
高速无轴承永磁电机设计与分析*
2018-01-05 04:39:16贾红云曹永娟
电机与控制应用 2017年12期
贾红云, 张 涛, 曹永娟
(1. 南京信息工程大学 江苏省大气环境与装备技术协同创新中心,江苏 南京 210044;2. 南京信息工程大学 江苏省气象能源利用与控制工程技术研究中心,江苏 南京 210044;3. 淮阴工学院 自动化学院,江苏 淮安 223005)
高速无轴承永磁电机设计与分析*
贾红云1,2, 张 涛3, 曹永娟1,2
(1. 南京信息工程大学 江苏省大气环境与装备技术协同创新中心,江苏 南京 210044;2. 南京信息工程大学 江苏省气象能源利用与控制工程技术研究中心,江苏 南京 210044;3. 淮阴工学院 自动化学院,江苏 淮安 223005)
高速电机具有高功率密度、能够减小设备体积与重量,可以直接驱动负载、提高传动效率,在航空航天、新能源、精密制造等领域具有广阔的应用前景。将无轴承永磁电机应用于高速驱动系统,在推导无轴承永磁电机数学模型基础上,提出了高速无轴承永磁电机设计方法。通过对一台额定功率2 300 W、额定转速8 000 r/min、调速范围0~60 000 r/min的高速无轴承永磁电机进行电磁和机械一体化设计,并采用有限元法对样机的电磁性能和动力学性能进行优化。仿真试验结果验证了所采用的设计方法的正确性。
高速电机;无轴承电机;永磁电机;电机设计;有限元法
0 引 言
由于高转速,相同功率的高速电机体积远小于中、低速电机。高速电机具有:高功率密度,节约材料,减小设备体积与重量;可与负载直接相连,取消了传统传动机构,减小传动损耗,噪声小;转子转动惯量小,动态响应快等优点,在离心压缩机、航空航天、高速电主轴、新能源等高速驱动领域具有广阔的应用前景。电机的高速化研究,正成为电机领域的研究热点[1-4]。
