济南市轨道交通R1线卫星定位控制网复测稳定性的多限差分析
2018-01-04 03:27:16隋俭武李树文全金谊李罡
城市勘测 2017年6期
隋俭武,李树文,全金谊,李罡
(1.济南市勘察测绘研究院/山东省城市空间信息工程技术研究中心,山东 济南 250013;2.济南轨道交通集团有限公司,山东 济南 250013)
济南市轨道交通R1线卫星定位控制网复测稳定性的多限差分析
隋俭武1*,李树文1,全金谊1,李罡2
(1.济南市勘察测绘研究院/山东省城市空间信息工程技术研究中心,山东 济南 250013;2.济南轨道交通集团有限公司,山东 济南 250013)
城市轨道交通控制网是后续施工测量的基础,定期对其复测并分析其稳定性能有效保证工程各阶段的平稳推进。以济南市轨道交通R1线卫星定位控制网为例,通过引入坐标之差、相邻点坐标差之差的相对精度、距离较差、方位角之差、相邻边夹角之差等多个限差,分析控制网的稳定性。结果表明,两次测量点位坐标差、方位角之差、相邻点间坐标差之差的相对精度和距离差值对于发现不稳定控制点最为有效。考虑到实际通视边长条件的不同,综合分析相邻点间坐标差之差的相对精度和绝对误差能更有效地判定控制点的稳定性。
轨道交通;卫星定位控制网;稳定性分析;多限差法
1 引 言
城市轨道交通是指在不同型式轨道上运行的大、中运量的城市公共交通工具,主要特点是行车速度快、客流量大,单向高峰客流超过 30 000人次/h[1],并且具有良好的稳定性和平顺性[2]。城市轨道交通控制网是城市轨道交通工程施工的基准,其精度直接影响地铁隧道的安全及施工质量[3]。城市轨道交通工程施工期长且施工条件复杂,控制网易遭到破坏。