
模糊内模PID控制在湿法脱硫系统中的应用
2018-01-06 05:34翟奕博刘锁清李军红
自动化与仪表 2017年11期
翟奕博,刘锁清,李军红
(1.山西大学 自动化系,太原 030013;2.山西大学 动力工程系,太原 030013)
模糊内模PID控制在湿法脱硫系统中的应用
翟奕博1,刘锁清2,李军红1
(1.山西大学 自动化系,太原 030013;2.山西大学 动力工程系,太原 030013)
针对石灰石/石膏湿法脱硫系统具有非线性、时变、大迟延、大惯性等特点,设计了模糊内模PID湿法脱硫控制系统。仿真结果表明,该控制策略不仅具有较好的动态性能和稳态性能,而且具有较强的模型适应能力和抗干扰能力,控制品质优于常规PID控制及内模控制。
PID控制;石灰石/石膏湿法脱硫系统;内模控制;模糊控制;方案对比
随着国家经济的高速发展,环境问题也日趋严重,“冬季杀手”雾霾天气、“空中死神”酸雨现象出现的频率越来越高。雾霾、酸雨等环境问题不仅影响着人类的周围环境,而且严重威胁着人类的身体健康。在众多污染物中,SO2是形成酸雨和雾霾的主要原因之一,而我国燃煤电厂污染物排放是SO2的主要来源[1]。面对日益严峻的环境问题,我国相关部门制定了一系列政策法规限制燃煤电厂污染物SO2的排放,可见控制和减少燃煤电厂污染物SO2的排放势在必行[2]。
石灰石/石膏湿法脱硫具有技术成熟、可靠性高、脱硫剂来源广、对煤种适应性强、脱硫产物能够加以利用等众多优点,这一脱硫技术越来越受到现代化电厂的青睐[3-5]。然而,面对越来越严格的SO2排放浓度限值要求,加之石灰石/石膏湿法脱硫反应过程复杂,脱硫效率受众多因素影响,整个脱硫控制系统具有非线性、纯迟延、时变性等特点,原有的脱硫系统手动控制、简单的单回路控制或锅炉负荷前馈控制方法很难满足要求,且控制效果不理想。对此,提出一种模糊内模PID控制算法,并将其应用于某电厂330 MW机组同步建设的石灰石/石膏湿法脱硫系统中,与传统的PID控制、内模控制进行仿真结果比较,验证所提方法的控制效果。
1 内模控制介绍
1.1 理想内模控制
内模控制是基于过程数学模型进行控制器设计的先进控制策略,最早由Garcia与Morari等人于1982年提出,具有设计简单、调节参数少、鲁棒性强、控制性能好等优点,是研究基于模型控制算法的理论基础和提高常规控制系统设计水平的工具[6-8]。其基本结构如图1所示。

图1 内模控制系统结构Fig.1 Internal model control system structure
由图可见,R(s)为控制系统输入,GIMC(s)为内模控制器,G(s)为被控对象,Gm(s)为内部模型,D(s)为扰动输入,Y(s)为控制系统输出。 由图 1可得该闭环系统响应输出Y(s)的传递函数为

由式(1)可以看出,如果被控对象G(s)与内部模型 Gm(s)相等,即 G(s)=Gm(s)时,输出

如果令

那么

说明当选择内模控制器GIMC(s)与内部模型的倒数 1/Gm(s)相等时,控制系统的输出 Y(s)严格等于控制系统的输入R(s),也就是说理想内模控制器能够使系统的输出Y(s)严格跟踪系统的输入R(s)。
1.2 实际内模控制
在实际的工业生产过程中,被控对象模型的建立一般都会有误差,也就是说被控对象G(s)与内部模型Gm(s)不是严格意义上相等的,并且有时候内部模型 Gm(s)的倒数 1/Gm(s)是不存在的,再加之纯迟延环节不可能实现超前控制,因此理想的内模控制是无法实现的。通常需要增加相应的滤波环节形成实际的内模控制,具体步骤为
将内部模型 Gm(s)分解为 Gm+(s)与 Gm-(s),即

