
基于铜耗最小的五相永磁同步电机单相断路故障解耦容错控制*
2018-01-05 04:39:17赵美玲朱孝勇
电机与控制应用 2017年12期
赵美玲, 全 力, 张 超, 朱孝勇
(江苏大学 电气信息工程学院,江苏 镇江 212013)
基于铜耗最小的五相永磁同步电机单相断路故障解耦容错控制*
赵美玲, 全 力, 张 超, 朱孝勇
(江苏大学 电气信息工程学院,江苏 镇江 212013)
为提高五相永磁同步电机故障状态下的转矩性能,提出了一种基于铜耗最小的解耦容错控制方法。在磁动势不变原理与铜耗最小原则的基础上,求解出故障后电机的容错电流,然后根据所求得的补偿电流,推导出电机缺相后的降维变换矩阵,从而建立故障后五相永磁同步电机的数学模型,实现故障后电机的解耦控制。采用联合仿真的方法来验证所提出的容错控制算法。仿真结果表明,缺相后电机的转矩脉动得到了有效的降低,实现了电机的无扰容错运行。
五相永磁同步电机;开路故障;铜耗;解耦;容错控制
0 引 言
电机驱动系统中常见的故障可分为电机绕组故障和逆变器故障,每一类又存在开路和短路故障[1]。发生短路故障时,可以通过硬件故障隔离的方法转换为电机缺相运行[2]。相比于三相电机,多相电机拥有更多的控制自由度,多出的自由度可用来实现电机无扰容错运行[3-5]。这已经成为国内外的研究热点。
目前国内外研究学者提出了多种容错控制算法,大体可以分为两大类:第一类是容错电流的优化控制。基于故障前后磁动势不变原理,通过对剩余相电流的幅值和相位的控制,对故障后的绕组电流进行补偿,从而实现了缺相后电机的平稳运行[6-7]。但是这种方法没有建立电机缺相后的数学模型,因而只能采用电流滞环控制;然而电流滞环控制会导致开关频率不固定,开关损耗增加,谐波含量增多,转矩脉动变大等问题。第二类是采用故障后电机的磁场定向控制方法。Zhao Y等[8-9]建立了六相感应电机在缺相故障下的解耦变换数学模型,实现了电机的矢量控制。