高速电机转子一般采用磁轴承支撑,具有无摩擦、无需润滑和维护,但是该结构的高速电机具有轴向长度较长,降低了转子临界转速,增加系统复杂性和造价。无轴承电机是将产生径向悬浮力的磁轴承绕组嵌入到电机定子槽中,转矩绕组与悬浮绕组极对数之间满足pM=pB±1,则电机在产生转矩的同时,也能够产生可控的径向悬浮力[5],通过闭环控制转子悬浮,减小高速电机转子轴向长度,降低系统复杂性。永磁电机具有结构简单、效率高、无励磁损耗等优点,所以无轴承永磁电机适合用于实现高速运行[5-9],但是如何对高速无轴承永磁电机进行设计还未有相关报道。
本文在推导无轴承永磁电机数学模型的基础上,重点对一台高速驱动用无轴承永磁电机进行电磁和结构设计,确定其主要尺寸参数,计算了两套绕组所需匝数,并采用有限元法计算悬浮力和转子强度与刚度,研究结果对高速无轴承电机设计具有重要参考价值。
1 高速无轴承电机系统结构
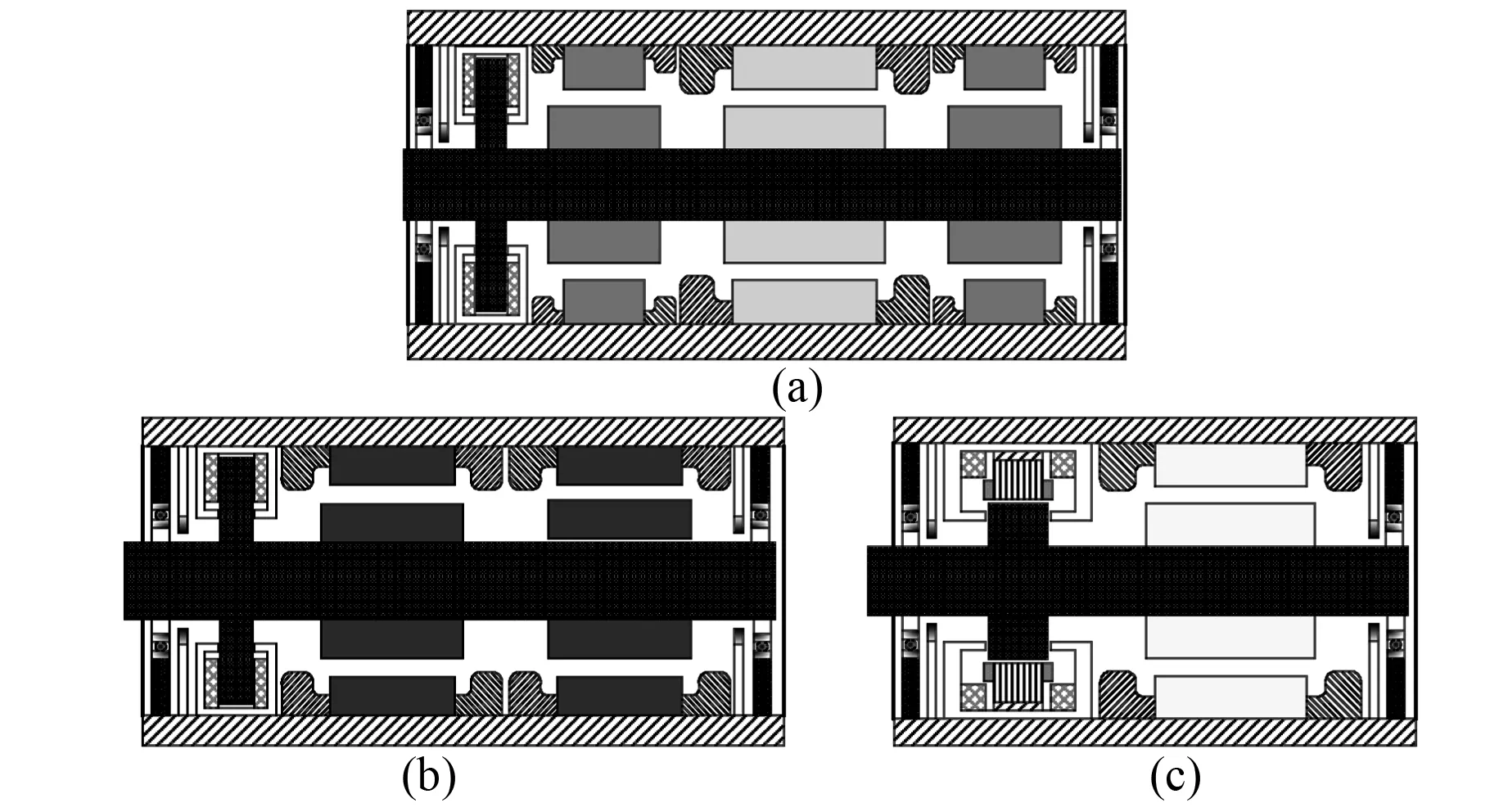
图1 高速电机结构
要实现转子悬浮,必须在5个自由度上对转子进行悬浮控制。图1给出基于磁悬浮技术的高速电机三种本体结构。图1(a)所示结构的高速电机系统由一个轴向单自由度磁轴承、两个径向2自由度磁轴承和一个高速电机单元组成;图1(b)所示是由一个轴向单自由度磁轴承、两个径向2自由度无轴承电机单元组成;图1(c)所示是由一个3自由度径向-轴向混合磁轴承和一个高速无轴承电机单元组成。这三种结构的高速电机系统都能够控制转子悬浮,实现转子在5个自由度上无接触高速旋转。在图1(c)中,混合磁轴承对一个轴向自由度和两个径向自由度进行悬浮控制,无轴承永磁电机单元控制径向2自由度和转子旋转,实现转子在5个自由度上悬浮,相对于其他结构的高速永磁电机,由于该结构仅由两个单元组成,结构简单,电机体积更小,所采用的位移传感器少;电机转子轴向长度较短,转子临界转速高,可以实现转子更高速度旋转。本文针对该系统的高速无轴承电机单元如何设计,展开系统研究。
2 无轴承永磁电机径向力数学模型