式中:Gm+(s)包含了所有迟延环节和非最小相位传递函数;Gm-(s)为具有最小相位的传递函数。 在 Gm-(s)上增加相应阶次的滤波器(滤波器阶次与被控对象阶次一致),保证控制系统的稳定性和鲁棒性。
定义内模控制器为
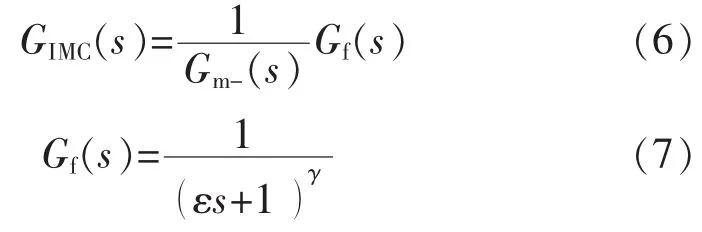
式中:Gf(s)为滤波器;ε 为滤波器参数;γ 为内部模型 Gm(s)的相对阶次。
由式(7)可知,在实际的内模控制系统中,滤波器参数ε是唯一需要设计的参数。ε的选取不仅决定控制系统的闭环响应速度,还影响着整个闭环系统的控制性能。ε越大,闭环系统的稳定性越高,则系统的响应速度降低;ε越小,闭环系统的响应速度越快,但系统的稳定性变差。也就是说ε选取的越大,系统能够容忍的内部模型与被控对象失配程度就越大;ε选取的越小,系统能够容忍的内部模型与被控对象失配程度就越小。
2 模糊内模PID控制算法设计
2.1 内模PID控制器设计
可以对内模控制系统进行等效变换,将内模控制与常规PID控制结合起来,等效变换后内模控制系统的结构如图2所示。

图2 内模控制等效变换结构Fig.2 Internal model control equivalent transformation structure
等效变换后的内模控制系统具有经典反馈控制系统的形式,其中GC(s)为等效变换后反馈控制系统的控制器。因此,可以将控制器GC(s)通过数学变换成常规PID控制器的形式,从而将内模控制与PID控制结合起来,形成内模PID控制,具体实现步骤如下:
根据图2可得:

将式(6)、式(7)代入式(8),可得:

选取典型的一阶加纯迟延系统数学模型,作为石灰石/石膏湿法脱硫系统被控对象的数学模型,即脱硫系统被控对象数学模型形式为

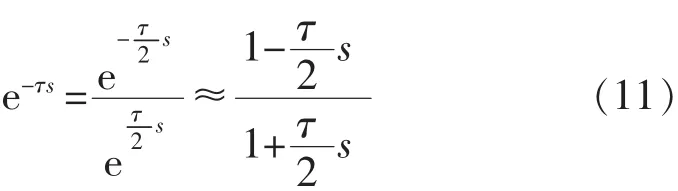
选取内模控制器滤波器的阶数γ=1,将式(10)中的的滞后环节e-τs用一阶泰勒公式逼近,可得:
将式(11)代入式(10),可得:

则有:

将式(7)、式(12)、式(13)代入式(9)中,整理可得:
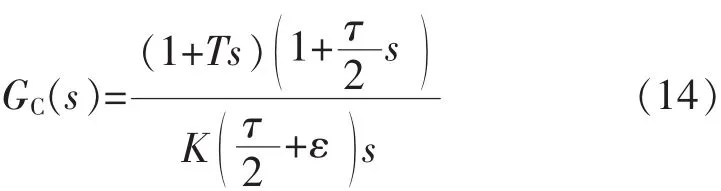
常规PID控制器的结构形式为Kp[1+(1/Tis)+Tds],将等效反馈系统的控制器GC(s)变换为常规PID控制器的结构形式,变换后:

