有以下基本计算公式:
F(X)=P/C
(12)
若采用此种方法计算适应度值,作为评判联盟方案的依据,容易选择以下两种存在问题的方案作为分配结果:
1)适应度值较高可能是由于能耗过小造成的,不一定能够保证对目标的探测精度需求;
2)适应度值较高可能是由于探测精度过高造成的,不一定能够保证对目标的能耗需求。
针对此问题,并考虑目标tj对我方的威胁度Rj,传感器分配方案X的适应度值大小的可用下式计算:
(13)
式中,αj和βj分别为给定的对目标tj的最低探测精度和最高能耗。
由式(13)可知,只有当Pj>αj且Cj<βj时,该式才成立,因此使用该式所为适应度函数时能够保证求得的最终多传感器联盟方案满足对每个目标的探测精度要求和能耗需求。
2.2 求解方法
在基于搜索引擎模型的传感器管理机制中,检索器采用改进人工狼群搜索算法(多传感器跟踪联盟方案求解算法)检索传感器分配方案。人工狼群算法是2007年Yang等人模拟狼群捕食行为提出的一种智能寻优算法,具有较好的全局收敛性和计算鲁棒性[14]。在人工狼群算法中,存在探狼、头狼、猛狼3种分工,游走、召唤、围攻3种智能行为,及“胜者为王”头狼产生机制和“强者生存”的狼群更新机制[15-16],其关系如图4所示。
文献[14]介绍的基本人工狼群算法存在求解精度不高和易陷入局部最优的问题,在此对其进行改进,提出改进人工狼群算法。
在基本人工狼群算法中,进行寻优的狼群只有一个,当头狼对猛狼进行召唤时,无论猛狼与该头狼距离远、近,都向该只狼群靠拢。在改进人工狼群算法中采取N0个狼群同时搜索的策略,算法初始化和狼群更新时选取适应度排名较高的前N0个狼作为头狼,按照距离最近原则把N1只猛狼分成N0类,探狼只接受距离它最近的头狼召唤,并向其移动。采用改进后的人工狼群算法,一方面可以提高算法的全局搜索能力,另一方面还能缩短猛狼向头狼方向移动的时间,提高算法收敛速度。
设N个0-1矩阵X1,X2,…,XN为算法初始化过程中N个探狼对应传感器跟踪联盟方案,探狼Xt和Xr之间的距离采用曼哈顿距离:
(14)
应用改进人工狼群算法解决多传感器跟踪联盟问题,算法步骤如图5所示。
3 仿真实验与结果分析
假设一传感器网络由6个传感器构成,某一时刻共有5个目标来袭。传感器对目标的探测能力见表1。
表1 传感器对目标跟踪精度表Tab.1 Tracking precision of sensors to targets
在仿真实验过程中,狼群个数N0,探狼个数N,猛狼个数N1和循环次数k越大,算法收敛速度越慢,运行时间越长,但全局搜索能力越强结果精度越高;狼群个数N0,探狼个数N,猛狼个数N1和循环次数k越小,算法收敛速度越快,运行时间越短,但全局搜索能力越弱,结果精度越高。经过多次实验,四个参数可取如下值,既能保证较强的全局搜索能力,又能取得较为理想的算法运行时间:取狼群个数N0=3,探狼个数N=10,猛狼个数N1=30,循环次数k=50。
3.1 针对单目标的传感器跟踪联盟组建过程
当仅考虑单目标t1来袭时,对目标t1提出的跟踪精度需求和能耗需求:跟踪精度下限α1=0.98,能耗上限β1=0.02。
任务类型type=A时,传感器网络对该目标建立跟踪联盟的过程如表2所示。
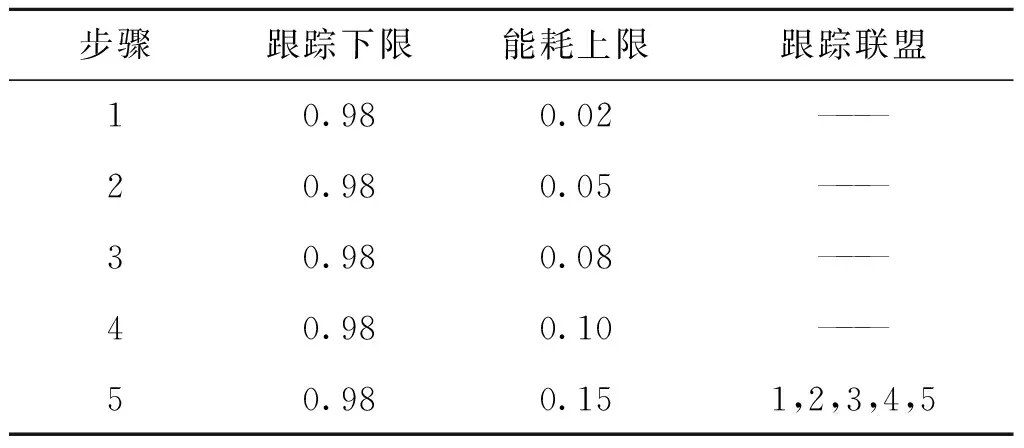
表2 传感器跟踪联盟建立过程(type=A)Tab.2 The process of building multi-sensor tracking coalition(type=A)
任务类型type=B时,传感器网络对该目标建立跟踪联盟的过程如表3所示。
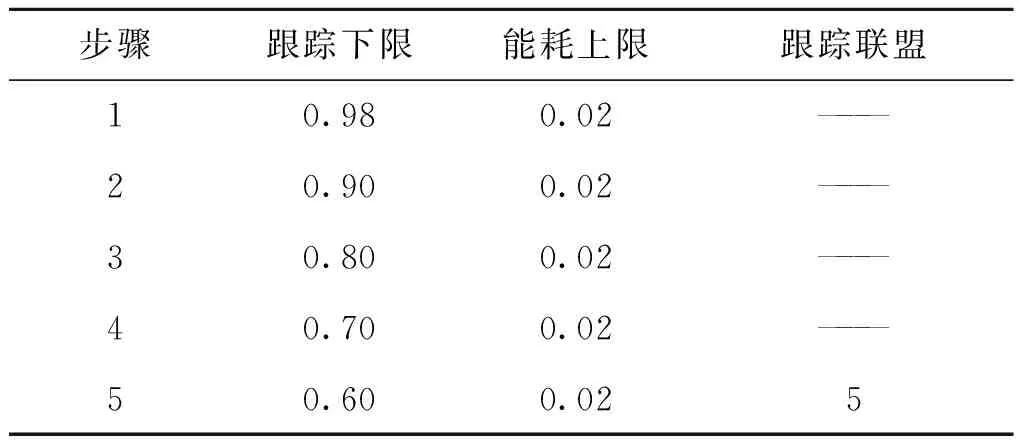
表3 传感器跟踪联盟建立过程(type=B)Tab.3 The process of building multi-sensor tracking coalition(type=B)
任务类型type=C时,传感器网络对该目标建立跟踪联盟的过程如表4所示。
任务类型不同时所得联盟方案的实际跟踪精度和能耗变化对比如图6所示。