相关测量规范及施工设计均要求对建成控制网定期开展复测工作并且根据控制点稳定情况调整复测频次。卫星定位技术已经广泛用于城市轨道交通工程测量中的一等平面控制网,定期开展卫星定位控制网的复测分析对于城市轨道交通的有序施工具有重要意义。
本文以济南市轨道交通R1线卫星定位控制网复测为例,利用原测和复测二维坐标的绝对坐标差、相邻点间坐标差之差的相对精度、原测与复测距离较差、原测与复测方位角较差和原测与复测相邻边夹角差五项限差,能够控制网中的不稳定点,为后续轨道交通控制网复测分析工作积累了经验。
2 研究数据
济南市轨道交通R1线是济南市轨道交通线网中贯穿西部新城南北的一条主干线,线路南起长清区池东村,沿丹桂路、海棠路,过芙蓉路、丁香路、大学路后,线路跨过济广高速公路,沿刘长山路向东偏北方向敷设,过玉符河后线路进入地下,沿刘长山路向东,下穿京福高速公路、京沪高速铁路,向北进入党杨路,过经十路后沿齐鲁大道经济南西火车站向北到达终点演马庄西站,全长 26.4 km,池东站-玉符河站为高架段,玉符河站-演马庄西站采用地下敷设形式,于2015年9月份开工建设。
控制网采用分级观测的方式,其中骨架网11个点,包含4个卫星定位控制点,3个JNCORS系统基准站,4个沿线B、C级GPS控制点;内部网共联测36个控制点,其中含B级GPS点1个,35个沿线轨道交通GPS控制点。复测采用相同方法进行,研究区线路走向、骨架网及内部网如图1、图2所示。
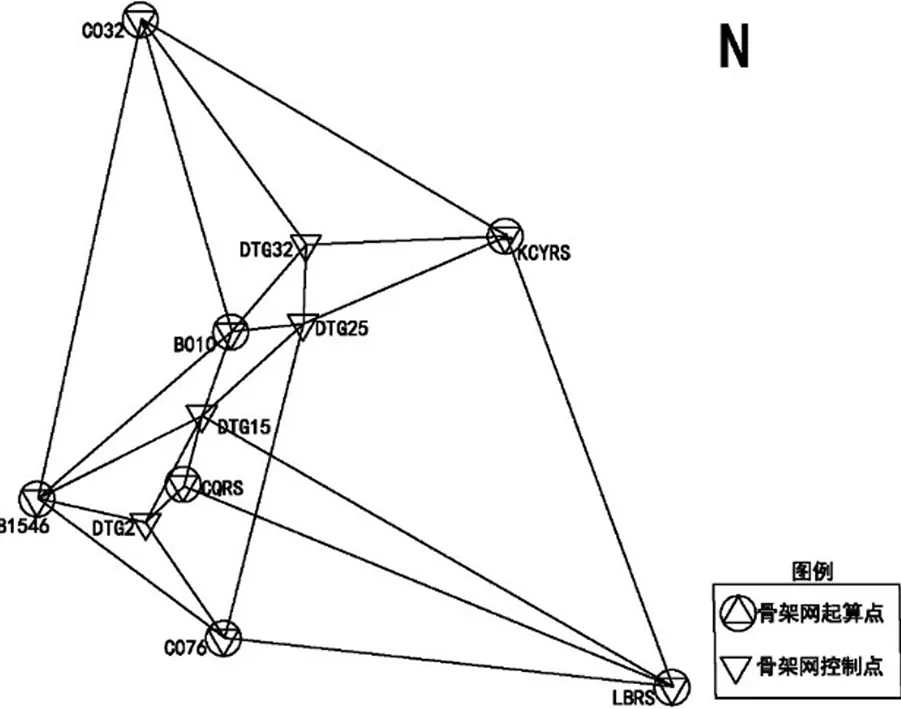
图1 济南市轨道交通R1线卫星定位控制网骨架网网形图