然而,这种方法需要处理电机模型在发生故障后的非对称性。文献[10]建立了解耦反变换矩阵,并研究了奇数次谐波分量对基波转矩电流分量产生的影响,从而提出了三次谐波注入的容错控制策略。但是这种方法只适用于反电势中富含三次谐波分量的电机。文献[11]以非对称的双三相永磁同步电机为研究对象,构建的解耦变换矩阵可以使电机同时适用于正常运行状态和容错运行状态,从而简化了容错控制策略。然而,这种方法只适用于双三相电机。文献[12]通过解耦变换和故障前后电机磁动势不变原理,推导出了故障后电机的降维变换矩阵,进一步降低了容错控制的复杂性,可是这种方法只是考虑了幅值相等的约束条件,并没有考虑到电机性能的其他因素。
本文以五相永磁同步电机(Five-Phase Permanent Magnet Synchronous Motor,FPMSM)为研究对象,对一相绕组开路故障进行研究。在磁动势不变原理与铜耗最小约束条件的基础上求解出故障后相电流的表达式,从而在气隙中形成了圆形旋转磁动势,保证电机缺相后的平稳运行。推导了FPMSM发生故障后的正交降维变换矩阵,通过解耦变换矩阵使缺相后的电机电感、磁链矩阵对角化,从而实现了励磁电流分量和转矩电流分量的解耦控制。在矢量控制中,与转矩相关的零序电流分量可以通过传统的PI控制器控制为零,因而降低了转矩脉动以及电流谐波含量。本文的方法能够在电机发生故障后,实现电机控制的完全解耦,降低了系统的复杂性。同时,在降低电机转矩脉动的条件下,实现电机绕组铜耗最小化,实现电机高效率、高性能运行。最后,构建FPMSM联合仿真的模型,对本文所提出的单相开路故障下容错控制系统的先进性和有效性进行验证。
1 电机结构及控制策略
