倒V型槽道滑行艇船型的水动力性能研究
2018-01-03 06:26:40韩晓坤张元刚姬鹏辉
船舶 2017年6期
邹 劲 韩晓坤 张元刚 姬鹏辉
(哈尔滨工程大学 船舶工程学院 哈尔滨150001)
倒V型槽道滑行艇船型的水动力性能研究
邹 劲 韩晓坤 张元刚 姬鹏辉
(哈尔滨工程大学 船舶工程学院 哈尔滨150001)
考虑到高速航行时常规双体滑行艇阻力较大且艇体兴波严重,以及三体滑行艇独特船型所带来的优异快速性和兴波小等优良水动力性能,文章借鉴三体滑行艇的工作原理并应用于双体滑行艇,创新性提出倒V型槽道滑行艇的概念,并进行艇型结构设计和CFD水动力分析。模拟计算结果表明该艇型具有高航速时阻力增加缓慢和纵倾角变化平缓等优点。
倒V型槽道滑行艇;艇型结构;数值模拟;水动力性能
引 言
随着世界经济建设的迅速发展,高速水路运输需求与日俱增,其中双体滑行艇具有的众多优点,受到社会各界的重视和广泛应用[1]。为研究和提高双体滑行艇的性能,国内外有关单位进行了系统的基础试验和实船研制工作。
国外双体滑行艇发展较早,世界上第一艘双体滑行艇是由英国的Cougar公司在20世纪70年代首先研制成功,相比于常规滑行艇,较大幅度地拓宽了航行区域[2];根据“超临界航行”的工作原理,美国P·R·Payne教授提出一种双体超临界滑行艇方案“Wavestrider”[3],据称该双体滑行艇可在五级海况下达到最高航速80 kn;伊朗的SELF·M·S等人通过水池模型试验对比了在高傅氏数条件下单体滑行艇和双体滑行艇的阻力性能,试验结果表明:在高傅氏数的条件下,双体滑行艇具有更加优异的阻力性能和纵向稳定性[4]。
国内对双体滑行艇的研究起始于20世纪80年代。中国人民解放军总后勤部车船研究所在1992年成功研发国内第一条沿海高速双体槽道艇“海豹号”,随后,总后勤部军事交通运输研究所刘谦[5-8]等人采用水池模型试验法详细研究了双体滑行艇的主尺度、艇体线型以及槽道参数对其水动力性能的影响,并成功提出适合我国江域与海域状况的长城系列双体滑行艇;另外,哈尔滨工程大学的赵连恩、苏永昌[9-10]也多次开展双体滑行艇和槽道水翼艇的模型试验研究;大连理工大学的迟云鹏等人[11-12]通过模型试验详细研究高速槽道艇的阻力及耐波性能;针对滑行艇耐波性差的问题,海军工程大学的董祖舜等人提出超临界双体滑行艇的概念,从作用原理上解释滑行艇进入“超临界”航行状态的途径[13]。