图2济南市轨道交通R1线卫星定位控制网内部网及线路走向示意图
按照《全球定位系统(GPS)测量规范》(GB T 18314-2009)10.1.2表5中C级控制网技术要求和《城市轨道交通工程测量规范》(GB 50308-2008)[1,6]表3.2.2和表3.2.8要求进行骨架网和卫星定位控制网的测量及数据处理,各项指标均满足规范要求,详细指标如表1所示。
3 研究方法
3.1 双限差指标

相邻点首次测量与复测坐标差之差的相对精度计算公式为:
其中:i、j指控制点号;
S为两相邻点间距离。

3.2 首次测量距离与复测距离较差

3.3 首次测量与复测方位角较差
3.4 首次测量与复测相邻边原测与复测夹角较差

=△αAB-△αBC
4 结 果
各项指标比较结果如表2所示。
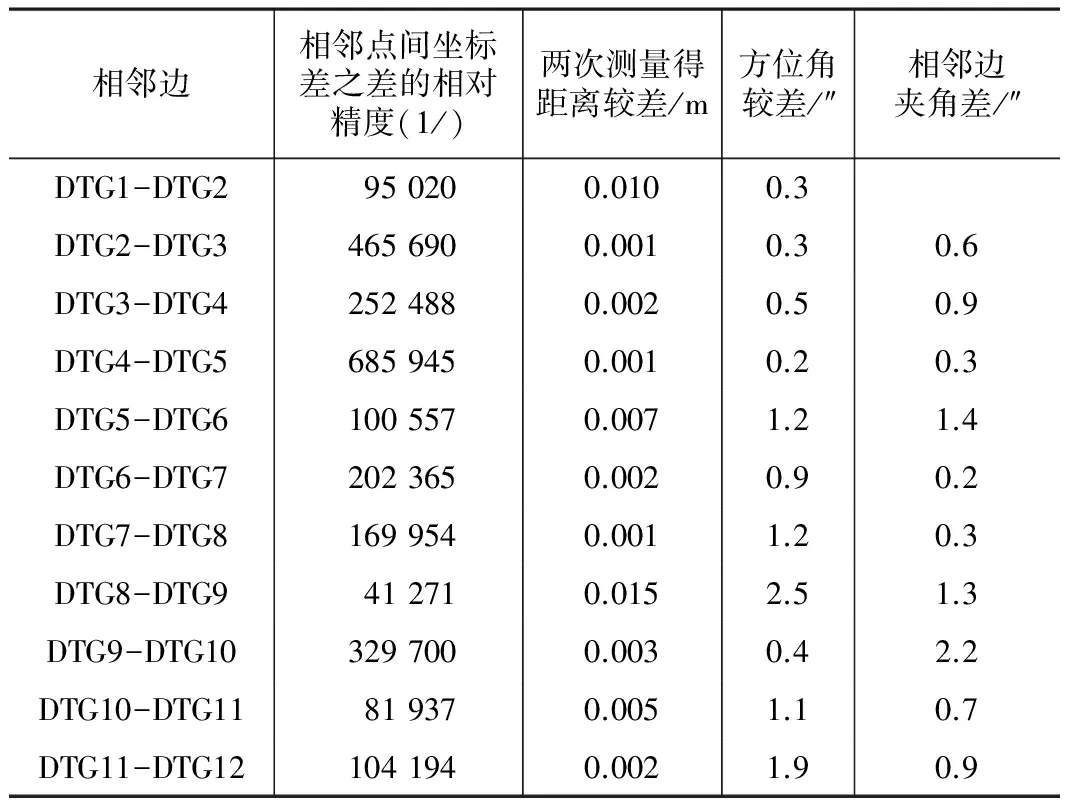
两次测量对应的四项限差差值统计表 表2
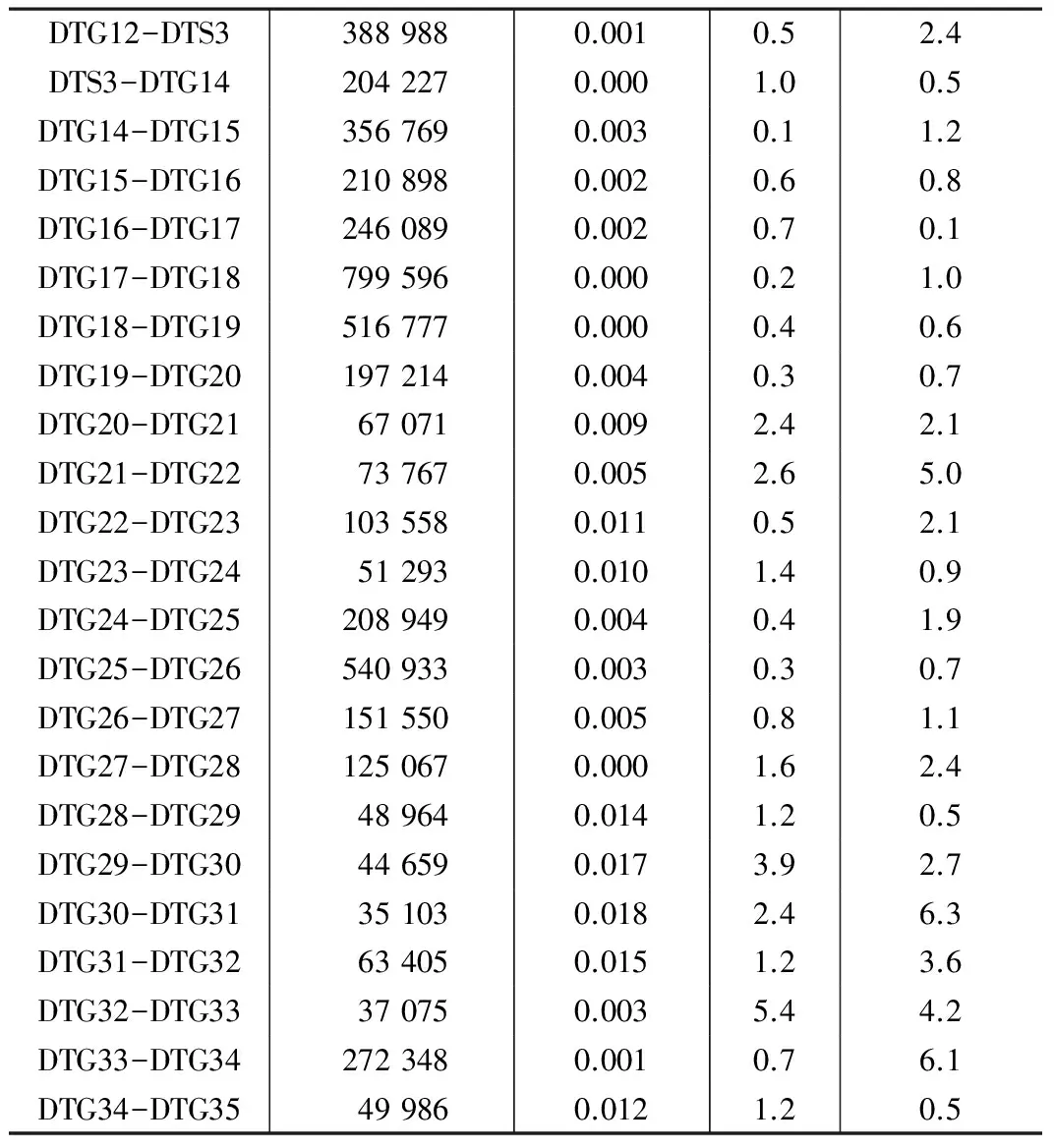
DTG12-DTS33889880.0010.52.4DTS3-DTG142042270.0001.00.5DTG14-DTG153567690.0030.11.2DTG15-DTG162108980.0020.60.8DTG16-DTG172460890.0020.70.1DTG17-DTG187995960.0000.21.0DTG18-DTG195167770.0000.40.6DTG19-DTG201972140.0040.30.7DTG20-DTG21670710.0092.42.1DTG21-DTG22737670.0052.65.0DTG22