无轴承永磁电机转子受到pB极对数悬浮绕组电流产生的磁场和pM极对数永磁体磁场作用产生的径向悬浮力、转子偏心引起的单边磁拉力、悬浮绕组电流与永磁体磁场之间的洛伦兹力以及重力的作用,与永磁体磁场强度相比,负载运行时转矩绕组电流产生的磁场强度很小,对转子受力的影响可以忽略不计。无轴承电机通过控制悬浮绕组电流大小、悬浮磁场和永磁体磁场之间的角度来调节径向悬浮力的大小和方向,使得转子稳定悬浮时受力平衡,能够产生足够的径向悬浮力是无轴承永磁电机设计的关键。无轴承永磁电机中产生的径向悬浮力矢量可以由麦克斯韦应力张量法求得:
(1)
式中:Bn、Bt——气隙磁通密度的法向和切向分量;
μ0——真空磁导率;
dA——定子内表面面积;
D——转子外径;
l——铁心长度;
α——圆周角。
仅考虑基波部分,由转子表面永磁体产生的pM极对数的气隙磁场Bδ,M,附加的pB极对数的悬浮绕组电流产生的气隙磁场为Bδ,B,以及产生Bδ,B的电负荷AB可表示为
(2)
式中: 下标M——转矩绕组参数;
下标B——悬浮绕组参数。
气隙磁通密度和电负荷与圆周角α、角频率ω、时间t、初相位有关。电机气隙中的两个磁场相叠加得到气隙磁场的法向分量Bn(t,α)=Bδ,M(t,α)+Bδ,B(t,α),而切向分量为Bt(t,α)=μ0ABIB(t,α)。由式(1)、式(2)以及产生稳定可控径向悬浮力条件pM=pB±1和ωM=ωB,可得悬浮力在x和y方向分量为
(3)
式(3)中,第一项为两个磁场Bδ,B、Bδ,M相互作用产生的径向悬浮力,第二项为悬浮绕组电流与pM极对数的永磁体磁场Bδ,M之间的洛伦兹力,力的方向仅与悬浮磁场Bδ,B和转矩磁场Bδ,M之间的角度差γM-γB有关。Bδ,B还可以由AB表示为
(4)
将式(4)代入式(3),可得
(5)
式中:kw,B——悬浮绕组的绕组因数,当γM-γB=0或90°,在y或x方向获得的径向悬浮力最大。
根据给定的单位安培悬浮绕组电流产生的悬浮力F和气隙磁密Bδ,M,式(5)可计算出产生额定单位安培悬浮绕组电流径向悬浮力所需的电负荷AB:
(6)
由式(5)可知,单位安培悬浮绕组电负荷AB相对于磁场Bδ,M的方向由γM-γB决定,这样就很方便地控制径向悬浮力方向。将式(5)中的单位安培电流电负荷AB采用绕组串联匝数表示