近年来,三体滑行艇凭借其优良的航行性能,开始受到航运界和各国海军的重视,国内对三体滑行艇的研究也加快步伐并取得阶段性成果。如哈尔滨工程大学的邹劲及其带领的团队陆续发表一些关于三体滑行艇的阻力、耐波性、稳定性等文章。其中,王庆旭等人已通过模型实验和CFD模拟等方法证明中高速阶段三体滑行艇相对于双体滑行艇的阻力和耐波性等优势[14]。本文正是依据常规双体滑行艇的结构特点和三体滑行艇的工作原理,提出一种全新的滑行艇型——倒V型槽道滑行艇,其两个片体的滑行面为内倾式、槽道横剖面形状为椭圆形,如果具有优良的水动力性能,将有望在某些场合简化并替代艇型相对复杂的三体滑行艇,因而有必要对其滑行机理和水动力特性尤其是阻力性能进行深入的研究与分析,以期为本船型的后续研究工作提供理论参考。
1 倒V型槽道滑行艇艇型介绍
倒V型槽道滑行艇是依据普通双体滑行艇艇型结构和三体滑行艇的水动力原理而设计完成的新型槽道艇型,其充分的吸收了普通双体滑行艇艇型结构简单和三体滑行艇高速滑行时阻力小,兴波小的优点。如图1倒V型槽道滑行艇在外形结构上有两个明显的特点:
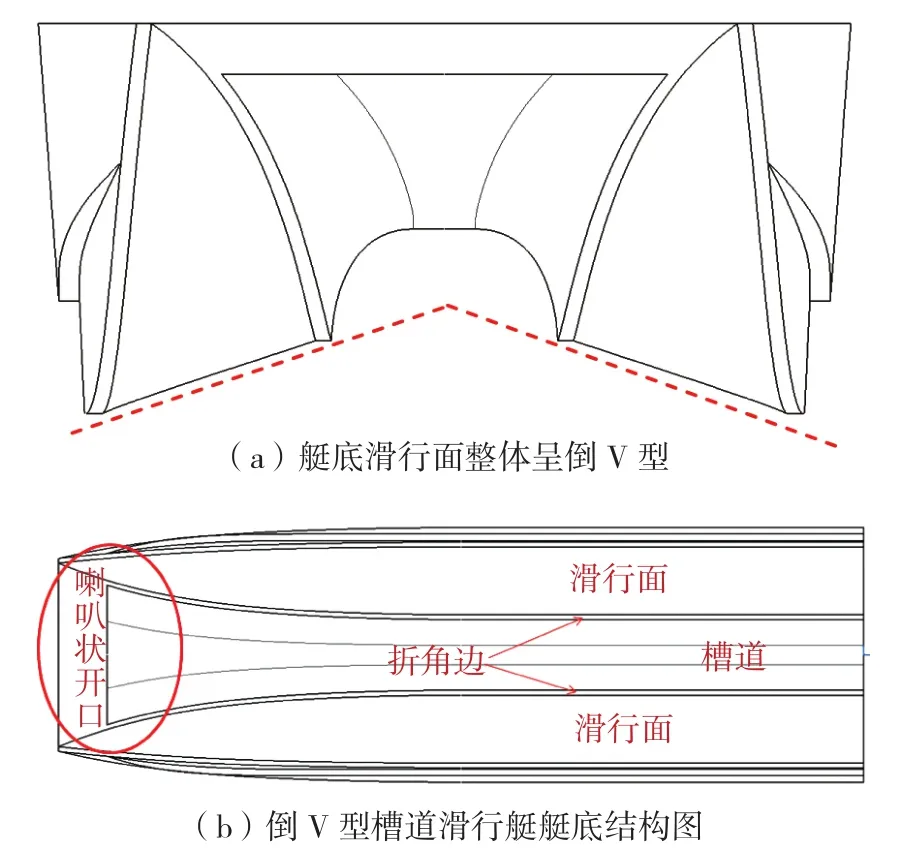
图1 倒V型槽道滑行艇结构图
(1)内倾式滑行面的侧片体。倒V型艇的主体结构为具有内倾式滑行面的两个对称侧片体,滑行面整体呈倒V型,侧片体舷侧则近似直壁,并增设折角线,滑行面在靠近槽道的一侧也设置折角边以改变水流方向从而减少水流对槽道的冲击,同时也有利于槽道内气旋的形成。
(2)椭圆形槽道。两个侧片体间由一个横剖面近似为椭圆形的槽道连接,即顶部为平直段,两侧采用圆弧过渡;在纵向上槽道宽度由尾部向首部逐渐扩大,在船首形成喇叭状开口以增加槽道的进气量。
本文中倒V型槽道滑行艇计算模型的船长为2.5 m、型宽为0.79 m、型深为0.35 m,其中槽道的宽度为0.22 m、单侧片体滑行面的宽度为0.21 m、舷侧折角边的宽度为0.02 m。模型排水量为130 kg,重心在(0.85 m、0 m、0.22 m)处。
2 数值计算方法
2.1 控制方程
不可压缩牛顿流体的运动满足连续性方程和动量守恒方程:

式中:μi和μj为速度分量的时均值(i,j=1,2,3);p为压力的时均值,ρ为动力粘性系数;为动量方程的广义源项。
2.2 湍流模型
SSTk-ω湍流模型综合标准k-ε湍流模型和标准k-ω湍流模型的优点,能够在精确反映实际流动状态的基础上同时具有良好的计算稳定性和收敛性。SSTk-ω湍流模型十分适合高速滑行艇水动力求解计算,因此本文的CFD模拟方案选择该湍流模型。
2.3 自由液面处理
自由表面问题的处理实际上就是追踪空气和水两种介质的运动界面。在船舶领域以VOF法最为常用,其基本思想是在网格中定义不同流体的体积函数F,F函数被定义为在控制体积内对流体的体积进行积分,根据每个网格单元内含有的某种流体的体积量来定义该网格处流体体积函数的值,从而进行运动界面的捕捉。具体而言,当一个单元为空(即没有指定相流体)时F的值为0,而当单元格内存在两相交界面时F值的大小则满足0<F<1。F函数满足以下方程式:

3 网格划分及精度验证
倒V型槽道滑行艇作为最新提出的一种艇型,因出现时间短而导致理论和实验研究的资料都极其匮乏。综合考虑我们选择艇型结构和水动力作用原理相似的三体滑行艇作为本论文的CFD验证的模型,以最大程度保证CFD计算方案的通用性。试验所用的三体滑行艇模型如图2所示:船模总长为2.5 m、宽为0.87 m、型深0.31 m、重心位置在(0.75 m、0 m、0.22 m)处,排水量为130 kg。

图2 船模三维模型
本试验是在中航工业605研究所高速试验水池完成的,下文将参照试验工况进行数值模拟,并与试验结果对比分析。
3.1 计算域建立
由于滑行艇左右对称,为提高计算效率,本文采用单侧模型计算。流体域为一长方体,因滑行艇周围和自由液面附近的网格尺寸对计算的精度具有明显影响,故本文在艇体周围和水线面附近设置两个加密区以更精确地捕捉自由液面和艇体周围的流场细节。流场域的具体尺寸大小和边界条件设置见下页图3。
3.2 网格划分
网格划分是整个CFD模拟中人工干预最多的环节,因此寻找一套适合槽道滑行艇水动力计算的网格划分方案,是本文的一项重要工作。
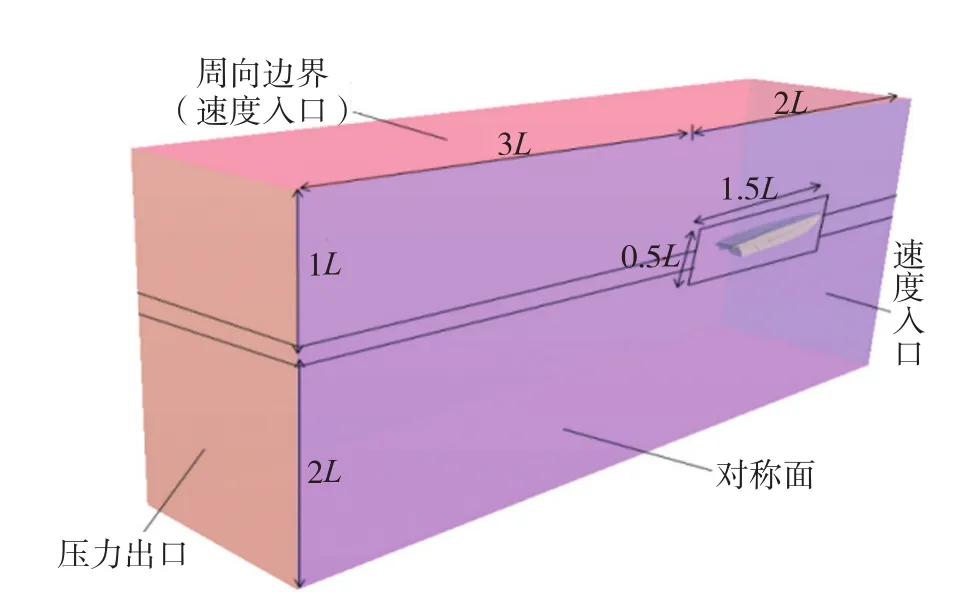
图3 流场域及边界条件的设置