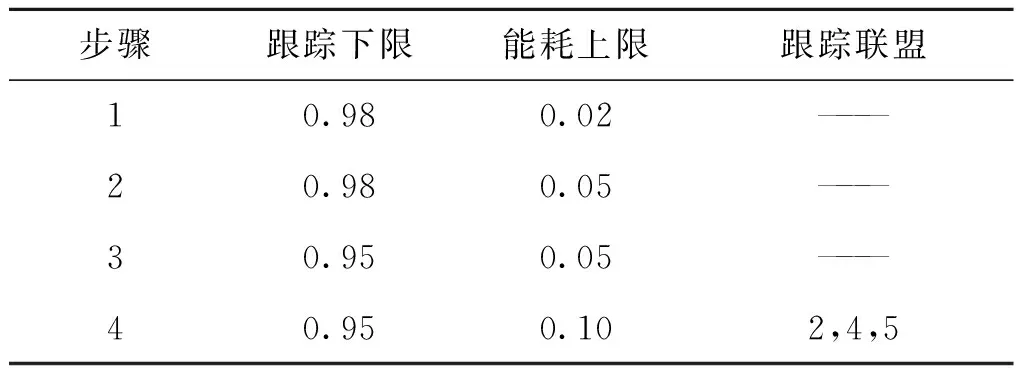
表4 传感器跟踪联盟建立过程(type=C)Tab.4 The process of building multi-sensor tracking coalition(type=C)
3.2 针对多目标的传感器跟踪联盟方案
当对目标t1,目标t2,目标t2,目标t4,目标t5的跟踪精度下限分别为:0.80,0.85,0.85,0.61,0.75,能耗上限分别为:0.15,0.16,0.15,0.12,0.10时,采用基本人工狼群算法与改进狼群算法计算最佳适应度,分别进行100次试验并取平均值,其结果曲线变化如图7所示。
由图7可知,采用基本人工狼群算法和改进人工狼群算法都能够有效得到传感器跟踪联盟方案。但基本人工狼群算法在计算34次后收敛,得到的联盟方案的适应度为3.563,改进人工狼群算法在计算13次后收敛,得到的联盟方案的适应度为3.969。人工狼群算法在改进后,算法在寻优过程中更易跳出局部最优解,且收敛速度有所提高,寻优能力增强。
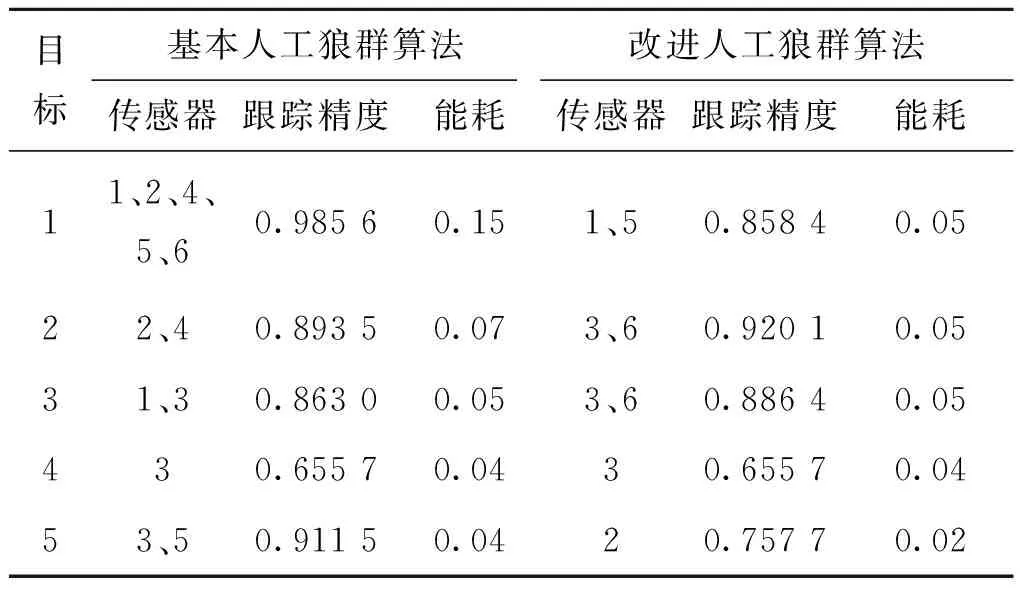
表5 传感器跟踪联盟方案Tab.5 The multi-sensor tracking collation scheme
人工狼群算法在改进后寻优能力增强的原因:一方面增加了狼群个数,算法的全局搜索能力增强,使得在计算过程中更易跳出局部最优解;另一方面,猛狼只接受离其最近的头狼的召唤并向其靠拢,算法的收敛速度有所提高。
3.3 模型改进前后对比
当对目标t1,目标t2,目标t2,目标t4,目标t5的跟踪精度下限分别为:0.80,0.85,0.85,0.61,0.75,能耗上限分别为:0.15,0.16,0.15,0.12,0.10时,应用改进狼群算法计算最佳适应度,分别进行100次试验并取平均值,其结果曲线变化如图8所示。