(7)
进而可求出悬浮绕组每槽导体数
(8)
式中:m——定子绕组相数;
Ns,B——三相悬浮绕组每相串联等效匝数。
转子永磁体磁场方向γM可以由转子位置传感器测得,再通过逆变器调节悬浮绕组磁场方向γB来调节悬浮力方向。因此,如果相角差(γM-γB)为90°,悬浮绕组磁场和转矩绕组磁场一致,产生的力沿x方向。如果相角差为0°,两组磁场正交,产生的力沿y方向。
转子偏心也产生作用在转子上的径向力,即为电机中由于转子偏心而存在的单边磁拉力,方向指向气隙最小处δmin=δ-e,e为偏心矢量,Fe=ke。
(9)
其中:e=x+yj。
单边磁拉力在x和y方向的分量可表示为
(10)
式中:k——力/位移刚度,与电机转子永磁磁场极对数有关,极对数不同时,应按照式(9)分别进行计算。
无轴承永磁电机起动时,悬浮绕组产生的径向悬浮力必须大于单边磁拉力和重力,转子受力方程可表示为
(11)
按照式(11)构建转子位移闭环控制系统。采用径向位移传感器检测转子径向位移,与给定位移信号比较后经过控制器,转换为给定悬浮力信号;经过Park变换和逆变换,得到悬浮绕组电流给定信号。通过逆变器调节输出三相悬浮绕组电流,得到可调的径向悬浮力,从而使得转子能够稳定悬浮。由式(9)还可看出四极电机的单边磁拉力是两极电机的4倍,同时单边磁拉力和永磁体厚度、气隙长度密切相关,电机设计时必须准确分析计算无轴承永磁电机的单边磁拉力。
3 电机设计
高速无轴承永磁电机设计的基本原则:电机在满足额定功率的同时,还需产生额定径向悬浮力。对于相同结构的电机,当气隙长度和永磁体厚度相同时,产生的径向悬浮力最大[6],同时本文所设计的电机转速较高,需采用护套来固定转子永磁体,等效气隙长度大,为2 mm(包括护套厚度和实际气隙宽度),选择永磁体厚度为2 mm,24槽3相绕组。
3. 1 转矩系统设计
无轴承永磁电机永磁体产生的气隙磁密可表示为
(12)
式中:lm——永磁体厚度;
lδ——气隙宽度;
ks——永磁体覆盖率;
Br——永磁材料剩余磁感应强度。