本文的网格划分采用Star-ccm+软件自带的网格划分工具,网格类型为现在流行的切割体网格。对于两个加密区网格尺寸设置如下:船体周围加密区采用各向同性加密原则,网格大小设置为6‰L;自由液面附近加密区采用各向异性加密原则,网格尺寸在x、y方向设置为20‰,在z方向上设置为10‰。下面重点讨论船体表面网格和近壁面网格的划分。
3.2.1 船体表面网格的划分
对计算的船模表面网格尺寸分别取为4‰L、6‰L、8‰L、10‰L并进行网格划分,表1为不同情况下的计算结果及与试验值的对比。
通过对比可以看出,不同的船体表面网格尺寸对滑行艇阻力计算精度的影响比较明显。当网格尺寸取为4‰L时,由于舍入误差累积的影响,其计算的精度反而不是最优的;当采用10‰L的网格尺寸时,由于网格较粗,对三体滑行艇难以做到比较精确的贴体,阻力计算的误差比较大;当网格尺寸取为6‰L和8‰L时,计算精度相近,且都满足工程需要。因此,本文将船体表面网格尺寸设置为6‰L对船体表面进行划分。
3.2.2 近壁面处网格的划分
定义船体表面第一层网格节点的厚度以无因次参数y+表示,对于y+的取值,有研究指出,y+范围应在30≤y+≤200[15]。本文y+取为50、100、200三种情况进行探究。
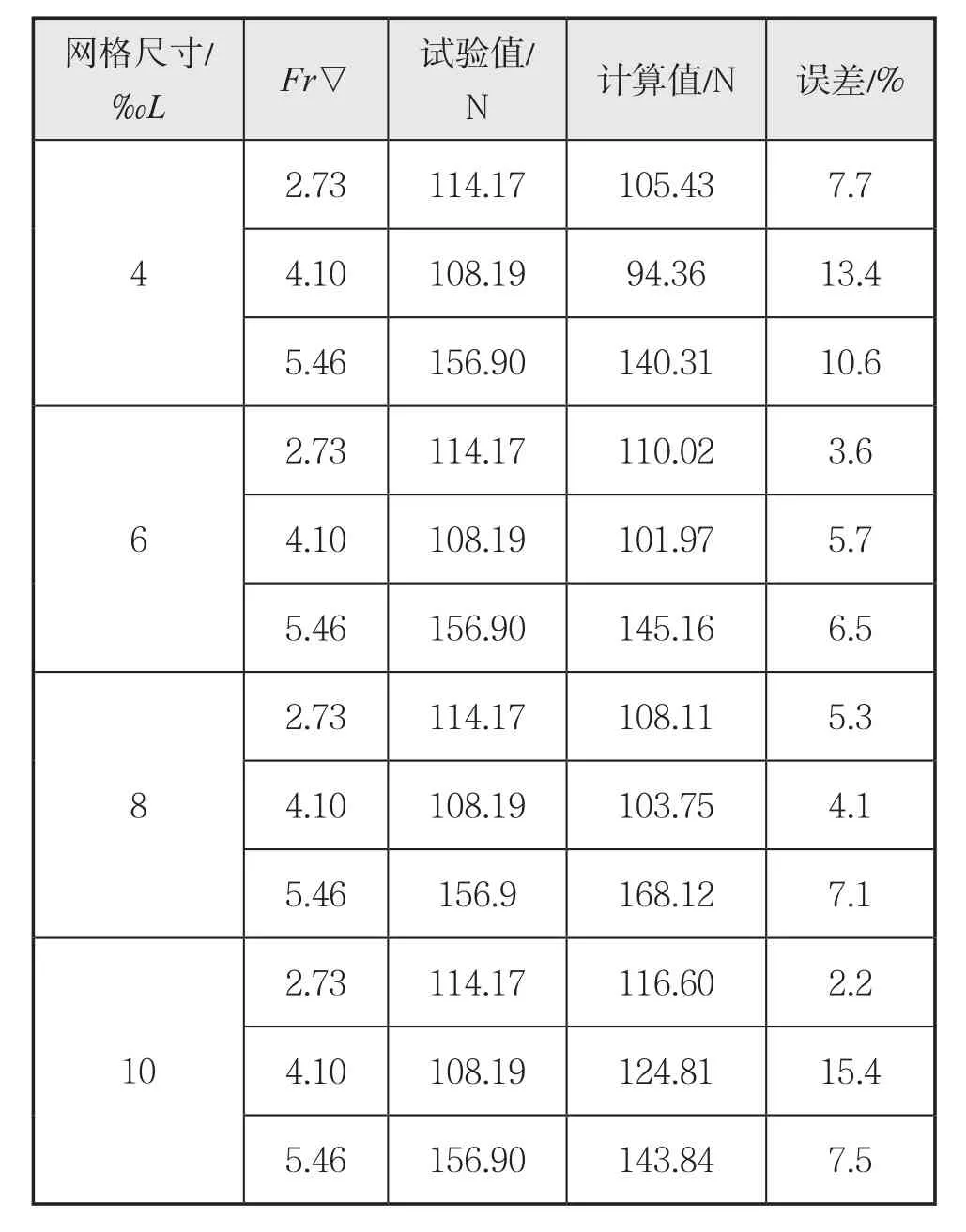
表1 不同船体网格尺寸结果分析

表2 不同y+条件下计算结果
从计算结果可以看出,y+的取值对带有槽道的滑行艇阻力计算精度的影响非常大。在半滑行状态,y+取为200时计算的精度最高,取为50时误差很大,已经不满足工程精度的要求;在滑行状态,随着y+的减少,计算精度不断提高。因此,本文在半滑行状态计算中y+取为200,在滑行状态y+取为100,在超高速阶段y+取为50。
依据以上提出的网格划分方案对流体域进行离散,网格划分结果如图4所示。计算所得的阻力、纵倾与试验值的比较分别如图5所示。
从阻力曲线图上可以看出,在全速度范围内计算值和试验值整体趋势相同,数值吻合性良好,其中阻力值最大误差出现在Fr▽=5.46处、误差为6.5%,最小误差出现在Fr▽=2.73处、误差为3.6%,计算误差满足本文研究的需要。
由纵倾曲线可以看到,艇体倾角计算值与试验值整体趋势相同,计算精度良好。

图4 网格划分

图5 试验值与计算值比较
4 倒V型槽道滑行艇水动力特性
为更好地分析倒V型槽道滑行艇的水动力特性,本节采用上文经过精度验证的CFD计算方案对该艇进行全速度段的计算,提取并分析部分水动力参数随速度的变化规律。
