提取局部特征的机械异常运行检测算法
2018-01-12 07:00:20,,
探测与控制学报 2017年6期
, ,
(1.陕西法士特汽车传动集团公司,陕西 西安 710077;2.中国兵器工业第203研究所,陕西 西安 710065)
0 引言
机械故障是设备失去或降低其规定功能的事件或现象,表现为设备生产运行异常,某些零件失去原有的精度或性能,使设备不能正常运行、技术性能降低,致使设备中断生产或效率降低而影响生产。机械在正常运行过程中,容易受到外界和自身的影响,产生异常情况,如果能及时发现并及时维修,可保证正常生产。文献[1]提出能自动选择种子点的种子填充算法实现图像内部孔洞填充,并结合图像形态学和轮廓跟踪算法实现图像中标引的消除,能够对机械设计图准确而高效地进行填充,且能够准确提取出机械设计图像的主轮廓。文献[2] 提出了基于知识和邻接关系的机械图像综合识别方法和机械图像的重构方法,对典型的时域机械图像和频域机械图像进行了准确和有效地识别和重构。文献[3]对振动信号进行检测,分析异常声振信号的产生机理、频率范围、传播特性等数据,根据不同类型故障的产生原因和特征表现,为现场检测提供检测和判断依据。根据机械故障图像的检测需求及现有方法误差较大的局限性,提出提取局部特征(Extracting Local Features,ELF)的机械异常运行检测算法。
1 提取局部特征
机械物运行可以有许多表示具体含义的特征区域,通过这些有特征的信息对机械的正常运转进行识别。一般情况下,可以检测到机械物的轮廓形状特性,对其进行描述并分析[4-6]。目前,对于机械物局部特征的研究有多种方法,例如尺度不变特征变换SIFT(Scale Invariant Feature Transform)方法。提取机械物的局部信息,找到能够反映机械运行的特征点,分析其方向、旋转角度及幅度大小变化量,对异常运行状态进行检测并识别。
应用尺度不变特征变换提取算法检测机械运行图像空间中的特征点[7-9]。局部特征信息具有在固定尺度的不变特点,对于提取的机械运行图像I(x,y),其空间信息可以表示为:
M(x,y,σ)=G(x,y,σ)*I(x,y)
(1)
G(x,y,σ)为可变幅度高斯函数,定义为:

(2)
式中,(x,y)是图像中的特征点位置,符号*为卷积,σ是幅度可变因子,其值与幅度成反比关系。
在不同幅度状态下,高斯变换核与检测图像的卷积生成高斯平方差函数,这样可以用来提取特征点。
D(x,y,σ)=((G(x,y,λσ))2-(G(x,y,σ))2)*
f(x,y)=(M(x,y,λσ))2-(M(x,y,σ))2
(3)
计算领域中相邻幅度的高斯平方差函数,比较并设置检测阈值参数,得到特征匹配点。
2 异常运行检测算法
2.1 确定特征点的方位信息
选取特征点(x,y),分析其特征指标。对确定的特征点进行数学运算后,得到其坐标位置、方向,分析特征点的渐进函数:
(4)
式中,a、b、c为渐进线因子,则变换函数为:
(5)
通常采用以上变换函数的值提取机械物中运行异常的特征点,同时得到其位置及方向信息。
2.2 设特征点的切线方向为主方向
检测机械物运行时,由于提取图像信息的角度不同,则描述运行的矢量均不相同。设特征点的切线方向为主方向,使其不受角度旋转的变化而变化。当其旋转幅度较大时,通过设置一定范围的阈值,定义为异常点。
检测到特征点(x0,y0)的切线方向作为主方向,可以表示为:
(x-a)(x0-a)+(y-b)(y0-b)-c=0
(6)
同时描述特征点的向量信息,计算并分析机械运行轮廓的特征点切线以及其改变角度大小,若方向改变为非匀速或为非正常角度,则提取该特征点为异常点,并停止检修。
2.3 定义幅度配准规则
当机械物正常运行时,标准的工作状态与异常情况有明显差异。通过设置相似性准则,对物体的旋转速度、角度变化、幅度变化进行统计,比较其接近于标准工作状态时的图像幅度则为正常。若差异较大,则为异常特征点。
由于提取的机械运行图像具有较高的旋转型,根据目标的活动特点,设Oi为特征点区域待识别机械运行信息的小部分轮廓,Bj为正常运行模型。
Oi=(Bj-m)+n
(7)
式中,m为幅度的调整参数,n为图像整体高度调整参数。通常,1≤m,n≤5,当机械物出现幅度增大或减小、高度有较大改变时,可观察m和n的值域范围,确定为重点检测特征区域。
对于尺寸大小为1024×768的输入图像,若正常运行模型Bj选取较小,则m,n取值较小。当Bj小于10个像素单位时,m,n取1或2;当Bj在10至20之间时,m,n取3,;当Bj大于20时,m,n取4或5。
3 仿真分析
在以上的研究基础上,采用Intel(R) Core(TM) i5-3210M CPU 2.50 GHz,4 GB RAM,250 GB Hard Drive的系统,仿真软件为MATLAB7.0,对采集的机械运行数据,进行仿真检测,验证算法的有效性。
实验1:正面检测机械运行情况