-DTG231035580.0110.52.1DTG23-DTG24512930.0101.40.9DTG24-DTG252089490.0040.41.9DTG25-DTG265409330.0030.30.7DTG26-DTG271515500.0050.81.1DTG27-DTG281250670.0001.62.4DTG28-DTG29489640.0141.20.5DTG29-DTG30446590.0173.92.7DTG30-DTG31351030.0182.46.3DTG31-DTG32634050.0151.23.6DTG32-DTG33370750.0035.44.2DTG33-DTG342723480.0010.76.1DTG34-DTG35499860.0121.20.5
比较两次测量相邻点间坐标差之差的相对精度,相对精度最大值为1/35103,最小值为1/799596,平均值为1/215394,超过限差1/80000的相邻边共10条边,占相邻边总数的30%;边长距离较差的最大值为 18 mm、平均值为 6 mm,最小值为 0 mm,两次测量距离较差超过 15 mm的共3条边,DTG29-DTG30、DTG31-DTG32、DTG8-DTG9,占总边数的11%;方位角较差最大值为5.4″,最小值为0.1″,平均值为1.2″,超过方位角较差限差4.8″的边有1条,DTG32-DTG33;相邻边夹角差最大值为6.3″,最小值为0.1″,平均值为1.7″,均满足限差6.8″要求;两次测量成果差值最大值为 25 mm,平均值为 7 mm,最小值为 0 mm,超过点位之差限差 24 mm的点有一个,占总控制点数的3%。