当电机气隙与永磁体厚度相同时,永磁体气隙磁场强度达到最大,同时单位悬浮绕组电流产生的径向悬浮力最大。
按照电机尺寸方程,根据输入功率来确定电机转子主要尺寸[10]:
(13)
式中:D——转子外径;
l——转子有效长度;
P′——电机输入功率;
αi——极弧系数;
KBM——气隙磁场波形系数;
KwM——定子基波绕组系数;
AM——转矩绕组电负荷;
Bδ,M——气隙磁感应强度。
转矩绕组每槽导体数可采用电负荷AM表示为
(14)
式中:mM——相数;
IM,N——转矩绕组额定电流;
pM——转矩绕组极对数;
qM——转矩绕组每极每相槽数;
aM——并联支路数。
根据经验选择AM,就可以确定转矩绕组每槽导体数。
3. 2 悬浮系统设计
由式(6)~式(8),根据单位安培悬浮绕组电流产生悬浮力设计要求,可以确定悬浮绕组电负荷AB,进一步可以推导出悬浮绕组每槽导体数,按照上述方法,根据给定的输入功率和给定悬浮力参数就可以正确设计无轴承永磁电机。
电机设计参数为:电机输入功率P′=2 300 W,额定转速nN=8 000 r/min,单位安培悬浮绕组电流产生的径向力F/I=40 N/A,转子能够在转速为60 000 r/min时具有稳定可靠的机械强度。选择永磁体厚度2 mm,等效气隙长度2 mm,剩余磁感应强度Br=1.2 T。根据经验转矩绕组电负荷取AM=14 560 A/m,αi取0.7,绕组系数0.9,由式(12)计算出永磁体气隙磁场强度幅值为0.6,l/D=1.27,由式(13)计算可得,D=63 mm,l=80 mm,由电负荷AM和式(14)可以计算出转矩绕组每槽导体数为40匝。
根据悬浮力设计要求,单位安培悬浮绕组电流产生悬浮力为F/I=40 N/A,由式(6)计算出所需的单位安培悬浮绕组电流电负荷AB=4 683 A/m,然后由式(7)、式(8)可计算出悬浮绕组每相串联匝数Ns,B=309匝,每槽导体数NC,B=39匝,取悬浮绕组每槽导体数为40匝。根据上述的设计方法设计出的试验样机参数如表1所示。