由图8可知,当限定对目标的跟踪精度下限和能耗上限时,与不限定对目标的跟踪精度下限和能耗上限相比,收敛速度有所提高,但得到的传感器跟踪联盟方案的适应度降低。不限定对目标的跟踪精度下限和能耗上限时,虽能得到适应度较高的传感器跟踪联盟方案,但一味追求较高的适应度而不能保证对每个传感器的跟踪精度需求和能耗需求。例如,得到的方案中,对目标t1的跟踪任务仅由传感器s5完成,对目标t1的跟踪精度为0.632 4,没有达到要求的跟踪精度下限0.80,从这一角度来说,并没有完成对目标t1的跟踪任务。
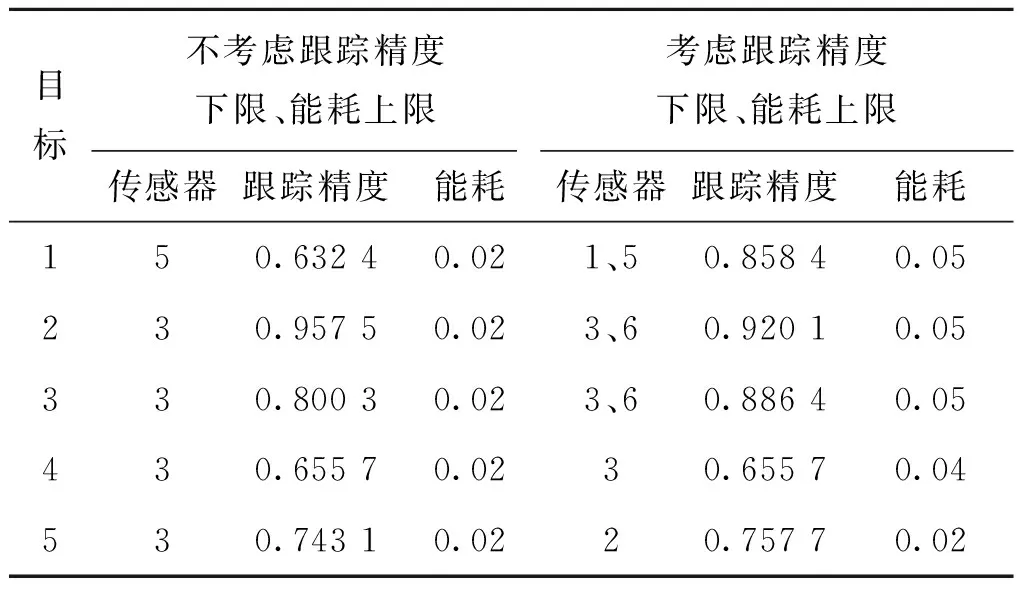
表6 传感器跟踪联盟方案Tab.6 The collation scheme
限定对目标的跟踪精度下限和能耗上限与不限定对目标的跟踪精度下限和能耗上限相比,收敛速度有所提高的原因是,符合算法寻优条件的可行解个数较少,搜索范围降低,故在较短时间内就能找到最佳联盟方案;分配方案适应度降低的原因是,由于限制了对目标的跟踪精度和能耗,对目标的跟踪效果较为苛刻,必然以牺牲联盟方案的适应度为代价。
4 结论
本文提出了基于搜索引擎结构的多传感器管理机制。该机制以对单目标的跟踪精度需求和能耗需求为关键词搜索传感器跟踪联盟方案,并介绍了以该机制为基础的传感器网络对目标建立跟踪联盟方案的过程。建立了在多目标来袭的情况下考虑目标跟踪精度需求和能耗需求的传感器跟踪联盟模型,继而提出检索器检索传感器跟踪联盟方案的改进人工狼群算法。仿真结果表明,采用基于搜索引擎结构的多传感器管理机制,以改进人工狼群算法作为检索算法,能够有效找到既满足单目标跟踪精度需求和能耗需求,又具有较高适应度的传感器跟踪联盟方案,模型具有合理性,算法具有效性。
[1]LeBlanck, Saffiotti. A multi-robet location: fuzzy fusion approsch[J]. IEEE Transon Systems, Man, and Cybernetics, PartB: Cybernetics,2009,39(5):1259-1276.