将上述各项超出限差要求的各边取并集,并对应计算相关点位的点位坐标差值,得到差值计算表(如表3所示)。
根据技术设计书要求及实际各相邻边边长,复测点位较差差值大于 24 mm的点取复测坐标成果,小于 12 mm的控制点沿用首次测量成果,大于 12 mm小于 24 mm点位综合分析与坐标差之差的绝对精度、相对精度及方位角较差。综上所述:DTG9、DTG20、DTG21、DTG22、DTG24、DTG28、DTG31、DTG33、DTG34沿用首次测量成果,DTG8、DTG23、DTG29、DTG30、DTG32、DTG35取复测坐标成果。
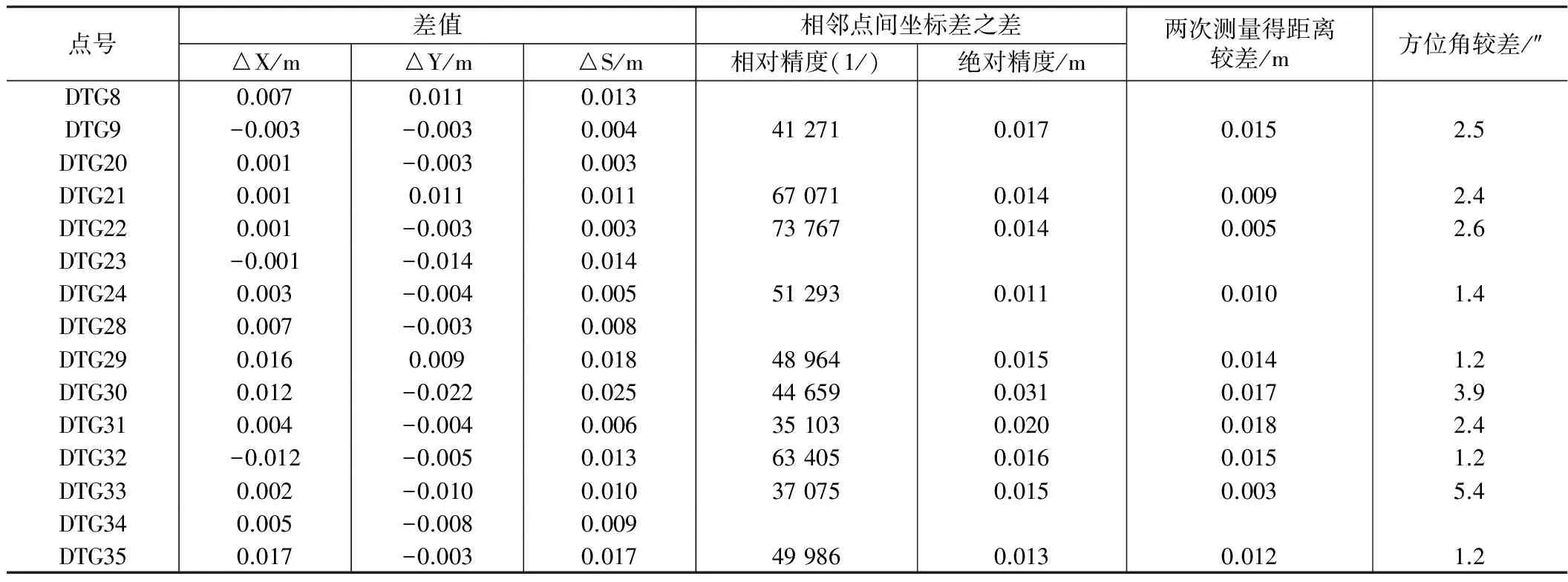
超限各项对应控制点两次测量统计表 表3
5 结 语
本文应用多个限差(点位坐标差值、相邻点间坐标差之差的相对精度、距离差值、方位角差值、相邻边夹角差)对济南市轨道交通R1线卫星定位控制网进行了逐层复测分析,准确、有效地找出控制网中不稳定的点位,分析发现两次测量点位坐标差、两次测量相邻点间坐标差之差的相对精度、方位角较差及距离差值最能有效找出不稳定的点位。综合分析相邻点间坐标差之差的相对精度和绝对误差对于分析结果更为有效。
城市轨道交通控制网是隧道贯通的保证和施工测量准确性的基础[5],从勘察设计、施工直至试运营期间,控制点易因周边环境变化、城市建设的原因发生变化,定期对控制网进行复测分析,能及时提供控制点准确成果,为后续土建施工单位进行加密控制测量提供基准、是后续施工的重要保障。
[1] GB50308-2008 城市轨道交通工程测量规范[S].