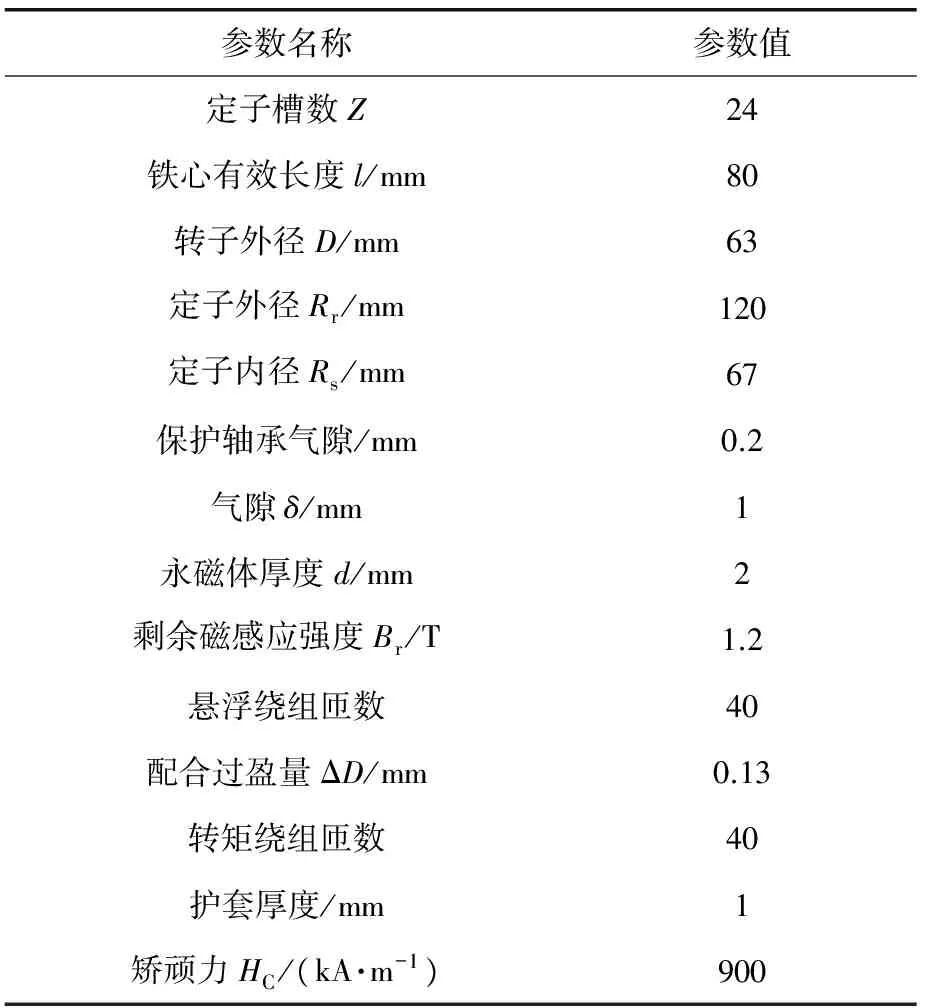
表1 试验样机参数
4 仿真试验分析
根据上述方法对高速无轴承永磁电机参数进行初步设计后,还需采用有限元法对试验样机进行分析验证。根据表1的样机参数建立有限元分析模型如图2所示。图2(a)给出了绕组分布,图2(b)为网格剖分图,悬浮绕组施加的三相电流为iA=Icos0°,iB=Icos120°,iC=Icos240°,I分别为1~8 A,计算出的径向悬浮力沿x正方向。理论计算结果和有限元计算结果如图3所示。有限元计算结果为每安培悬浮绕组电流产生的径向悬浮力为38.8 A,与设计结果相差3%,很好地验证了设计方法的正确性。
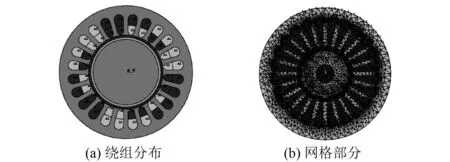
图2 有限元模型
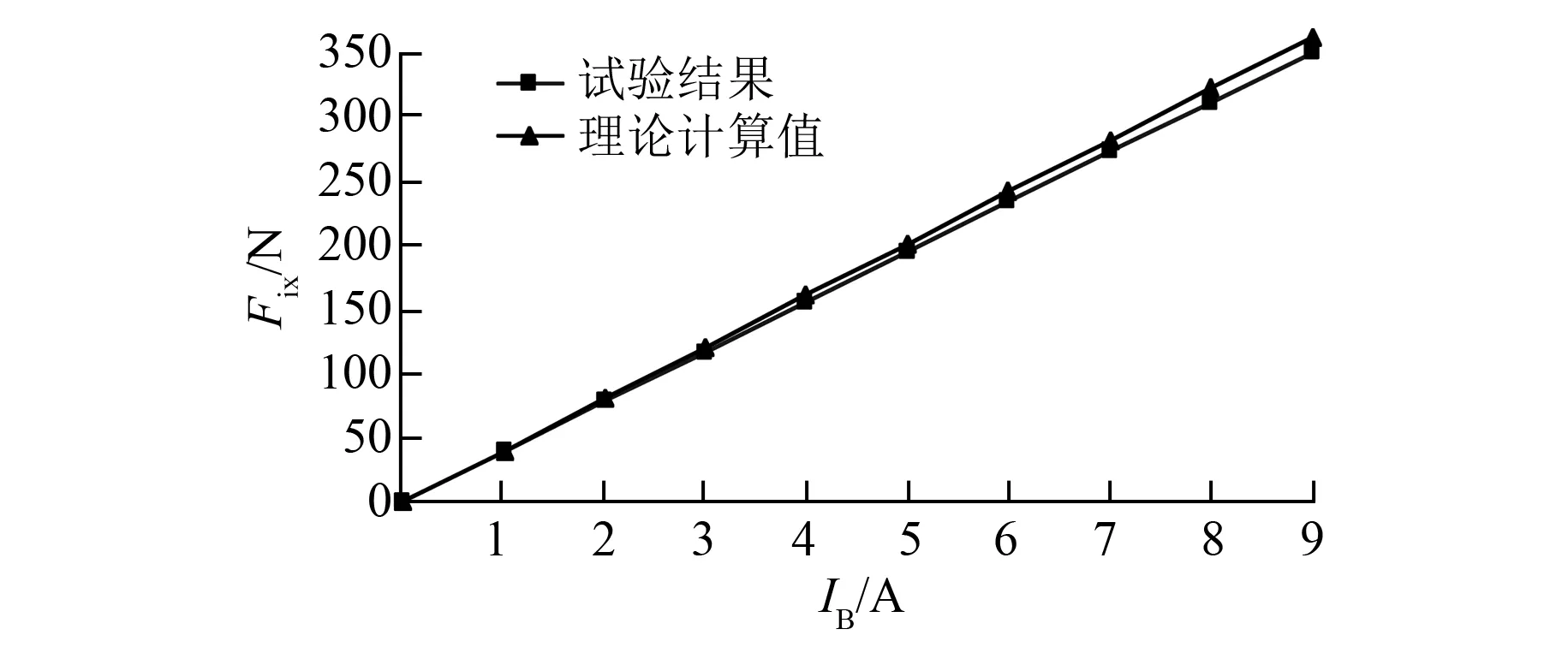
图3 径向悬浮力与电流的关系
由式(9)分析可知,四极永磁电机单边磁拉力约为两极电机的4倍,单边磁拉力与转子偏心位移、永磁体厚度、气隙长度密切相关,设计电机时还需对单边磁拉力进行准确计算。单边磁拉力的计算也采用有限元法,单边磁拉力与转子偏心位移关系如图4所示。单边磁拉力与转子偏心位移成正比,理论计算值与有限元计算值误差约为15%,主要原因是试验样机的气隙磁密幅值小于0.6 T所致。无轴承永磁电机起动时,单边磁拉力最大,此时悬浮绕组起动电流达到最大值,与图3比较后可知,至少需要5 A的悬浮绕组起动电流,才能使电机转子悬浮。高速无轴承永磁电机转子结构如图5所示。
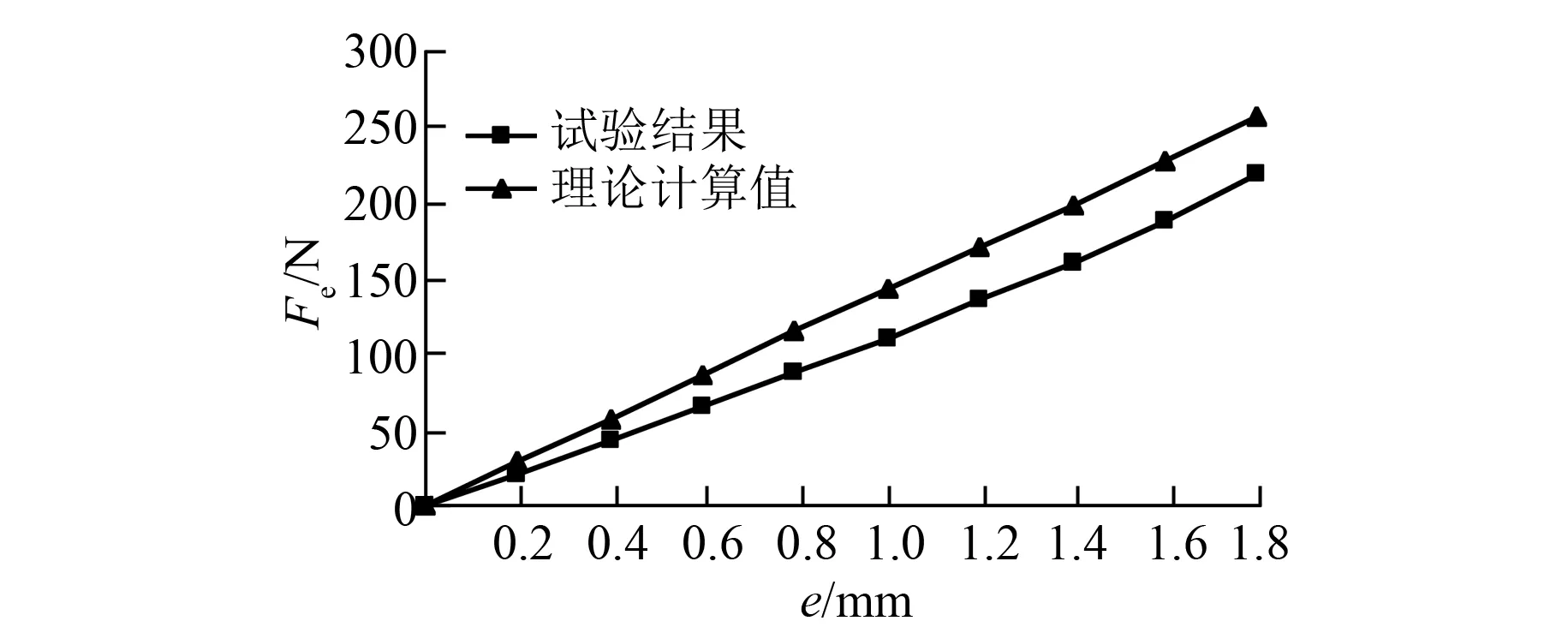
图4 单边磁拉力
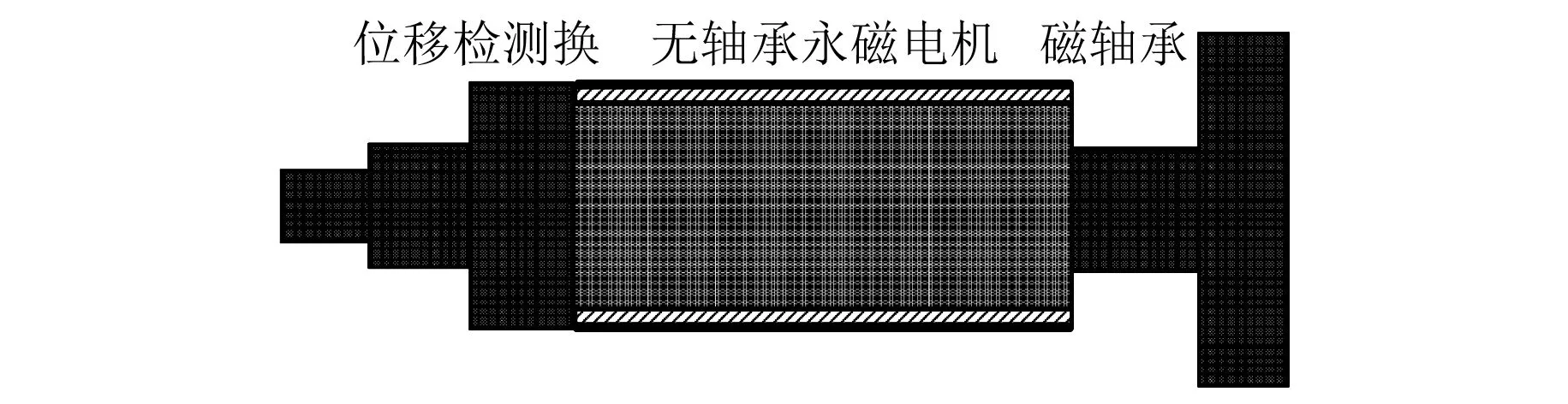
图5 高速无轴承永磁电机转子
4. 1 转子强度校核
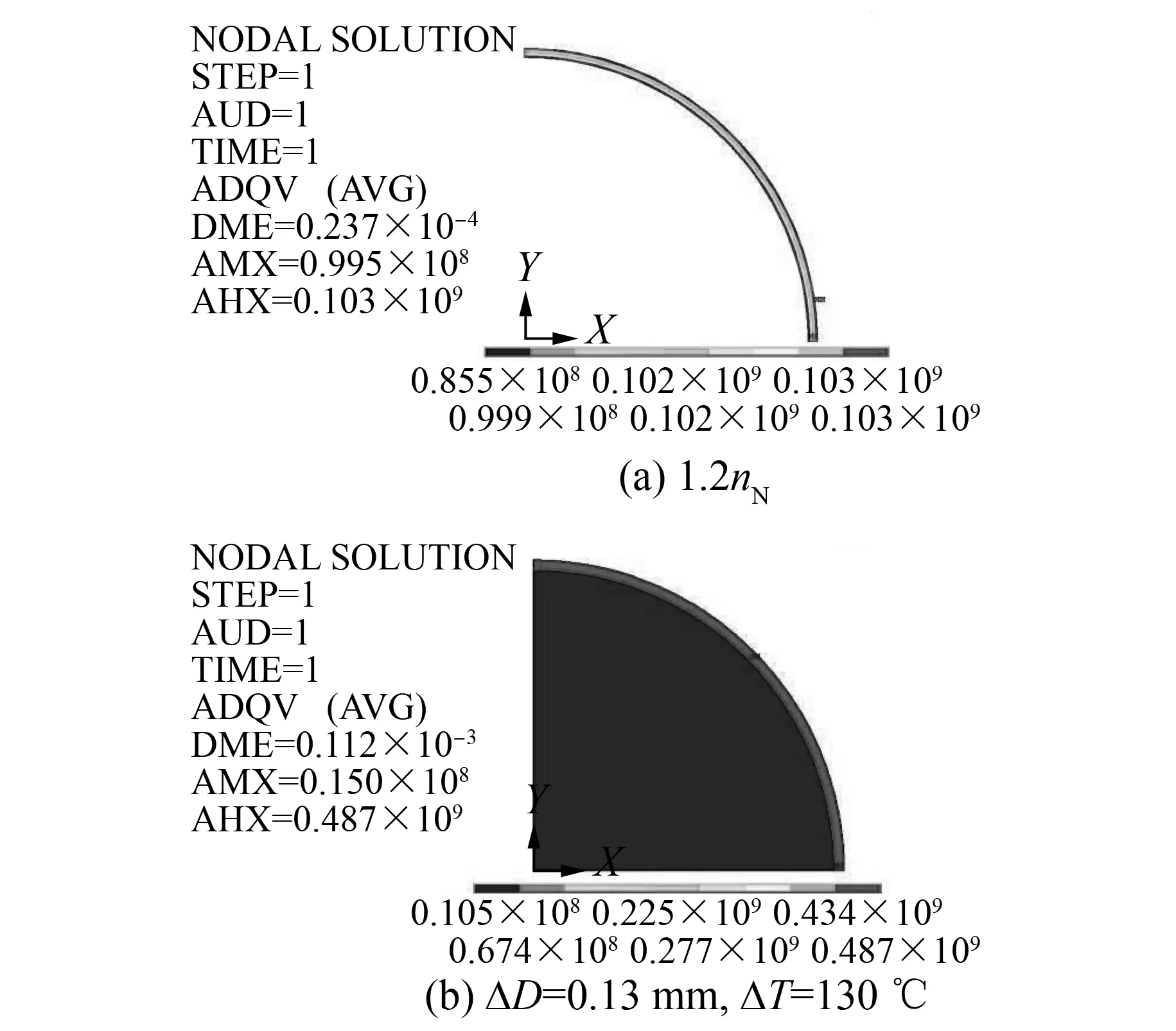
图6 护套Mises等效应力分布