图1是本文研究的20/36极的FPMSM示意图。采用分数槽集中式绕组,保证了各相之间磁路的独立性,因此增强了电机的容错性能。FPMSM运行时,损耗主要包括电机铜耗和永磁体的涡流损耗。永磁体的涡流损耗可以通过优化电机结构的方法降低,而电机铜耗可以通过运行时的控制降低。本文围绕铜耗最小进行研究。
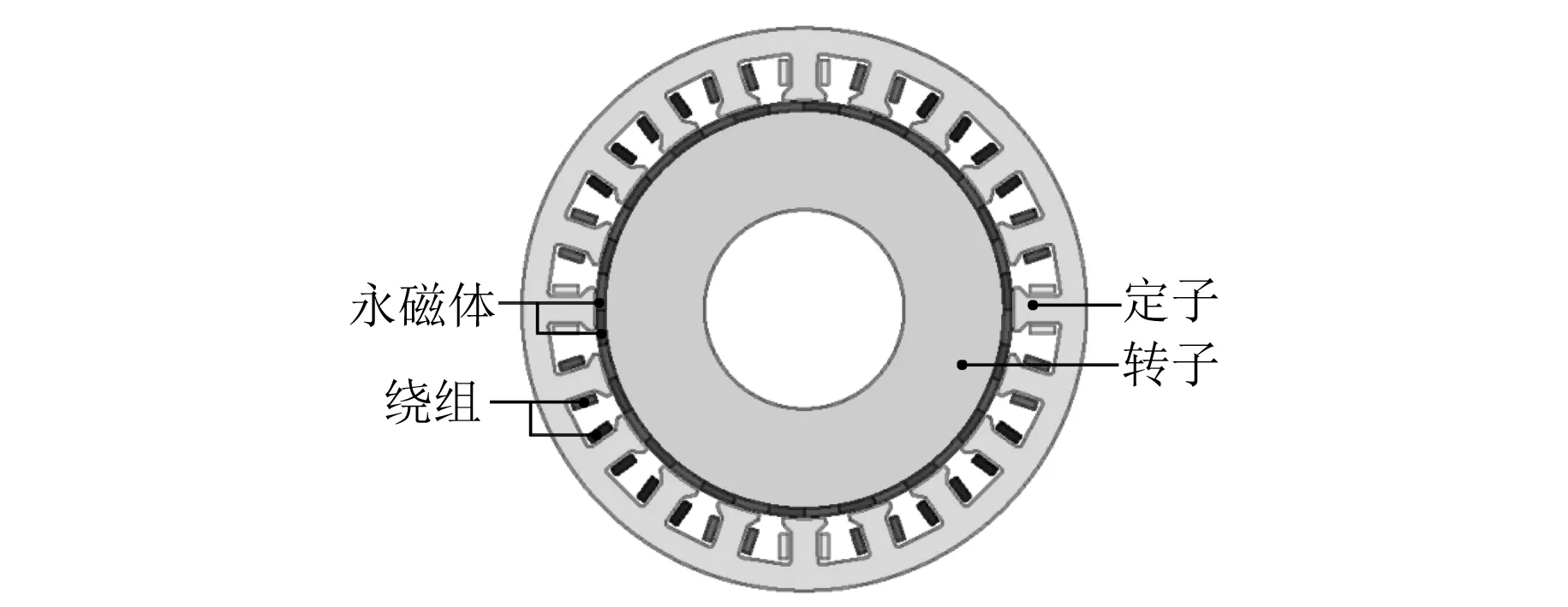
图1 FPMSM截面示意图
电机在正常状态下,由自然坐标系变换到两相静止坐标系的扩展Clarke变换矩阵为[13](等幅值变换)

其中:α=2π/5
本文所研究的20/36极的FPMSM空载反电动势正弦度高,因此反电动势的方程可表示为
(2)
式中:E——FPMSM反电势的幅值;
θ——转子电角度。
转子表贴式电机在正常状态下,为了保证最大输出转矩,绕组中通入的电流应该与电机的空载反电动势相位相同,即采用id=0控制。根据式(1)、式(2),FPMSM正常状态下相电流可以计算出来[14]。
(3)
式中:iA、iB、iC、iD、iE——相电流;
id、iq——定子d、q轴电流。
定子绕组的总磁动势MMF为
NiA+aNiB+a2NiC+a3NiD+a4NiE(4)
其中:a=cosα+jsinα
式中:N——相绕组的匝数。
2 电机容错控制策略
2. 1 缺相后的正交降维变换矩阵
容错控制策略的根本目的是保证电机在发生故障后仍能够输出平滑的转矩,维持电机的平稳运行[15]。分析过程中,设A相发生断路故障,故障后该相绕组电流为零,因此A相不参与机电能量转换。缺相后通过对剩余相电流的幅值和相位进行补偿,实现故障前后定子绕组磁动势相等,进而实现电机的稳定运行。A相开路故障后,合成磁动势可以表示为

FPMSM采用星型连接,且电机的中性点与直流侧母线电容的中性点不相连,故剩余相电流满足如下的约束条件:

式(5)和式(6)组成的线性方程组中含有3个方程4个变量,存在无穷多个解,将电机铜耗最小为目标函数进行优化,如式(7)所示。