[2] 刘志,刘成龙,曹成度等. 基于多限差的高铁CPI控制网复测稳定性分析新方法研究[J]. 铁道勘察,2015,5:10~13.
[3] 张广伟,李鹏,宫辉. 城市地铁控制网稳定性分析及应用[J]. 测绘科学,2008,33(4):98~99.
[4] TB 10601-2009. 高速铁路工程测量规范[S].
[5] 谢煜,高源. 南京地铁四号线首级控制网复测与分析[A]. 江苏省测绘地理信息学会2014年学术年会论文集[C]. 2014:8~11.
[6] GB/T18314-2009. 全球定位系统(GPS)测量规范[S].
[7] 何佳. 成都地铁1号线控制网复测成果分析[J]. 城市勘测,2010,3:56~59.
[8] 张英翔,胡波,罗涛等. 京沪高速铁路CPII控制网复测技术研究[J]. 地理空间信息,2008,6(3):112.
[9] 刘鹏程,戴建清,匡志威. 长沙市城市快速轨道交通控制网的建立[J]. 城市勘测,2011(3):91~93.
[10] 陈华刚,郭彩立,岳仁宾. 重庆市轨道交通整体控制网建设研究[J]. 城市勘测,2014(5):102~104.
StabilityAnalysisBasedonMulti-tolerancesoftheRepetitionMeasurementinJi’nanRailTransitR1GPSControlNetwork
Sui Jianwu1,Li Shuwen1,Quan Jinyi1,Li Gang2
(1.Ji’nan Institute of Survey and Investigation/Shan-dong Engineering Technology Research Center of Urban Spatial Information,Ji’nan 250013,China; 2.Ji’nan Rail Transit Group Co.,Ltd,Ji’nan 250013,China)
Urban rail transit control network is the basis of follow-up construction measurement. Regular repetition and stability analysis can ensure the smooth progress of the various stages of the project. In this paper,taking an example of Ji’nan rail transit R1 line GPS control network,by introducing the difference between the coordinates,the relative accuracy of the difference between the adjacent points,the difference of the distance between adjacent points,the azimuth angle,between the adjacent edges,etc to analyze the stability of the control network. The results show that the relative accuracy,the azimuth angle and the difference of the distance between adjacent points can be the most effective for finding the unstable control points. Taking into account the actual conditions of the different conditions,comprehensive analysis the relative accuracy and absolute error of the difference between the adjacent points can be used to find unstable control point more effectively. The multi-tolerances method Proposed in this paper have a certain reference for the following-up urban rail transit control network stability analysis.
rail transit;GPS control network;stability analysis;multi-tolerances method
1672-8262(2017)06-101-04
P228,U213.2
B
2017—04—18
隋俭武(1981—),男,工程师,主要从事轨道交通测量等工程测量技术工作。
山东省住房和城乡建设厅科技计划项目(2017-K2-012);中华人民共和国住房和城乡建设部-济南市轨道交通R1号线科技示范项目。
猜你喜欢
小天使·五年级语数英综合(2021年2期)2021-06-15 01:26:03
卷宗(2021年2期)2021-03-09 07:57:24
装备维修技术(2020年21期)2020-04-22 11:31:59
空间科学学报(2020年4期)2020-04-22 01:17:04
中小企业管理与科技·下旬刊(2019年8期)2019-11-09 19:45:22
铁道标准设计(2019年1期)2019-01-10 11:31:16
河南科技(2015年18期)2015-11-25 08:50:14
考试周刊(2015年24期)2015-09-10 07:22:44
机械与电子(2014年3期)2014-02-28 02:07:48
科技创新导报(2013年5期)2013-04-29 09:56:13