4.1 阻力特性
如图6所示,倒V型槽道滑行艇在全速度段内(本文中速度范围为0.9≤Fr▽≤5.83)只有一个阻力峰值R=116.8N,出现在Fr▽=1.82处,艇体在越过阻力峰后阻力迅速下降并在Fr▽=3.64处取得极小值R=81.1 N,此后随着航速的增加,艇体阻力平缓增长,在最大速度Fr▽=5.83处,阻力值为97.3 N,相比于极小值仅增加了16%,且明显小于低速航行阶段出现的阻力峰值。由阻力曲线的中后段可知(Fr▽≥3.59),倒V型槽道滑行艇阻力值随航速的增加虽保持着一定的增长趋势但增加幅度较低,阻力曲线平坦,即:高航速时,阻力增加平缓。
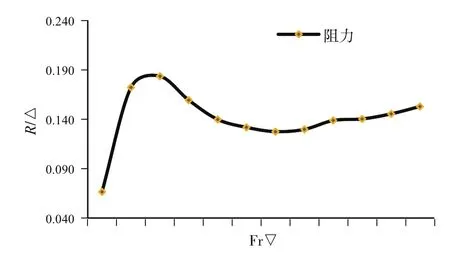
图6 阻力随速度的变化曲线
4.2 艇体纵倾随速度的变化规律
由图7可知,当航速为Fr▽= 0.9时,滑行艇处在排水航行阶段,此时纵倾角较小仅为3.83°,艇体主要依靠静浮力支持,与 一般的排水型船舶的航行姿态相似。随着航速的提高,滑行艇进入过渡航行阶段,艇体姿态发生剧烈改变,纵倾角先急剧增大并在Fr▽=1.8处达到整个速度段的最大纵倾值8.96°,然后艇体纵倾又快速减小。当滑行艇进入到相对稳定的滑行阶段后,随着航速增加,艇体的纵倾角虽仍保持着单调变小的趋势,但变化平缓,艇体的纵倾逐渐接近于静浮状态。
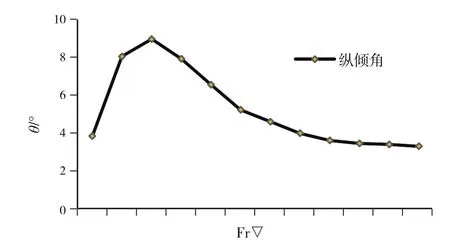
图7 纵倾角随速度变化曲线
4.3 槽道动升力特性
槽道滑行艇与单体滑行艇的最大区别在于,由于存在槽道升力,改变了艇体的航行姿态进而影响到滑行艇的水动力性能。当倒V型滑行艇以Fr▽<1的航速航行时,是处于排水航行阶段,艇体姿态与静浮时相差不大,两片体兴波非常小,槽道没有完全浸没在水中,其顶端处于贯通状态。此时,艇体重力几乎全部由艇体的静浮力提供,槽道内的流体动升力所占比重非常小,可忽略不计。
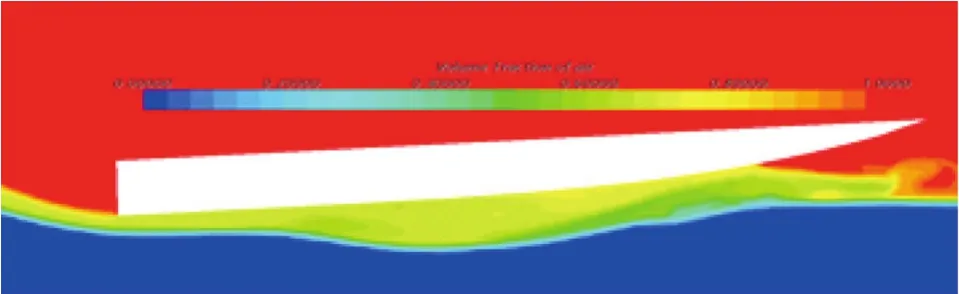
图8 槽道中剖面气液分布图(Fr▽=0.9)