则在满足式(5)和式(6)的情况下,采用拉格朗日乘数法求解式(7)的最小值,从而推导出A相断路故障下的电流表达式:
(8)
令
对比式(3)和式(8)可以看出,故障后电机A相电流为零,剩余正常相的电流幅值和相位均发生了变化。A相断路故障后,去除式(1)中与A相相关的元素,得到故障后的变换矩阵:
(9)
式(9)中的行向量不再两两正交,如果仍然采用该解耦变换矩阵进行电机故障下的控制将会产生耦合电流。为了让磁场定向控制能够应用于容错状态,变换矩阵就需要重新定义。
电机在发生缺相故障后,对应相的电流为零,此时电机系统只含有3个控制自由度,选择T1和T2作为基波子空间的基,Z1作为广义零序子空间的基,这三个基两两正交。
电机发生故障后,基波子空间参与机电能量转换。由于式(8)在电机故障下求解电流表达式的过程中隐含电流约束条件,且I1、I2正交,因此可以选择I1、I2作为基波子空间的两个正交基。
广义零序子空间不参与机电能量转换,但是会产生零序电流分量,与电机的铜耗相关,所以选择合适的广义零序子空间的基Z1,使得式(8)所示的缺相后容错电流在广义零序子空间的电流分量为零,也就是说与T1和T2正交,即:

Z1Is=0(11)
根据式(10)、式(11),取Z1为
(12)
考虑到剩余四相电流之和为零,所以扩展的Clarke变换矩阵为
(13)
其反变换矩阵为
(14)
Park和反Park变换矩阵如式(15)所示。

根据式(13)~式(15)可得电机发生缺相故障后由自然坐标系到旋转坐标系的变换矩阵。
2. 2 故障后电机的数学模型
自然坐标系下,电机的电压方程如式(16)所示。
(16)
将式(16)两边同时乘以T1(θ),变换到旋转坐标系下,可得
式中:u=[uBuCuDuE]T;
i=[iBiCiDiE]T;
ψs=ψPM[cos(θ-α) cos(θ-2α) cos(θ+2α) cos(θ+α)];