可见,内模控制器经过变换后可以等效为一个常规的PID控制器,并且在等效的PID控制器中只有一个参数可调,即滤波器参数ε。
2.2 模糊内模PID控制器设计
内模PID控制器中只有一个滤波器参数ε可调,且ε的大小影响着整个控制系统的控制性能。因此,可以设计一个模糊控制器,用模糊控制器的输出在线调整滤波器参数ε,从而间接调整内模PID控制器中的Kp,Ti和Td,实现模糊内模PID控制。模糊内模PID控制器的结构如图3所示。
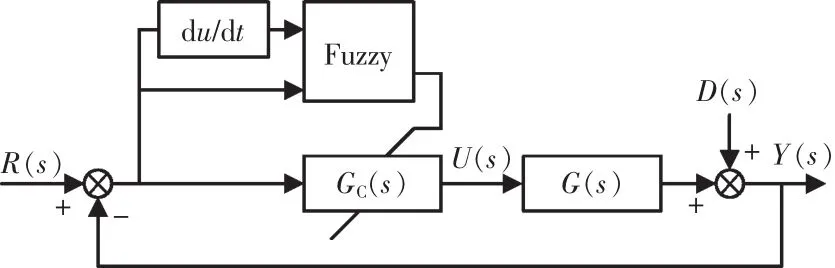
图3 模糊内模PID控制系统结构Fig.3 Fuzzy internal model PID control system structure
当系统的输入与输出不一致时,模糊控制器根据偏差的大小和偏差的变化率来判断内部模型与被控对象的失配程度。根据失配程度的大小,利用模糊规则选择模糊控制器的输出,模糊控制器的输出与初始设置的滤波器参数ε0求和后作为内模PID控制的滤波器参数,在线调整的滤波器参数通过式(16)~式(18)计算后,间接调整内模 PID 控制器中的比例增益、积分增益和微分增益,从而实现模糊内模PID控制。
3 模糊内模PID控制在湿法脱硫系统中的仿真研究
3.1 湿法脱硫系统模型辨识
在此,以某热电厂330 MW机组石灰石/石膏湿法脱硫系统为研究对象,当试验机组及脱硫系统在不同负荷工况下稳定运行时,对吸收塔增加20%的浆液补充量,观察并记录吸收塔出口SO2排放浓度的变化,并对数据进行筛选处理,将处理后的数据分别导入Matlab中的ident工具箱中,选取典型一阶加纯迟延传递函数模型对试验数据分别进行模型辨识。辨识的不同工况下试验机组湿法脱硫系统的模型如表1所示。
3.2 内模PID控制参数计算及模糊控制规则设计
为了保证不同负荷工况下内模控制系统的稳定性,选取较大的滤波器参数ε0=80作为模糊内模PID控制系统的初始滤波器参数,由式(16)~式(18)可计算出各不同负荷工况下内模PID控制器的比例增益、积分时间常数和微分时间常数,其结果如表2所示。
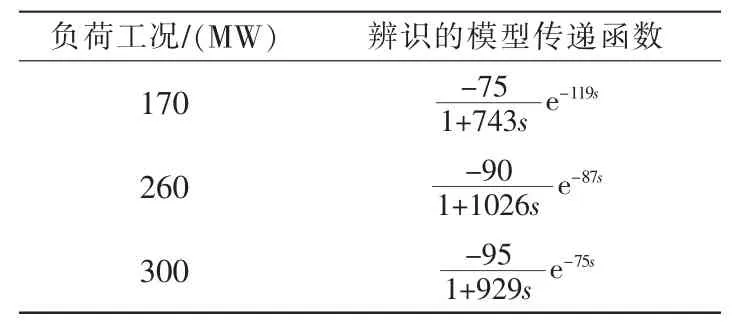
表1 不同工况模型辨识结果Tab.1 Model identification results under different working conditions