当倒V型槽道艇刚进入到半滑行阶段(Fr▽=1.35),艇体具有较大的纵倾值和吃水。此时,槽道中部首先与自由液面接触形成一个压力集中区域,其后在槽道的泄流段槽道顶部再次与水面接触形成另一个压力集中区域由于槽道内兴波幅度较小,水流速度较低,这两个压力区域的压力值均较小,如图9所示。此外,由艇首引入的空气在槽道内水流的挤压下从艇体两侧和首部大量溢出,槽道内气体被挤压的程度较小,由此引起的槽道气动升力也非常小。这两方面因素导致此时槽道垂向升力非常小。随着航速的提升,槽道内由两片体引起的兴波幅度逐渐增加,槽道壁面受到兴波的拍打程度逐渐增加,因此槽道内由兴波引起的垂向升力逐渐增加。与此同时,槽道内空气引入量也逐渐增加,槽道内水密部分逐渐后移,气体所占区域逐渐增加,气体被挤压的程度也不断增加,因此由气体提供的垂向升力也逐渐增大,从而槽道的垂向升力不断增加。

图9 槽道中剖面气液分布图(Fr▽=1.35)
当航速提高到Fr▽= 4.04时,槽道内的气液分布达到临界状态,槽道内的兴波波面后移至槽道末端,但仍提供较大水动升力,整个槽道内部被气体所填充,槽道所受的气动升力达到最大,因此槽道升力也达到最大值。当航速再一步提升,滑行艇进入到超高速滑行阶段,槽道被气体贯通,槽道尾部的泄流量不断增加,槽道内兴波波面已完全脱离槽道。此时,槽道升力虽略有减小,但变化幅度却很小。槽道升力在全速度段的变化趋势如图11所示。

图10 槽道中剖面气液分布图(Fr▽=4.04)

图11 槽道升力随速度变化规律
对于高速时倒V型槽道滑行艇槽道能够保持较大的升力的原因分析如下:在高速航行时,槽道内纵向高速气流和由倒V型滑行面挤压形成的横向水流相互作用形成由艇首至艇尾螺旋式的高速气旋(如图12所示);而椭圆型的槽道壁面能够最大限度利用水气混合流中的能量(动能和压能)来维持较大的槽道升力。

图12 艇体横截面矢量图(Fr▽=5.83)
4.4 艇底压力分布变化情况
倒V型槽道滑行艇航行过程中姿态的变化会引起艇底压力分布的变化。当滑行艇在排水航行阶段时,其艇底压力分布均匀,没有明显的压力集中分布区域,与一般的排水型船舶的压力分布类似。在Fr▽=1.35时,滑行艇进入半滑行阶段,由于滑行艇处在纵倾和尾部吃水较大,造成了艇底压力主要分布在尾部。随着滑行艇航速的提高,艇体的吃水和纵倾逐渐变小,水流对滑行面和槽道的冲击逐步变大,因此艇底的压力分布主要集中在片体和槽道与自由液面接触处。当滑行艇进入到滑行和超高速滑行阶段,艇体吃水和纵倾都比较小,因此滑行面压力分布比较均匀,仅在与自由液面相交处稍显集中;另外,随着槽道内气流的贯通和水汽混合气旋的形成,槽道内的压力分布趋于均匀。