ψPM——永磁磁链基波幅值。
令udqs=T1(θ)u、idqs=T1(θ)i、ψdqs=T1(θ)ψs,电机在旋转坐标系下的电压方程为
(18)
其中:
Ldqs=
从式(16)~式(18)可以看出,基于电机定子绕组铜耗最小求得的解耦变换矩阵在旋转坐标系下电机的电压方程中,d-q轴之间以及d-q子空间与零序谐波子空间之间的电感未能实现解耦,所以传统的控制方法无法实现对各相电流分量的解耦控制。
2. 3 故障后的解耦容错控制
构造矩阵P,使电感矩阵及磁链矩阵进一步简化。

(19)

(20)
在式(20)中,相电阻中的交变量与交叉耦合量的幅值与转速无关,因而可以忽略这一项的影响。从式(20)所示的电压表达式可以看出,FPMSM正常状态下的电压方程形式与电机发生单相断路故障后的形式是一致的,因而具有完全解耦的能力,所以矢量控制可以运用于电机的容错运行。
由虚位移法求得电机工作在缺相故障状态下的转矩方程,如式(21)所示。
(21)
式中:Wco——电机的磁共能;
θm——转子机械角;
p——电机极对数。
虽然i0不参与机电能量转换,但是却会产生脉动转矩,所以i0应该控制为零,因此电机输出转矩与q轴电流成线性关系。
故障状态下系统框图如图2所示。电机发生故障后,剩余相电流经过正交降维变换矩阵后得到d、q轴电流分量,与给定电流的误差值经过PI控制器后得到电压分量,然后经过P(θ)和正交降维变换矩阵转换为相电压的期望值。相电压的期望值经过逆变器作用在FPMSM的输入端,实现电机的容错控制。
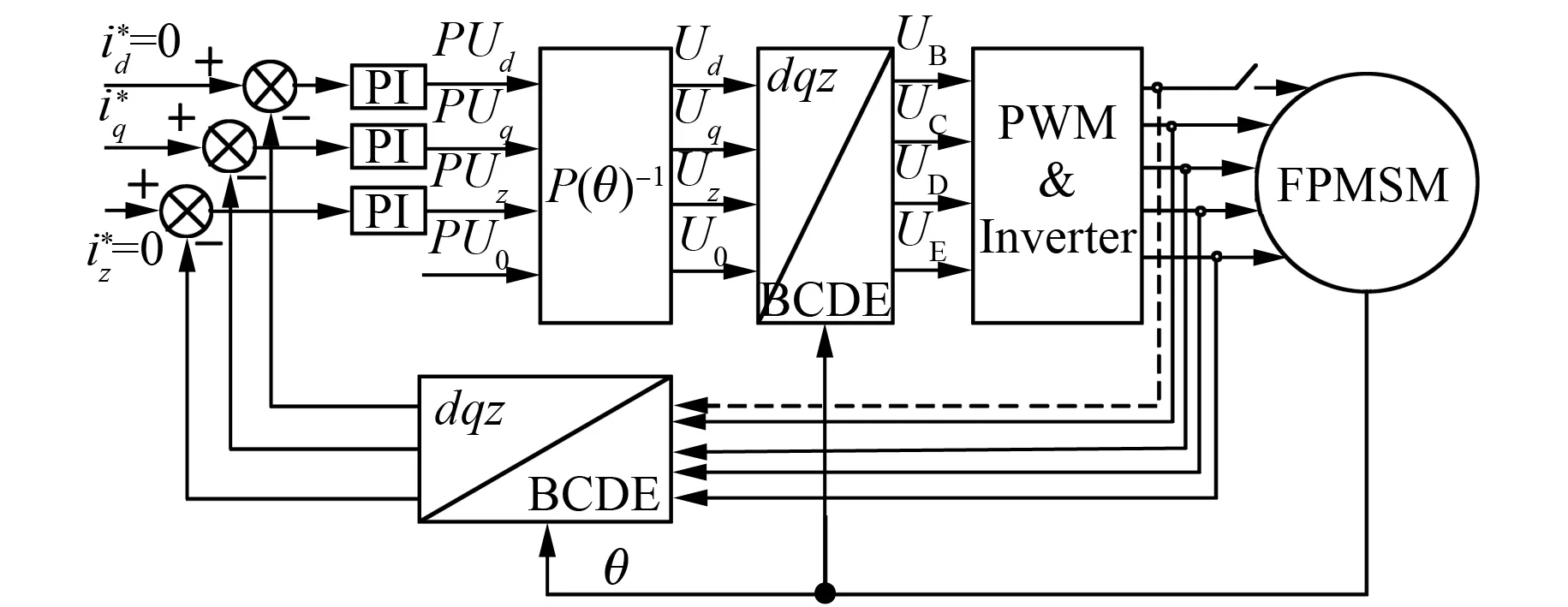
图2 故障状态下系统框图
3 仿真及结果分析
考虑电机的磁路饱和以及强耦合的影响,本文采用Maxwell与Simplorer软件联合仿真的方法,实现电路和磁路的联合仿真,使得仿真结果更接近于实际工况。20/36极的FPMSM联合仿真模型如图3所示。通过让电机分别工作在正常、故障以及容错状态,从而得到不同状态下的电流和转矩波形。