表2 不同负荷工况内模PID控制器参数Tab.2 Internal model PID controller parameters in different working conditions
模糊控制器的输入偏差e,偏差e的变化率Δe以及输出u的模糊子集均选择为负大(NB)、负小(NS)、零(ZO)、正小(PS)、正大(PB),模糊控制器输入e,变化率Δe以及输出u的模糊论域均选择为[-3,3],输入偏差e及变化率Δe的模糊隶属度函数均采用高斯型,输出u的模糊隶属度采用三角函数。
根据表2中不同负荷工况下内模PID控制器各参数之间的关系,以及现场湿法脱硫系统运行人员的控制经验制定模糊规则,制定完成的模糊规则如表3所示。
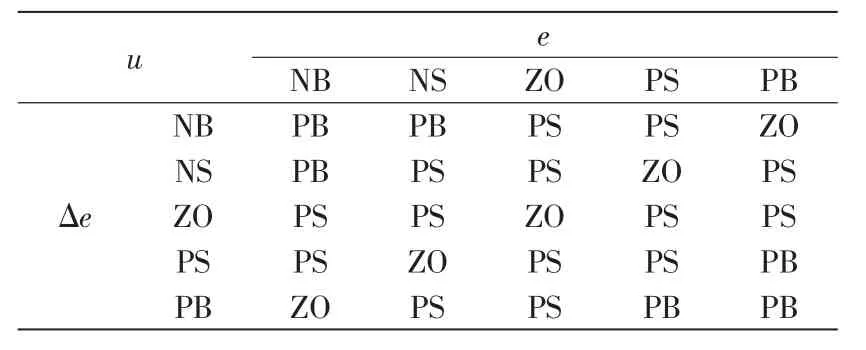
表3 模糊内模PID控制器模糊规则Tab.3 Fuzzy rules of fuzzy internal model PID controller
3.3 模糊内模PID控制系统仿真及结果分析
3.3.1 阶跃响应试验
由于机组260 MW负荷工况处于3种运行工况之间,能免兼顾机组低负荷工况和高负荷工况运行时的情况。因此,以260 MW负荷工况下设计的模糊内模PID控制器为基准,对不同负荷工况进行阶跃响应试验仿真,仿真过程中不同控制器整定的参数如表4所示。并与传统的PID控制、内模控制进行比较,结果如图4所示。
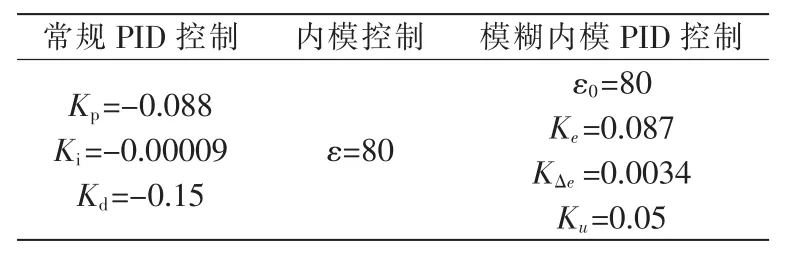
表4 不同控制器的控制参数Tab.4 Control parameters for different controllers
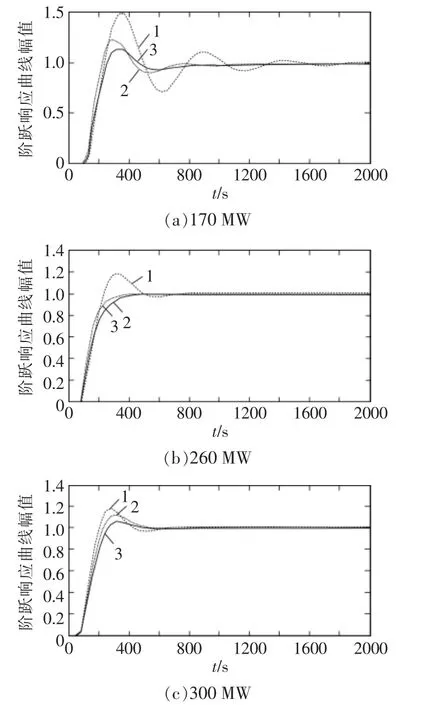
图4 3种负荷工况下的阶跃响应曲线Fig.4 Step response curve under three working conditions
由图4(b)可见,当内部模型与被控对象一致时,内模控制和模糊内模PID控制无论是动态性能,还是稳态性能都好于常规PID控制,但是模糊内模PID控制相较于内模控制的超调量更低、调节时间更短、响应速度更快,具有更好的控制效果。由图 4(a)和图 4(c)可见,当内部模型与被控对象不一致时,常规PID控制下的阶跃响应曲线都不同程度的出现了波动,且极易发生控制不稳定的现象;内模控制下的阶跃响应曲线超调量较小,调节时间较短;而模糊内模PID控制下的阶跃响应曲线具有更小的超调、更短的调节时间,说明模糊内模PID控制对模型变化的适应能力更强,能够达到湿法脱硫系统稳定性、准确性和快速性的控制要求。
3.3.2 阶跃扰动试验
在实际的湿法脱硫系统中,不仅影响脱硫效率的因素众多,而且整个过程受不确定因素的干扰。为了测试模糊内模PID控制系统的抗干扰能力,在t=2000 s时加入d=0.3的阶跃扰动信号,对不同负荷工况分别进行仿真,并将仿真结果与常规PID控制和内模控制结果进行比较,得到的加入扰动后响应曲线如图5所示。