采用提取局部特征的机械异常运行检测算法对运行的正面机械图像进行分析,主要提取各个运行物之间的幅度变化关系,检测异常并进行标识。检测结果如图1所示。
实验2:侧面检测机械运行情况
采用提取局部特征的机械异常运行检测算法对运行的侧面机械图像进行分析,提取各个运行物之间的旋转幅度及高度变化信息等情况,检测异常并进行标识。检测结果如图2所示。
实验3:检测误差以及识别时间的比较
采用提取局部特征(ELF)的机械异常运行检测算法和SIFT算法分别对采集的一组机械齿轮运行情况进行检测识别,比较两种算法的检测误差并计算其运行时间。SIFT算法的检测误差以及识别时间用eSi和tSi表示,ELF算法的检测误差以及识别时间用eEi和tEi表示,得到如表1所示。
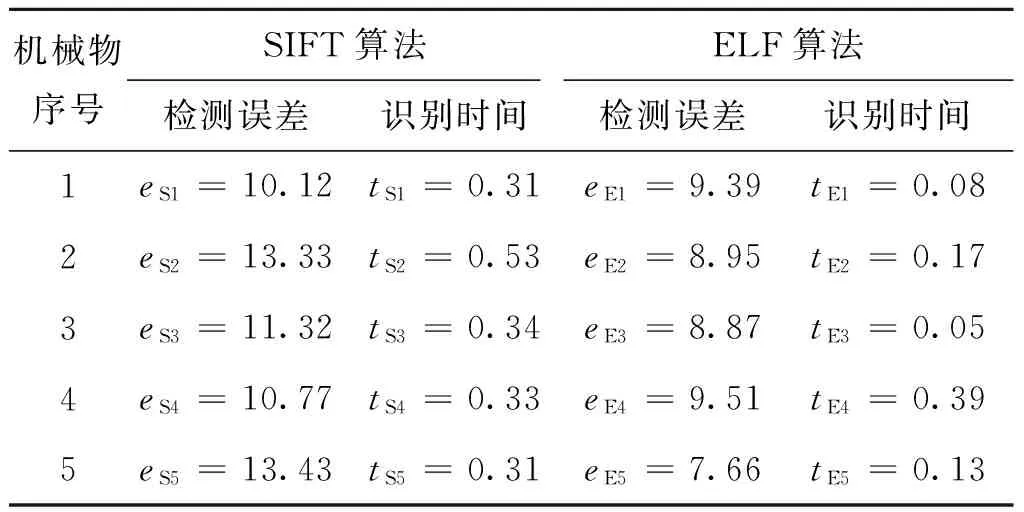
表1 检测误差、识别时间的比较Tab.1 Comparison of error and recognition time
以上实验采用提取局部特征的机械异常运行检测算法对不同的机械运行物进行检测并识别。在实验1、2中,对于检测的正面和侧面机械运行物,新算法都有很好的检测识别效果。在实验3中,对于同一组机械物,分别采用提取局部特征的机械异常运行检测算法和尺度不变特征算法进行检测并识别,比较两种方法的误差和识别时间,仿真结果显示,新算法的检测误差较小、识别时间较短。
4 结论
本文提出了提取局部特征的机械异常运行检测算法。该算法根据机械物在运行方向及位置变换的状态下不易受到变化的特征,提取其局部信息并详细分析机械物的特征点;然后根据机械物的轮廓形状不断变换的特点,设置边缘匹配的法则,实现任意形状变化的匹配与识别。仿真实验结果表明,该方法对不同参照面、不同运动速度等情况有很好的检测及识别效果。
[1]方乃伟,吕学强,张丹,等. 机械设计图像主轮廓提取算法研究[J].计算机工程与设计,2013,34(8):2778-2782.
[2]张金玉,张优云,谢友柏. 机械图像的识别与重构[J].西安交通大学学报,2000,34(2):80-84.
[3]高阳, 于杰, 吴伟晴. GIS 异响的振动信号检测方法研究综述[J].山东工业技术,2017,(3):250-251.
[4] Yeh T, Lee J J, Darrell T. Fast concurrent object localization and recognition[C]//IEEE Conference on Computer Vision and Pattern Recognition, Miami, 2009:280-287.
[6] GANPATRAO N G, GHOSH J K. Information extraction from topographic map using colour and shape analysis [J]. Sadhana, 2014, 39(5):1095-1117.
[7] Gronát P, Sivic J, Obozinski G, et al. Learning and calibrating per-location classifiers for visual place recognition [J]. International Journal of Computer Vision, 2016, 118(3):319-336.
[8] Wu H, Cheng Z, Shi W, et al. An object-based image analysis for building seismic vulnerability assessment using high-resolution remote sensing imagery [J]. Natural Hazards, 2014, 71(1):151-174.
[9] 张永梅,季艳,马礼,等. 遥感图像建筑物识别及变化检测方法[J]. 电子学报, 2014, 42(4): 653-657.
猜你喜欢
课堂内外·小学版(低年级)(2023年6期)2023-04-29 00:44:03
中学生数理化·七年级数学人教版(2022年11期)2022-02-22 22:13:22
数学物理学报(2021年2期)2021-06-09 08:54:42
制造技术与机床(2019年11期)2019-12-04 05:50:54
宇航计测技术(2018年3期)2018-09-08 02:21:24
制造业自动化(2017年2期)2017-03-20 14:26:17
发明与创新(2016年38期)2016-08-22 03:02:50
艺术生活-福州大学厦门工艺美术学院学报(2016年3期)2016-07-31 19:42:13
计算机工程(2015年4期)2015-07-05 08:27:39
股市动态分析(2014年27期)2014-07-29 19:40:43