为了更加准确地反映电机在不同状态下的转矩性能,电机转矩脉动系数定义为
(22)

图3 FPWSM联合仿真模型
式中:Tmax、Tmin、Tav——输出转矩的最大值、最小值以及平均值。
FPMSM工作在正常状态(给定转速为1 500 r/min,额定负载为12 N·m)下的联合仿真结果如图4所示。正常状态下,电机的平均转矩为11.75 N·m,转矩脉动系数K为20.51%。可以看出电机在正常状态下,电流波形正弦度较高,各相电流幅值相等。
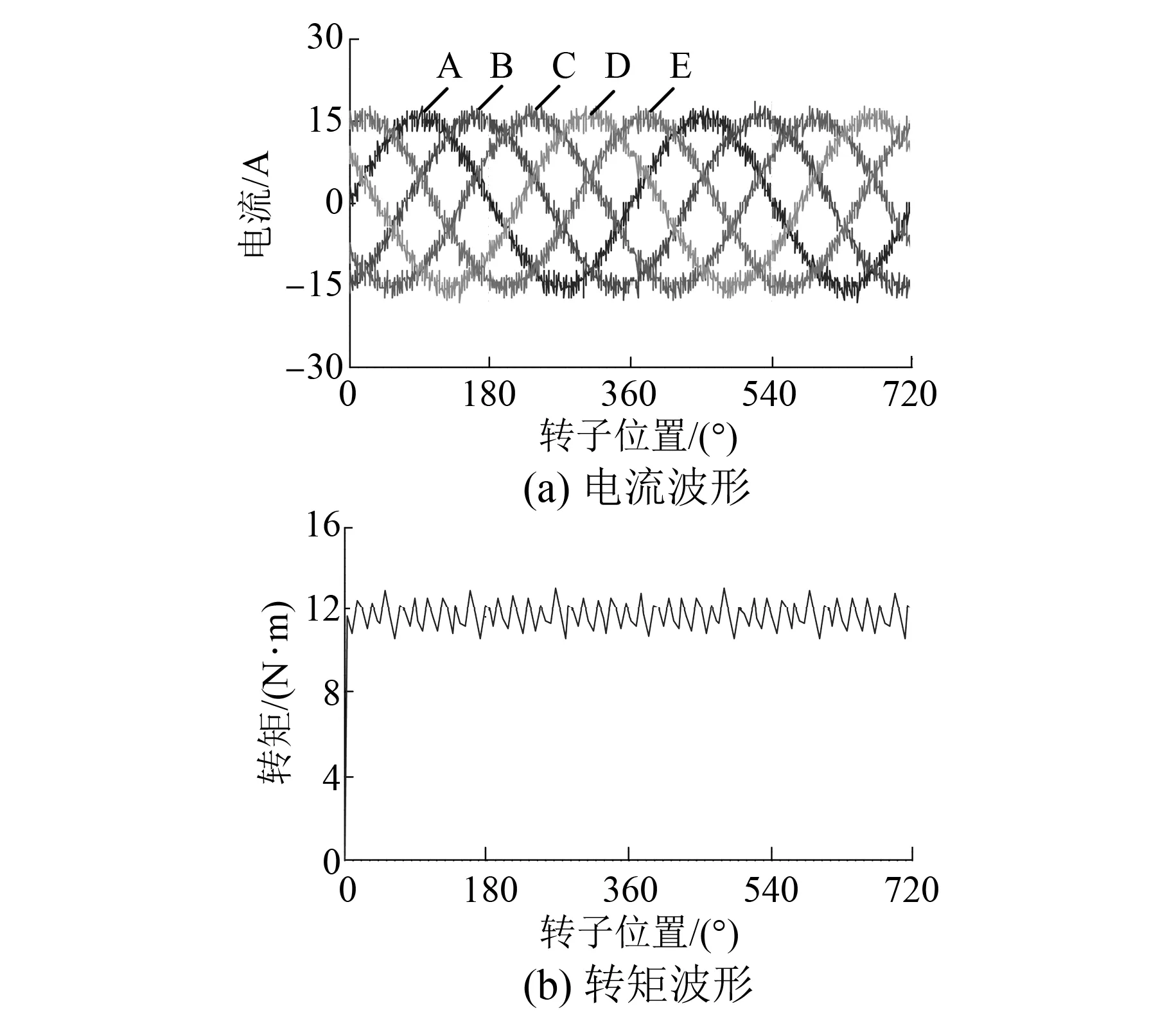
图4 正常状态电流和转矩波形
当电机发生A相断路故障后,未加入容错控制策略,其电流和转矩波形如图5所示。故障状态下转矩的平均值为9.31 N·m,转矩脉动系数K为68.85%。为了维持转矩性能,各相电流幅值与正常状态相比略微变大。由于电机缺失了一相,导致电机整体的性能下降。转矩脉动变大,电机运行在不平衡状态。
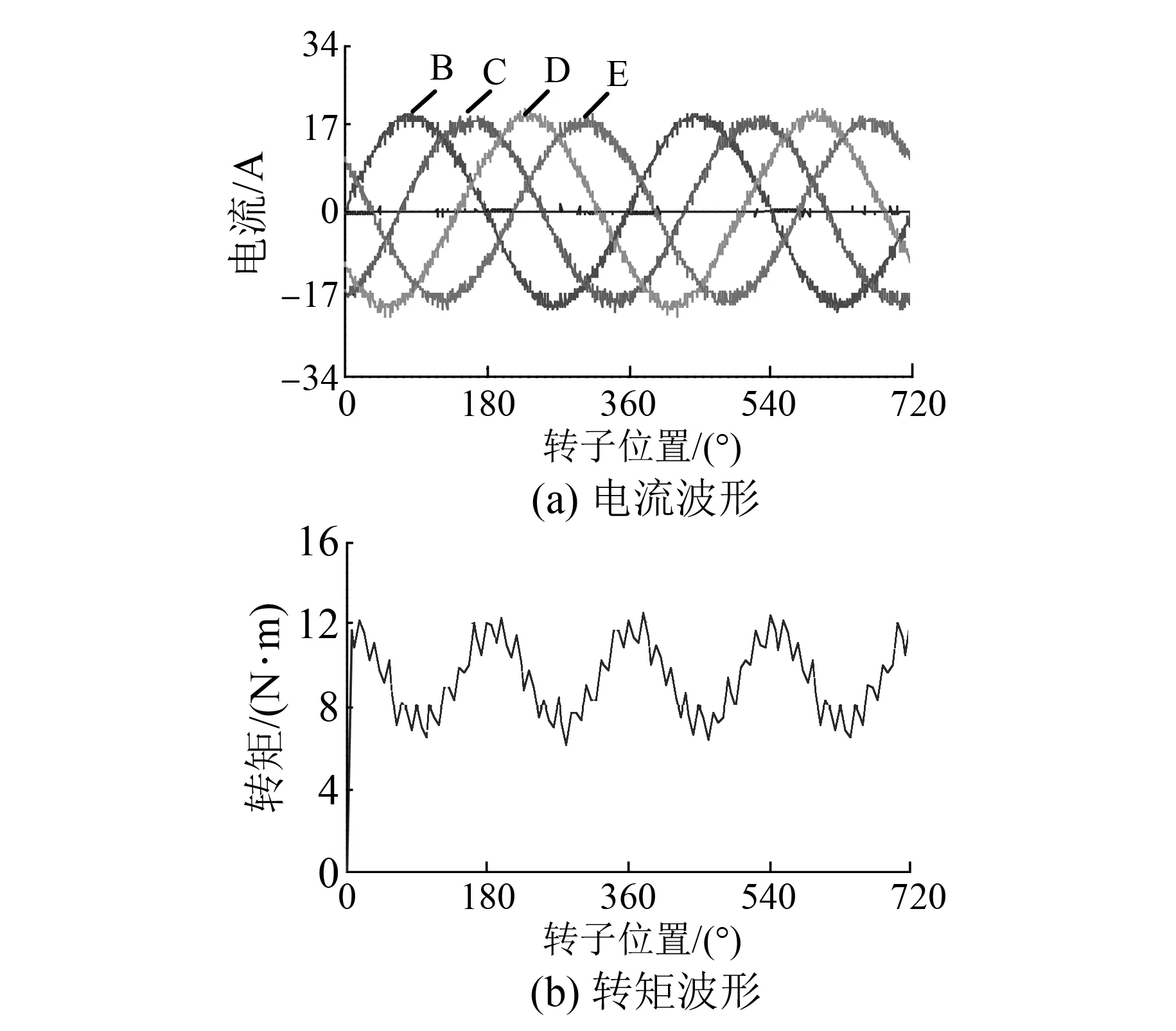
图5 故障状态下电流和转矩波形
电机发生A相断路故障,采用本文所提出的容错控制策略对剩余相的电流进行补偿。加入容错控制策略后的电流和转矩波形如图6所示。
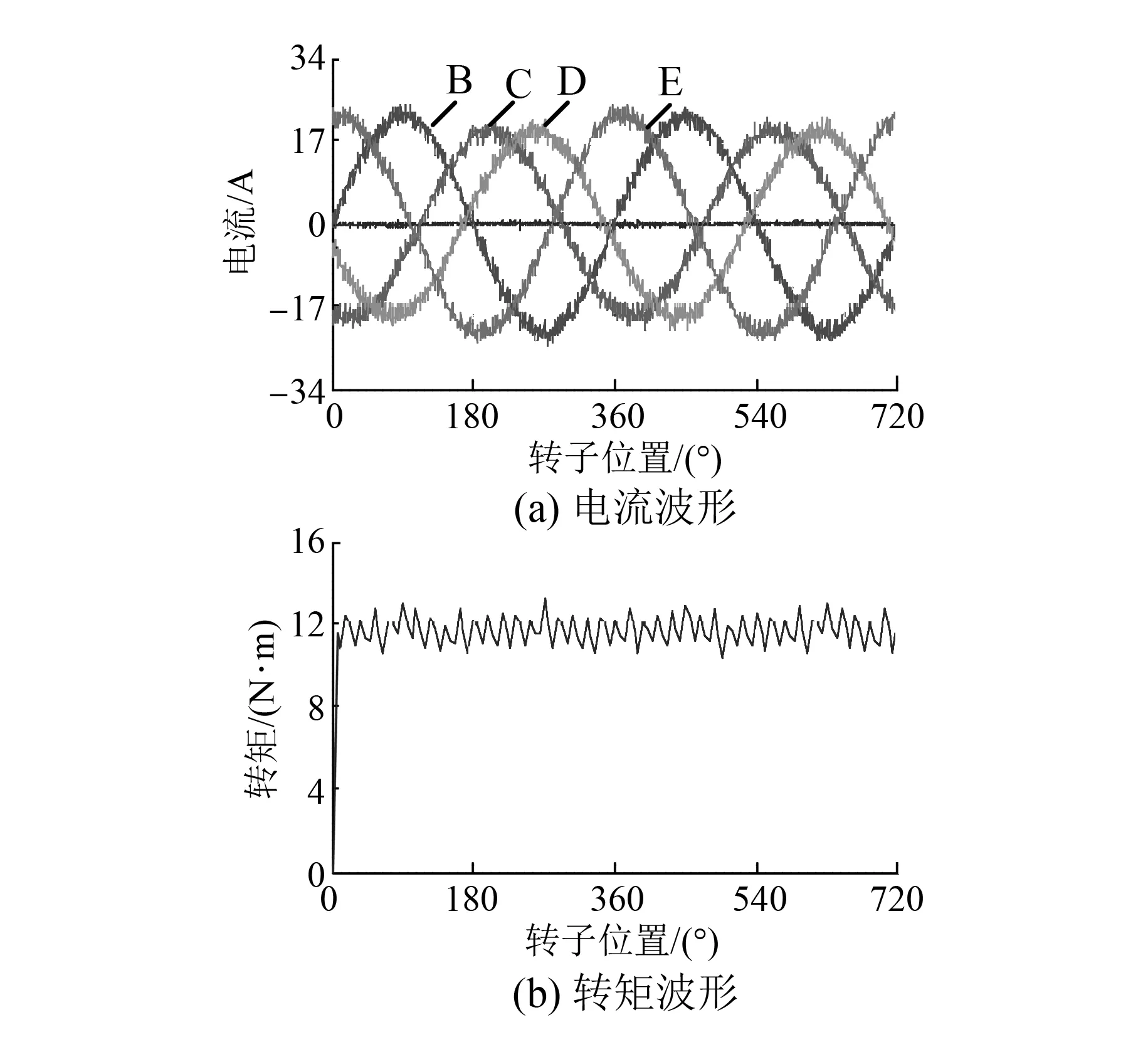
图6 容错状态下电流和转矩波形
容错后的平均输出转矩为11.85 N·m,转矩脉动系数K为24.64%。从图6中可以看出,通过对剩余相电流进行补偿,各相电流正弦度良好。与正常状态下相比,B、E两相电流幅值相等,C、D两相电流幅值相等,且均大于正常状态下电流的幅值,剩余相电流的相位也发生了变化,这与理论相符。转矩脉动明显下降,电机能够获得较平稳的运行性能,有效地改善了电机的控制性能。