图13 不同速度下的艇底压力分布
5 结 论
倒V型槽道滑行艇是依据普通双体滑行艇艇型结构和三体滑行艇工作原理而提出的一种全新的艇型。模拟计算结果表明,该船型在高航速时具有随着航速增大阻力增加缓慢、纵倾角变化平缓、能提供较大动升力且变化平稳等优点,适合用作高速船型。本文以商业流体力学软件Star-ccm+为工具,对倒V型槽道滑行艇的阻力性能等水动力特性进行了详细研究与分析,并提供了可靠的数值计算方法,对于该类艇的水池模型实验和工程应用提供了相关技术支持,具有一定的理论参考意义和工程指导价值。
[ 1 ] 苏永昌. 高速双体滑行艇的特性以及在现代战争中的应用[J]. 现代科技译丛, 1995(1):1-6.
[ 2 ] 刘谦, 侯玉堂, 余吾弟,等. 双体滑行艇主尺度、线型和槽道参数对快速性的影响[J]. 中国造船, 1998(3):7-15.
[ 3 ] PAYNE P R. Supercritical planing hull[J]. Ocean Engineering, 1984(2):129~ 184.
[ 4 ] SEIF M S, AMINI E. Performance comparison between planing monohull and catamaran at high froude numbers[J]. 2004.
[ 5 ] 刘谦,侯玉堂,余吾弟,等. 双体滑行艇主尺度、线型和槽道参数对快速性的影响[J]. 中国造船, 1998(3):7-15.
[ 6 ] 刘谦,王振涛. 高速双体滑行艇的特点、用途及发展动向[J]. 江苏船舶, 1998(1):12-15.
[ 7 ] 刘谦,候玉堂,王振涛,等. 高速双体滑行艇设计试验研究[J]. 船舶工程, 1999(2):16-20.
[ 8 ] 刘谦,庞立国,王鲁,等. 高性能双体滑行艇设计[J].船舶, 2001(1):26-32.
[ 9 ] 苏永昌,赵连恩. 高性能槽道滑行艇的运动特性[J].中国造船, 1996(1):11-16.
[10] 赵连恩, 李积德. 槽道水翼滑行艇快速性能研究[J].中国造船, 1997(3):1-8.