图5 3种负荷工况下加入扰动后的响应曲线Fig.5 Response curve of three working conditions under disturbance
由图5可见,当控制系统存在扰动时,不管控制系统内部模型与被控对象是否一致,模糊内模PID控制下的阶跃扰动曲线在超调量、调节时间等方面均优于其他2种控制方法,而且扰动曲线在模型失配的情况下不会发生较大的波动,说明模糊内模PID控制的抗干扰能力更强,能够克服一些不确定因素对湿法脱硫控制系统的影响,从而保证了试验机组在稳定运行的情况下,SO2排放浓度满足排放标准且基本保持不变的要求。
4 结语
针对石灰石/石膏湿法脱硫系统具有非线性、时变、大迟延、大惯性等特点,提出了一种模糊内模PID控制方案。通过对某热电厂不同负荷工况下的湿法脱硫系统被控对象模型进行仿真,并与传统的PID控制和内模控制进行比较,表明模糊内模PID控制不仅具有较好的动态性能和稳态性能,而且具有较强的模型适应能力和抗干扰能力,能够实现当机组负荷工况变化或受外来不确定因素干扰时,保证湿法脱硫系统SO2排放浓度基本稳定不变和机组经济稳定运行的要求,可以为燃煤电厂同类型机组石灰石/石膏湿法脱硫控制系统改造提供理论基础和参考价值。
[1] 孙荣庆.我国二氧化硫污染现状与控制对策[J].中国能源,2003,25(7):26-29.
[2] 李春晖.300MW循环流化床炉内脱硫控制系统的研究[D].保定:华北电力大学,2011.
[3] 周菊花,孙海峰.火电厂燃煤机组脱硫脱硝技术[M].北京:中国电力出版社,2010:1-91.
[4] Wang Chunyu,Liu Jianqiu,Guo Peng.An analysis of limestone gypsum desulfurization systems[J].Advanced Materials Research,2012,1914(550):667-670.
[5] 阎维平.洁净煤发电技术[M].2版.北京:中国电力出版社,2008.
[6] 黄德先,王京春,金以慧.过程控制系统[M].北京:清华大学出版社,2011.
[7] Jahanshahi E,De Oliveira V,Grimholt C,et al.A comparison between internal model control optimal PIDF and robust controllers for unstable flow in risers[J].IFAC Proceedings Volumes,2014,47(3):5752-5759.
[8] 韦巍,何衍.智能控制基础[M].北京:清华大学出版社,2008.
Application of Fuzzy Internal Model PID Control in Wet Flue Gas Desulfurization System
ZHAI Yi-bo1,LIU Suo-qing2,LI Jun-hong1
(1.Department of Automation,Shanxi University,Taiyuan 030013,China;2.Department of Power Engineering,Shanxi U-niversity,Taiyuan 030013,China)
For wet flue gas desulfurization control system has nonlinear,time varying,large delay and large inertia and other characteristics.A fuzzy internal model PID wet flue gas desulfurization control system is designed.The simulation results show that this control strategy not only has good dynamic performance and stability performance,but also has stonger model adaptability and anti-interference ability.Its control quality is better than PID control and internal control.
PID control;limestone/gypsum wet flue gas desulfurization system;internal model control;fuzzy control;scheme comparison
TP273
A
1001-9944(2017)11-0040-05
10.19557/j.cnki.1001-9944.2017.11.010
2017-04-07;
2017-07-30
翟奕博(1991—),男,硕士研究生,研究方向为火力发电厂系统仿真及控制理论的实际应用。
猜你喜欢
电力科技与环保(2022年3期)2022-07-15
能源工程(2021年3期)2021-08-05
成都信息工程大学学报(2021年6期)2021-02-12
环球时报(2020-08-11)2020-08-11
中国港湾建设(2019年12期)2019-12-18
活力(2019年21期)2019-04-01
电机与控制学报(2018年9期)2018-05-14
人间(2015年11期)2016-01-09
中国建筑金属结构(2013年4期)2013-10-09