表1对比了FPMSM在正常、故障以及容错状态下输出转矩的性能。结果表明,容错控制策略能有效减少电机的转矩脉动,提升电机在故障状态下的转矩性能。
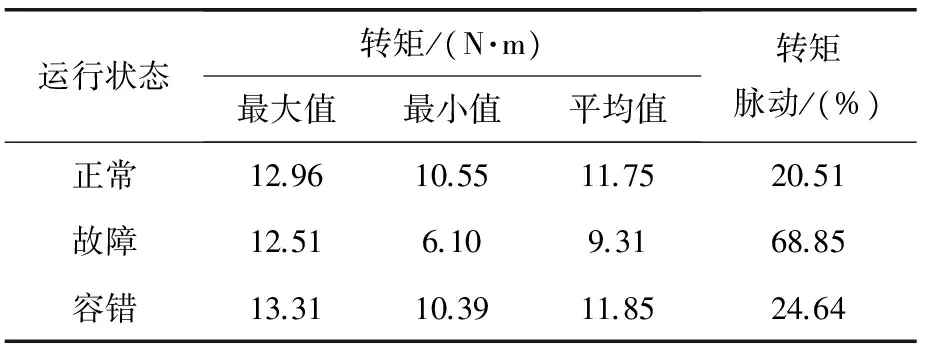
表1 不同运行状态下转矩性能
图7给出了在同一电机、相同输出功率的前提下,采用本文所提出的容错控制方法和文献[15]的容错控制方法所得到的铜耗的对比图。本文所提出的容错控制方法铜耗平均值为210.3W,而文献[15]铜耗平均值达到214.7W。因此,采用本文的容错控制方法能降低电机绕组的铜耗,电机的效率得到提高。

图7 铜耗对比图
4 结 语
本文以20/36极的FPMSM为研究对象,分析了电机在单相断路故障下的容错控制策略,主要结论如下:
(1)FPMSM在发生缺相故障后,以铜耗最小为目标,对故障相的电流进行补偿,保证了故障前后磁动势不发生变化,从而使空间能够形成圆形旋转磁场,保证电机缺相后的平稳运行。
(2) 在优化电流的基础上,推导出故障后的解耦变换矩阵,求解出电机在旋转坐标系下的数学模型,从而实现了故障状态下对励磁电流分量和转矩电流分量进行解耦控制,对转矩进行线性调节,增强抗干扰能力。
(3) 通过联合仿真的方法,验证了容错控制策略的有效性。本文所提出的容错控制算法能够在电机发生开路故障后,提供较好的转矩性能,转矩脉动较小,实现电机的平稳运行。
[1] 孙宇光,余锡文,魏锟,等.发电机绕组匝间故障检测的新型探测线圈[J].中国电机工程学报,2014,34(6): 917-924.
[2] 刘剑,苏健勇,杨贵杰,等.六相永磁同步发电机容错控制的谐波补偿研究[J].电机与控制学报,2014,18(1): 1-10.
[3] 赵品志,杨贵杰,李勇.五相永磁同步电动机单相开路故障的容错控制策略[J].中国电机工程学报,2011,31(24): 68-76.