[2]Ng G W, Ng K H, Wong L T. Sensor management-control and cue[C]// The 3rd international conference on information fusion, Singapore, 2000.
[3]田康生,朱光喜,徐毓. 基于多代理技术的传感器管理系统[J]. 现代雷达,2004,26(2):9-14.
[4]樊浩.多传感器交叉提示技术及其在目标探测中的应用研究[D]. 西安:空军工程大学,2012.
[5]刘先省,申石磊,潘泉. 传感器管理及方法综述[J]. 电子学报, 2002(3):394-398.
[6]樊浩,黄树彩,高美凤,等.多传感器交叉提示多目标探测动态联盟技术研究[J].宇航学报,2011,32(11):2380-2386.
[7] KANG H,LI Xiaolin. Power-aware sensor selection in wireless sensor networks[C]//Proc of the 5th International Conference on Information Processing in Sensor Networks.2006.
[8] YU Y,VIKTOR K P. Energy-balanced task allocation for collaborative processing in wireless sensor networks[J].Mobile Networks and Applications, 2005,10(12):115-131.
[9]王华东,王大羽. 蝙蝠算法优化神经网络的无线传感器网络数据融合[J]. 激光杂志,2015,36(4):164-168.
[10]朱卫宵,祝前旺,陈康. 一种基于遗传算法的多传感器多目标分配方法[J]. 电子信息对抗技术,2015,30(3):30-34.
[11]蒋志强,廖晓峰,刘群. 基于0-1规划的异构传感器网络任务分配策略[J]. 计算机应用,2012,32(4):913-916.
[12]王琳,于雷,寇英信,等. 以任务需求为驱动的多传感器资源管理方法[J]. 系统工程与电子技术, 2010, 32(9): 1925-1930.
[13]李红梅. 智能元搜索引擎关键技术研究[D]. 西安: 空军电子科技大学, 2009.
[14] YANG Chenguang,TU Xuyan,CHEN Jie.Algorithm of marriage inhoney bees optimization based on the wolf pack search[C]//Proc of International Conference on Intelligent Pervasive Computing,2007:462-467.
[15]吴虎胜,张凤鸣,吴庐山. 一种新的群体智能算法——狼群算法[J]. 系统工程与电子技术, 2013, 35(11): 2430-2438.
[16]周强, 周永权. 一种基于领导者策略的狼群智能算法[J]. 计算机应用研究, 2013, 30(9): 2629-2632.
猜你喜欢
计算机仿真(2022年8期)2022-09-28 09:53:02
小学生学习指导(低年级)(2021年9期)2021-10-14 07:57:00
中学生数理化·七年级数学人教版(2019年10期)2019-11-25 07:34:00
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:28
乐活老年(2019年5期)2019-07-25 01:18:18
小学生学习指导(低年级)(2018年9期)2018-09-26 05:59:46
小学科学(学生版)(2018年1期)2018-01-31 01:51:28
中学生天地(C版)(2016年2期)2016-08-23 12:06:26
中国塑料(2016年11期)2016-04-16 05:26:02
教育与职业(2014年16期)2014-01-19 01:24:36