[11] 迟云鹏,孟宪钦. 高速槽道艇阻力及耐波性能试验研究[J]. 船舶工程, 1995(3):27-31.
[12] 迟云鹏,王少新,孟宪钦,等. 槽道水翼滑行艇阻力性能试验研究[J]. 大连:大连理工大学学报, 1996(4):466-470.
[13] 董祖舜,高霄鹏,董文才,等. 超临界双体滑行艇[J].中国造船, 2000(3):1-8.
[14] 王庆旭. 三体滑行艇阻力和稳定性研究[D]. 哈尔滨:哈尔滨工程大学, 2012.
[15] 王福军. 计算流体动力学分析[M]. 北京:清华大学出版社, 2004.
满足升船机通航要求的首型商品汽车运输船试航成功
近日,中国船舶及海洋工程设计研究院(MARIC)为上海安盛汽车船务有限公司定向开发设计的800 PCC船首制船“安吉207”试航成功。“安吉207”的成功设计,充分彰显MARIC在新船型开发方面的优势。
该船是满足升船机通航要求的第一型商品汽车滚装船,对船型尺度、载重量、浮态等都有严格要求,项目组通过对油水舱的分布优化等措施,使得该船在升船机内均可达到完全平浮状态,最大化了船舶的装车数量。在设计过程中对船的重量重心进行了持续跟踪控制,最终空船重量完全满足预期要求。该船采用了偏心立柱、无梁拱抗薄板变形等多种创新结构设计方案,可兼顾三峡升船机、船闸、码头等多种情况的新型系泊布置方案,为适应目前市场不断增加的新能源车需求,船上还配备了应急充电桩等。
试航结果表明,“安吉207”的载重量、快速性、操纵性、振动噪声等关键技术指标均超过合同设计要求,完全满足内河绿色船舶-I的要求,并优于国内同类船型,具有先进的市场竞争力,得到了船东与船厂的一致好评。该船的成功设计将很好地发挥升船机快速通道的作用,促进长江黄金水道的通航效益,为长江上游水利资源的充分利用和中西部地区物流及经贸发展作出贡献。
On hydrodynamic performance of inverted V-shaped channel planing craft
ZOU Jin HAN Xiao-kun ZHANG Yuan-gang JI Peng-hui
(College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China)
The normal catamaran planing craft will generate greater resistance and severe waves on navigating at high speed. However, the trimaran planing craft has good hydrodynamic performance of excellent power performance and small wave making due to its unique hull form. A concept of inverted V-shaped channel planing craft is then proposed in this paper by applying the working principle of the trimaran planing craft onto the catamaran planing craft. It carries out the structural design of the ship hull and the hydrodynamic analysis of the hull form by CFD tools. The numerical simulation shows that the ship hull form has the advantages of the slow resistance increment and the flat trim angle variation in high speed.
inverted V-shaped channel planing craft; hull structure; numerical simulation; hydrodynamic performance
U661.1
A
1001-9855(2017)06-0013-08
10.19423 / j.cnki.31-1561 / u.2017.06.013
2017-04-10;
2017-04-21
邹 劲(1965-),男,博士,研究员。研究方向:高性能船的总体设计及新船型的开发。
张元刚(1991-),男,硕士。研究方向:高性能船水动力性能研究。
姬鹏辉(1991-),男,硕士。研究方向:高性能船水动力性能研究。
韩晓坤(1991-),男,硕士。研究方向:高性能船水动力性能研究。
猜你喜欢
船舶与海洋工程(2022年6期)2023-01-12 07:54:02
舰船科学技术(2022年22期)2022-12-13 03:37:24
舰船科学技术(2022年10期)2022-06-17 06:25:14
水上消防(2022年1期)2022-06-16 08:06:56
中国舰船研究(2022年2期)2022-04-26 07:51:20
电子设计工程(2022年7期)2022-04-20 07:23:56
深空探测学报(2019年5期)2020-01-19 01:34:46
船舶标准化工程师(2019年4期)2019-07-24 07:21:14
舰船科学技术(2018年7期)2018-07-25 06:30:18
中国舰船研究(2016年6期)2016-12-12 02:35:26