[4]CHEHS,DURANMJ,LEVIE,etal.Postfaultoperationofanasymmetricalsix-phaseinductionmachinewithsingleandtwoisolatedneutralpoints[J].IEEETransactionsonPowerElectronics,2014,29(10): 5406-5416.
[5]YUF,CHENGM,CHAUKT.Controllabilityandperformanceofanine-phaseFSPMmotorunderseverefiveopen-phasefaultconditions[J].IEEETransactionsonEnergyConversion,2016,31(1): 323-332.
[6] 赵文祥,唐建勋,吉敬华,等.五相容错式磁通切换永磁电机及其控制[J].中国电机工程学报,2015,35(5): 1229-1236.
[7] 欧阳红林,周马山,童调生.多相永磁同步电动机不对称运行的矢量控制[J].中国电机工程学报,2004,24(7): 145-150.
[8]ZHAOY,LIPOTA.Modelingandcontrolofamultiphaseinductionmachinewithstructuralunbalance.PartⅠ:Machinemodelingandmulti-dimensionalcurrentregulation[J].IEEETransactionsonEnergyConversion,1996,11(3): 570-577.
[9]ZHAOY,LIPOTA.Modelingandcontrolofamultiphaseinductionmachinewithstructuralunbalance.PartⅡ:Field-orientedcontrolandexperimentalverification[J].IEEETransactionsonEnergyConversion,1996,11(3): 578-584.
[10] 於锋,程明,夏子朋,等.3种谐波电流注入模式下的磁通切换永磁电机缺相容错控制[J].中国电机工程学报,2016,36(3): 836-844.
[11] 周长攀,杨贵杰,苏健勇,等.基于正常解耦变换的双三相永磁同步电机缺相容错控制策略[J].电工技术学报,2017,32(3): 86-96.
[12]ZHOUH,ZHAOW,LIUG,etal.Remedialfield-orientedcontroloffive-phasefault-tolerantpermanent-magnetmotorbyusingreduced-ordertransformationmatrices[J].IEEETransactionsonIndustrialElectronics,2017,64(1): 169-178.
[13]GUZMANH,DURANMJ,BARREROF,etal.Comparativestudyofpredictiveandresonantcontrollersinfault-tolerantfive-phaseinductionmotordrives[J].IEEETransactionsonIndustrialElectronics,2016,63(1): 606-617.
[14]CHENQ,LIUG,ZHAOW,etal.AsymmetricalSVPWMfault-tolerantcontroloffive-phasePMbrushlessmotors[J].IEEETransactionsonEnergyConversion,2017,32(1): 12-22.
[15] 谢德娥,王宇,邓智泉.考虑反电动势2次谐波的容错型磁通切换电机开路及短路故障控制策略[J].电工技术学报,2016,31(14): 130-138.
DecouplingFaultTolerantControlofFive-PhasePermanent-MagnetSynchronousMotorforSinglePhaseOpen-CircuitFaultBasedontheMinimumCopperLoss*
ZHAOMeiling,QUANLi,ZHANGChao,ZHUXiaoyong
(School of Electrical and Information Engineering, Jiangsu University, Zhenjiang 212013, China)
To improve the torque performance of five phase permanent magnet synchronous motor under fault condition, a decoupling fault tolerant control method based on minimum copper loss was proposed. The method which based on the principle of the constant stator magnetic motive force and minimum copper loss could be used to calculating the fault-tolerant current. Then, according to the compensation current, the reduced-order transformation matrix had been deduced. In the rotating coordinates, the mathematical model of the five-phase permanent-magnet synchronous motor was established. And the decoupling vector control method is achieved. The effectiveness of the proposed fault-tolerant control algorithm is verified by the method of co-simulation. The results of the simulation showed that the proposed fault-tolerant control could reduce the torque ripple under the faulty condition.
five-phasepermanentmagnetsynchronousmotor(FPMSM);open-circuitfault;copperloss;decoupling;fault-tolerantcontrol
国家自然科学基金项目(51377073)
赵美玲(1992—),女,硕士研究生,研究方向为多相永磁同步电机及其容错控制策略。
全 力(1963—),男,博士生导师,教授,研究方向为特种电机和汽车的电气控制技术。
TM 341
A
1673-6540(2017)12- 0126- 07
2017 -05 -23
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
大电机技术(2018年4期)2018-09-26 03:11:28
四川冶金(2018年1期)2018-09-25 02:39:26
通信电源技术(2016年1期)2016-04-16 04:57:26
西部广播电视(2015年1期)2016-01-15 02:05:37
电测与仪表(2015年13期)2015-04-09 11:57:36
电机与控制应用(2015年3期)2015-03-01 03:49:59
电测与仪表(2014年21期)2014-04-04 12:32:08