高速无轴承永磁电机高速旋转时,转子圆周线速度可达200 m/s以上,转子表面会产生很大的离心力,使永磁体破碎和脱落。因此,对转子强度进行校核是高速电机稳定运进的关键[11-13]。永磁体能承受较大的压应力,所以设计时在永磁体外加一层碳纤维护套,碳纤维的应力极限可达1 100 MPa,采用过盈配合,保证在1.2倍的额定转速时护套和永磁体之间的压力大于零,同时应根据护套受到的应力低于应力极限的原则来正确设计过盈量。本文设计护套过盈量为0.13 mm。应力分析结果如图6所示。图6(a)为转速为1.2nN=72 000 r/min时,由旋转离心力引起的护套应力为103 MPa。图6(b)是过盈量为0.13 mm和温升130 K时,采用接触有限元法计算出的应力,约为487 MPa。对于本文设计的试验样机,当转子达到最高转速时,护套最大应力为590 MPa,小于护套应力极限,还可以看出由旋转引起的应力较小,只占20%,护套应力主要由预接触和热膨胀决定,护套对永磁体的压力为12 MPa,该转子满足强度设计要求。
4. 2 临界转速计算
由于电机转速较高,转速有可能会跨越第一阶临界转速,转子转速与临界转速相同时,会使电机-转子系统产生共振,使转子失控,所以设计的最高转速应低于第一阶临界转速的70%。本文采用结构有限元法对高速无轴承永磁电机转子进行模态分析,一阶振动模态如图7所示,频率为6 355 Hz,则一阶临界转速为381 000 r/min,远高于电机最高转速。
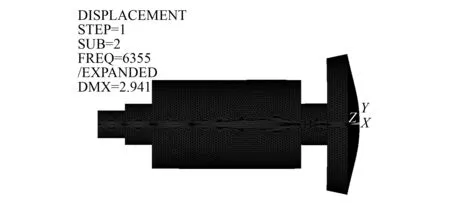
图7 转子一阶模态与频率
5 结 语
本文提出了一种高速无轴承永磁电机设计方法,推导其数学模型。根据给定输入功率和单位安培电流径向悬浮力确定电机转子主要尺寸和绕组参数,采用有限元法计算其径向悬浮力和单边磁拉力。有限元分析结果验证了理论计算结果的正确性。最后:对所设计的样机进行强度和刚度校核。仿真试验结果表明了本设计方法的正确性,可广泛应用于无轴承高速电机设计。
[1] 张凤阁,杜光辉,王天煜,等.高速电机发展与设计综述[J].电工技术学报,2016,31(7):1-18.
[2] 董剑宁,黄允凯,金龙,等.高速永磁电机设计与分析技术综述[J].中国电机工程学报,2014,34(27):4640-4653.
[3] 王凤翔.高速电机的设计特点及相关技术研究[J].沈阳工业大学学报,2006,28(3):258-264.
[4] KRASOPOULOS C T, BENIAKAR M E, KLADAS A G. Robust optimization of high-speed PM motor design[J].IEEE Transactions on Magnetics,2017,53(6):1-4.
[5] SUN X D, CHEN L, YANG Z B. Overview of bearingless permanent magnet synchronous motors[J].IEEE Transactions on Industrial Electronics,2013,60(12):5528-5538.
[6] OOSHIMA M, CHIBA A, FUKAO T. Characteristics of a permanent magnet type bearingless motor[J].IEEE Transactions on Industrial Application,1996,32(2):363-370.
[7] 朱熀秋,魏杰.内置式无轴承永磁同步电机径向悬浮力建模[J].电机与控制学报,2013,17(5):45-50,56.
[8] QIU Z J, DAI J, YANG J, et al. Research on rotor eccentricity compensation control for bearingless surface-mounted permanent-magnet motors based on an exact analytical method[J].IEEE Transactions on Magnetics,2015,51(11):1-4.
[9] ASAMA J, AMADA M, TANABE N, et al. Evaluation of a bearingless PM motor with wide magnetic gaps[J].IEEE Transactions on Energy Conversion,2010,25(4):957-963.
[10] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,2001.
[11] 程文杰,耿海鹏,冯圣,等.高速永磁同步电机转子强度分析[J].中国电机工程学报,2012,32(27):87-94.
[12] CHEN L L, ZHU C S. Rotor strength analysis for high speed permanent magnet machines[C]∥ 17th International Conference on Electrical Machines and Systems (ICEMS),2014:65-69.
[13] CHO H W, CHOI J Y, KO K J, et al. Rotor natural frequency in high-speed permanent-magnet synchronous motor for turbo-compressor application[J].IEEE Transactions on Magnetics,2011,47(10):4258-4261.
DesignandAnalysisonHigh-SpeedBearinglessPermanentMagnetMotor*
JIAHongyun1,2,ZHANGTao3,CAOYongjuan1,2
(1. CICAEET, Nanjing University of Information Science and Technology, Nanjing 210044, China;2. C-MEIC, Nanjing University of Information Science and Technology, Nanjing 210044, China;3. Faculty of Automation, Huaiyin Institute of Technology, Huaian 223005, China)
High-speed motor had some merits such as high power density, contact volume, smaller weight, and could directly drive load, so it had wide application prospects in the fields of aviation, new energy and precision manufacture. The bearingless permanent magnet motor was used in high-speed drive system. Based on the introduction of mathematical model, the design methods of high-speed bearingless permanent magnet type motor were principally discussed. The electromagnetic and mechanical design of a rated speed 8 000 r/min, speed range 0~60 000 r/min, 2 500 W high-speed bearingless permanent magnet motor was accomplished. Both the electromagnetic and dynamic performances of the motor were optimized based on finite element method. The simulation and experimental research results showed that the design method of high-speed bearingless permanent magnet motor proposed was correct and feasible.
high-speedmotor;bearinglessmotor;permanentmagnetmotor;motordesign;finiteelementmethod
国家自然科学基金项目(51307086,51507082)
贾红云(1979—),女,博士,研究方向为永磁型无轴承电机设计、驱动与控制等。
张 涛(1978—),男,博士,研究方向为永磁型无轴承电机设计、分析及非线性控制等。
曹永娟(1979—),女,博士,研究方向为永磁电机分析与设计等。
TM 302
A
1673-6540(2017)12- 0106- 06
2017 -07 -10
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
上海大中型电机(2021年1期)2021-06-09 09:12:04
微特电机(2021年1期)2021-01-25 03:23:14
防爆电机(2020年6期)2020-12-14 07:16:54
防爆电机(2020年4期)2020-12-14 03:11:08
防爆电机(2020年3期)2020-11-06 09:07:30
仪表技术与传感器(2020年5期)2020-06-11 07:01:10
大电机技术(2018年4期)2018-09-26 03:11:30
电工技术学报(2015年6期)2015-11-15 09:18:10
城市轨道交通研究(2015年5期)2015-02-27 11:02:05
